从协议规范和使用场景探讨为什么SmartMediaKit没有支持DASH
1. 引子:问题定义与边界
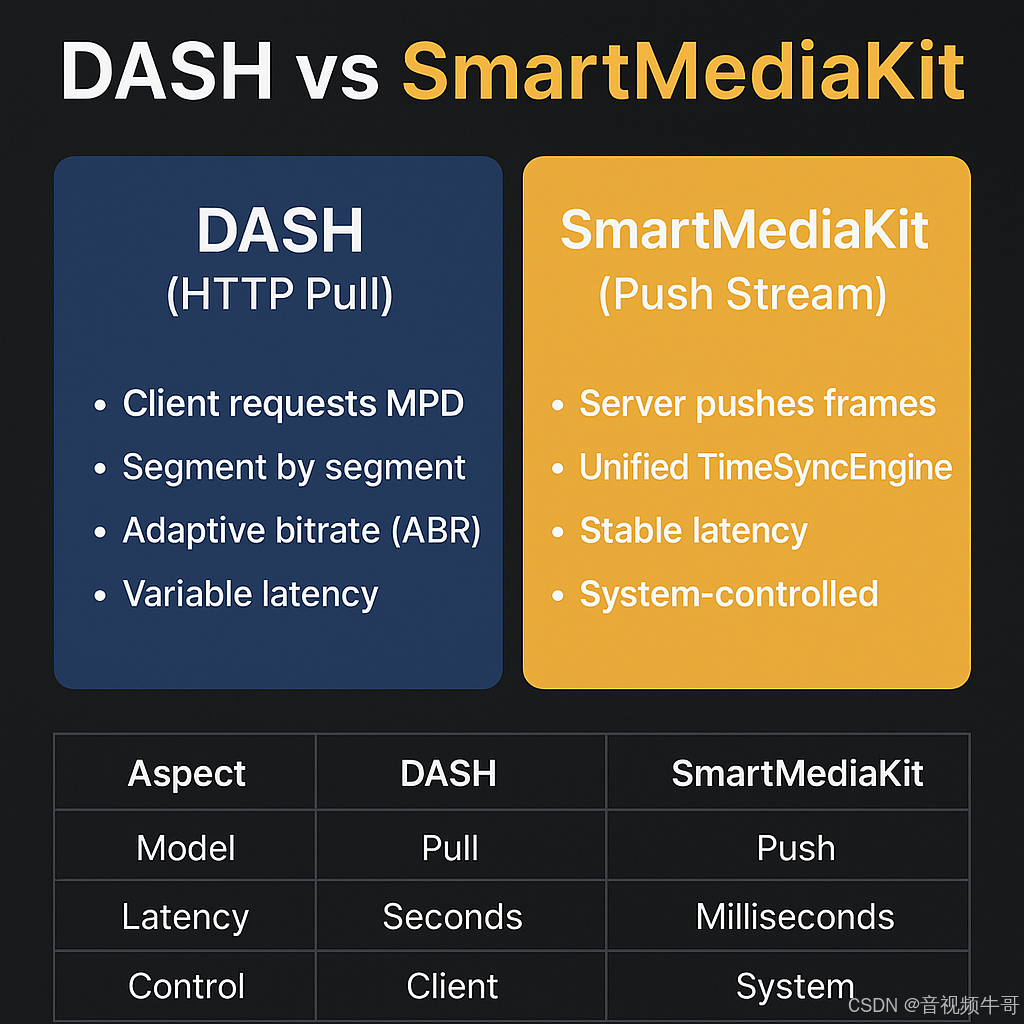
结论先行:我们确实研究过 DASH,但没有在 SmartMediaKit 中落地。原因不是“做不了”,而是不匹配我们的目标场景:以低延迟直播与可控时序为中心的工业/无人机/安防/远控链路。
本文只做两件事:
-
用DASH 协议规范拆解它“擅长什么/适合哪里”;
-
对照 SmartMediaKit 的典型场景与模块,给出不支持的工程理由与替代路线。
2. DASH 协议要点
2.1 播放描述:MPD(Media Presentation Description)
-
作用:以 XML 清单(MPD)描述内容结构、码率层(Representation)、分片(Segment)地址/时间、字幕/音轨等。
-
Profile/模式:
on-demand、live、event。 -
Live 关键点:MPD 周期性更新(更新窗、可用窗口、live edge 计算)。
2.2 分片寻址与时间轴
-
三种常用方式:
SegmentTemplate(Number/Time 索引)、SegmentList(显式列举)、SegmentBase(索引在容器内)。 -
时间模型:
SegmentTimeline(显式时间轴)或序号推算;可配置 timescale、duration、startNumber。 -
UTCTiming:用于服务端-客户端时钟对齐(常被忽略,但做严谨直播必须处理)。
2.3 容器与加密
-
容器主流:fMP4(ISOBMFF)。
-
加密:CENC(common encryption),便于多 DRM(Widevine/PlayReady/FairPlay…)共用密文。
-
辅助轨:多字幕、多音轨、trick mode 轨等。
2.4 低延迟(LL-DASH)的实现思路(规范层面)
-
基于 CMAF chunk/partial segment 的分片内分块,MPD 配合
availabilityTimeOffset等参数描述可用性。 -
传输依赖分块到达就可播放(chunked transfer 等),客户端实时拼接。
-
仍旧是HTTP pull 机制,本质上需要频繁 MPD 评估 + 细粒度分片拉取。
规范侧小结:DASH 的强项是结构化描述 + 自适应,天然适配点播/长视频/多轨/DRM/广告。Live 能做,但链路仍以客户端拉取 + 周期更新为核心。
3. DASH 典型适用场景
-
OTT/长视频点播:多清晰度、多字幕、多音轨、DRM,分发稳定、延迟不敏感。
-
事件型直播:延迟在数秒级可接受,业务重心在覆盖面与内容合规(广告、加密、统计)。
-
浏览器首要、生态统一:以 Web/MSE 播放为主、终端多样且对统一加密与清单管理有强需求。
-
广告与运营治理要求高:SCTE-35、插播编排、ABR 策略 A/B 测试。
