从顶流综述,发现具身智能的关键拼图----具身智能的内部模拟器:World Model如何成为AI走向真实世界的关键技术
引言:从人类认知到机器理解的桥梁
当我们走进一个陌生的房间时,大脑会迅速构建一个内部的空间模型——预测哪里可能有障碍物,哪个角落适合放置物品,如何规划最优的行走路径。这种神奇的能力源于人类大脑中的"世界模型"(World Model),它像一个内部模拟器,帮助我们理解环境、预测未来、指导行动。
如今,随着具身智能(Embodied AI)的快速发展,研究者们正试图将这种认知能力赋予机器。从扫地机器人的路径规划,到自动驾驶汽车的决策制定,再到双臂机器人的精细操作,World Model正成为连接感知、预测和决策的关键桥梁。
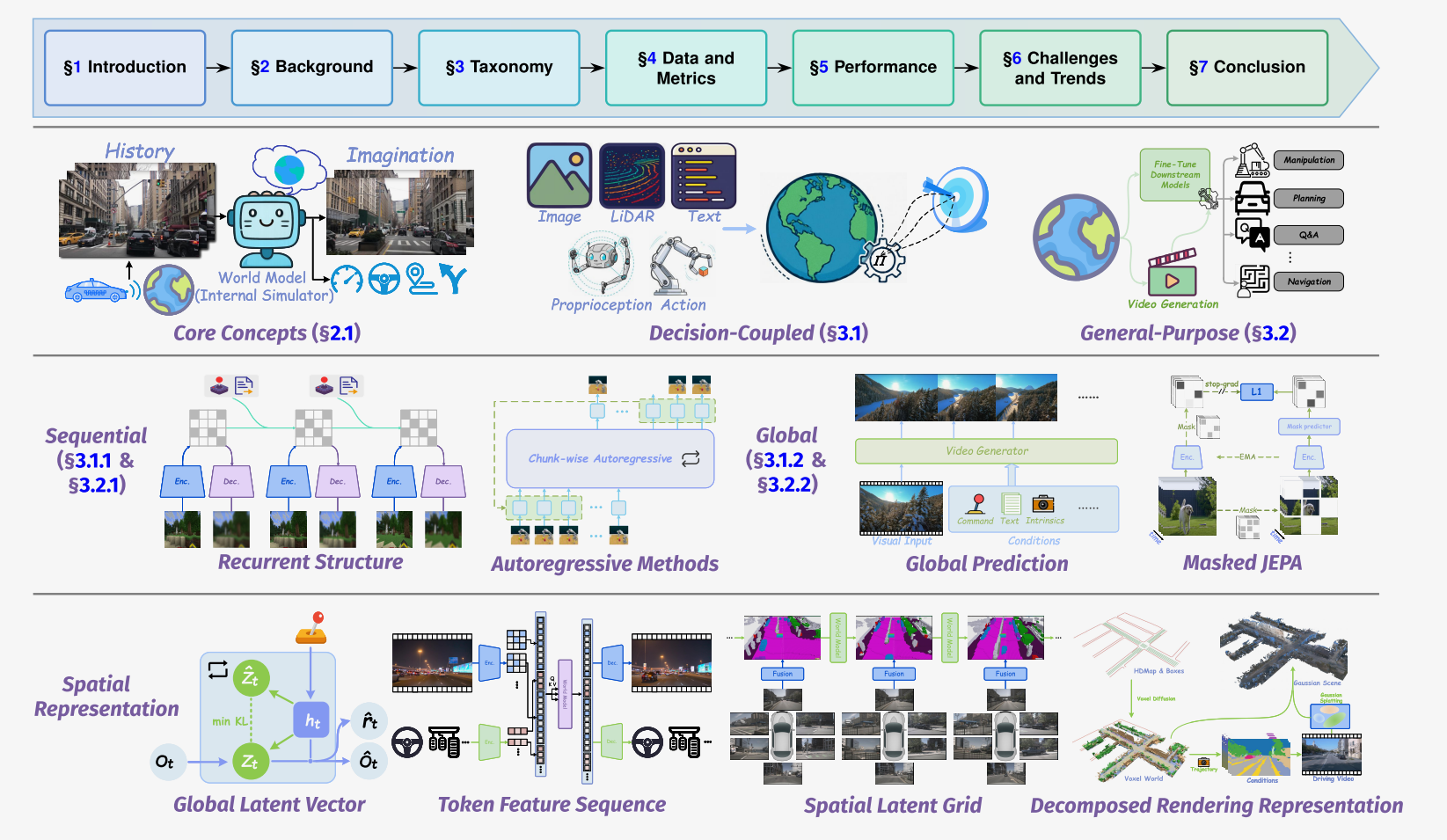
▲原文图1|本综述的结构图。该图沿着三个轴对世界模型进行分类,并展示了每个分类的代表性方法,提供了该领域的统一视图。
近期发表的综述论文《A Comprehensive Survey on World Models for Embodied AI》[原文图1]系统性地梳理了这一领域的发展脉络,首次提出了具身智能世界模型的三维分类框架,为该领域的理论构建和实践应用提供了重要指导。本文将基于这一权威综述,深入解析World Model在具身智能中的核心价值、技术演进和未来趋势。

维度一:功能导向——从专用到通用的演进路径
这种为“专才”量身定制的模式,也带来了明显的局限性。
传统的“决策耦合型”世界模型,虽然在它们专注的单一任务——比如路径规划或特定物体操作——上表现优异,但它们的“模型结构紧凑,推理效率高”的优点,是以牺牲跨任务的泛化能力为代价的。换句话说,一个精通路径规划的模型,面对抓取操作时,就可能束手无策,需要针对新任务重新训练。
我们真正需要的,是AGI(通用人工智能)的“基石”——一个“全能型”的智能体。
学界的目光也正聚焦于此,研究趋势明确地指向了“通用型”世界模型。这类模型被设计为任务无关的环境模拟器,它们的目标是提供统一且强大的环境理解能力,从而支持多种下游任务。
通用型模型的优势显而易见:
