seo查询 站长工具利用织梦搭网站
研究背景
在以人为中心的环境中,机器人与人类、周围环境或其他机器的物理交互需要兼顾柔顺性与安全性。尽管柔顺硬件能在一定程度上助力此类交互,但阻抗控制器作为扭矩控制机器人实现安全、被动响应接触并精准执行任务的关键,其有效性高度依赖机器人及所操作物体的精确动力学模型。
现实中,模型失配常导致任务失败和不安全行为,例如机器人末端执行器负载变化时,原有模型难以适应,可能引发轨迹偏移或不稳定。
宾夕法尼亚大学研究人员以Franka Research 3 机械臂为实验载体,提出了快速失配估计(RME)框架,这是一种自适应、与控制器无关的概率框架。
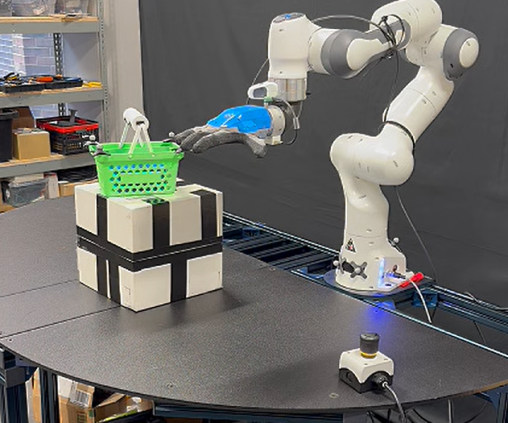
最新款Franka Research 3 具有7 自由度设计与可靠性能,让复杂的静态和动态交互实验得以顺利开展,充分验证了 RME 框架的有效性。
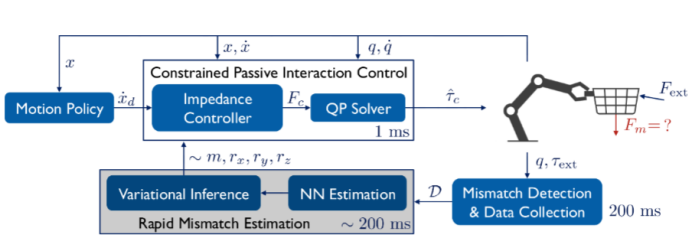
图 1:该框架无需外部力- 扭矩传感器,仅通过机器人的本体感受反馈,就能在线估计末端执行器的动力学失配,且能在约 400 毫秒内适应末端执行器质量和质心的突然变化,有效解决了模型失配带来的问题,保障了机器人在静态和动态场景下与环境交互的安全性和稳定性。
研究核心方法
整体框架
RME 框架以贝叶斯推理为基础,结合神经网络和变分推理实现快速失配估计。首先通过失配检测算法监控外部扭矩的变化,判断是否出现动力学失配;当检测到失配后,收集相关数据并输入神经网络模型失配估计器得到先验分布;最后利用变分推理对先验分布进行优化,快速收敛到失配参数的估计值。
神经网络模型失配估计器
输入为末端执行器外部伪力序列,通过雅可比矩阵的阻尼伪逆从关节外部扭矩计算得到。
架构包含1D 卷积层(捕获局部模式,增强平移不变性)、位置嵌入和多头注意力机制(捕获全局依赖关系)、均值池化以及多层感知器(最终回归得到失配参数的先验均值)。

图3:RME 神经网络架构。在该网络中,我们输入维度为 RM×64 的伪力序列,依次应用卷积层、位置嵌入和多头注意力机制;随后对注意力分数进行均值池化,并应用一个序贯多层感知器,最终通过回归得到失配参数 θ。
