复杂环境下驾驶员注意力实时检测: 双目深度补偿 + 双向 LSTM
《博主简介》
小伙伴们好,我是阿旭。
专注于计算机视觉领域,包括目标检测、图像分类、图像分割和目标跟踪等项目开发,提供模型对比实验、答疑辅导等。
《------往期经典推荐------》
一、AI应用软件开发实战专栏【链接】
| 项目名称 | 项目名称 |
|---|---|
| 1.【人脸识别与管理系统开发】 | 2.【车牌识别与自动收费管理系统开发】 |
| 3.【手势识别系统开发】 | 4.【人脸面部活体检测系统开发】 |
| 5.【图片风格快速迁移软件开发】 | 6.【人脸表表情识别系统】 |
| 7.【YOLOv8多目标识别与自动标注软件开发】 | 8.【基于深度学习的行人跌倒检测系统】 |
| 9.【基于深度学习的PCB板缺陷检测系统】 | 10.【基于深度学习的生活垃圾分类目标检测系统】 |
| 11.【基于深度学习的安全帽目标检测系统】 | 12.【基于深度学习的120种犬类检测与识别系统】 |
| 13.【基于深度学习的路面坑洞检测系统】 | 14.【基于深度学习的火焰烟雾检测系统】 |
| 15.【基于深度学习的钢材表面缺陷检测系统】 | 16.【基于深度学习的舰船目标分类检测系统】 |
| 17.【基于深度学习的西红柿成熟度检测系统】 | 18.【基于深度学习的血细胞检测与计数系统】 |
| 19.【基于深度学习的吸烟/抽烟行为检测系统】 | 20.【基于深度学习的水稻害虫检测与识别系统】 |
| 21.【基于深度学习的高精度车辆行人检测与计数系统】 | 22.【基于深度学习的路面标志线检测与识别系统】 |
| 23.【基于深度学习的智能小麦害虫检测识别系统】 | 24.【基于深度学习的智能玉米害虫检测识别系统】 |
| 25.【基于深度学习的200种鸟类智能检测与识别系统】 | 26.【基于深度学习的45种交通标志智能检测与识别系统】 |
| 27.【基于深度学习的人脸面部表情识别系统】 | 28.【基于深度学习的苹果叶片病害智能诊断系统】 |
| 29.【基于深度学习的智能肺炎诊断系统】 | 30.【基于深度学习的葡萄簇目标检测系统】 |
| 31.【基于深度学习的100种中草药智能识别系统】 | 32.【基于深度学习的102种花卉智能识别系统】 |
| 33.【基于深度学习的100种蝴蝶智能识别系统】 | 34.【基于深度学习的水稻叶片病害智能诊断系统】 |
| 35.【基于与ByteTrack的车辆行人多目标检测与追踪系统】 | 36.【基于深度学习的智能草莓病害检测与分割系统】 |
