5、foc控制系统——电流环设计
1、仿真条件设置
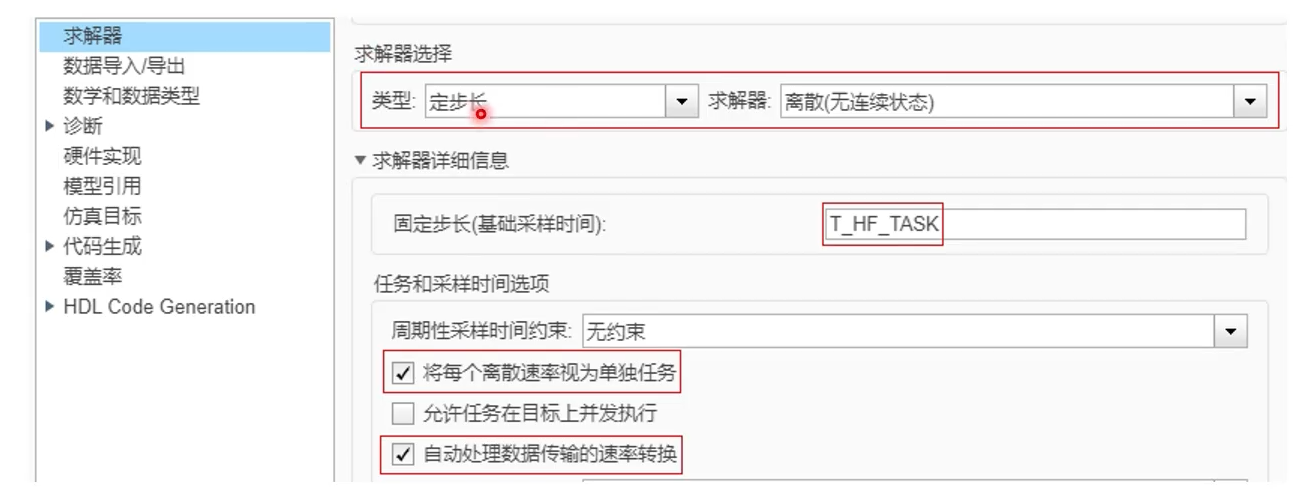
求解器:配置为定步长和离散型;固定步长与PWM频率保持一致,方便采样;
pwm频率:频率高,可提供更精细的控制,降低NVH,但会带来功率损耗和热量的增加;一般选在10K赫兹到24K赫兹
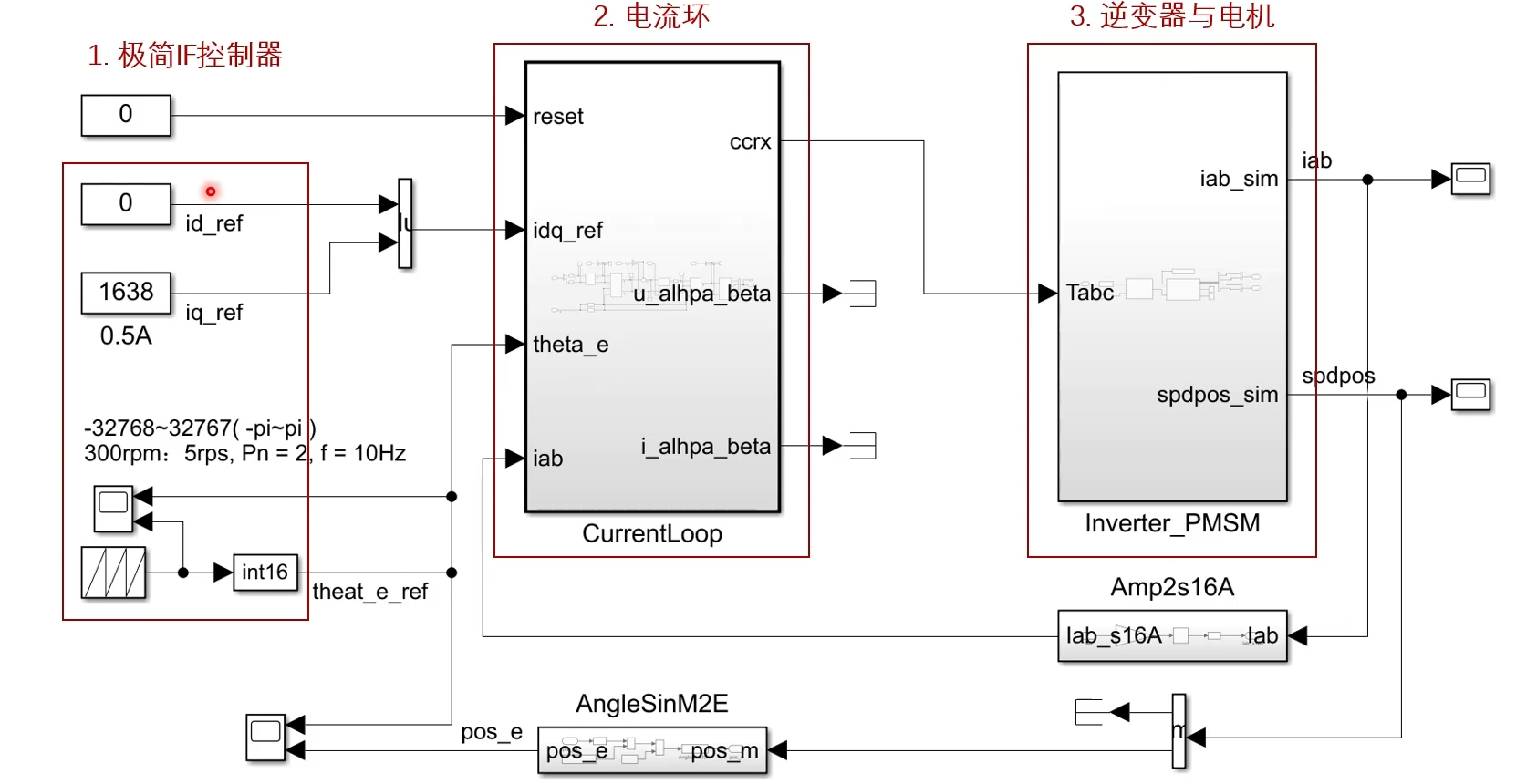
2、顶层模型