在仿真中训练,使用350 次不同失配参数下的机械臂动力学模拟数据,采用均方误差损失和 dropout 防止过拟合。
变分推理
由于真实后验分布难以处理,构建平均场近似分布,通过最小化Kullback - Leibler 散度,等价于最大化证据下界(ELBO)来优化变分参数。
利用重参数化技巧和随机梯度下降(Adam 优化器)估计变分参数,确保快速收敛,加速估计过程。
实验配置
-
机械臂:采用7 自由度 Franka Emika 扭矩控制机械臂,其配备嵌入式扭矩传感器,可提供关节扭矩等本体感受反馈。
-
控制器:使用约束被动交互控制器(CPIC),该控制器能在保证无源性的同时,通过二次规划(QP)优化处理运动学约束(如关节限制、自碰撞等),QP 优化通过 CVXGEN 实现。
-
硬件环境:实验在配备11 代 Intel Core i7 - 11700K @ 3.60 GHz CPU 的工作站上进行,无需 GPU 加速。
-
参数设。
-
置:凭经验将变分推理先验的标准差调整为σₚᵣᵢₒᵣ = [0.5, 0.02, 0.02, 0.05]
实验设计与验证
消融实验
分析神经网络对变分推理预测精度的影响:对比使用神经网络预测先验均值和先验均值为0 时的估计结果,表明神经网络引导显著降低了质心估计的均方误差。
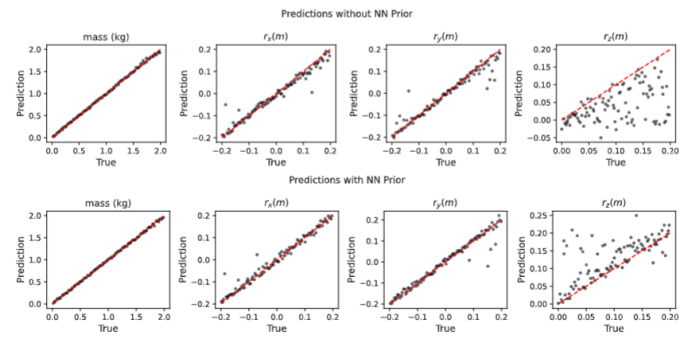
图4:不同先验构造下RME估计失配参数θ的平价图比较;如图所示,神经网络引导允许更稳健的质心估计。
研究数据收集间隔长度的影响:评估不同间隔(50ms、100ms、200ms、300ms)下的估计精度,确定 200ms 为兼顾精度和效率的最优间隔。
Franka人机交互实验
实验
场景:在末端执行器添加未知质量,使机械臂动力学模型突然变化,测试其保持目标平衡位置和方向的能力。
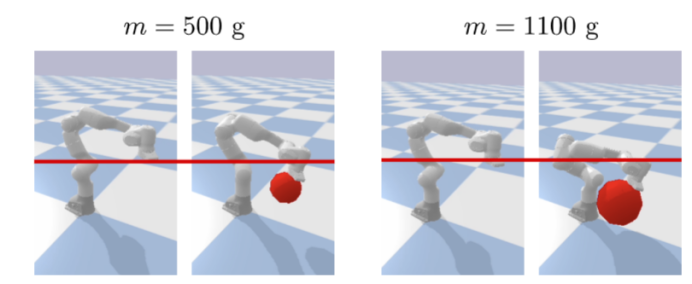
图5:机械臂动力学在末端执行器上附加未知质量时的计算机仿真。该图比较了机械臂在应用失配之前的平衡位置(红线)与其在应用 500 克和 1100 克未知质量后不久的位置(红色球体),分别如左图和右图所示。
结果:RME 能快速准确估计失配参数,平均估计时间 226ms,使机器人快速收敛到平衡位置。
真实实验