● 🌟 跨任务知识迁移能力强
● 🚀 支持零样本或少样本学习,让智能体快速适应新环境
● 💡 为AGI奠定基础
为了更好地理解世界模型是如何从“专才”走向“全才”的,我们可以从功能导向维度进行划分。
维度二:时序建模——自回归与全局预测的技术博弈
理解了世界模型的“功能导向”之后,我们必须正视它的核心挑战:如何精确地进行时序建模?
这就像为AI搭建一座“时间机器”,它需要能够预测环境在下一刻乃至更远的将来会发生什么变化。
在应对这一挑战的过程中,学界形成了两种主要的策略,它们在“预测精度”与“计算效率”之间做出了不同的权衡:
| 建模策略 | 核心思想 | 代表模型 | 优/劣势 |
| 序列模拟推理 | 逐步展开(自回归),预测未来状态。 | Dreamer系列 | 🌟 优势:精确捕捉复杂的长期时序依赖。 💥 挑战:计算复杂度随预测长度线性增长。 |
| 全局差分预测 | 并行预测,同时预测整个未来序列。 | JEPA系列 | 🌟 优势:计算效率更高,适用于实时控制。 💥 挑战:建模长期依赖关系时存在挑战。 |
简单来说:如果你追求精确的长期预测(如复杂规划),序列模拟推理表现更优;如果你需要高效率的实时控制,全局差分预测则具有明显优势。
这种差异不仅体现在性能指标上,更反映在模型的内部结构和工作流程上。
维度三:空间表示——从抽象到具象的多层次建模
如果说时序建模是世界模型的“时间机器”,那么空间表示就是它的“感知系统”——它决定了模型如何“看”待和理解环境。
空间表示的选择,直接影响了世界模型的表达能力和计算效率,而学界也因此划分出了四种主流的表示范式,它们在抽象度和几何保真度之间进行了巧妙的平衡:
| 范式 | 核心特点 | 适用场景 / 代表 |
| 1. 全局潜在向量 | 将整个场景编码为固定维度的向量。 | 优点: 计算高效,适合实时控制。 代表: DreamerV3 (Atari, DMC) |
| 2. 令牌特征序列 | 场景分解为令牌序列(受Transformer启发)。 | 优点: 支持多模态融合和复杂依赖建模。 ⚠️ 注意: 计算复杂度相对较高。 |
| 3. 空间潜在网格 | 保持空间几何先验的网格化表示。 | 优点: 适合BEV、体素表示,自动驾驶等精确空间任务。 |
