opencv学习笔记7:对mnist数据集分类
目录
一.概念介绍
1.mnist数据集介绍
(1)训练集(Training Set)
(2)测试集(Test Set)
二.代码讲解
1.加载mnist数据集
(1)打印图像验证
解释(60000,)的含义:
2.取mnist部分样例
3.定义sift特征提取函数
(1)空列表[]可以动态地添加元素,
(2)
(3)features.append(des.mean(axis=0))
为什么取平均值?
4.hog特征函数
4.SVM模型训练与预测
5.打印混淆矩阵
6. 找到预测错误的样本索引(取前5个)
三.总代码
1.网上历程
2.sift特征提取完整代码及结果
3.hog特征提取完整代码及结果
一.概念介绍
1.mnist数据集介绍
MNIST是一个经典的手写数字图像数据集,包含0-9共10类手写数字图片,是机器学习和计算机视觉领域的基础测试数据集。
(1)训练集(Training Set)
训练集是用于训练模型的数据集合。
模型通过学习训练集中样本的特征(如图像的像素值)与标签(如数字“5”)之间的对应关系,不断调整自身参数(比如SVM中的超平面参数、神经网络的权重),从而掌握“识别手写数字”的能力。
例如,MNIST训练集包含60000张手写数字图片及对应标签,模型会从这60000个样本中“学习”数字的形态特征。
(2)测试集(Test Set)
测试集是用于评估模型泛化能力的数据集合。
测试集的样本与训练集独立(即测试样本未参与模型训练),通过让模型对测试集样本进行预测,对比预测结果与真实标签,可判断模型是否真正学会了“识别规律”,而非单纯“记住”训练样本(即避免过拟合)。
例如,MNIST测试集包含10000张手写数字图片及对应标签,用于检验训练好的模型对新的、未见过的手写数字的识别准确率。
简单来说,训练集是模型的“课本”,测试集是模型的“期末考试卷”——用课本学习,用试卷检验学习效果。
二.代码讲解
核心任务:
MNIST数据集---图片提取特征(sift, hog都行)---特征进行机器学习用svm分类器---得到模型之后进行图像分类
1.加载mnist数据集
核心代码就最后一行
import matplotlib.pyplot as plt
from keras.datasets import mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()(1)打印图像验证
import matplotlib.pyplot as plt
from keras.datasets import mnist
(x_train, y_train), (x_test, y_test) = mnist.load_data()
# 查看数据集形状
print("训练集图像形状:", x_train.shape) # 预期输出 (60000, 28, 28)
print("训练集标签形状:", y_train.shape) # 预期输出 (60000,)
print("测试集图像形状:", x_test.shape) # 预期输出 (10000, 28, 28)
print("测试集标签形状:", y_test.shape) # 预期输出 (10000,)plt.imshow(x_train[0], cmap='gray')
plt.title(f"标签:{y_train[0]}")
plt.axis('off')
plt.show()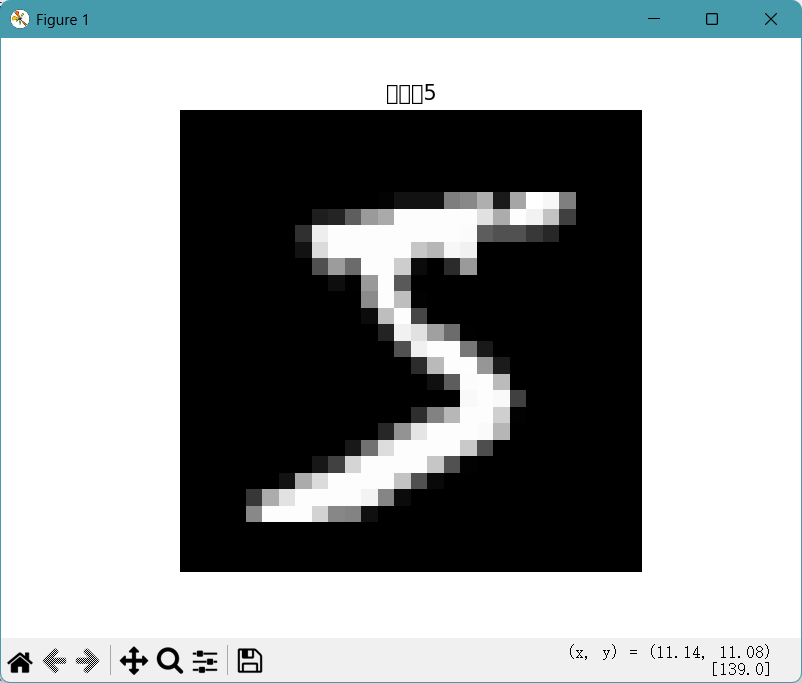
-