| 37.【基于深度学习的复杂场景下船舶目标检测系统】 | 38.【基于深度学习的农作物幼苗与杂草检测系统】 |
| 39.【基于深度学习的智能道路裂缝检测与分析系统】 | 40.【基于深度学习的葡萄病害智能诊断与防治系统】 |
| 41.【基于深度学习的遥感地理空间物体检测系统】 | 42.【基于深度学习的无人机视角地面物体检测系统】 |
| 43.【基于深度学习的木薯病害智能诊断与防治系统】 | 44.【基于深度学习的野外火焰烟雾检测系统】 |
| 45.【基于深度学习的脑肿瘤智能检测系统】 | 46.【基于深度学习的玉米叶片病害智能诊断与防治系统】 |
| 47.【基于深度学习的橙子病害智能诊断与防治系统】 | 48.【基于深度学习的车辆检测追踪与流量计数系统】 |
| 49.【基于深度学习的行人检测追踪与双向流量计数系统】 | 50.【基于深度学习的反光衣检测与预警系统】 |
| 51.【基于深度学习的危险区域人员闯入检测与报警系统】 | 52.【基于深度学习的高密度人脸智能检测与统计系统】 |
| 53.【基于深度学习的CT扫描图像肾结石智能检测系统】 | 54.【基于深度学习的水果智能检测系统】 |
| 55.【基于深度学习的水果质量好坏智能检测系统】 | 56.【基于深度学习的蔬菜目标检测与识别系统】 |
| 57.【基于深度学习的非机动车驾驶员头盔检测系统】 | 58.【太基于深度学习的阳能电池板检测与分析系统】 |
| 59.【基于深度学习的工业螺栓螺母检测】 | 60.【基于深度学习的金属焊缝缺陷检测系统】 |
| 61.【基于深度学习的链条缺陷检测与识别系统】 | 62.【基于深度学习的交通信号灯检测识别】 |
| 63.【基于深度学习的草莓成熟度检测与识别系统】 | 64.【基于深度学习的水下海生物检测识别系统】 |
| 65.【基于深度学习的道路交通事故检测识别系统】 | 66.【基于深度学习的安检X光危险品检测与识别系统】 |
| 67.【基于深度学习的农作物类别检测与识别系统】 | 68.【基于深度学习的危险驾驶行为检测识别系统】 |
| 69.【基于深度学习的维修工具检测识别系统】 | 70.【基于深度学习的维修工具检测识别系统】 |
| 71.【基于深度学习的建筑墙面损伤检测系统】 | 72.【基于深度学习的煤矿传送带异物检测系统】 |
| 73.【基于深度学习的老鼠智能检测系统】 | 74.【基于深度学习的水面垃圾智能检测识别系统】 |
| 75.【基于深度学习的遥感视角船只智能检测系统】 | 76.【基于深度学习的胃肠道息肉智能检测分割与诊断系统】 |
