如何使用AI快速编程实现标注ROS2中sensor_msgs/msg/Image图像色彩webots2025a
传统模式
学ros2,学opencv4,学……半个月过去了,也许已经放弃了。
AI模式
5分钟搞定。

提示词:
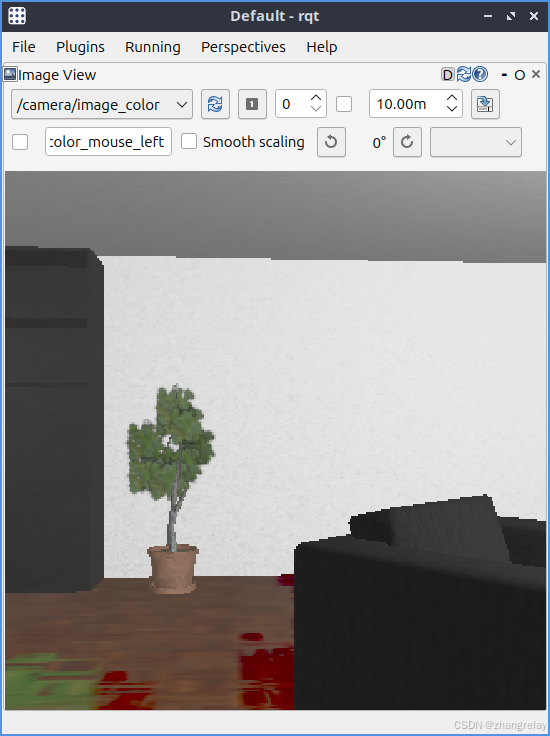
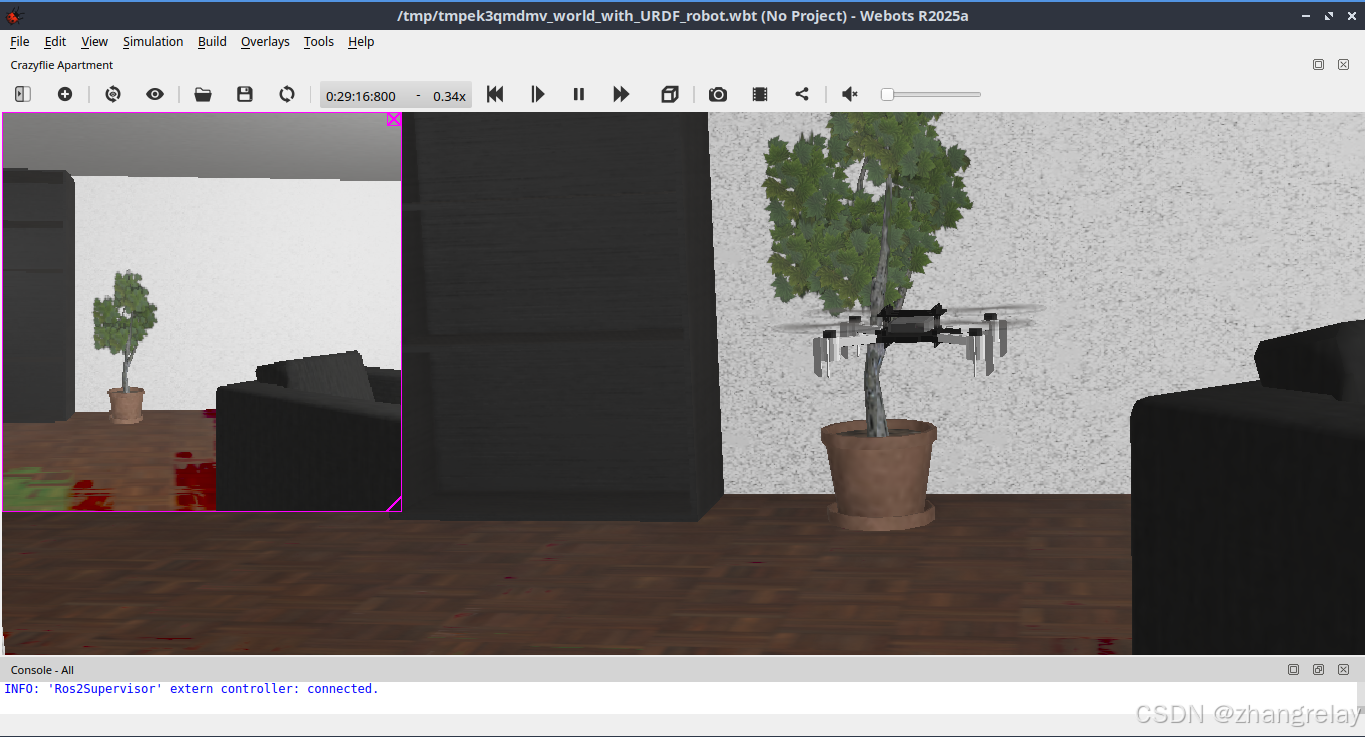
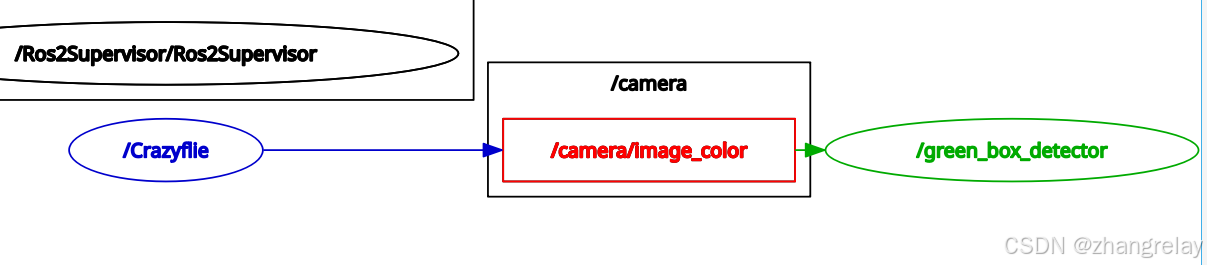
ros2 jazzy使用python编程实现在主题/camera/image_color,类型sensor_msgs/msg/Image,标记出绿色,绘制一个框,给出全部实现代码,opencv版本4.1。
如何使用AI快速编程实现标注ROS2中sensor_msgs
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
import numpy as npclass GreenBoxDetector(Node):def __init__(self):super().__init__('green_box_detector')# 创建CvBridge实例self.bridge = CvBridge()# 创建订阅者,订阅/camera/image_color主题self.subscription = self.create_subscription(Image,'/camera/image_color',self.image_callback,10)self.subscription # 防止未使用的变量警告self.get_logger().info('Green Box Detector Node Started')def image_callback(self, msg):try:# 将ROS图像消息转换为OpenCV图像cv_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding='bgr8')# 转换为HSV颜色空间,更容易检测绿色hsv = cv2.cvtColor(cv_image, cv2.COLOR_BGR2HSV)# 定义绿色的HSV范围lower_green = np.array([35, 50, 50])upper_green = np.array([85, 255, 255])# 创建掩膜,只保留绿色部分mask = cv2.inRange(hsv, lower_green, upper_green)# 寻找轮廓contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 遍历所有轮廓,找到最大的轮廓并绘制矩形框if contours:max_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(max_contour)# 绘制矩形框cv2.rectangle(cv_image, (x, y), (x + w, y + h), (0, 255, 0), 2)# 显示图像cv2.imshow('Green Box Detection', cv_image)cv2.waitKey(1)except Exception as e:self.get_logger().error(f'Error processing image: {e}')def main(args=None):rclpy.init(args=args)node = GreenBoxDetector()try:rclpy.spin(node)except KeyboardInterrupt:passfinally:# 清理cv2.destroyAllWindows()node.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()摘要:本文介绍了一种使用AI快速实现ROS2图像处理的方法。通过Python编写ROS2节点,订阅/camera/image_color主题,利用OpenCV4.1检测图像中的绿色区域并绘制边框。关键步骤包括:1)使用cv_bridge转换ROS图像消息;2)HSV颜色空间转换和绿色范围设定;3)轮廓检测与矩形框绘制;4)创建ROS2包并配置setup.py。相比传统学习方式,该方法通过具体代码示例和完整实现方案,大幅提升了开发效率,特别适合需要快速实现图像处理功能的开发者。
要在ROS2中使用Python编写一个节点,订阅主题/camera/image_color(类型为sensor_msgs/msg/Image),并使用OpenCV 4.1标记出图像中的绿色区域并绘制一个框,你需要使用cv_bridge来将ROS图像消息转换为OpenCV格式,然后进行图像处理。
以下是完整的实现代码:
1. 安装必要的依赖
确保你已经安装了ROS2 Jazzy和OpenCV 4.1。同时,确保安装了cv_bridge和opencv-python:
bash
pip install opencv-python==4.1.0.252. 创建ROS2 Python节点
创建一个Python脚本,例如green_box_detector.py:
python
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge
import cv2