import matplotlib.pyplot as plt导入matplotlib库的pyplot模块,并简写为plt。matplotlib是 Python 中常用的绘图库,pyplot模块提供了类似 MATLAB 的绘图接口,用于后续显示图像。 -
from keras.datasets import mnist从 Keras(深度学习框架)的数据集模块中导入mnist数据集。MNIST 是一个经典的手写数字数据集,包含 0-9 的手写数字图片及对应的标签,常用于机器学习入门案例。 -
(x_train, y_train), (x_test, y_test) = mnist.load_data()加载 MNIST 数据集,并按训练集和测试集拆分:x_train:训练集图像数据(用于模型训练)存着6000张28×28的图片y_train:训练集标签(图像对应的数字,0-9)存着6000张图片的数字标签,表示他是数字几x_test:测试集图像数据(用于模型评估)y_test:测试集标签(测试图像对应的数字)
-
print("训练集图像形状:", x_train.shape)打印训练集图像的形状。shape是 NumPy 数组的属性,表示数组的维度。MNIST 训练集包含 60000 张图片,每张图片是 28×28 像素的灰度图,因此输出为(60000, 28, 28)。 -
print("训练集标签形状:", y_train.shape)打印训练集标签的形状。每个图像对应一个标签(0-9),因此 60000 个标签构成一维数组,输出为(60000,)。 -
print("测试集图像形状:", x_test.shape)打印测试集图像的形状。MNIST 测试集包含 10000 张 28×28 的灰度图,输出为(10000, 28, 28)。-
解释
(60000,)的含义: - 在 Python 的 NumPy 数组中,
(60000,)表示这是一个一维数组,数组的长度是 60000。 - 对于多维数组,形状会用多个数字表示维度大小,比如
(60000, 28, 28)表示三维数组,第一个维度长度 60000,第二个 28,第三个 28。 - 而一维数组的形状只需要一个数字来表示长度,但为了保持和多维数组形状表示的一致性(区分单个数字和标量),会在数字后面加一个逗号,所以写成
(60000,)。这里的逗号不是表示有第二个维度,而是用来明确这是一个数组的形状(一维),而非一个单独的数字。
-
-
print("测试集标签形状:", y_test.shape)打印测试集标签的形状。10000 个标签构成一维数组,输出为(10000,)。 -
plt.imshow(x_train[0], cmap='gray')显示训练集中的第一张图像(x_train[0])。imshow是pyplot的图像显示函数,cmap='gray'指定用灰度配色方案(符合 MNIST 灰度图的特性)。 -
plt.title(f"标签:{y_train[0]}")为图像添加标题,显示该图像对应的标签(y_train[0],即第一张图像的数字)。这里使用 f-string 格式化字符串,动态插入标签值。 -
plt.axis('off')关闭图像的坐标轴显示(去除 x 轴和 y 轴的刻度,使图像更简洁)。 -
plt.show()显示绘制的图像窗口,执行后会弹出一个窗口展示第一张 MNIST 图像及对应标签。
2.取mnist部分样例
取mnist训练集的前10000个样本、测试集的前2000个样本,加快代码运算,没什么好说的
# 为加速计算,取部分数据(全量数据训练较慢)
n_train, n_test = 10000, 2000 # 训练集取10000样本,测试集取2000样本