| 4. 分解渲染表示 | 基于NeRF、3D GS等显式几何建模。 | 优点: 生成高质量三维场景表示。 挑战: 计算开销最大。 |
这四种表示方法,如同四种不同的“镜头”,各有其优势和局限。
[原文表2] 提供了详细的汇总,清晰地总结了每种方法的优缺点和适用场景,是理解世界模型空间表示的指南。
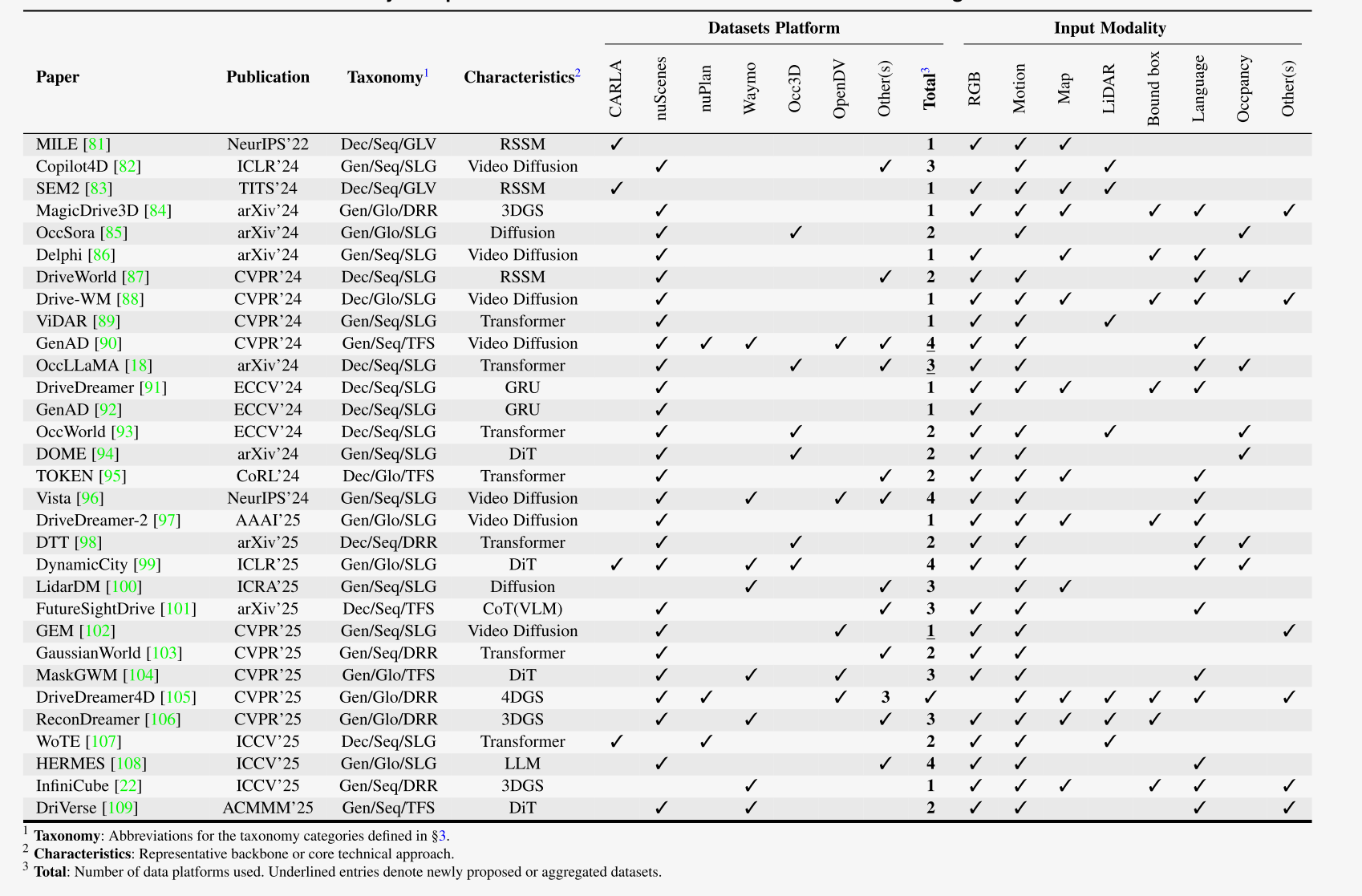
▲原文表2|自动驾驶领域代表性世界模型总结。

架构演进的三个阶段
世界模型的演进史,就是一部不断追求更强泛化能力和更高效率的架构升级史。
我们可以将世界模型的技术发展划分为三个里程碑式的阶段,每个阶段都解决了前一代架构的“痛点”,为通用智能铺平道路:
第一阶段:循环神经网络时代(打下基础)
以 RSSM(Recurrent State Space Model) 为代表的早期模型,主要基于 RNN 架构。它们是世界模型的先驱,通过 递归状态更新 来实现时序建模。
● 特点: 擅长处理短序列,结构清晰。
● 局限: 在处理长序列时效果不佳,且难以充分利用现代硬件的并行计算能力。
第二阶段:Transformer和Diffusion主导(寻求突破)
随着 Transformer 架构 在NLP和视觉领域的统治,世界模型也开始引入 自注意力机制 进行时序建模,极大地提升了处理复杂长序列的能力。同时,Diffusion 模型 在高质量视频生成上的成功,也迅速被吸纳进世界模型的生成能力模块中。
● 成果: 强大的长程依赖建模和高质量的生成能力。
第三阶段:State Space Models(SSMs)的崛起(融合优势)
当前,Mamba 等 State Space Models (SSMs) 的出现,正在为世界模型打开一扇新的大门。SSMs 旨在兼具 RNN 的递归特性(高效的序列处理)和 Transformer 的并行能力(高效的硬件计算),在长序列建模方面展现出巨大的潜力,有望成为下一代世界模型的核心骨架。
● 目标: 解决前两代架构在效率或建模能力上的“鱼与熊掌”难题。
这三种主流架构在性能和开销上存在显著差异。