| 77.【基于深度学习的心脏超声图像间隔壁检测分割与分析系统】 | 78.【基于深度学习的心脏超声图像间隔壁检测分割与分析系统】 |
| 79.【基于深度学习的果园苹果检测与计数系统】 | 80.【基于深度学习的半导体芯片缺陷检测系统】 |
| 81.【基于深度学习的糖尿病视网膜病变检测与诊断系统】 | 82.【基于深度学习的运动鞋品牌检测与识别系统】 |
| 83.【基于深度学习的苹果叶片病害检测识别系统】 | 84.【基于深度学习的医学X光骨折检测与语音提示系统】 |
| 85.【基于深度学习的遥感视角农田检测与分割系统】 | 86.【基于深度学习的运动品牌LOGO检测与识别系统】 |
| 87.【基于深度学习的电瓶车进电梯检测与语音提示系统】 | 88.【基于深度学习的遥感视角地面房屋建筑检测分割与分析系统】 |
| 89.【基于深度学习的医学CT图像肺结节智能检测与语音提示系统】 | 90.【基于深度学习的舌苔舌象检测识别与诊断系统】 |
| 91.【基于深度学习的蛀牙智能检测与语音提示系统】 | 92.【基于深度学习的皮肤癌智能检测与语音提示系统】 |
| 93.【基于深度学习的工业压力表智能检测与读数系统】 | 94.【基于深度学习的CT扫描图像肝脏肿瘤智能检测与分析系统】 |
| 95.【基于深度学习的CT扫描图像脑肿瘤智能检测与分析系统】 | 96.【基于深度学习的甲状腺结节智能检测分割与诊断系统】 |
二、机器学习实战专栏【链接】,已更新31期,欢迎关注,持续更新中~~
三、深度学习【Pytorch】专栏【链接】
四、【Stable Diffusion绘画系列】专栏【链接】
五、YOLOv8改进专栏【链接】,持续更新中~~
六、YOLO性能对比专栏【链接】,持续更新中~
《------正文------》
目录
- 引言
- 一、研究背景
- 二、核心方法设计:RT-DASR
- (1)模块 1:BV-DHPE(双目视觉深度补偿头部姿态估计)
- (2)模块 2:MSTBi-LSTM(多源时间双向长短期记忆网络)
- 三、实验验证与关键结果
- (1)实验环境与数据集
- (2)关键实验结果
- 四、研究结论与未来方向
引言