IF控制器一般有初始定位,电流的线性增加,根据参考转速生成对应频率的电角度;
设置id为0,iq为0.5A,这样参考电流,参考角速度,反馈的电流作为电流环的输入;电流环内部经过SVPWM计算,输出CCR(三相半周期作用时间);
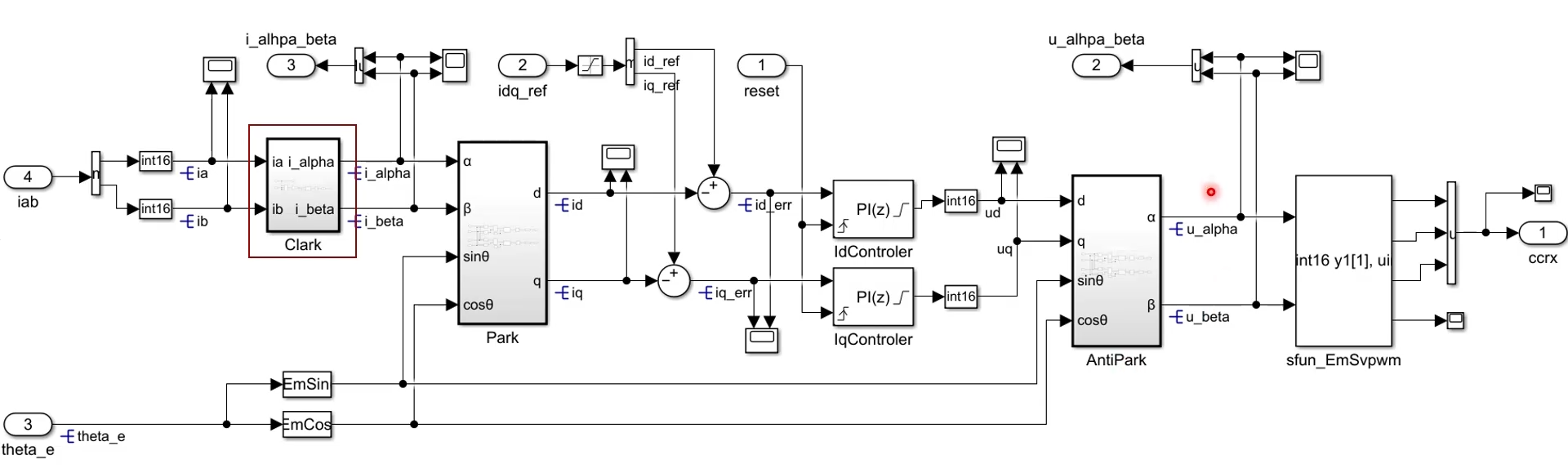
3、电流环
输入ABC坐标系下的反馈电流IA,IB,经过clark变换(三相变两相),输出αβ坐标系下的电流