世界模型的终极价值,在于它们在现实世界中的应用潜力。无论是在工厂、马路还是日常生活中,世界模型正在驱动智能体实现能力上的巨大飞跃。
我们聚焦于三个最具代表性的应用领域,看看世界模型是如何引领技术革命的:
1. 机器人操作:从简单抓取到复杂协同
早期的世界模型主要满足于机器人完成简单的抓取和放置(Grasping and Placing)任务。但随着架构和表示能力的升级,现在的研究热点已跃升至双臂协同操作、动态环境下的实时适应等更为复杂的任务。这要求模型不仅要理解自身动作,还要预测物体和环境的动态变化。
● 能力演进: 简单 → 复杂协同、实时适应
2. 自动驾驶:走向端到端整合的“统一大脑”
自动驾驶领域的世界模型,正经历从“模块化”到“整体化”的重大转变。传统流程是将感知、预测、规划模块独立优化。如今,世界模型正朝着感知-预测-规划的端到端整合方向发展,目标是构建一个统一的决策大脑,以实现更低延迟和更高鲁棒性的决策。
● 技术趋势: 模块化 → 端到端整合
3. 通用智能(AGI):跨域迁移的终极探索
面向通用人工智能(AGI)的世界模型,是所有研究的终极目标。这类模型需要具备强大的跨域迁移和零样本泛化能力。研究者们正致力于构建一个统一的世界理解框架,使其能够将虚拟环境(如仿真器)中学到的知识,高效地迁移到真实世界中,实现真正的任务无关智能。
● 终极目标: 统一世界理解、零样本泛化

视觉竞争场——视频生成领域的“硬指标”
世界模型的视觉建模能力,直接决定了它能否成为一个合格的“环境模拟器”。在这一能力的终极战场——基于nuScenes数据集的视频生成任务——竞争异常激烈,而衡量模型优劣的,是两个“硬指标”:视觉保真度和时序一致性。
[原文表4] 详细汇总了主流模型的性能,揭示了当前技术的两大突破口:
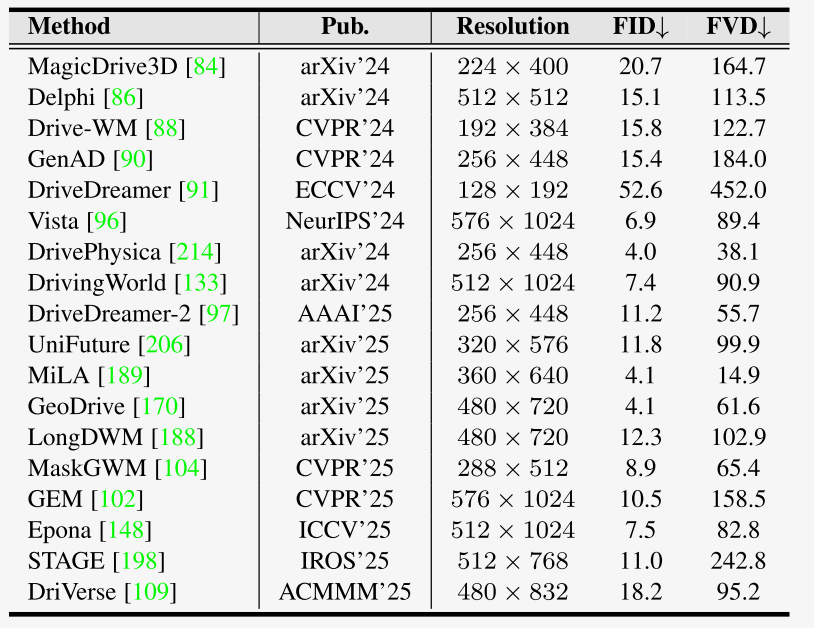
▲原文表4|在nuScenes数据集上的视频生成性能比较。
1. 视觉保真度(追求“真实感”)
这项指标通常由 FID (Fréchet Inception Distance) 衡量。
● 领跑者:DrivePhysica 模型以 FID 4.0 的成绩,显著领先于其他方法。
