基于电鱼 AI 工控机的智慧工地视频智能分析方案——边缘端AI检测,实现无人值守下的实时安全预警
一、行业痛点
当前工地视频监控普遍存在以下问题:
- 📹 仅录像无智能分析:摄像头只负责记录,无法识别异常;
- 🕒 人工监控成本高:24小时值班费时费力;
- ⚠️ 异常事件发现滞后:事故往往被录像“记录”,却无人“发现”;
- 🌐 云端AI延迟高:视频上传云端推理,带宽占用大、延迟严重。
✅ 解决思路:
将 AI算法下沉至电鱼RK3588边缘工控机,
在摄像头前端完成实时识别与报警,
仅上报“结果数据”,极大降低网络压力并提高响应速度。
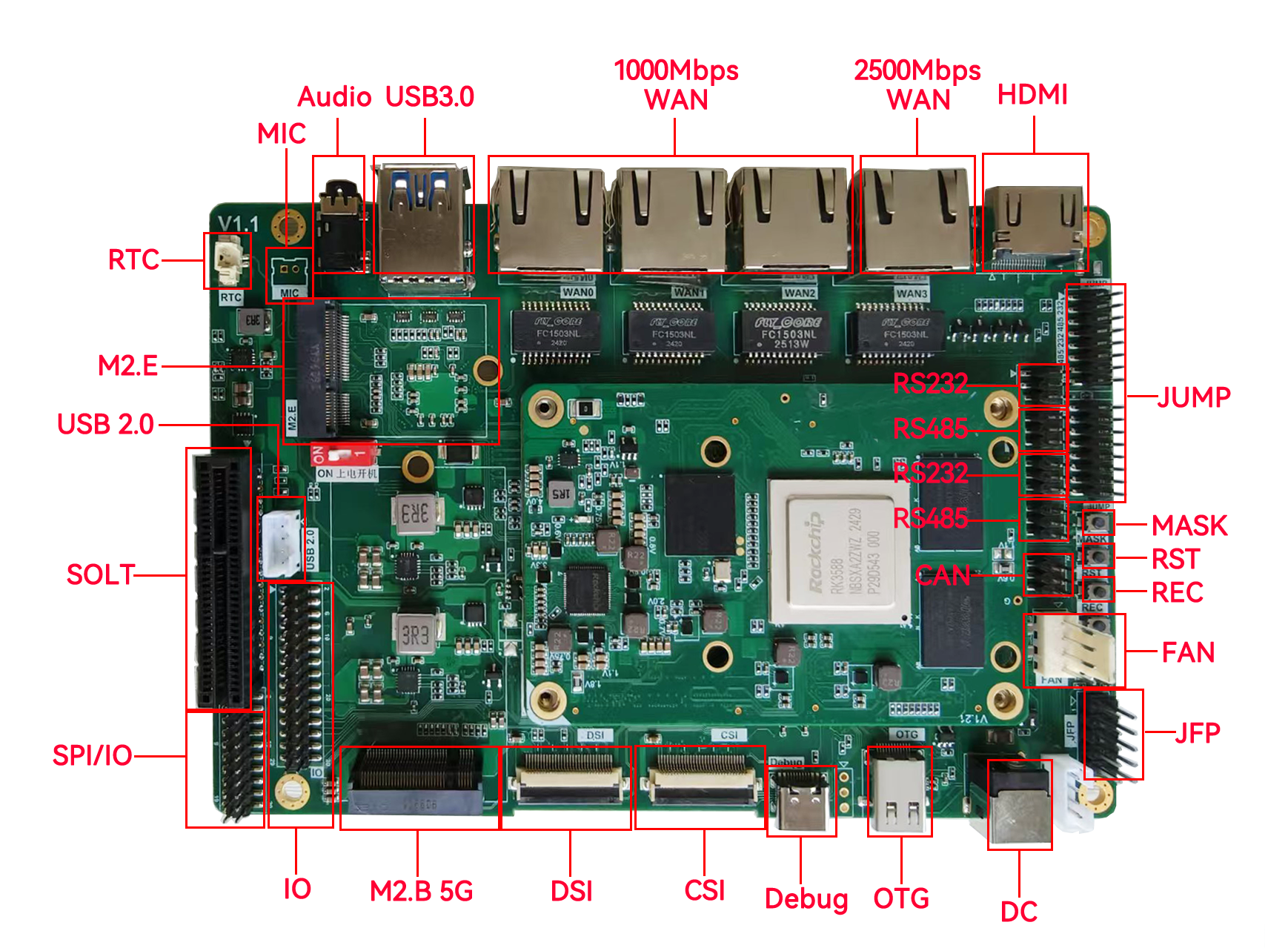
二、核心硬件平台
参数 | 电鱼 EFISH-RK3588 AI工控机 |
CPU | 8核 Cortex-A76 + A55 |
NPU算力 | 6 TOPS(AI推理专用) |
接口 | HDMI / USB / RS485 / Ethernet / GPIO |
系统 | Linux 5.10 / Ubuntu 20.04 |
支持算法 | 跌倒检测、闯入检测、区域入侵识别、人形检测 |
存储 | eMMC + SSD |
通信 | 以太网 / Wi-Fi / 4G / 5G |
工作温度 | -20℃ ~ +75℃ |
⚙️ RK3588内置高性能NPU(6TOPS),
可本地部署多路AI算法,实现“边缘即智能”的现场分析。
三、AI检测功能模块
模块 | 功能 | 技术说明 |
跌倒检测模块 | 识别人员姿态异常、长时间卧倒 | OpenPose / YOLOv8-Pose |
闯入检测模块 | 检测非授权人员进入工地区域 | YOLOv8 + 区域ROI定义 |
区域入侵报警 | 判断人员是否越界或进入危险区域 | 多边形区域划分 + 跟踪算法 |
视频预处理模块 | 降噪、帧同步、目标裁剪 | OpenCV + TensorRT加速 |
事件上报模块 | 上报报警类型与截图 | MQTT/HTTP接口 |