i_alpha,i_beta;经过park变换(交流变直流),得到dq坐标系下的反馈电流id,iq;它们和参考电流id_ref,iq_ref形成了电流误差,计算该电流误差作为PI控制器的输入;驱动PI控制器输出控制电压ud,uq,它们和电角度构成了旋转的电压矢量;通过antiPark变换(直流变交流),得到了αβ坐标系下的u_alpha,u_beta;通过SVPWM调制输出CCR(三相半周期作用时间)到逆变器及电机。
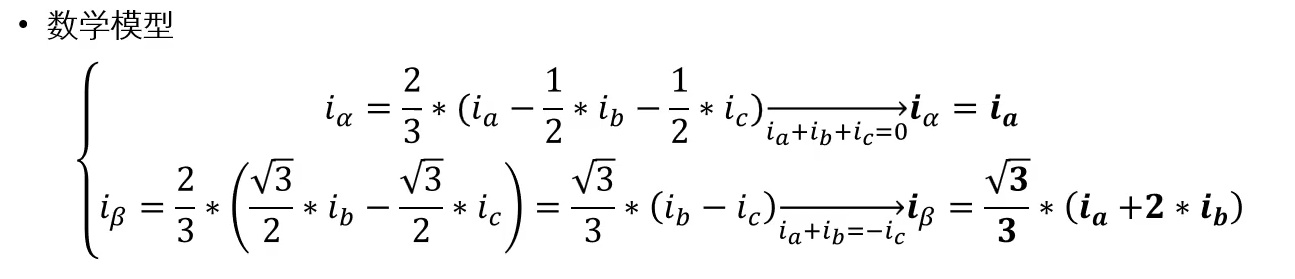
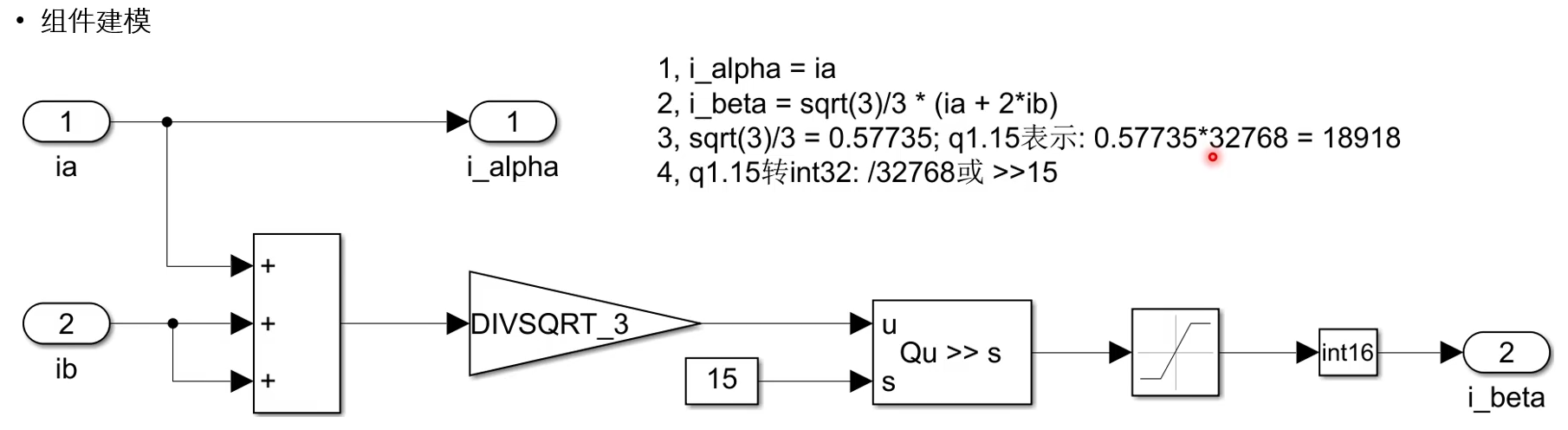
3.1clark变换
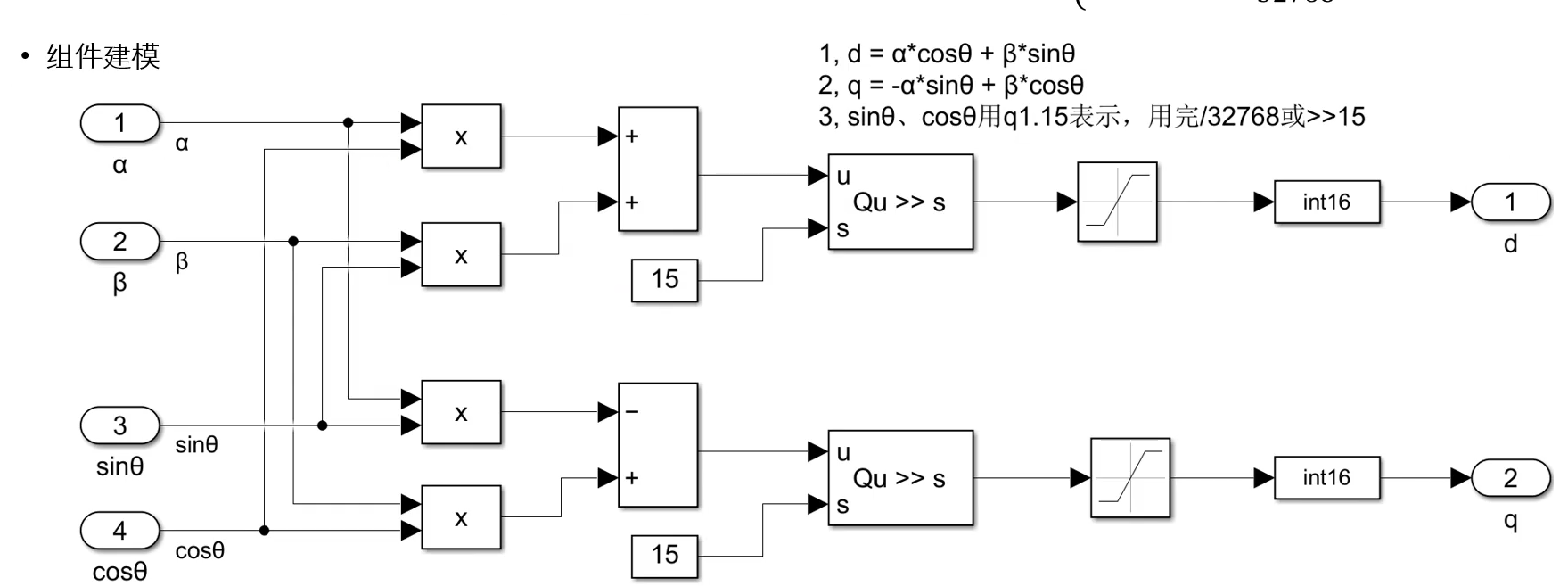
3.2park变换

3.3电流PI控制器
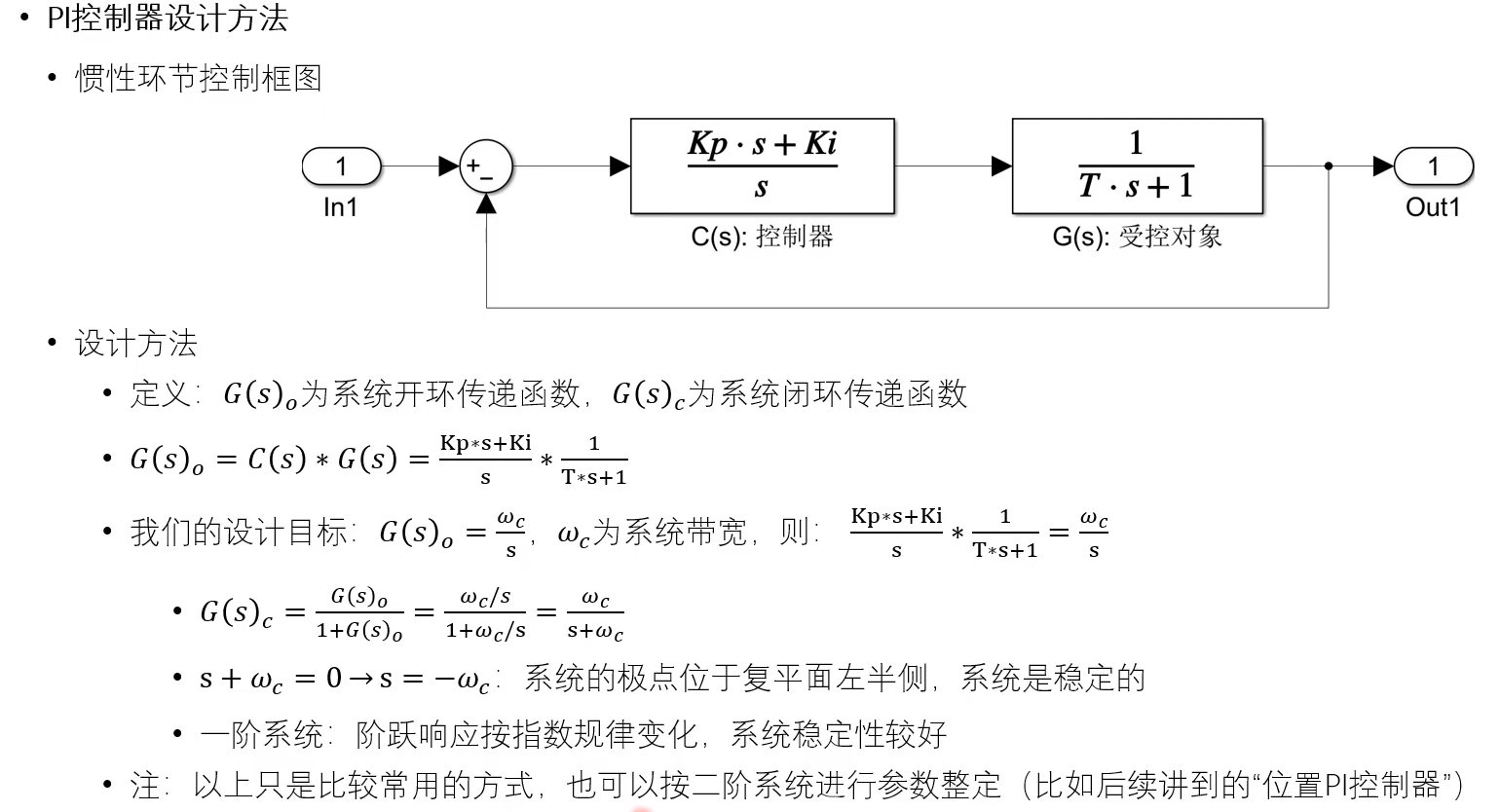
3.3.1PI控制器设计方法
