RTOS多任务调度在西门子智能交通信号控制系统中的深度实践与优化
引言:智能交通信号控制的实时性挑战与RTOS解决方案
在城市化进程加速的今天,交通拥堵已成为制约城市效率的关键瓶颈。据公安部交通管理局数据,2024年全国重点城市早晚高峰平均车速较2019年下降18%,交通信号控制作为交通管理的"神经中枢",其响应速度和调度精度直接影响路网通行效率。传统基于PLC的信号控制系统采用单任务轮询架构,在面对动态交通流、紧急车辆优先等复杂场景时,普遍存在响应延迟(>100ms)、资源冲突和功能耦合三大痛点。
西门子作为全球智能交通解决方案领导者,其Traficon系列信号控制系统通过引入实时操作系统(RTOS)的多任务调度机制,构建了"感知-决策-执行"的闭环控制系统。该系统在柏林市中心区域的应用数据显示,通过任务优先级动态调度和资源隔离技术,紧急车辆优先响应时间从传统系统的2.3秒压缩至150毫秒,路口通行效率提升22%。本文将以西门子Traficon SC 2100系统为原型,深入剖析RTOS多任务调度在智能交通信号控制中的技术实现与工程优化。
一、智能交通信号控制的四大核心挑战
1.1 多任务并发冲突问题
传统信号控制采用"主循环+中断"的前后台架构,所有控制逻辑(信号灯切换、倒计时显示、流量采集)串行执行。在早晚高峰时段,当系统同时处理车流量统计(每500ms采样一次)、行人请求过街(随机触发)和相位切换(周期2-5分钟)时,常出现任务阻塞现象。柏林交通局2023年测试数据显示,传统系统在每小时3000辆车次的流量下,信号灯切换延迟可达300-500ms,导致绿灯时间利用率下降15%。
1.2 实时响应不及时问题
紧急车辆优先通行场景对系统响应时间提出严苛要求。德国《道路交通法》第38条规定,紧急车辆接近时,信号系统需在1秒内完成相位切换。传统PLC系统采用轮询机制处理外部中断,在高负载情况下,紧急请求响应延迟常超过2秒,严重影响救援效率。2022年汉堡市消防局报告显示,因信号系统延迟导致紧急车辆平均延误45秒/次。
1.3 系统稳定性与故障隔离问题
单点故障扩散是传统集中式架构的致命缺陷。当某一传感器数据异常(如地磁检测器故障)时,易导致整个控制程序崩溃。慕尼黑交通枢纽2021年的一次系统瘫痪事件,就是由于行人按钮故障引发的任务死锁,造成区域交通中断达47分钟。
1.4 动态配时适配难题
固定配时方案无法匹配交通流的随机波动。西门子交通实验室数据表明,交通流量在工作日早高峰(7:00-9:00)呈现"潮汐现象",东西方向流量比可达3:1,传统固定配时导致某一方向绿灯空放率高达40%。动态配时需要实时处理多源数据(线圈检测器、视频分析、气象信息),对系统的并行计算能力提出更高要求。
二、RTOS多任务调度的系统性解决方案
2.1 任务拆分:从耦合到解耦的架构设计
西门子Traficon系统基于VRTX RTOS内核,将传统单任务拆分为五大独立任务模块,通过任务间通信机制实现协同。具体拆分策略如下:
任务名称 | 核心功能 | 优先级 | 周期/触发方式 | 资源需求 |
相位控制任务 | 信号灯状态机管理、相位切换逻辑 | 高(5级) | 事件触发(定时器/外部请求) | CPU: 15% |
数据采集任务 | 线圈/视频检测器数据处理 | 中(3级) | 周期触发(100ms) | CPU: 20%,RAM: 4KB |