换句话说:当延迟目标是“秒级/容忍波动”,且“多轨/加密/编排”是主诉求时,DASH 是好方案。
4. 为什么 SmartMediaKit 没做 DASH
SmartMediaKit 的主要落地:工业检测、低空无人机、安防监控、远程操控、AI 在线分析。这些有共性:
-
低延迟且“稳”:不是“尽量快”,而是小且可控(控制/观测闭环)。
-
端到端时序闭环:推流/转发/播放/录像/AI 必须在统一时钟域下运转。
-
网络复杂但要可预测:弱网偶发抖动可以接受,“不确定拉取-切换行为”不可接受。
-
回放/录像与在线分析要同一时间基:方便帧级定位、追溯与联动。
把这四点与 DASH 的pull + ABR + MPD 更新方式放一起,得到三个实操阻碍:
4.1 拉取模型带来“请求节奏”不确定
-
Live 的 MPD 需要周期更新;客户端定期拉取清单 + 新分片。
-
即便 LL-DASH 用 partial segment,也仍需持续高频请求判定。
-
在弱网/蜂窝场景,额外的请求-响应往返就会带来边缘抖动,难做“毫秒级闭环”。
4.2 时钟与多流对齐难度大
-
规范提供了
UTCTiming,但工程上终端实现不一致,且多设备跨网络难以保证“严谨同钟”。 -
多路画面并列对比(双目/多摄),我们需要“帧到帧可控的对齐”。DASH 把时间放在片段与客户端推理层,全局对齐代价高。
4.3 ABR 决策不可预测
-
ABR 的出发点是保证可播放;我们的出发点是保证可控。
-
码率切换/层切换意味着缓冲窗口与渲染节奏会变化;在实时控制场景,“节奏变化”本身就是风险。
结论:并非 DASH 不好,而是它的“pull + ABR + 周期清单更新”的基本工作方式,与“低延迟、强时序闭环”的系统目标不一致。
5. 我们采用了什么替代路径
目标:维持 HTTP 友好与分发兼容,同时把时间控制权留在系统侧。
-
HTTP-FLV / WebSocket-FLV(持续推送)
-
仍走 HTTP/WebSocket 通道,但服务端主动推送连续字节流;
-
客户端只做统一时钟驱动渲染,不做复杂 ABR;
-
链路节奏由系统定义,不是由“拉取粒度/时机”定义。
-
-
RTSP / RTMP(按需补充)
-
在需要设备对接/轻量发布/历史设备生态的场景按需使用;
-
在 SmartMediaKit 内部同样纳入统一时间域(TimeSyncEngine)。
-
-
GB28181(政企/安防)
-
标准对接,侧重信令/接入;媒体流仍纳入系统时钟域;
-
录像/回放/AI 走同一时间基,减少“跨体系对齐”成本。
-
安卓RTMP播放器同时播放4路RTMP流延迟测试
这套方案对 DASH 的“可核对”替代:
– DASH 的 MPD/ABR 决策 → 我们用服务端持续推送 + 统一时钟代替;
– DASH 的 partial segment 低延迟 → 我们用小缓冲 + 连续流实现低延迟且节奏稳定;
– DASH 的多轨/加密生态 → 我们按业务场景用模块组合解决(推流端/服务端/播放端一体化时钟),保持工程可控。