被控对象传递函数的推导,依赖于DQ坐标下的电压方程以及磁链方程;
3.3.2电压方程的推导
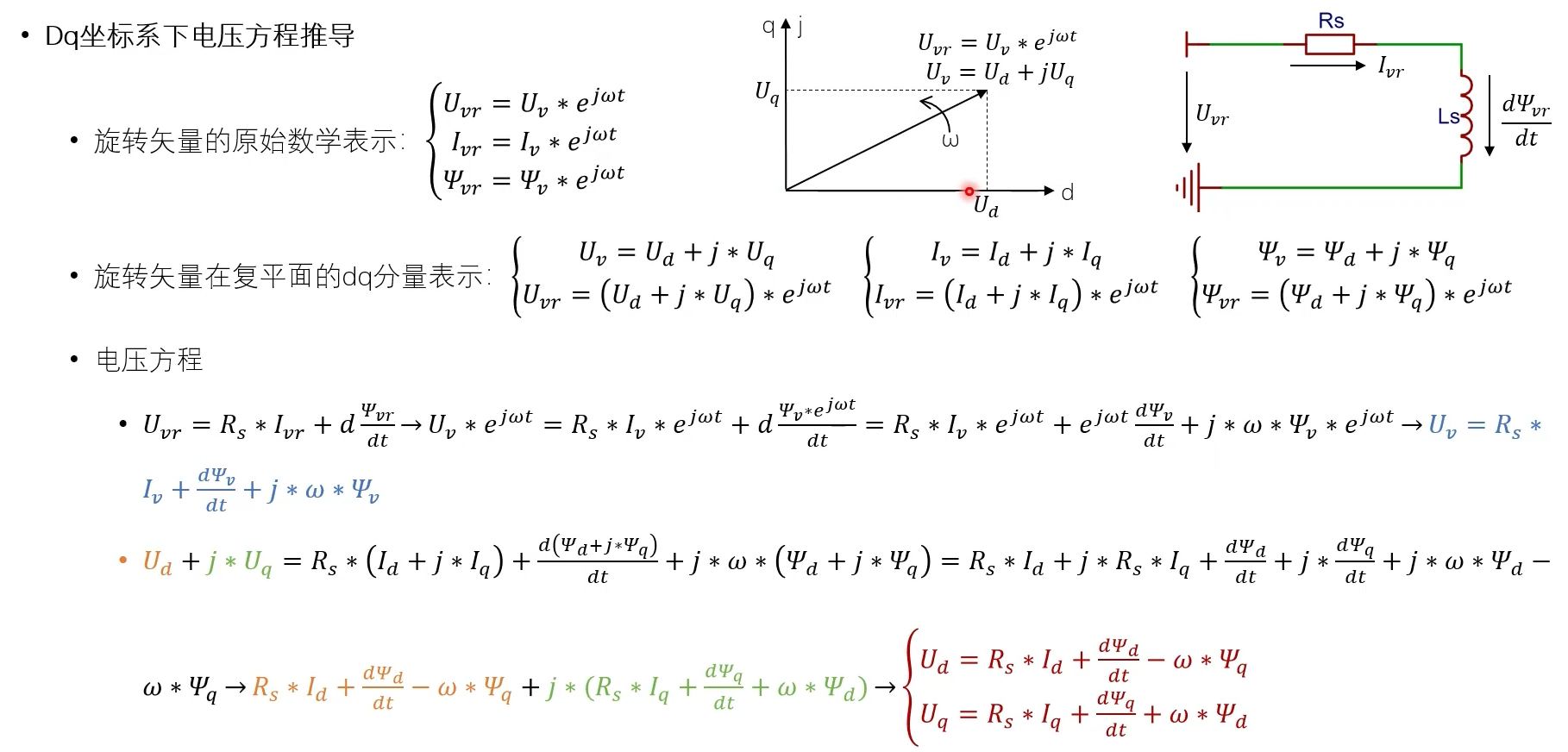
旋转的电压产生旋转的电流,旋转的电流产生旋转的定子磁场;旋转的定子磁场与转子磁场相互作用产生电磁转矩,进而驱动转子旋转;
原始公式分别是旋转的电压矢量、旋转的电流矢量、旋转的磁链矢量;
下标v代表这是一个矢量,r代表旋转,vr代表这是一个旋转的矢量;