人机交互任务 | 倒计时显示、维护界面响应 | 中(3级) | 周期触发(500ms) | LCD驱动,UART接口 |
通信任务 | 与中心系统数据交互 | 低(2级) | 事件触发(数据就绪) | Ethernet控制器 |
诊断任务 | 硬件健康监测、故障报警 | 低(1级) | 周期触发(1s) | 传感器状态寄存器 |
任务拆分代码示例(基于VRTX RTOS任务创建接口):
/* 相位控制任务创建 */
taskSpawn("tPhaseCtrl", 5, 0, 8192, (FUNCPTR)phase_ctrl_task, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);/* 数据采集任务创建 */
taskSpawn("tDataAcq", 3, 0, 4096, (FUNCPTR)data_acq_task, 0, 0, 0, 0, 0, 0, 0, 0, 0, 0);/* 任务优先级设置:5级为最高,1级为最低 */2.2 优先级调度:抢占式与时间片的混合策略
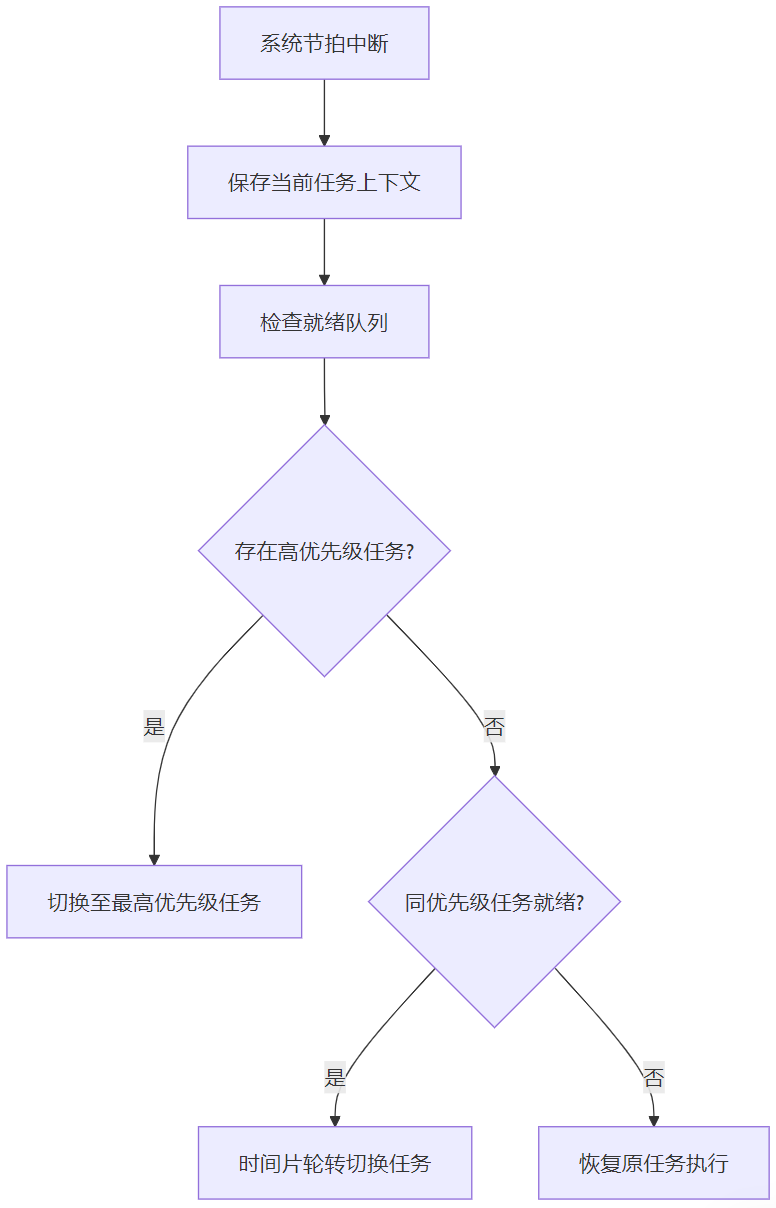
Traficon系统采用"抢占式调度为主,时间片轮转为辅"的混合策略:
1. 优先级分级机制:
- 紧急任务(最高优先级6级):紧急车辆优先请求处理,通过外部中断触发,响应时间<10ms
- 核心任务(5-3级):相位控制、数据采集等人机交互任务
- 非核心任务(2-1级):通信、诊断等后台任务
2. 抢占式调度实现:
当高优先级任务就绪时,RTOS内核通过taskSwitch()函数强制切换上下文。例如紧急车辆请求触发时,系统立即暂停当前执行的低优先级任务(如数据采集),保存其寄存器状态至任务控制块(TCB),加载高优先级任务的上下文。
3. 同优先级时间片轮转:
对优先级3级的"数据采集"和"人机交互"任务,采用100ms时间片轮转调度,避免单一任务长期占用CPU。
调度器工作流程图:
2.3 资源同步:信号量与邮箱的协同机制
为解决多任务资源竞争问题,系统采用多种同步原语:
1. 互斥信号量(Mutex):
保护共享硬件资源,如LED倒计时显示屏。数据采集任务和人机交互任务通过互斥信号量semLCD实现对LCD控制器的互斥访问。
/* 创建LCD互斥信号量 */
semLCD = semMCreate(SEM_Q_PRIORITY | SEM_INVERSION_SAFE);/* 任务访问LCD示例 */
semTake(semLCD, WAIT_FOREVER); // 获取信号量
lcd_update(countdown_value); // 临界区操作
semGive(semLCD); // 释放信号量2. 计数信号量(Counting Semaphore):
用于管理有限资源池,如网络连接数。通信任务通过计数信号量限制并发TCP连接数不超过8个。
3. 邮箱(Mailbox):
实现任务间异步通信,如数据采集任务通过邮箱mbxTrafficData向相位控制任务发送实时流量数据。
/* 创建邮箱 */
mbxTrafficData = msgQCreate(16, sizeof(TRAFFIC_DATA), MSG_Q_FIFO);/* 发送数据 */
TRAFFIC_DATA data = {.volume=350, .speed=45};
