3d光学轮廓仪如何局部测量标准台阶?
一、标准台阶测量对智能制造领域的意义
在精密制造、半导体及材料研发领域,微观形貌的测量精度直接关系到产品性能与良率。如标准台阶的高度差、表面平整度参数在半导体芯片封装、3C电子器件加工、精密模具制造等领域中:
1、半导体领域的凸点台阶差 0.5μm 即决定良率生死线;
2、3C 领域的镜片台阶差 1μm 即影响用户体验;
3、模具领域的刃口台阶差 0.1mm 即造成百万级成本损失。
二、传统标准台阶测量难题
在标准台阶测量中,传统的二维测量手段(如轮廓仪或显微镜)仅能提供高度有限的线状数据,而二维数据难以准确捕捉台阶高度、边缘陡度、底面粗糙度等关键参数,无法全面反映三维表面的真实形貌,导致工艺优化缺乏数据支撑,缺陷分析效率低下。特别是在面对高反射表面、复杂纹理或透明材质时,传统干涉仪易受噪声干扰,测量结果稳定性差,重复性低。
1、精度缺失风险
接触式探针测量会产生5mN以上接触力,导致柔性台阶结构变形,1μm级台阶差测量误差常超过20%,直接影响芯片键合良率;
2、操作效率低下
手动调节Z向坐标寻找测量基准时,需反复切换速度档位试错,单次测量耗时超15分钟,无法满足量产线每小时200+样品的检测需求;
3、数据管理混乱
不同批次台阶样品数据随意存储,缺乏标准化命名规则,后续工艺追溯时需耗费数小时检索,延误问题排查时机。

三、解决方案:3d光学轮廓仪的智能干涉扫描技术
3D光学轮廓仪基于非接触式白光干涉技术,融合了光学位移传感与三维重建算法,构建了一套从数据采集到分析的完整工作流,让标准台阶测量更简单。
1、基本原理
(1)光通过干涉武警入射到样品表面,满足干涉条件则在物镜表面形成干涉条纹并出射。
(2)从样品表面底部到顶部逐层扫描,获得数百幅干涉条纹图像。
(3)3D光学轮廓仪通过将有规则的干涉条纹阴暗变化转换为高度变化来实时测量。通过拟合算法找到测量区域中每个像素点处于零级干涉条纹时所在的位置,即光强最大时的位置,则可知每个点的相对高度。
(4)扫描过程中,XY向静止,由相对高度可知每个点的三维坐标,进而完成三维重建。

2、三项核心技术突破
(1)自适应干涉追踪系统
0.1nm的纵向分辨率与实时条纹反馈机制结合,可在0.1秒内快速锁定干涉条纹。相较于手动调节,测量准备时间减少70%。
(2)智能扫描路径规划
对于台阶类样品特性,系统的“梯度扫描模式”通过识别条纹从下表面至上表面的移动轨迹,自动计算最佳扫描范围。
(3)多模态数据融合架构
在选定的局部测量区域内,系统同步采集形貌、粗糙度、波纹度等多维度数据,生成可关联分析的3D点云模型。配合专用分析模块,可直接输出台阶高度值、边缘倾角、底面平整度等12项参数。
3、国产3D显微测量软件——Xtreme Vision
Xtreme Vision显微测量软件是一款微观形貌测量分析平台,集成了3D形貌重建,多工具测量分析,影像观察测量以及自动化测量四大功能模块:
(1)非接触式无损检测,高精度全面三维成像,界面设计简明流畅;
(2)3D测量界面可以对扫描数据进行分析,丰富的测量工具包可还原样品微小细节;
(3)2D影像可用于直接对视场内样品标注测量,记录样品二维尺寸;
(4)自动化综合了所有测量场景,模板一键导入,就能自动高效完成任意多点位的测量分析所有流程。
四、标准台阶测量步骤
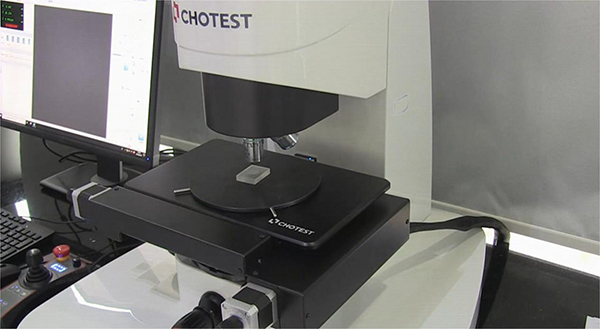
将标准台阶放置到载物台上镜头下方:
1、测量操作第一步:找到干涉条纹,使用操纵杆中间摇杆旋钮调节Z向上下移动,过程中配合速度档位的调节,找到干涉条纹。
2、测量操作第二步:扫描设置,根据待测区域特征,选择合适的扫描方式。标准台阶为台阶样品,从下往上扫描较为合适,微调Z向,观察干涉条纹从台阶下表面出现到在上表面消失对应的Z向坐标数值变化,设置扫描范围并填入。
3、测量操作第三步:数据命名和存储路径设置。根据样品名称或编号进行命名,并设置专用文件夹放置样本数据文件,点击局部测量图标,根据所需保留的特征使用套索进行框选。选择好之后点击开始图标即可进行扫描。

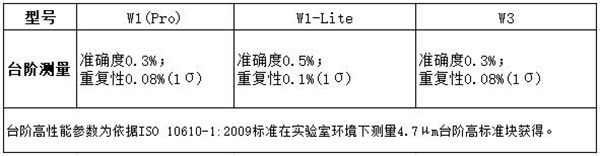
五、3D光学轮廓仪型号选择
恳请注意:因市场发展和产品开发的需要,本产品资料中有关内容可能会根据实际情况随时更新或修改,恕不另行通知,不便之处敬请谅解。
六、应用案例
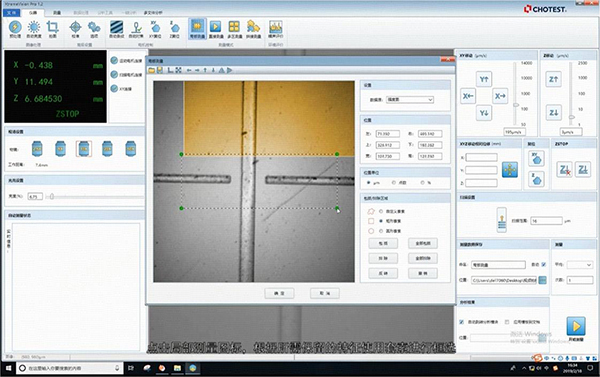
2D影像
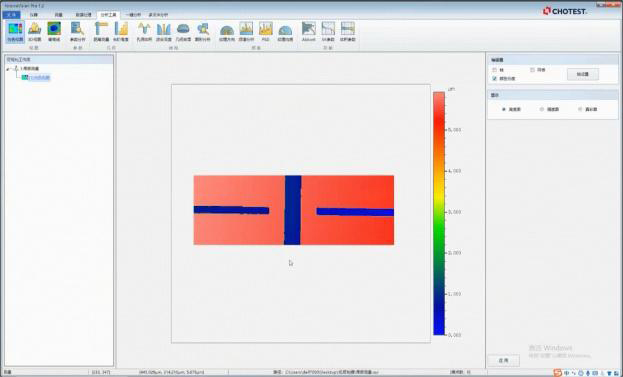

3D测量界面