Uv以角速度欧米伽进行旋转,Uv乘以e的一阶角速度欧米伽乘以时间t,就构成了Uvr;
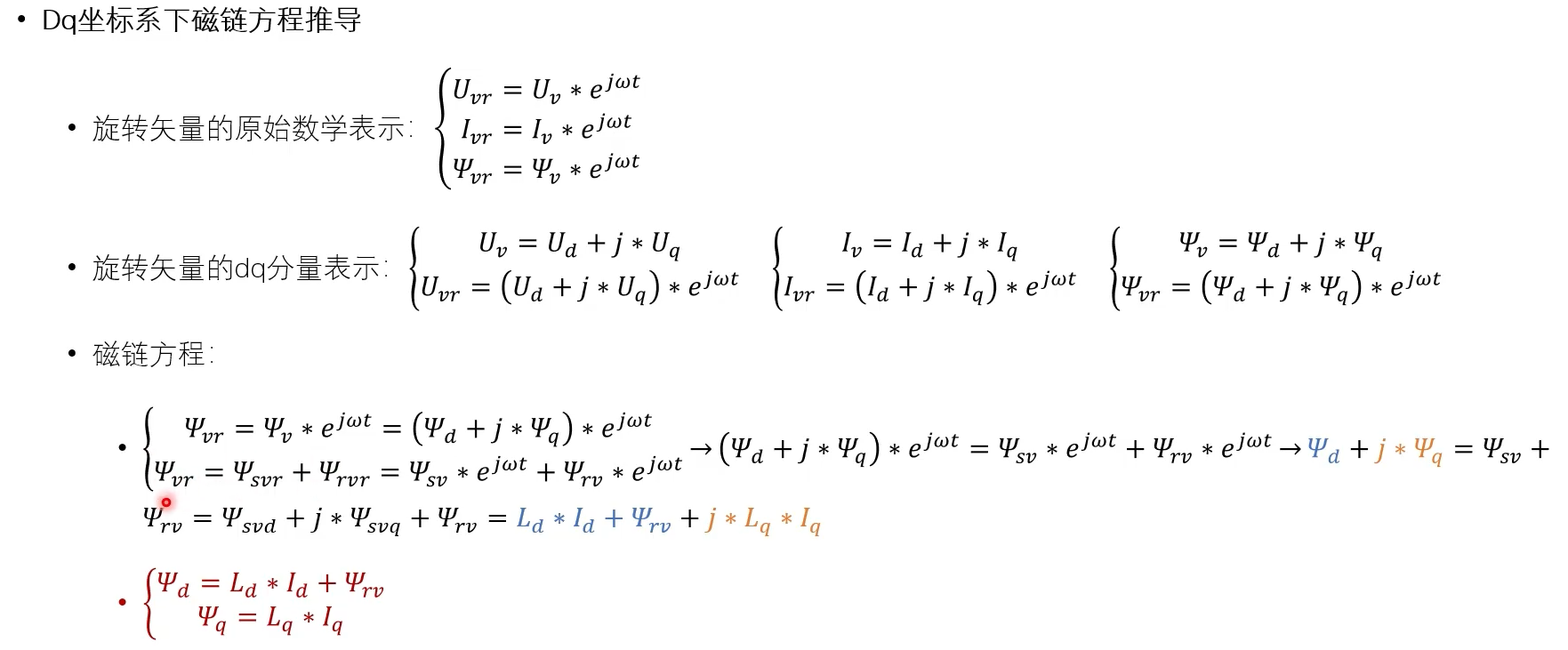
3.3.3磁链方程推导
ψ(psi)
ψvr实际上是合成的磁链矢量,等于定子磁链和转子磁链的叠加;
转子磁链和d轴重合,它在q轴上的分量是0,所以ψq等于q轴的电感乘以电流;
3.3.4受控对象推导结果
将上面推导的方程带进来,得到如下图所示