6. 工程影响面:如果强加 DASH,会发生什么
下面是工程维度的影响清单,都是“要落地就必须面对”的项目:
-
服务端:MPD 生成/更新、窗口管理、UTCTiming 服务、CMAF 切片与 partial 写入一致性。
-
客户端:MPD 解析状态机、ABR 策略、分片/partial 请求调度、failover 与 backoff 策略。
-
CDN/边缘:partial/小分片缓存命中、回源一致性、链路拥塞时的负面放大效应。
-
系统时序:多路流对齐、录像与在线分析共时、控制指令回路的因果稳定。
这些都不是“能不能实现”的问题,而是实现后整个系统的可预测性会下降。
对我们的目标业务,可预测性 > 功能广度。
7. 什么时候你仍然应该选 DASH
如果你的需求满足以下 ≥3 条,建议首选 DASH:
-
以点播/事件直播为主,秒级延迟可接受;
-
DRM/多终端一致加密是强需求;
-
多字幕/多音轨/广告编排是硬指标;
-
主播放环境是浏览器/MSE,或已有成熟 DASH 播放链路;
-
业务更看重广覆盖/一致性,而非毫秒级控制。
反之,如果满足以下 ≥3 条,DASH 并不合适:
-
实时控制/远程操控,链路延迟需要亚秒级且稳;
-
多路画面帧级对齐(工业检测/对比分析/指挥调度);
-
录像/回放/AI 要与在线流同一时间基联动;
-
弱网/蜂窝网络为主,希望最少的请求往返与更强的链路节奏可控;
-
可接受以持续推送为核心的 HTTP/WS 方案。
8. 我们的取舍
-
DASH 的强项:结构化清单、自适应、多轨/DRM、生态一致性。
-
SmartMediaKit 的强项:低延迟、统一时钟域、链路节奏可控、模块间时间自洽。
-
不做的原因:DASH 的 pull/ABR/周期更新模型与毫秒级闭环目标冲突。
-
替代路线:HTTP-FLV/WS-FLV + RTSP/RTMP/GB28181,全栈统一 TimeSyncEngine。
9. 结语:为什么我们没有做 DASH
从协议层面看,DASH 是一套设计合理、生态完善的标准。但从系统角度看,它的HTTP 拉流 + MPD 自适应模型决定了它更适合点播或高延迟直播场景,而非实时系统。
SmartMediaKit 的主要目标是:
-
保证端到端的毫秒级延迟与时间一致性;
-
实现推流、播放、录像、AI 分析等模块的统一时钟域协同;
-
让系统在弱网和复杂链路下仍能稳定、自洽、可控。
DASH 的核心机制(MPD 更新、ABR 策略、分片拉取)与这些目标相冲突。它会引入更多请求往返、分片等待与时间漂移,使系统难以维持闭环。
因此,我们选择不实现 DASH,不是因为技术门槛,而是因为它不符合我们要解决的问题类型。
我们优先支持 RTSP、RTMP、HTTP-FLV、WebSocket-FLV、GB28181 等协议,是基于统一时序、低延迟和系统可控性的综合权衡。
在大牛直播SDK的定位里,稳定、可控的时间体系比“标准化的兼容性”更重要。
这就是我们没有去做 DASH 的根本原因。
📎 CSDN官方博客:音视频牛哥-CSDN博客