x_train_sub = x_train[:n_train] # 取前10000张训练图像
y_train_sub = y_train[:n_train] # 对应前10000个训练标签
x_test_sub = x_test[:n_test] # 取前2000张测试图像
y_test_sub = y_test[:n_test] # 对应前2000个测试标签3.定义sift特征提取函数
(1)空列表[]可以动态地添加元素,
- 后面for循环我们遍历每一张图像(
for img in images),对每张图像提取 SIFT 特征后,将其特征(通过des.mean(axis=0)计算得到的均值)逐个添加到features列表中。 - 列表的长度会随着图像数量的增加而动态扩展,因此可以存储所有图像的特征。
def extract_sift_features(images):"""提取SIFT特征(取描述子均值作为图像特征)"""sift = cv2.SIFT_create() # 初始化SIFT特征检测器features = [] # 创建一个空列表features,用于存储每张图像提取后的特征向量for img in images: # 遍历每张图像# 检测关键点(kp)和计算描述子(des)kp, des = sift.detectAndCompute(img, None)# 若无关键点(des为None),用0矩阵填充(避免维度不一致)if des is None:des = np.zeros((1, 128)) # SIFT描述子固定为128维# 取所有描述子的平均值作为图像特征(统一特征长度)features.append(des.mean(axis=0))return np.array(features) # 转为numpy数组返回(2)
-
kp, des = sift.detectAndCompute(img, None)对当前图像img执行 SIFT 特征提取:sift.detectAndCompute()是核心方法,第一个参数是输入图像(通常为灰度图),第二个参数是掩码(None表示不使用掩码,处理整幅图像)。- 返回值
kp是图像中检测到的关键点(KeyPoint 对象列表,包含位置、尺度等信息)。 - 返回值
des是关键点对应的描述子(一个二维数组,形状为(N, 128),其中N是关键点数量,128 是每个描述子的固定维度)。
-
if des is None:判断描述子des是否为None。极端情况下(如图像全黑),可能检测不到任何关键点,此时des会为None。 -
des = np.zeros((1, 128)) # SIFT描述子固定为128维若des为None,则用一个(1, 128)的零矩阵填充。这是为了避免后续计算均值时出现错误,同时保证特征维度统一(始终为 128 维)。
(3)features.append(des.mean(axis=0))
des:是 SIFT 特征的描述子,它是一个二维 NumPy 数组,形状通常为(关键点数, 128)(因为 SIFT 描述子是 128 维的)。des.mean(axis=0):mean是 NumPy 的均值计算方法。axis=0表示沿着 “列” 的方向计算均值(即对每一个维度(共 128 维),计算所有关键点在该维度上的平均值)。最终会得到一个形状为(128,)的一维数组,它代表了这张图像所有 SIFT 关键点描述子的 “均值特征”。-
(128,)解释:举例来说,如果你用np.array([1,2,3,4])创建数组,它的形状就是(4,)—— 表示这是一个一维数组,包含 4 个元素。(128,)表示它是一个128长度的一维数组 -
回到 SIFT 特征的场景中,