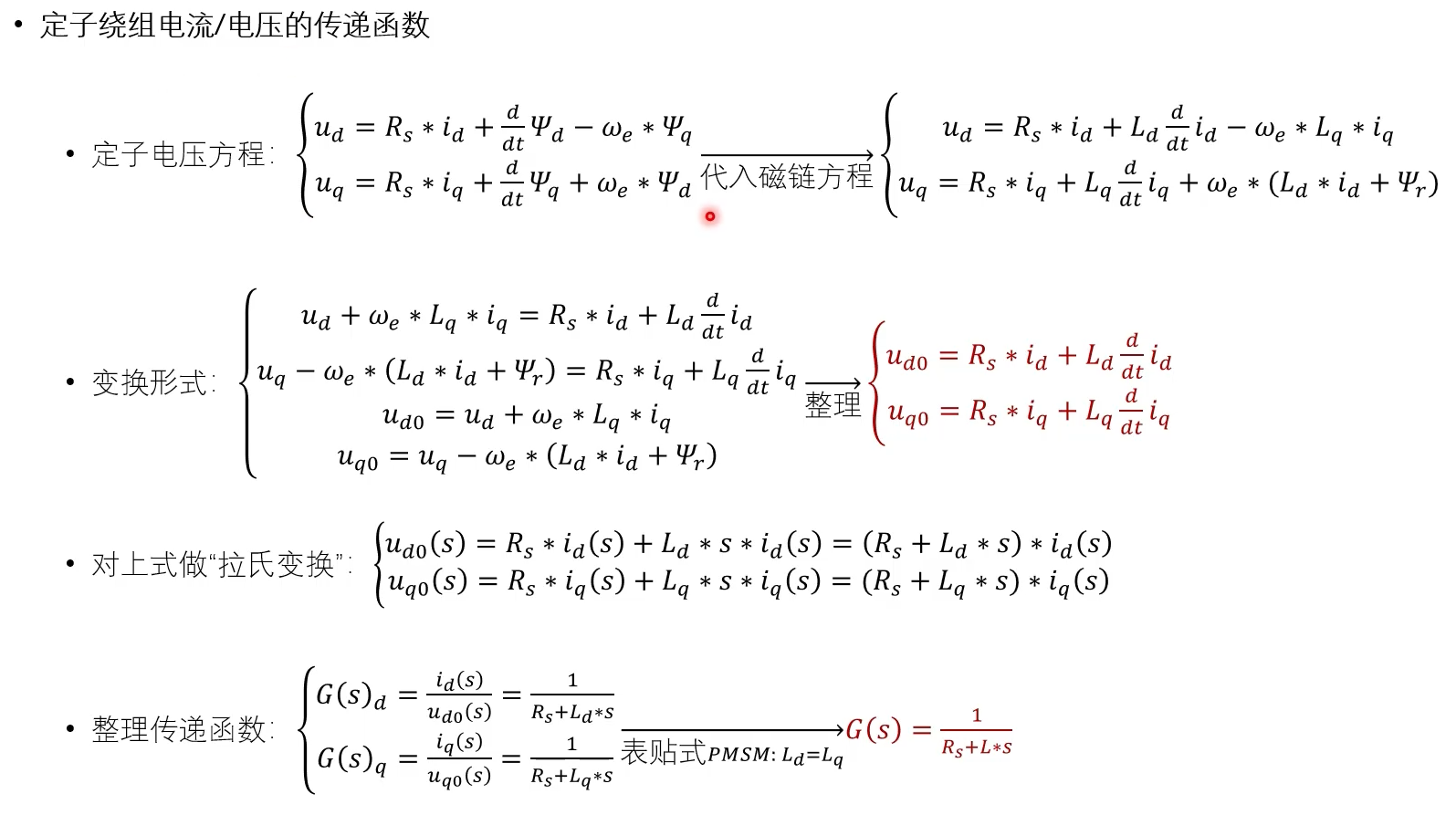
通过这里的公式推导,就可以得出PI控制器的输入为什么是电流,输出是电压;
3.3.5电流环控制
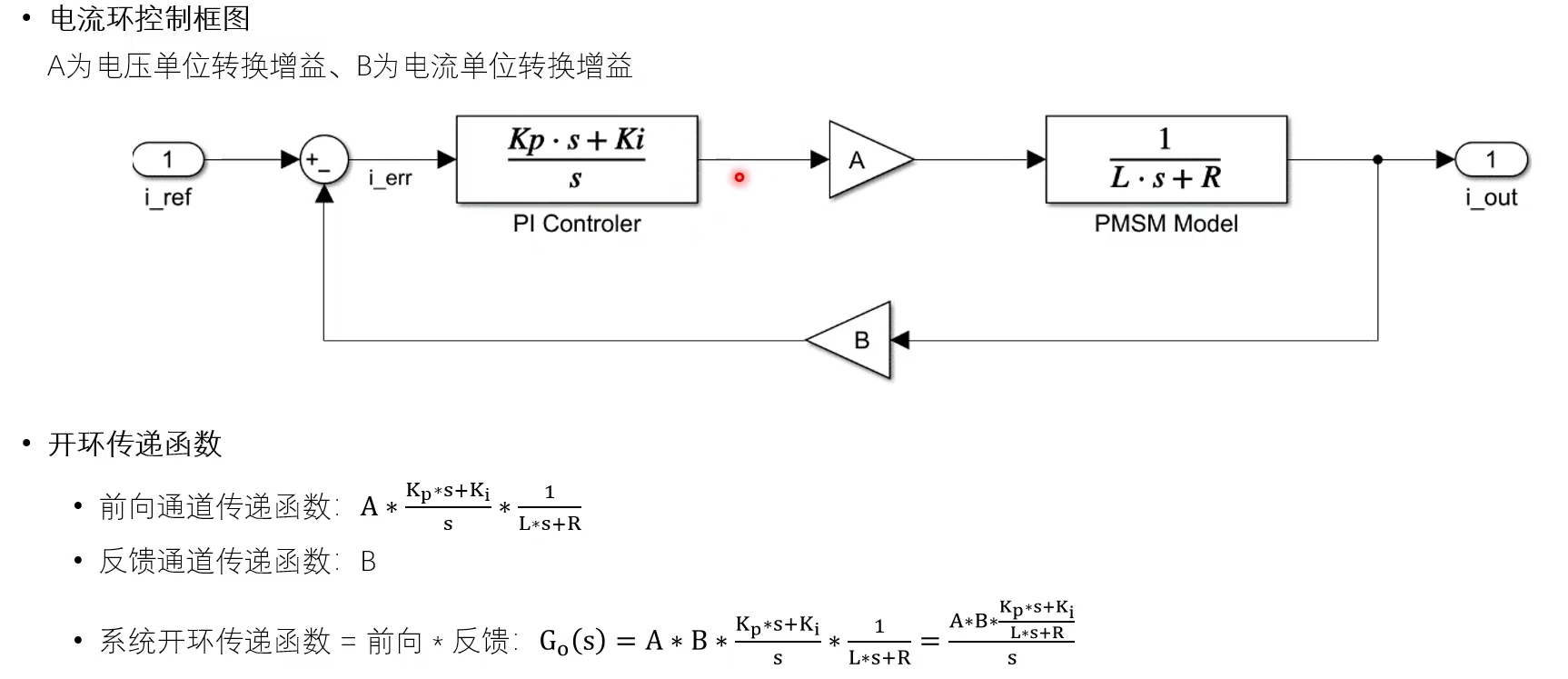
最终加载到被控对象上的是电压的原始单位伏特;被控对象模型输出的原始单位是安培;
推导系统开环传递函数