● 突破关键: 它的成功在于引入了物理约束,有效提升了生成视频的真实感和可信度,让“假”视频看起来更像“真”环境。
2. 时序一致性(告别“闪烁”)
这项指标由 FVD (Fréchet Video Distance) 衡量,它反映了视频画面在时间维度上的流畅性和连贯性。
● 领跑者:MiLA 模型表现突出,FVD 指标达到 14.9。
● 突破关键: MiLA 采用的时序注意力机制,有效地缓解了视频生成中常见的画面闪烁(Flickering)问题,确保了时间轴上的高度连贯性。
最终结论:
虽然市场呈现出 “单点突破” 的格局(DrivePhysica 擅长保真度,MiLA 擅长一致性),但数据也表明:集成多种技术手段的“混合架构”模型,在各项指标上表现出更为均衡和鲁棒的性能,这预示着未来世界模型将走向更全面的融合之道。
从“时间”到“时空”——突破4D预测与控制瓶颈
如果说之前的技术是在解决“平面”和“时间”问题,那么现在的世界模型则将挑战升级到了 4D(三维空间 + 时间) 这一更复杂的维度。
一、4D占据预测:从纯视觉到几何先验
Occ3D-nuScenes 数据集上的 4D 占据预测(Occupancy Prediction) 任务,是评估世界模型对真实世界动态理解的最高标准。
[原文表5] 揭示了决定预测精度的两大关键要素:
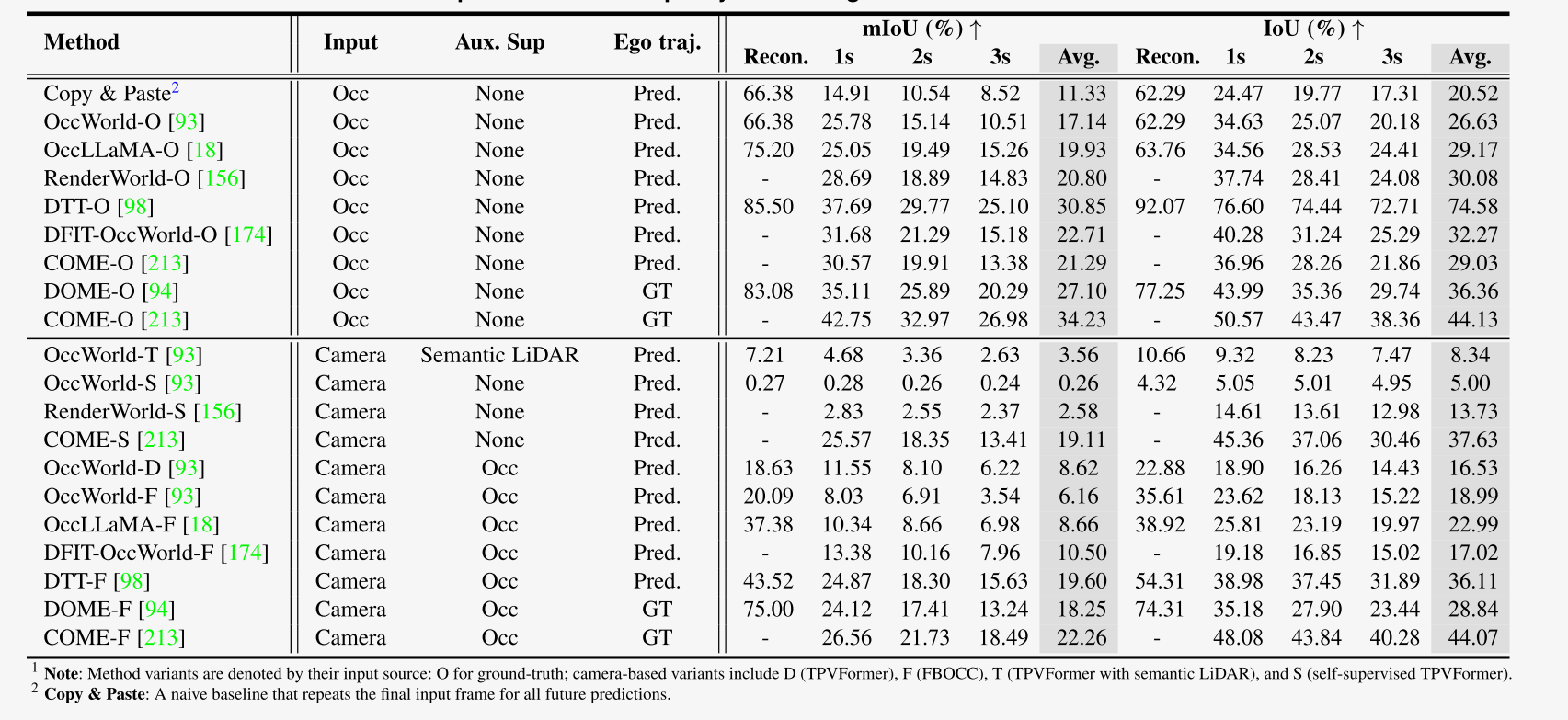
▲原文表5|在Occ3D-nuScenes基准测试上的4D占用预测性能比较。
1. 输入模态的决定性影响:
a. 关键发现: 使用真实占据信息作为输入的方法,比仅依赖纯视觉的方法性能显著更优。
b. 结论: 这强调了几何先验信息对世界模型进行精确空间理解的极端重要性。
2. SOTA模型策略:
a. COME 模型通过有效结合时序建模和空间表示学习,在多个指标上达到当前最佳性能(SOTA)。这再次证明了时空联合优化是实现卓越表现的必由之路。
二、机器人控制:数据效率的里程碑
在机器人控制任务中,世界模型的进步则体现在令人振奋的效率飞跃上:
● 训练效率的飞跃: 模型的数据效率从早期的 500万训练步数 (5M) 大幅缩减至 50万步 (500k),实现了惊人的 10倍效率提升。
