自动驾驶中的传感器技术73——Navigation(10)
GNSS中的几个基本概念
1、DGPS
差分 GPS(DGPS)原理概述
误差来源
GPS 定位受卫星钟误差、星历误差、电离层延迟、对流层延迟、多径效应等公共误差的影响。这些误差在同一地区、同一时间内对不同接收机基本相同。
基准站(参考站)
在已知坐标的固定点上安装一台高精度 GPS 接收机。
基准站接收同一颗卫星的信号后,计算出“测得的伪距” ρ₍r₎ 与几何距离 r₍r₎ 之差,即误差 Δρ = ρ₍r₎ – r₍r₎。
该误差即为该卫星在该时刻、该区域的公共误差。
误差广播
基准站通过无线电、VHF、2.4 GHz、Wi‑Fi、433 MHz 等方式实时发送误差改正数(Δρ)给周围的移动站(用户站)。
改正数可以是位置差分(坐标改正)、伪距差分(伪距改正)或载波相位差分(RTK)等不同形式。
用户站(流动站)校正
用户站接收相同卫星的伪距测量 ρ₍u₎,并用基准站发来的改正数进行校正: ρ′₍u₎ = ρ₍u₎ – Δρ。
采用校正后的伪距(或载波相位)重新解算位置,公共误差被大幅消除,定位精度从米级提升到分米、甚至厘米级。
常见差分方式
位置差分:基准站直接发送坐标改正数,适用于基线 ≤ 100 km,精度约 1 m。
伪距差分(RTD):最常用,基准站发送每颗卫星的伪距改正,适用范围更广,精度约 0.5–1 m。
载波相位差分(RTK):利用载波相位测量并进行整数模糊度解算,实时提供厘米级精度,常用于测绘、工程施工等高精度场景。
2、RTD实时动态码差分技术,伪距差分
内容 | 说明 |
|---|---|
定义 | RTD 是一种基于 码相位(伪距)差分 的实时定位技术。它通过基准站对伪距(或坐标)进行修正,将差分值实时发送给移动站接收机,移动站再结合自身观测值计算出精确位置。 |
工作原理 | 1. 基准站已知自身坐标,接收所有卫星的码相位信号,计算每颗卫星到基准站的真实距离(伪距)。 |
系统组成 | - 基准站:配备多通道接收机(常规 12 通道)以确保能够接收全部可见卫星信号。 |
定位精度 | RTD 的定位精度一般稳定在 1 ~ 5 米 范围内,属于亚米级定位。 |
与 RTK 的区别 | - RTD 使用 码相位差分(伪距),精度为 1‑5 米。 |
典型配置 | - 基准站 12 通道(或更多)接收机,以覆盖全部卫星。 |
应用场景 | - 农业、测绘、无人机、车辆导航等对 亚米级 精度有需求的实时定位场景。 |
发展趋势 | 随着 GNSS 星座的增多(如 Galileo、BeiDou)以及通信链路(4G/5G)带宽提升,RTD 的 更新率 与 可靠性 正在进一步改善,适用范围有望进一步扩大。 |
小结:RTD 实时动态码相位差分技术是一种基于伪距差分的 GNSS 定位方案,能够在数秒内提供 1‑5 米级的定位精度。它的核心优势在于实现 实时、成本相对低,适用于对精度要求不高于厘米级但需要快速、连续定位的各类行业应用。
3、RTK载波相位差分
RTK 通过基准站(Reference)和流动站(Rover)两套 GNSS 接收机实时交换载波相位观测值,在数据链路上形成双差分(double‑difference)观测量,消除卫星钟差、轨道误差以及大气延迟等公共误差,从而实现厘米级定位。
载波相位的波长约 20 cm,远小于伪距码的误差,因而能够提供更高的测距精度。
双差分的核心是对同一时刻、同一颗卫星的基准站与流动站相位差再对另一颗卫星做差,形成 基准‑流动‑卫星‑卫星 四元组,彻底抹去公共误差。
为了得到唯一的整数模糊度(Integer Ambiguity),RTK 常采用 LAMBDA 或 ILS 等算法进行快速解算