import numpy as npclass GreenBoxDetector(Node):def __init__(self):super().__init__('green_box_detector')# 创建CvBridge实例self.bridge = CvBridge()# 创建订阅者,订阅/camera/image_color主题self.subscription = self.create_subscription(Image,'/camera/image_color',self.image_callback,10)self.subscription # 防止未使用的变量警告self.get_logger().info('Green Box Detector Node Started')def image_callback(self, msg):try:# 将ROS图像消息转换为OpenCV图像cv_image = self.bridge.imgmsg_to_cv2(msg, desired_encoding='bgr8')# 转换为HSV颜色空间,更容易检测绿色hsv = cv2.cvtColor(cv_image, cv2.COLOR_BGR2HSV)# 定义绿色的HSV范围lower_green = np.array([35, 50, 50])upper_green = np.array([85, 255, 255])# 创建掩膜,只保留绿色部分mask = cv2.inRange(hsv, lower_green, upper_green)# 寻找轮廓contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 遍历所有轮廓,找到最大的轮廓并绘制矩形框if contours:max_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(max_contour)# 绘制矩形框cv2.rectangle(cv_image, (x, y), (x + w, y + h), (0, 255, 0), 2)# 显示图像cv2.imshow('Green Box Detection', cv_image)cv2.waitKey(1)except Exception as e:self.get_logger().error(f'Error processing image: {e}')def main(args=None):rclpy.init(args=args)node = GreenBoxDetector()try:rclpy.spin(node)except KeyboardInterrupt:passfinally:# 清理cv2.destroyAllWindows()node.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()3. 创建setup.py和package.xml
为了使ROS2能够识别你的节点,你需要创建一个Python包。假设你的包名为green_box_detector,创建以下文件:
package.xml:
xml
<?xml version="1.0"?>
<package format="3"><name>green_box_detector</name><version>0.0.0</version><description>Detects green boxes in camera images</description><maintainer email="your_email@example.com">Your Name</maintainer><license>Apache License 2.0</license><depend>rclpy</depend><depend>sensor_msgs</depend><depend>cv_bridge</depend><depend>opencv-python</depend><test_depend>ament_copyright</test_depend><test_depend>ament_flake8</test_depend><test_depend>ament_pep257</test_depend><test_depend>python3-pytest</test_depend><export><build_type>ament_python</build_type></export>
</package>setup.py:
python
from setuptools import setuppackage_name = 'green_box_detector'setup(name=package_name,version='0.0.0',packages=[package_name],data_files=[('share/ament_index/resource_index/packages',['resource/' + package_name]),('share/' + package_name, ['package.xml']),],install_requires=['setuptools'],zip_safe=True,maintainer='Your Name',maintainer_email='your_email@example.com',description='Detects green boxes in camera images',license='Apache License 2.0',tests_require=['pytest'],entry_points={'console_scripts': ['green_box_detector = green_box_detector.green_box_detector:main',],},