● 驱动因素: 这一飞跃主要归功于更好的表示学习和高效的预训练策略,让世界模型能更快、更少地学习和掌握环境动态。
三、迈向通用——多模态融合的标准化
为了应对复杂的真实世界环境,现代世界模型正普遍采用多模态输入的标准化设计,融合了视觉、触觉、本体感受等多种信息流。这种设计是模型从单一任务走向通用智能的必要前提。
控制任务的效率提升
机器人控制任务的评估结果展现了世界模型在数据效率方面的显著进步:
训练效率的飞跃:
● 数据效率从早期的5M训练步数大幅降至500k
● 这一10倍的效率提升主要得益于更好的表示学习和预训练策略
多模态输入的标准化:
现代世界模型普遍采用多模态输入,包括视觉、触觉、本体感受等信息的融合。

在看到了世界模型巨大的潜力和应用前景之后,我们必须正视横亘在通用世界模型(AGI)道路上的三大核心挑战。这些挑战,同时也是下一阶段技术突破的关键命门。
一、数据和评估体系的不完善
当前,世界模型领域面临的首要挑战是:缺乏统一的大规模数据集和标准化评估指标。
● 现状痛点 ([原文表6]总结的局限性):
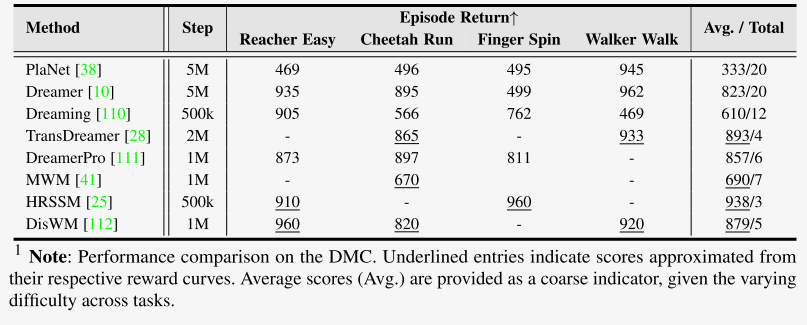
▲原文表6|在DMC基准测试上的性能比较。
○ 数据集碎片化: 难以进行模型间的横向对比。
○ 评估指标偏颇:过度重视像素级保真度,却忽视了更重要的物理一致性和因果推理能力。
○ 真实性差距: 严重依赖仿真数据,与真实世界的鸿沟难以跨越。
● 解决方案探索: 社区正积极推动建立跨域统一数据集(如Embodied AI Foundation),并提出 Physics Consistency Score (PCS) 和 Causal Reasoning Accuracy (CRA) 等新的评估指标。
二、计算效率与模型复杂度的矛盾
高质量的世界建模往往需要复杂的模型架构,但这与实时控制应用对推理速度和能耗的严格要求形成了尖锐的矛盾。
● 核心难题:
○ 高分辨率表示带来的内存占用和推理延迟。
○ 移动机器人等场景的能耗考量。