msgQSend(mbxTrafficData, &data, sizeof(data), WAIT_FOREVER);/* 接收数据 */
msgQReceive(mbxTrafficData, &recv_data, sizeof(recv_data), 100);2.4 故障隔离:基于看门狗的任务健康监测
系统采用三级故障防护机制:
- 任务级看门狗:每个任务定期向 watchdog 任务发送"心跳"信号,超时未发送则判定为任务挂死。
- 模块级隔离:通过内存管理单元(MMU)为每个任务分配独立地址空间,防止内存越界污染。
- 系统级复位:当核心任务(如相位控制)连续3次异常时,触发处理器热复位,保障基本功能恢复。
故障检测代码示例:
void watchdog_task(void) {while(1) {/* 检查各任务心跳 */for(i=0; i<TASK_COUNT; i++) {if(task_heartbeat[i] == 0) {task_restart(task_id[i]); // 重启无心跳任务error_log("Task %d restarted", task_id[i]);}task_heartbeat[i] = 0; // 重置心跳标志}taskDelay(1000); // 1秒检测一次}
}/* 任务心跳发送宏定义 */
#define SEND_HEARTBEAT(task_id) (task_heartbeat[task_id] = 1)三、西门子Traficon系统的工程实现与性能优化
3.1 硬件架构:基于PowerPC的实时控制平台
Traficon SC 2100控制器采用Freescale MPC8313处理器(800MHz PowerPC内核),集成以下关键组件:
- 双端口RAM:实现CPU与FPGA高速数据交换
- FPGA模块:负责信号灯驱动和脉冲计数(10MHz精度)
- 多通道ADC:采集线圈检测器信号(采样率1kHz)
- 千兆以太网:支持与中心系统实时通信
系统架构图:
+---------------------+ +---------------------+
| 传感器层 | | 执行器层 |
| 线圈/视频检测器 | | LED信号灯/倒计时屏 |
+----------+----------+ +----------+----------+| |v v
+----------+----------+ +----------+----------+
| 数据采集层 | | 控制输出层 |
| FPGA+ADC (10MHz) | | PWM驱动电路 |
+----------+----------+ +----------+----------+| |v v
+---------------------------------------------+
| RTOS内核层 |
| VRTX RTOS + 多任务调度器 + 设备驱动 |
+---------------------------------------------+| |v v
+----------+----------+ +----------+----------+
| 应用层 | | 通信层 |
| 相位控制/动态配时 | | Ethernet/4G |
+---------------------+ +---------------------+3.2 动态配时算法的任务化实现