报警输出模块 | 声光报警 + 平台推送 | GPIO/继电器输出 |
四、AI算法示例
# 区域入侵检测示例(简化版)
def detect_intrusion(frame):objects = yolo_model.detect(frame)for obj in objects:if obj["type"] == "person" and is_in_roi(obj["bbox"], DANGER_ZONE):trigger_alarm("区域入侵", obj)upload_event("intrusion", obj)⚡ AI算法每秒可处理多帧图像(8~12FPS),
可同时监控多个摄像头画面,延迟低于300ms。
五、报警与联动机制
异常类型 | 触发条件 | 响应动作 |
人员跌倒 | 姿态角度异常且静止>5秒 | 声光报警 + 平台推送 |
区域入侵 | 人员进入危险区域 | 实时截图 + 语音警告 |
闯入检测 | 非授权时间检测到人形 | 消息上报 + 记录视频片段 |
⚙️ 系统支持 本地与云端双重报警,
即便断网,边缘端仍能完成事件判断与联动。
六、方案优势
✅ 本地AI识别,无需云端分析:减少延迟与带宽;
✅ 实时报警,毫秒级响应:事件立即触发处理;
✅ 多算法融合检测:跌倒、入侵、越界等统一识别;
✅ 容器化部署,灵活升级:算法模块可独立更新;
✅ 无人值守,自动运行:适合全天候施工现场;
✅ 可扩展:支持接入安全帽识别、吸烟检测等AI模型。
七、实施流程
1️⃣ 安装电鱼RK3588 AI工控机于工地监控主机位;
2️⃣ 接入摄像头视频流(RTSP或USB);
3️⃣ 部署AI容器镜像(Docker);
4️⃣ 配置检测区域与报警参数;
5️⃣ 连接云平台进行报警展示与日志统计;
整套系统可在1小时内完成部署,
并支持后续算法OTA升级。
八、典型应用场景
- 🏗️ 工地人员安全检测:跌倒、昏厥自动识别报警;
- 🚧 施工禁区闯入监控:智能判断越界入侵;
- 🌃 夜间入侵监控:红外摄像+AI识别;
- 🔧 设备区域安全联动:入侵即停机 / 声光告警。