● 技术路线: 业界正广泛应用模型压缩、知识蒸馏,并探索 MobileViT、EfficientNet 等轻量化架构,力求在精度-效率权衡空间中找到最优解。
三、建模策略的根本性难题
自回归预测与全局预测的权衡,是世界模型设计中始终绕不开的核心难题。
● 关键挑战: 如何在有限资源下准确预测长时序动态变化、如何统一建模多尺度时序耦合,以及如何有效量化和传播预测中的不确定性。
展望未来:世界模型的三大发展方向
面对上述挑战,未来的研究方向也已清晰地浮现,它们将共同推动世界模型迈向通用智能:
1. 混合架构的技术融合:
a. 不再非此即彼,未来的模型将结合自回归和全局预测的优势,实现分层时序建模和适应性策略切换。
2. 评估体系的根本性变革:
a. 评估的重心将从像素级指标彻底转向物理一致性检验和因果推理测试,确保模型是真正理解世界,而非仅仅拟合图像。
3. 数据资源的生态建设:
a. 建立支持大规模预训练的数据生态,包括利用物理仿真器生成合成数据,并建立标准化的真实数据采集流程,为通用世界模型提供坚实的“营养基”。
世界模型的旅程才刚刚开始,技术的融合与评估体系的升级,将是开启通用人工智能时代的关键钥匙。
【最终章】价值、实践与未来:世界模型的宏伟蓝图
世界模型的研究不仅是一场技术的较量,更是一次对通用人工智能理论的系统性贡献和对未来工程实践的实用性指导。
💡 理论框架的系统性贡献:搭起理解之桥
本综述的最大学术价值,在于提出了首个系统性的具身智能世界模型分类框架。
同时,这一框架也具备巨大的方法论价值:它提供了模型设计的指导原则、建立了性能评估的标准化流程,让技术选型不再是盲目的尝试。
🛠️ 工程实践的技术指南:让理论落地
对于产业界的工程实践者而言,这一框架是宝贵的技术选型指导手册:
| 任务类型 | 推荐的技术栈 | 核心优势 |
| 实时控制任务 | 全局潜在向量 + 全局差分预测 | 极致高效,低延迟 |
| 长期规划任务 | 令牌特征序列 + 序列模拟推理 | 精准预测,复杂依赖建模 |
| 空间理解任务 | 空间潜在网格 + 混合时序建模 | 几何精确,时空鲁棒 |
[原文表7] 更进一步,提供了针对不同应用场景的性能优化建议,从架构选择、训练策略到部署优化,为模型的快速落地提供了科学依据。