为解决现有基于计算机视觉的驾驶员注意力检测方法中,单目相机精度低、多传感器融合实时性差的问题,本文提出RT-DASR(实时驾驶员注意力状态识别方法),其核心包含BV-DHPE(双目视觉深度补偿头部姿态估计) 和MSTBi-LSTM(多源时间双向长短期记忆网络) 两大模块。BV-DHPE 通过双目相机与 YOLO11n Pose 定位面部关键点,利用双目视差计算空间距离补偿单目深度缺陷,使头部姿态估计的平均绝对误差(MAE)较单目方法降低44.7%;MSTBi-LSTM 融合头部姿态角度、实时车速和注视区域语义,双向提取时间特征实现注意力判别。该方法在 NVIDIA Jetson Orin 部署时,注意力识别准确率达90.4%,平均延迟仅21.5 ms,经实际矿用卡车驾驶场景测试,为提升驾驶员安全性提供了高精度、低延迟的解决方案。
一、研究背景
-
交通安全需求:驾驶员分心是交通事故核心诱因,美国 2010 年机动车事故社会成本达 836 亿美元,其中 15% 由分心驾驶导致,因此高效可靠的驾驶员注意力检测方法对提升驾驶安全至关重要。
-
现有方法的局限性:
- 生理信号法:通过 EEG(脑电图)、ECG(心电图)等监测,但依赖接触设备,存在成本高、舒适性差、干扰驾驶操作的问题。
- 驾驶行为法:通过方向盘操作、刹车模式等间接推断注意力,但受交通环境、路况、个人驾驶习惯影响大,泛化性和实时性不足。
- 计算机视觉法:因非侵入、低成本、可扩展性强成为主流,但存在两大缺陷 —— 单目相机缺乏深度信息导致精度低,多传感器融合技术实时性差。
-
场景特殊性:现有研究未适配矿用卡车场景(矿卡体积大、需更广视野、需监控多控制面板),缺乏针对矿卡驾驶员的快速高精度注意力检测技术。
二、核心方法设计:RT-DASR
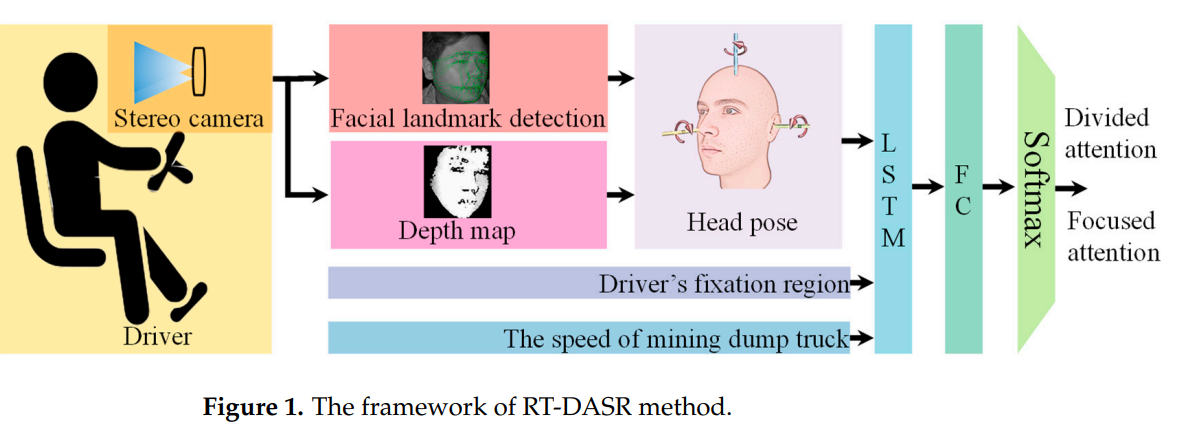
RT-DASR (实时驾驶员注意力状态识别方法)由两大核心模块构成,通过 “高精度头部姿态估计 + 多源时间特征融合” 实现注意力检测,具体设计如下:
(1)模块 1:BV-DHPE(双目视觉深度补偿头部姿态估计)
-
目标:解决单目相机深度信息缺失导致的头部姿态估计精度低问题。
-
硬件配置:双目相机(基线 43mm,焦距 3.5mm),配备 940nm 近红外 LED 补光器,确保低光照环境稳定工作。
-
关键步骤 :
-
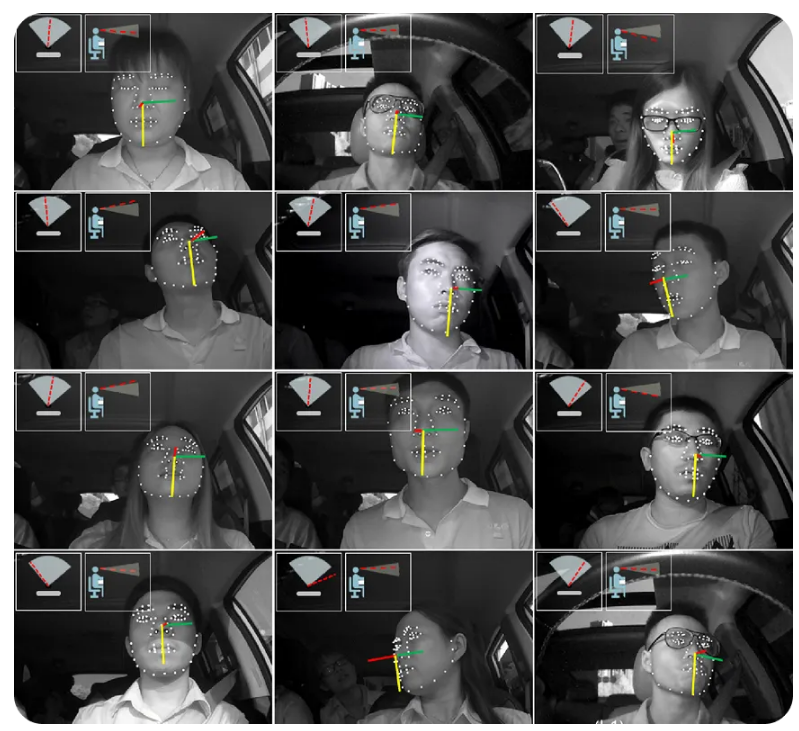
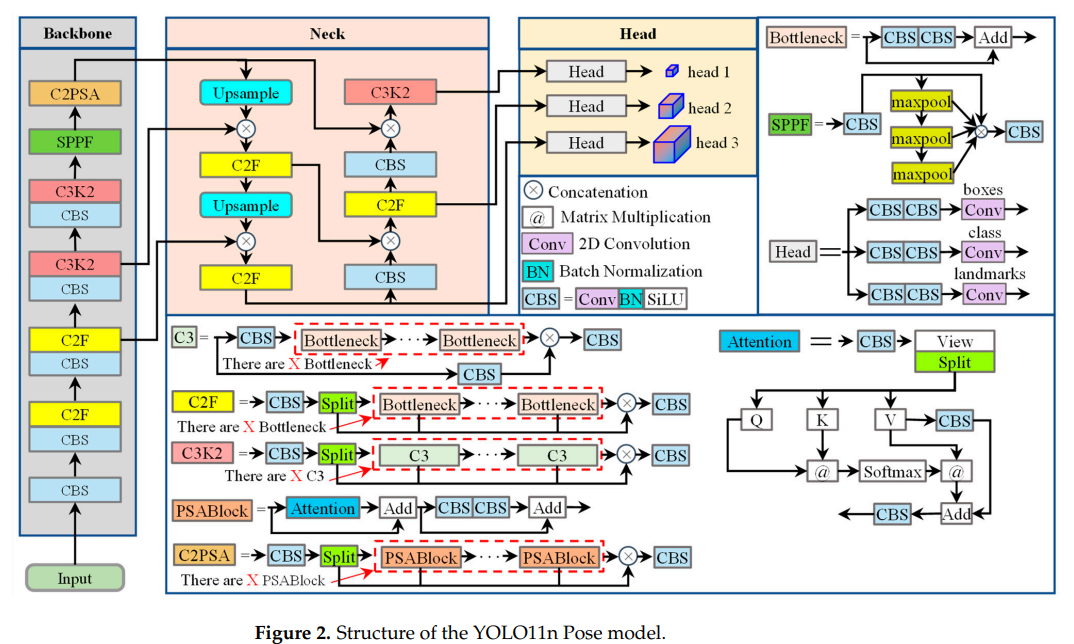
面部关键点定位:采用 YOLO11n Pose 模型,直接回归 17 个面部关键点,筛选 8 个受表情影响小的点(内 / 外眼角、眉外端、鼻孔)作为候选点,避免传统 “人脸检测→关键点定位” 两阶段流程,提升精度与速度。
-