双差分观测 基准站‑流动站对同一卫星的相位差,再对另一卫星做差,消除公共误差
RTK 是一种基于载波相位观测的 GNSS(GPS、北斗、GLONASS、Galileo 等)高精度定位技术。它通过实时处理两个测站(基准站 + 流动站)的载波相位差分,在野外即可得到厘米级的三维坐标解算,属于 GNSS 应用的里程碑技术。
工作原理
步骤 | 关键操作 | 目的 |
|---|---|---|
整数模糊度解算 | 通过 LAMBDA 等最小二乘法把相位差转化为整数值,确保厘米级精度 | |
多频/多星座 | 同时使用 GPS、北斗、GLONASS、Galileo 等多星座、双频甚至三频,提高可靠性与抗干扰能力 | |
① 基准站观测 | 基准站固定在已知坐标点,连续接收多颗卫星的载波相位、伪距等观测值 | 获取高质量原始观测并计算误差模型 |
② 差分数据广播 | 将基准站的观测值、坐标及误差改正信息通过无线/4G/Internet 发送给流动站 | 实时提供公共误差(卫星轨道、钟差、大气延迟、相位偏差) |
网络 RTK(CORS) | 多基准站组成连续运行参考站网络(CORS),通过 VRS、MAC、FKP 等模型向用户广播统一改正,覆盖范围可达百公里以上 | |
实时数据链路 | 常用 LTE、5G、UHF、卫星通信等方式把基准站改正信息实时下发给流动站,时延通常 < 1 s | |
误差模型 | 包括电离层、对流层、天线相位中心误差等,现代系统采用区域电离层模型或 AI‑驱动的误差预测来进一步提升精度 |
4、卫星星历和精密星历
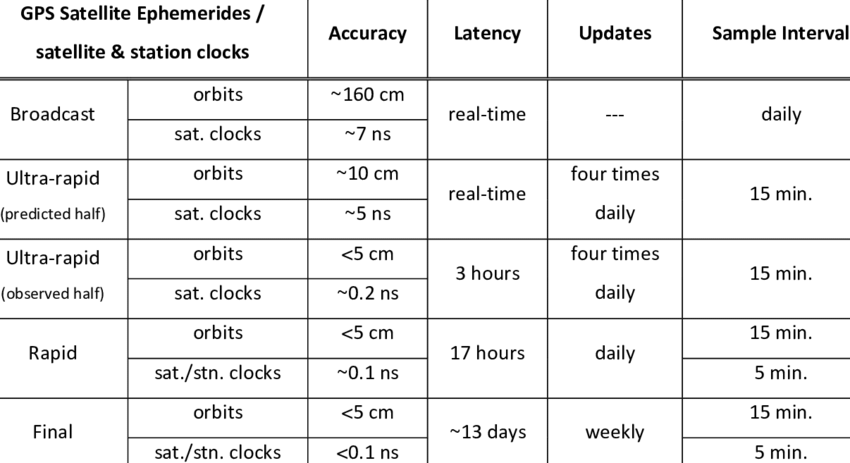
预报星历(广播星历)和后处理星历(精密星历)
项目 | 预报星历(广播星历) | 后处理星历(精密星历) |
|---|---|---|
传输方式 | 通过 GPS 卫星的导航电文实时广播,使用 C/A 码(民用)发送 | 通过地面数据链路(磁带、电视、电传、卫星通信等)事后分发,使用 P 码(军用)发送 |
更新频率 | 每 30 秒(每 30 秒一帧)或每 2 分钟(每 2 分钟一组)实时提供,适合实时导航 | 通常按 15 分钟或 30 分钟间隔提供一次完整星历,供事后使用 |
精度 | 位置误差约 10 ~ 40 米(数十米级) | 位置误差约 5 米(可达分米甚至厘米级,取决于提供方) |
使用对象 | 面向所有民用用户(手机、车载导航、普通 GNSS 接收机) | 主要面向高精度需求的用户(军用、科研、测绘、精密定位服务),一般需付费获取 |
获取方式 | 免费、实时、无需额外授权,直接由卫星广播 | 需向提供机构(如 IGS、国家测绘局等)申请或付费下载,非公开广播 |
星历内容 | 包含 16 条轨道参数(开普勒六参数 + 摄动改正项)以及卫星时钟校正等,适用于实时位置计算 | 同样包含完整轨道参数,但基于更密集、精密的观测数据进行后处理,误差更小 |
典型应用 | 日常导航、车辆定位、手机定位、普通 GNSS 设备 | 高精度测量、基准站网络、航空航天、军事导航、科研实验等 |
码的特性 | C/A 码频率 1.023 MHz,重复周期 1 ms,码间距约 1 µs(对应约 300 m) | P 码频率 10.23 MHz,重复周期 266.4 天,码间距约 0.1 µs(对应约 30 m) |
预报星历(C/A码):实时、免费、精度较低(数十米),适合大众民用定位需求。
后处理星历(P码):事后提供、需付费或授权、精度高(5 米甚至更好),主要服务于军用、科研和高精度测绘等专业领域。