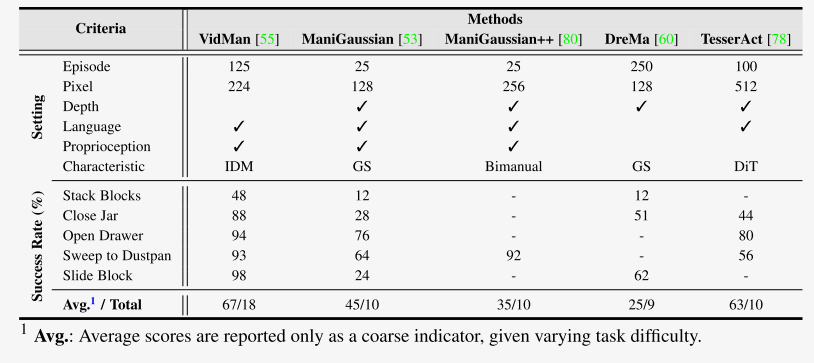
▲原文表7|在RLBench上操作任务的性能比较。
World Model的未来图景:技术融合与社会重塑
世界模型的未来,将是融合与赋能的时代。
一、技术融合的必然趋势
未来的世界模型将是 “全能型选手”:
● 跨模态深化: 深度整合视觉、听觉、触觉,并融入大语言模型带来的强大语义理解能力。
● 物理约束引入: 将物理定律作为设计的重要约束,确保预测在物理上合理,为安全关键应用(如自动驾驶、手术机器人)提供最高保障。
● 分层建模标准化: 采用不同时空尺度的分层建模,同时捕捉微观细节和宏观趋势。
二、应用场景的广阔前景
从实验室到整个社会,世界模型将深刻重塑我们的生活:
● 工业 4.0: 实现智能工厂的全面感知与高效生产调度。
● 智慧城市: 整合交通、能源数据,提供城市级别的决策支持。
● 医疗健康: 为手术机器人提供精确环境建模和风险预测。
三、深远社会影响
它将引发一场教育变革(逼真的虚拟学习环境)和科研加速(高精度仿真加速实验)。当然,随着能力的提升,伦理考量(安全性、可控性、公平性)也将成为不容忽视的社会议题。
结语:迈向具身智能的新纪元
World Model,作为具身智能的**“内部模拟器”和“时空大脑”**,正在以前所未有的速度从实验室走向真实世界。
本综述提出的三维分类框架,不仅为当前技术发展提供了清晰的脉络,更为未来的研究指明了道路。[开源资源库https://github.com/Li-Zn-H/AwesomeWorldModels] 的建立,更是降低了研究门槛,促进了技术标准的统一化。
我们正站在具身智能发展的关键节点。未来的世界模型将不仅仅是技术工具,更是连接虚拟与现实、感知与行动、当下与未来的重要桥梁。在这个充满机遇和挑战的时代,让我们共同见证,AI如何真正迈向具备类人世界理解能力的宏伟目标!
本文基于综述论文《A Comprehensive Survey on World Models for Embodied AI》撰写,旨在为读者提供对世界模型技术的全面理解。更多技术细节和最新进展,请关注相关开源项目和学术会议。