深度计算:基于双目视差原理,通过立体匹配生成视差图,结合公式Z=dfB(f 为焦距,B 为基线,d 为视差)将视差转换为深度,获取候选点的 3D 世界坐标。
-
姿态角提取:利用相机内参矩阵K=f**x000f**y0cxc**y1和外参 [R|t],通过奇异值分解(SVD)求解旋转矩阵 R,再分解 R 得到头部的 3 个欧拉角(俯仰:绕 x 轴;滚转:绕 y 轴;偏航:绕 z 轴)。
-
-
性能优势:头部姿态估计 MAE 较单目方法降低44.7%,极端头部运动时误差更可控(俯仰峰值误差从 12.1°→3.6°,偏航从 9.3°→6.5°)。
(2)模块 2:MSTBi-LSTM(多源时间双向长短期记忆网络)
-
目标:融合多源时序数据,提升注意力状态判别的连续性与准确性。
-
输入特征设计:
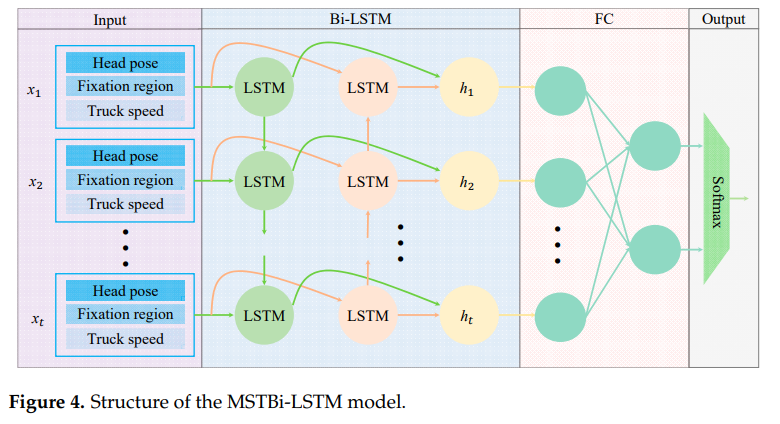
特征类型 维度 说明 头部姿态 3 俯仰、偏航、滚转 3 个欧拉角(归一化后) 注视区域 1 cabin 内 12 个分区(用 1-12 数值表示) 实时车速 1 矿用卡车实时行驶速度 总输入维度 16 —— -
网络结构:
- 双向 LSTM 层:包含前向 LSTM(按时间顺序提取特征)和反向 LSTM(按时间逆序提取特征),捕捉多源数据的长期时间依赖关系,隐藏单元 128 个,序列长度 300。
- 全连接层(FC)+ Softmax:将双向 LSTM 输出拼接后输入 FC 层,再通过 Softmax 分类为 “专注” 或 “分心” 两类。
-
性能优势:多源特征融合后,注意力识别准确率达 93.2%(训练阶段),推理时间仅 0.1ms,兼顾精度与效率。
三、实验验证与关键结果
(1)实验环境与数据集
| 实验类型 | 硬件配置 | 软件配置 | 数据集详情 |
|---|---|---|---|
| 模型训练 | Intel Xeon Silver 4210 + NVIDIA RTX 3090 | Ubuntu 22.04,PyTorch 2.3,CUDA 11.2 | YOLO11n Pose:9798 张图像(6:2:2 分拆);MSTBi-LSTM:5000 个 60s 样本(3000:1000:1000 分拆) |
| 模型部署 | NVIDIA Jetson Orin(边缘设备) | Ubuntu 20.04,JetPack 5.1.4,TensorRT 8.5 | —— |
| 实车测试 | 矿用卡车(配备双目相机) | —— | 40 名司机 1440h 数据(53% 白天,47% 夜间),600 个分心片段 + 3000 个非分心片段 |