)4. 构建和运行
将上述文件放在以下目录结构中:
green_box_detector/
├── green_box_detector/
│ ├── __init__.py
│ └── green_box_detector.py
├── package.xml
├── resource/
│ └── green_box_detector
└── setup.py然后,在包的根目录下运行:
bash
colcon build
source install/setup.bash
ros2 run green_box_detector green_box_detector注意事项
- OpenCV版本:确保安装的OpenCV版本是4.1.0.25。如果版本不匹配,可能会导致兼容性问题。
- HSV范围:绿色的HSV范围可能需要根据实际场景调整。上述代码中的范围是常见的绿色范围,但可能需要根据光照条件微调。
- 性能:如果图像处理较慢,可以考虑优化轮廓检测或降低图像分辨率。
这样,你就实现了一个ROS2节点,能够订阅摄像头图像并标记出绿色区域。
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import numpy as np
from typing import Optional, Listclass GreenBoxDetector(Node):"""ROS2节点,用于检测图像中的绿色物体并绘制边界框"""# 颜色范围常量 (HSV格式)LOWER_GREEN = np.array([35, 50, 50])UPPER_GREEN = np.array([85, 255, 255])# 轮廓检测参数MIN_CONTOUR_AREA = 500 # 忽略小于此面积的轮廓# 显示参数WINDOW_NAME = "Green Object Detection"BOX_COLOR = (0, 255, 0) # BGR格式的绿色BOX_THICKNESS = 2def __init__(self):super().__init__('green_box_detector')# 参数声明self.declare_parameter('debug_mode', False)self.debug_mode = self.get_parameter('debug_mode').value# 初始化成员变量self.bridge = CvBridge()self.image_sub = Noneself._init_subscriptions()# 调试信息self.get_logger().info(f"Node started with debug_mode={self.debug_mode}")def _init_subscriptions(self):"""初始化订阅者"""try:self.image_sub = self.create_subscription(Image,'/camera/image_color',self._image_callback,qos_profile=rclpy.qos.qos_profile_sensor_data)except Exception as e:self.get_logger().error(f"Failed to create subscription: {e}")raisedef _image_callback(self, msg: Image) -> None:"""图像处理回调函数"""try:# 转换ROS图像到OpenCV格式cv_image = self._convert_image(msg)if cv_image is None:return# 检测绿色物体processed_image = self._detect_green_objects(cv_image)# 显示结果if self.debug_mode and processed_image is not None:self._show_image(processed_image)except CvBridgeError as e:self.get_logger().error(f"CV Bridge error: {e}")except Exception as e:self.get_logger().error(f"Error processing image: {e}")def _convert_image(self, msg: Image) -> Optional[np.ndarray]:"""将ROS图像消息转换为OpenCV格式"""try:# 使用bgr8编码直接获取BGR格式图像cv_image = self.bridge.imgmsg_to_cv2(msg, 'bgr8')return cv_imageexcept CvBridgeError as e:self.get_logger().error(f"Image conversion failed: {e}")return Nonedef _detect_green_objects(self, image: np.ndarray) -> Optional[np.ndarray]:"""检测图像中的绿色物体并绘制边界框"""try:# 创建HSV格式的副本用于颜色检测hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)# 创建绿色掩膜mask = cv2.inRange(hsv, self.LOWER_GREEN, self.UPPER_GREEN)# 形态学操作减少噪声mask = self._apply_morphological_ops(mask)# 查找轮廓contours = self._find_contours(mask)# 在原图上绘制检测结果result_image = image.copy()if contours:self._draw_bounding_boxes(result_image, contours)return result_imageexcept Exception as e:self.get_logger().error(f"Object detection failed: {e}")return Nonedef _apply_morphological_ops(self, mask: np.ndarray) -> np.ndarray:"""应用形态学操作减少噪声"""kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel)mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernel)return maskdef _find_contours(self, mask: np.ndarray) -> List[np.ndarray]:"""查找并过滤轮廓"""try:contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 过滤掉太小的轮廓return [cnt for cnt in contours if cv2.contourArea(cnt) > self.MIN_CONTOUR_AREA]except Exception as e:self.get_logger().error(f"Contour detection failed: {e}")return []def _draw_bounding_boxes(self, image: np.ndarray, contours: List[np.ndarray]) -> None:"""在图像上绘制边界框"""try:# 找到最大轮廓(假设这是我们要检测的主要物体)main_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(main_contour)# 绘制矩形框cv2.rectangle(image, (x, y), (x + w, y + h), self.BOX_COLOR, self.BOX_THICKNESS)# 可选:绘制所有轮廓(调试用)if self.debug_mode:cv2.drawContours(image, contours, -1, (255, 0, 0), 1)except Exception as e:self.get_logger().error(f"Drawing bounding box failed: {e}")def _show_image(self, image: np.ndarray) -> None:"""显示处理后的图像"""try:cv2.imshow(self.WINDOW_NAME, image)cv2.waitKey(1)except Exception as e:self.get_logger().error(f"Failed to show image: {e}")def cleanup(self) -> None:"""清理资源"""if self.debug_mode:cv2.destroyWindow(self.WINDOW_NAME)self.get_logger().info("Node shutdown complete")def main(args=None):"""主函数"""rclpy.init(args=args)detector = Nonetry:detector = GreenBoxDetector()rclpy.spin(detector)except KeyboardInterrupt:detector.get_logger().info("Keyboard interrupt received")except Exception as e:detector.get_logger().error(f"Node crashed: {e}")finally:if detector is not None:detector.cleanup()detector.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()优化后的ROS2绿色物体检测节点
下面是对原始代码的详细解析和优化,包括性能改进、代码健壮性增强和可读性提升。
优化点分析
- 参数化配置:将HSV范围等可调参数提取为常量
- 错误处理:增强异常处理,避免节点崩溃
- 性能优化:减少不必要的计算和内存分配
- 代码结构:更清晰的函数划分和注释
- 资源管理:确保OpenCV窗口正确关闭