des.mean(axis=0)的结果是(128,)形状的数组,意味着它是一个128 维的特征向量,每个元素对应 SIFT 描述子中某一维度的平均值。
features.append(...):将这张图像的 “均值特征” 添加到features列表中,以便后续存储所有图像的特征。
为什么取平均值?
有n个关键点的描述子,对128维描述子的每一个维度上的n个数据取平均值,把这一维上的n个数据取平均值变成了1个数据。取平均值的核心目的确实是将图像中多个局部关键点的描述子(一共n个关键点,每个关键点对应一个 128 维向量)聚合为整张图像的全局描述子(一个 128 维向量),好处是节省空间、减少计算量等。
简单来说,这行代码的作用是:对当前图像的所有 SIFT 描述子按维度求均值,得到一个 128 维的 “平均特征”,并将这个特征添加到features列表中。
4.hog特征函数
def extract_hog_features(images):"""提取HOG特征(方向梯度直方图)"""# HOG参数配置(根据MNIST图像尺寸28×28设计)winSize = (28, 28) # 窗口大小(必须与输入图像尺寸一致)blockSize = (14, 14) # 块大小(由细胞单元组成,需能被winSize整除)blockStride = (7, 7) # 块滑动步长(每次移动的像素数,需为cellSize的整数倍)cellSize = (7, 7) # 细胞单元大小(每个细胞的像素尺寸)nbins = 9 # 梯度方向的直方图 bins 数量(0-180度,每20度一个bin)# 初始化HOG特征提取器hog = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins)features = [] # 存储所有图像的特征for img in images: # 遍历每张图像# HOG函数要求输入为3通道图像,将灰度图转为BGR格式(3通道)img_3d = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR)# 计算HOG特征并展平为一维向量hog_feature = hog.compute(img_3d).flatten()features.append(hog_feature)return np.array(features) # 转为numpy数组返回cv2.cvtColor(...):将单通道灰度图(img,形状为(28,28))转换为 3 通道 BGR 图(img_3d,形状为(28,28,3))。- 原因:OpenCV 的
hog.compute()函数默认要求输入图像为 3 通道(即使三个通道内容相同),否则可能报错,因此需要这一步转换。 hog.compute(img_3d)返回一个二维数组(N, 1),而flatten让它变成一维数组N是 HOG 特征的总数量(例如 144,由前面的参数计算得出),表示有N个特征值。1表示这些特征值被组织成1 列,每个特征值单独占一行。
4.SVM模型训练与预测
# 4. SVM模型训练与预测
svm = SVC(kernel='rbf', gamma='scale') # 径向基核SVM
svm.fit(x_train_feat, y_train_sub) # 训练模型
y_pred = svm.predict(x_test_feat) # 测试预测①这个svm实例是一个基于 RBF 核、自动缩放gamma的支持向量机分类器,它通过核函数将数据映射到高维空间,再通过支持向量和最优超平面对样本进行分类
②训练模型