(2)关键实验结果
-
YOLO11n Pose 性能(与同类模型对比):
模型 面部检测 AP50-95(%) 关键点检测 AP50-95(%) 参数量(M) 推理时间(ms) YOLOv8n Pose 89.2 93.0 3.3 1.1 YOLO11n Pose 90.7 94.5 2.9 1.1 YOLO12n Pose 89.2 93.1 2.8 1.7 - 结论:YOLO11n Pose 在检测精度(AP50-95 最高)、参数量(2.9M,低于 YOLOv8n)、推理速度(1.1ms,与 YOLOv8n 相当,快于 YOLO12n)上综合最优。
-
BV-DHPE 与单目方法头部姿态估计误差对比:
评估指标 单目方法(俯仰) BV-DHPE(俯仰) 单目方法(偏航) BV-DHPE(偏航) 单目方法(滚转) BV-DHPE(滚转) MAE(°) 2.0 0.8 1.4 1.0 1.1 0.6 RMSE(°) 2.7 0.9 2.0 1.4 1.3 0.8 最大误差(°) 12.1 3.6 9.3 6.5 7.7 3.5 - 结论:BV-DHPE 在所有维度误差均显著降低,MAE 平均下降 44.7%,抗动态干扰能力更强。
-
RT-DASR 实车测试性能(与单目方法对比):
方法 准确率(%) F1 分数 TPR(%) FPR(%) 推理延迟(ms) 单目方法 80.1 80.3 80.4 19.8 18.2 RT-DASR 90.4 92.3 90.7 8.8 21.5 - 结论:RT-DASR 准确率提升 10.3%,FPR 降低 11.0%(减少误报警),虽延迟增加 3.3ms,但 21.5ms 仍满足实时预警需求。
四、研究结论与未来方向
-
核心结论:
- RT-DASR 通过 BV-DHPE 补偿深度信息、MSTBi-LSTM 融合多源时序特征,实现了矿用卡车驾驶员注意力的高精度(90.4%)、低延迟(21.5ms)检测。
- 边缘部署时,FP16 精度仅导致 0.3% 准确率损失,兼顾性能与硬件资源限制。
-
局限性:
- 极端头部旋转时,关键点匹配易失效,导致误判;
- 矿用卡车场景方法难以迁移至普通轿车(视野、监控需求不同);
- 缺乏统一数据集,无法与现有主流方法直接对比。
-
未来方向:采用多相机构建多视图立体视觉系统,覆盖宽角度头部旋转场景,解决关键点缺失导致的姿态估计失效问题。
好了,这篇文章就介绍到这里,喜欢的小伙伴感谢给点个赞和关注,更多精彩内容持续更新~~
关于本篇文章大家有任何建议或意见,欢迎在评论区留言交流!