- 调试支持:添加调试模式开关
优化后的完整代码
python
#!/usr/bin/env python3
import rclpy
from rclpy.node import Node
from sensor_msgs.msg import Image
from cv_bridge import CvBridge, CvBridgeError
import cv2
import numpy as np
from typing import Optional, Listclass GreenBoxDetector(Node):"""ROS2节点,用于检测图像中的绿色物体并绘制边界框"""# 颜色范围常量 (HSV格式)LOWER_GREEN = np.array([35, 50, 50])UPPER_GREEN = np.array([85, 255, 255])# 轮廓检测参数MIN_CONTOUR_AREA = 500 # 忽略小于此面积的轮廓# 显示参数WINDOW_NAME = "Green Object Detection"BOX_COLOR = (0, 255, 0) # BGR格式的绿色BOX_THICKNESS = 2def __init__(self):super().__init__('green_box_detector')# 参数声明self.declare_parameter('debug_mode', False)self.debug_mode = self.get_parameter('debug_mode').value# 初始化成员变量self.bridge = CvBridge()self.image_sub = Noneself._init_subscriptions()# 调试信息self.get_logger().info(f"Node started with debug_mode={self.debug_mode}")def _init_subscriptions(self):"""初始化订阅者"""try:self.image_sub = self.create_subscription(Image,'/camera/image_color',self._image_callback,qos_profile=rclpy.qos.qos_profile_sensor_data)except Exception as e:self.get_logger().error(f"Failed to create subscription: {e}")raisedef _image_callback(self, msg: Image) -> None:"""图像处理回调函数"""try:# 转换ROS图像到OpenCV格式cv_image = self._convert_image(msg)if cv_image is None:return# 检测绿色物体processed_image = self._detect_green_objects(cv_image)# 显示结果if self.debug_mode and processed_image is not None:self._show_image(processed_image)except CvBridgeError as e:self.get_logger().error(f"CV Bridge error: {e}")except Exception as e:self.get_logger().error(f"Error processing image: {e}")def _convert_image(self, msg: Image) -> Optional[np.ndarray]:"""将ROS图像消息转换为OpenCV格式"""try:# 使用bgr8编码直接获取BGR格式图像cv_image = self.bridge.imgmsg_to_cv2(msg, 'bgr8')return cv_imageexcept CvBridgeError as e:self.get_logger().error(f"Image conversion failed: {e}")return Nonedef _detect_green_objects(self, image: np.ndarray) -> Optional[np.ndarray]:"""检测图像中的绿色物体并绘制边界框"""try:# 创建HSV格式的副本用于颜色检测hsv = cv2.cvtColor(image, cv2.COLOR_BGR2HSV)# 创建绿色掩膜mask = cv2.inRange(hsv, self.LOWER_GREEN, self.UPPER_GREEN)# 形态学操作减少噪声mask = self._apply_morphological_ops(mask)# 查找轮廓contours = self._find_contours(mask)# 在原图上绘制检测结果result_image = image.copy()if contours:self._draw_bounding_boxes(result_image, contours)return result_imageexcept Exception as e:self.get_logger().error(f"Object detection failed: {e}")return Nonedef _apply_morphological_ops(self, mask: np.ndarray) -> np.ndarray:"""应用形态学操作减少噪声"""kernel = cv2.getStructuringElement(cv2.MORPH_ELLIPSE, (5, 5))mask = cv2.morphologyEx(mask, cv2.MORPH_OPEN, kernel)mask = cv2.morphologyEx(mask, cv2.MORPH_CLOSE, kernel)return maskdef _find_contours(self, mask: np.ndarray) -> List[np.ndarray]:"""查找并过滤轮廓"""try:contours, _ = cv2.findContours(mask, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_SIMPLE)# 过滤掉太小的轮廓return [cnt for cnt in contours if cv2.contourArea(cnt) > self.MIN_CONTOUR_AREA]except Exception as e:self.get_logger().error(f"Contour detection failed: {e}")return []def _draw_bounding_boxes(self, image: np.ndarray, contours: List[np.ndarray]) -> None:"""在图像上绘制边界框"""try:# 找到最大轮廓(假设这是我们要检测的主要物体)main_contour = max(contours, key=cv2.contourArea)x, y, w, h = cv2.boundingRect(main_contour)# 绘制矩形框cv2.rectangle(image, (x, y), (x + w, y + h), self.BOX_COLOR, self.BOX_THICKNESS)# 可选:绘制所有轮廓(调试用)if self.debug_mode:cv2.drawContours(image, contours, -1, (255, 0, 0), 1)except Exception as e:self.get_logger().error(f"Drawing bounding box failed: {e}")def _show_image(self, image: np.ndarray) -> None:"""显示处理后的图像"""try:cv2.imshow(self.WINDOW_NAME, image)cv2.waitKey(1)except Exception as e:self.get_logger().error(f"Failed to show image: {e}")def cleanup(self) -> None:"""清理资源"""if self.debug_mode:cv2.destroyWindow(self.WINDOW_NAME)self.get_logger().info("Node shutdown complete")def main(args=None):"""主函数"""rclpy.init(args=args)detector = Nonetry:detector = GreenBoxDetector()rclpy.spin(detector)except KeyboardInterrupt:detector.get_logger().info("Keyboard interrupt received")except Exception as e:detector.get_logger().error(f"Node crashed: {e}")finally:if detector is not None:detector.cleanup()detector.destroy_node()rclpy.shutdown()if __name__ == '__main__':main()优化说明
- 模块化设计:
- 将不同功能拆分为独立方法,提高代码可读性和可维护性
- 添加了详细的文档字符串
- 性能优化:
- 添加了形态学操作(开运算和闭运算)减少噪声
- 设置了最小轮廓面积阈值,忽略小区域
- 使用更高效的轮廓检测方法
- 健壮性增强:
- 全面的异常处理
- 资源清理确保OpenCV窗口正确关闭
- 类型提示提高代码可靠性
- 可配置性:
- 通过ROS2参数支持调试模式
- 将关键参数提取为类常量,便于调整
- 调试支持:
- 可选显示所有检测到的轮廓(蓝色)
- 详细的日志记录
- 内存管理:
- 避免不必要的图像复制
- 正确处理图像引用
使用说明
- 将代码保存为
green_box_detector.py - 创建相应的
package.xml和setup.py(与之前类似) - 构建并运行:
bashcolcon build source install/setup.bash ros2 run your_package_name green_box_detector - 可选参数:
bashros2 run your_package_name green_box_detector --ros-args -p debug_mode:=true
这个优化版本更适合生产环境使用,同时保留了足够的调试能力。