跟踪稳定极限环:机械臂在y-z 平面跟踪具有稳定极限环的动态系统,RME 能快速估计失配参数,使机器人收敛到期望轨迹,而无自适应时会出现伪吸引子。
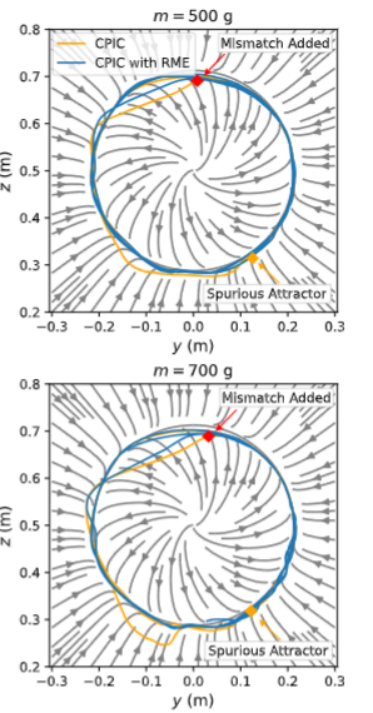
图6:机械臂在受到动力学模型失配的情况下,跟踪 y-z 平面上具有稳定极限环的动态系统。
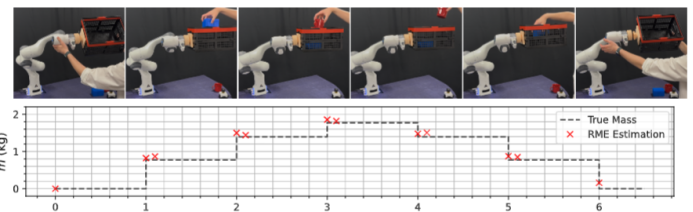
图7:机械臂在受到人类产生的扰动时对动力学模型的顺序变化的自适应。每个步骤表示修改末端执行器的动力学模型;两个步骤之间的 RME 预测表示对先前 θ 估计的立即纠正。
人机交互顺序自适应:人类将未知篮子连接到末端执行器并动态添加/ 移除重物,RME能准确估计失配参数,使机器人保持目标位置和方向,且对人类扰动保持被动。
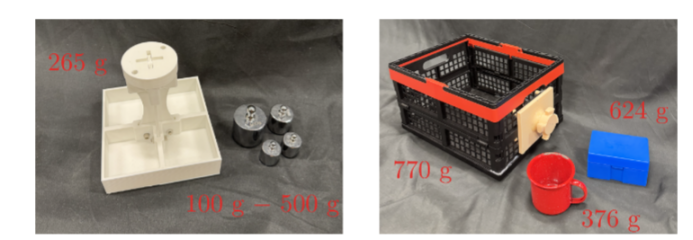
图8:用于 RME 评估的末端执行器和未知物体。左图显示用于静态实验和极限环跟踪的 3D 打印篮子。右图描绘了带有 3D 打印连接器的市售篮子,用于人机交互的顺序自适应实验。
关键成果与突破
-
实时性与高效性:实现了约400毫秒内对末端执行器质量和质心突然变化的估计与适应,远快于现有需要10秒系统识别的方法,满足实时交互需求。
-
无需外部传感器:仅依靠机器人本体感受反馈进行估计,避免了外部力- 扭矩传感器带来的灵活性降低、有效载荷减少和成本增加等问题。
-
保持系统无源性:在估计存在误差时,仍能保证闭环系统的局部渐近稳定性和相对于特定输入- 输出端口的无源性,确保交互安全。
-
通用性与鲁棒性:与控制器无关,可应用于多种被动阻抗控制器;通过仿真训练和数据增强,对噪声具有鲁棒性,能从仿真迁移到现实场景。
结语
GRASP实验室提出的基于神经网络引导变分推理的快速失配估计框架,为机器人在动态环境中实现安全、高效的物理交互提供了重要解决方案。其在实时性、无需外部传感器、保持系统无源性等方面的突破,推动了机器人自适应控制技术的发展。
而Franka Research 3机械臂凭借其出色的性能,成为此次科研实验的得力助手,助力研究人员顺利完成各项复杂实验,为技术突破提供了可靠的硬件支持。
项目详情:https://mateusz-jaszczuk.github.io/rme/