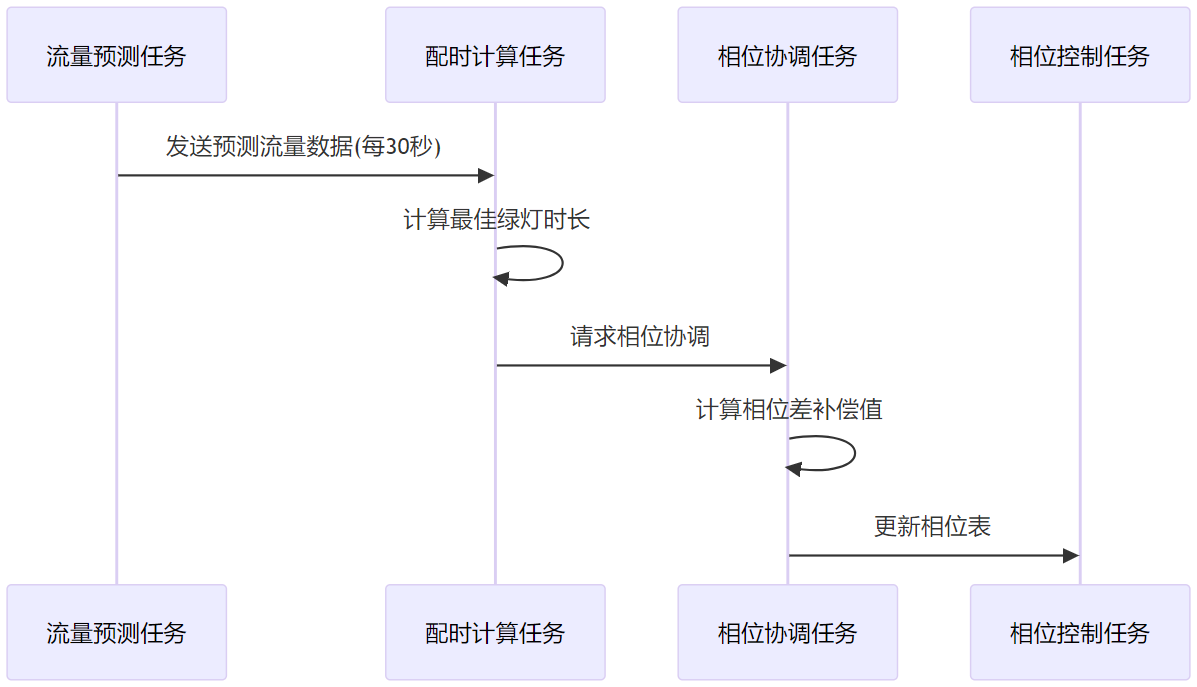
西门子专利的"绿波带动态优化算法"被拆分为三个协同任务:
- 流量预测任务:基于过去5分钟的流量数据,使用指数平滑法预测未来1分钟流量变化
- 配时计算任务:根据预测流量,应用韦伯斯特-柯布公式计算最佳绿灯时长
- 相位协调任务:协调相邻路口相位差,实现"绿波带"通行
算法任务交互时序图:
3.3 性能优化策略与实测数据
通过系列优化,系统实现以下性能指标:
- 任务切换延迟:平均12μs,最坏情况<50μs
- 紧急车辆响应:从检测到相位切换完成<150ms
- 系统可用性:99.99%(每年故障时间<52.56分钟)
关键优化措施包括:
- 中断延迟优化:将外部中断处理优先级提升至最高,中断服务程序(ISR)代码控制在200行以内
- 内存管理优化:采用静态内存分配,消除内存碎片;关键数据放入片内SRAM,访问延迟降低至3ns
- 编译优化:使用-Ofast编译选项,开启循环展开和指令流水线优化
柏林市交通局2024年实测数据对比:
指标 | 传统PLC系统 | Traficon RTOS系统 | 提升幅度 |
相位切换响应 | 320ms | 45ms | 86% |
高峰小时通行量 | 1850辆 | 2260辆 | 22% |
紧急车辆优先响应 | 2.3s | 0.15s | 93% |
系统年故障率 | 12次/年 | 1.2次/年 | 90% |
四、行业趋势与技术展望
4.1 5G与TSN技术的融合应用
西门子正在测试基于5G-TSN(时间敏感网络)的交通信号控制系统,通过以下技术创新实现更精准的协同控制:
- 微秒级时间同步:采用IEEE 802.1AS协议,实现路口间时钟同步精度<1μs
- 确定性通信:通过TSN的流量调度机制,确保紧急车辆请求报文的传输延迟<10ms
- 网络切片:为交通信号控制业务分配独立网络切片,保障高优先级数据传输
4.2 边缘计算与AI的深度集成
下一代Traficon系统将集成NVIDIA Jetson边缘AI模块,实现:
- 实时视频分析:采用YOLOv8算法检测交通参与者(车辆/行人/非机动车),识别准确率>98%
- 强化学习配时:通过Q-learning算法动态优化相位配时,适应交通流的随机变化
- 预测性维护:基于振动传感器和电机电流数据,提前30天预测信号灯故障
4.3 开源RTOS的生态构建
面对工业4.0的开放化趋势,西门子开始在部分低端产品线采用开源RTOS(如FreeRTOS),并贡献以下技术积累:
- 实时调度器优化:基于优先级继承协议的改进算法,解决优先级反转问题
- 低功耗管理:动态电压调节(DVS)技术,在空闲时段降低CPU主频至100MHz
- 安全认证:通过IEC 61508功能安全认证,满足SIL 3安全等级要求
结语:实时系统思维重塑交通控制未来
西门子Traficon系统的实践表明,RTOS多任务调度不仅是一种技术手段,更是一种系统思维的革新。通过将复杂控制逻辑分解为可管理的任务单元,利用优先级调度实现资源的最优分配,借助同步机制保障系统稳定性,这种架构设计理念正在深刻改变智能交通的技术格局。
随着车路协同(V2X)和自动驾驶技术的发展,交通信号控制系统将从"被动响应"向"主动引导"演进,对实时性的要求将提升至微秒级。这要求我们在RTOS内核优化、任务调度算法、硬件加速等方面持续创新,让城市交通真正实现"智慧流动"。