AIRSKIN®机器人电子皮肤传感器:为科研机器人披上智能“皮肤”
在具身智能、人机协作与自主机器人研究快速发展的今天,一个关键问题日益凸显:为什么机器人看得见、算得快,却依然“不敢碰”世界?
视觉、语音、力控技术已日趋成熟,但机器人对全身接触的连续感知能力仍严重缺失。在实验室中,我们常看到机器人因一次意外触碰而急停,或因安全限制被迫远离人类操作者——这不仅影响实验效率,更限制了真实交互场景的构建。科研需要的不仅是“安全”,而是在高速、高精度、高自由度下实现人机共融的能力。
这正是AIRSKIN®机器人电子皮肤传感器的核心价值。
AIRSKIN®:为机器人赋予“类人触觉”的核心技术
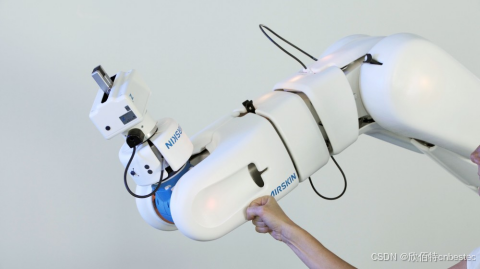
由Blue Danube Robotics研发的AIRSKIN®防碰撞传感器,是一套基于气压传感原理的智能电子皮肤系统,通过软性、压敏的模块化外壳覆盖机器人潜在碰撞区域,实现全方位接触感知。
Airskin机器人电子皮肤传感器碰撞演示
✅ 关键技术参数
- 触发灵敏度:仅需 5牛顿(N) 接触力即可响应,符合ISO/TS 15066人体安全限值;
- 响应速度:系统每 4毫秒 自检一次,确保实时监控;
- 安全认证:通过 PL e, Cat. 3 / SIL 3 功能安全认证,安全等级超越多数协作机器人;
- 模块化设计:磁性连接,IP54防护,最多支持 15个模块串联,适配复杂曲面;
- 即插即用:24V供电,OSSD安全输出,可接入主流机器人控制器。
为什么企业和科研团队选择AIRSKIN®?
它不仅适用于KUKA、Stäubli、Yaskawa等工业机器人,还可为UR(Universal Robots)等协作机器人提供额外的全身防护,提升整体安全性与实验自由度。
更重要的是,它让机器人在保持高精度、高重复性的同时,真正实现“无围栏”运行,显著提升实验空间优化能力,为多机协同、移动操作、人机共融实验提供优质平台。
科研与工业融合的应用场景

AIRSKIN®已在全球300多个应用中验证,其技术正广泛服务于前沿科研与先进制造:
- 人机协作研究:自然交互、协同装配、共操作行为建模;
- 精密操作:微装配、细胞处理、仪器维护等微力控制任务;
- 自动化任务:机器上下料、螺丝锁付、质量检测与清洁维护;
- 可重构系统:快速搭建符合ISO/TS 15066标准的柔性实验平台;
- 服务机器人验证:在有限空间内部署高负载机器人执行递送、检测等任务。

如果您的科学研究和企业升级正在探索智能机器人的边界,那么缺少AIRSKIN®,可能就意味着错失高精度物理反馈与灵活的实验自由。
让机器人真正“感知”世界——从拥有一层智能的皮肤开始。
欢迎关注 “欣佰特科技” ,持续为大家带来 “具身智能领域”前沿技术及应用!