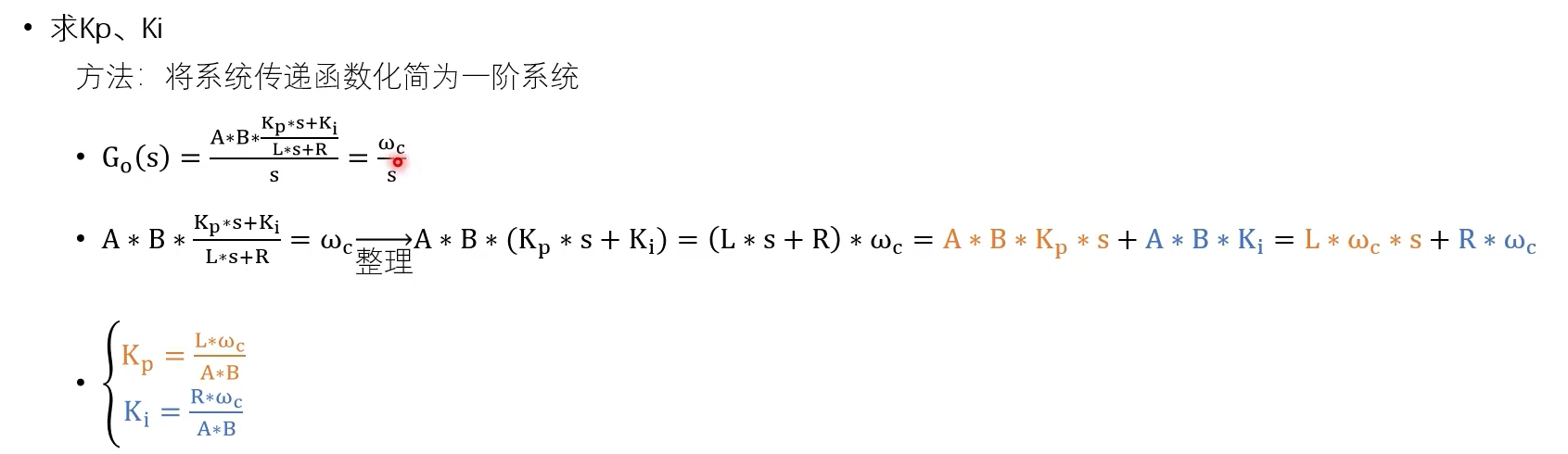
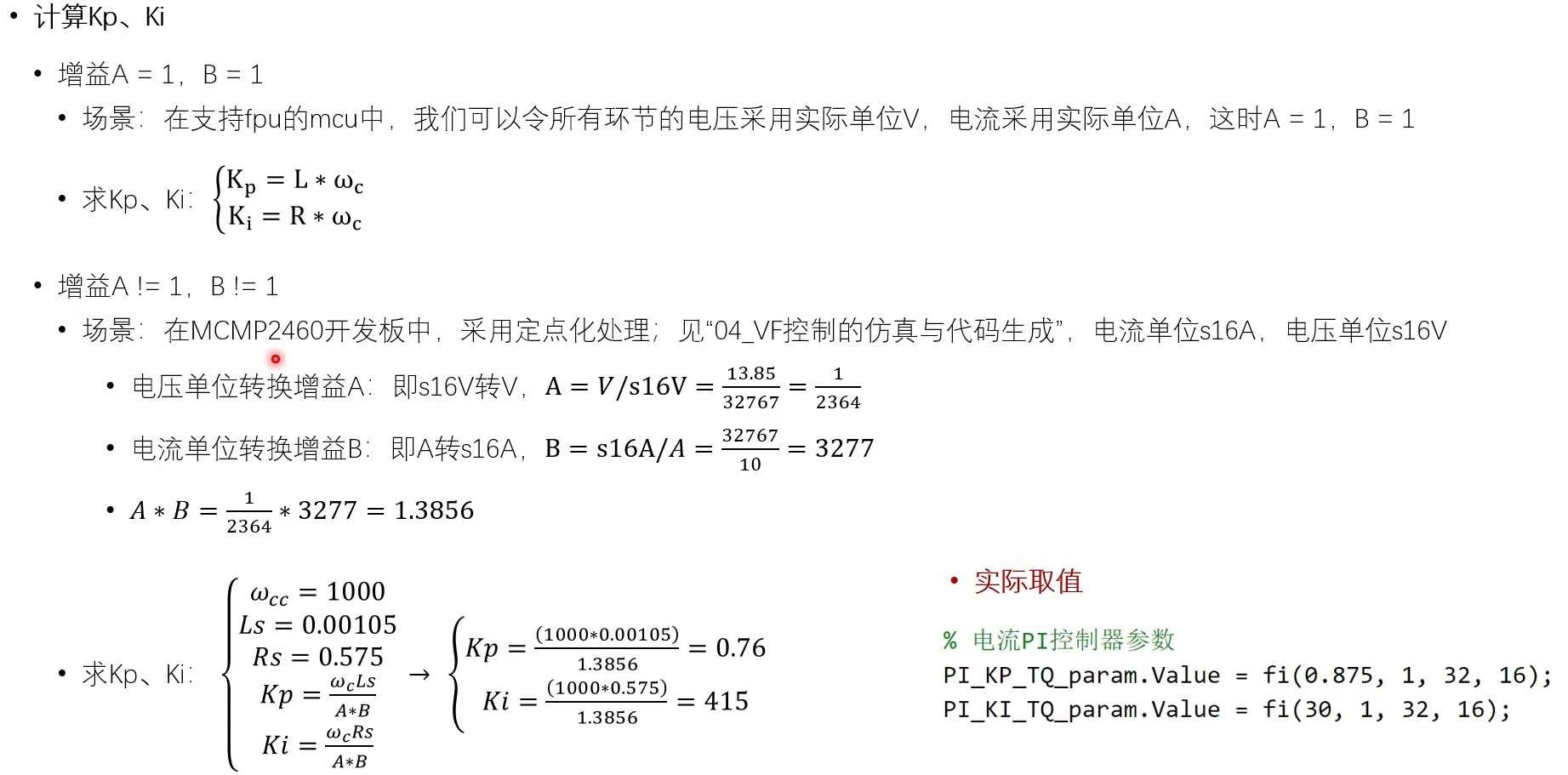
kp与电感成正相关,ki与电阻成正相关;
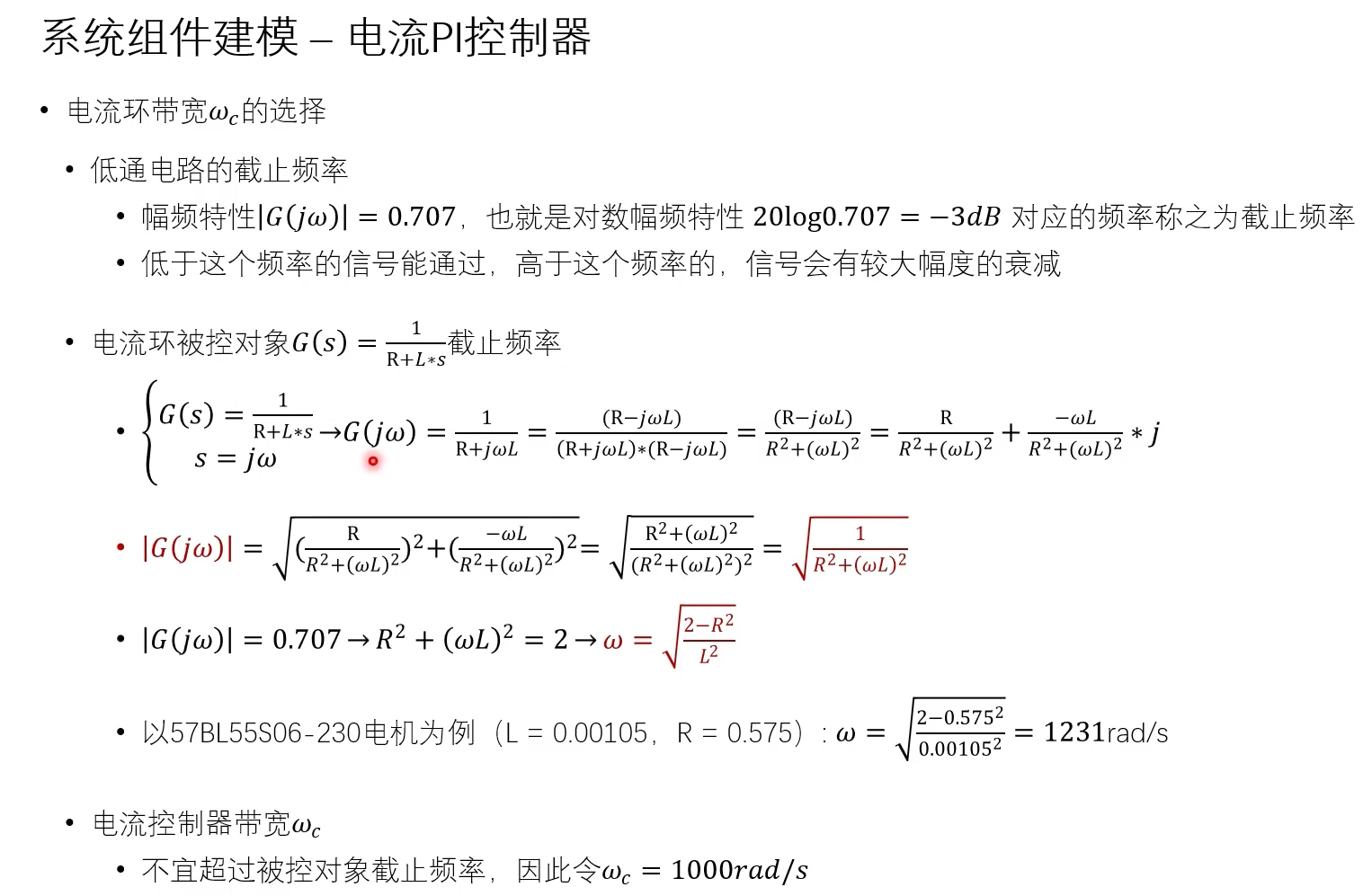
3.3.6电流环带宽
rpm = rad/s × (60 / (2π)) = rad/s × (30 / π) ≈ rad/s × 9.5493
3.3.7计算kp/ki