③测试预测:对2000个测试数据分类,看看这些图片是0~9哪个数字。
y_pred的长度与测试集样本数量一致。例如,若x_test_feat包含 2000 张测试图像,y_pred就有 2000 个元素。- 每个元素对应测试集中一张图像的预测类别(与训练时的标签格式一致)。
在 MNIST 手写数字分类任务中,训练时的标签 y_train_sub 是 0-9 的整数(分别代表数字 0 到 9)。因此:y_pred 中的每个元素也是 0-9 之间的整数,表示模型判断该测试图像对应的手写数字是几。
例如:
- 若
y_pred[0] = 5,表示模型预测测试集中第 1 张图像是数字 “5”; - 若
y_pred[100] = 3,表示模型预测测试集中第 101 张图像是数字 “3”。
5.打印混淆矩阵
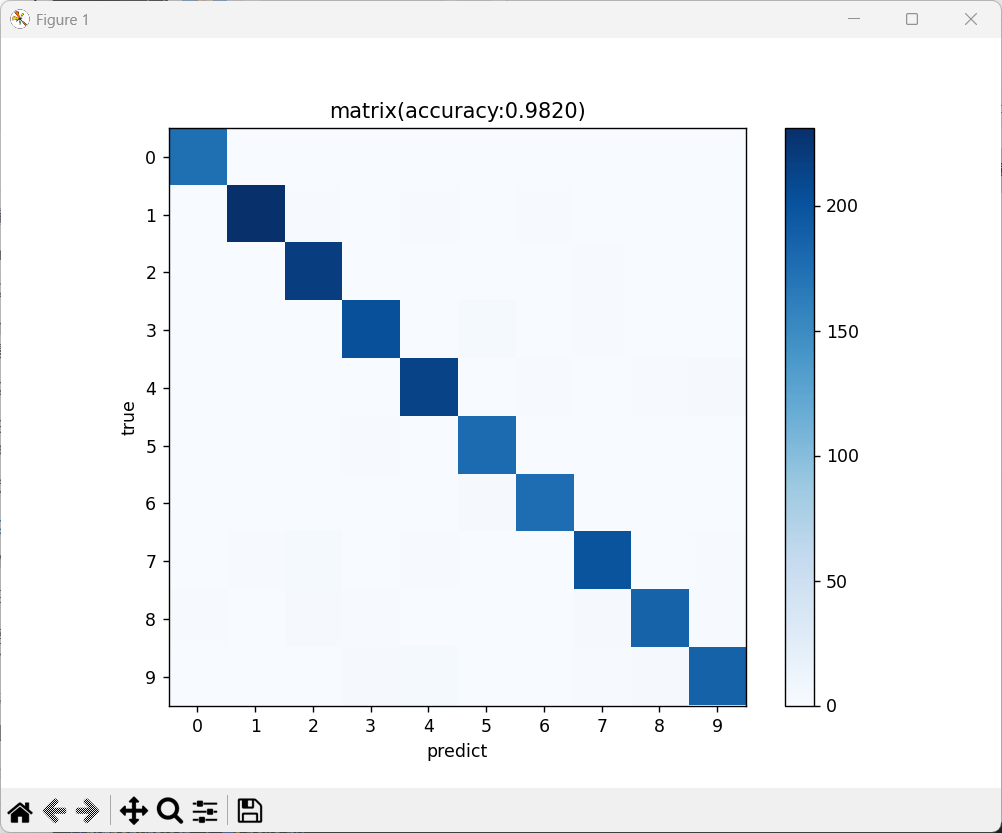
混淆矩阵直观展示哪些数字容易被混淆(如 4 和 9、3 和 5,因形状相似)
confusion_matrix(y_test_sub, y_pred):传入测试集标签和分类后的标签,返回(10,10)的矩阵,cm[i][j]表示真实标签为i的样本被预测为j的数量。
cm = confusion_matrix(y_test_sub, y_pred) # 计算混淆矩阵
plt.figure(figsize=(8, 6))
# 创建8×6英寸的图像,figure用于创建一个图像窗口,所有的绘图元素都会绘制在这个窗口上。
plt.imshow(cm, cmap='Blues') # 用蓝色渐变显示矩阵值(值越大越蓝)
plt.title(f"混淆矩阵 (准确率: {acc:.4f})") # 标题包含准确率
plt.colorbar() # 添加颜色条(指示数值与颜色的对应关系)
plt.xticks(range(10)), plt.yticks(range(10)) # 坐标轴刻度为0-9(数字标签)
plt.xlabel('预测标签'), plt.ylabel('真实标签') # 坐标轴名称
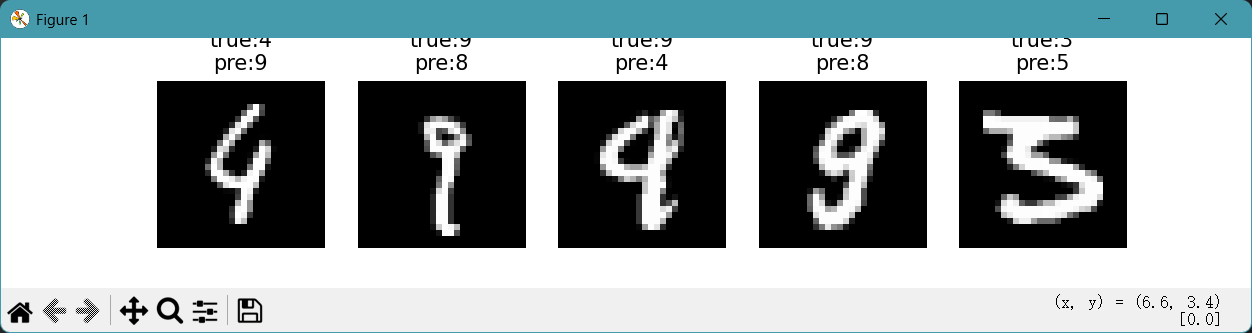
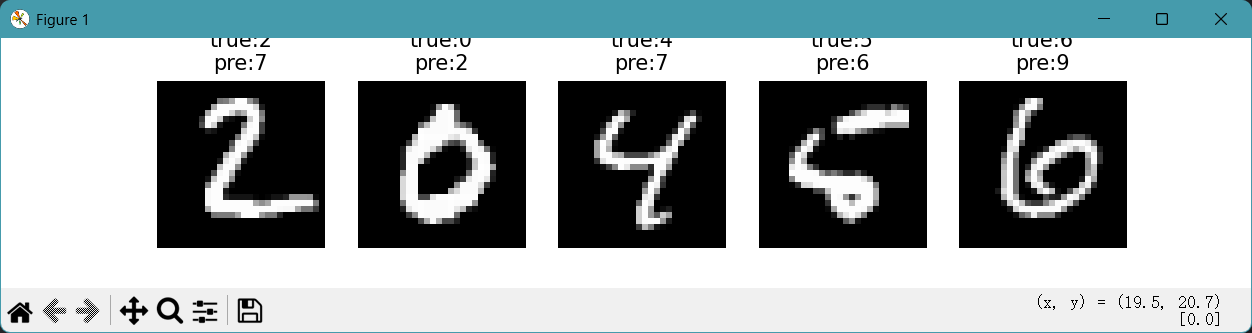
plt.show() # 显示图像6. 找到预测错误的样本索引(取前5个)
y_pred != y_test_sub:逐元素比较 “预测标签” 和 “真实标签”,返回一个布尔数组(True表示预测错误,False表示正确)。np.where(...):根据布尔数组返回 “True所在的位置索引”,结果是一个元组(格式为(array([索引1, 索引2, ...]),))。(array([5, 10, 15]),) #元组里面包含一个数组
[0]:取元组中的第一个元素(即错误样本的索引数组)。例如上面这个元组就是取出array([5, 10, 15])这个数组[:5]:截取前 5 个索引(只看前 5 个错误样本)。取出数组中前五个元素
errors:是一个存储 “错误样本索引” 的数组(比如[10, 25, 33, 47, 52],表示测试集中这 5 个位置的样本预测错误)。
enumerate(errors):对errors进行遍历,每次循环会返回两个值:- 循环计数(从 0 开始):即当前元素在
errors中的索引(比如第 1 次循环是 0,第 2 次是 1,直到 4)。 errors中的元素值:即具体的错误样本索引(比如10、25等)。
- 循环计数(从 0 开始):即当前元素在
# 找到预测错误的样本索引(取前5个)
errors = np.where(y_pred != y_test_sub)[0][:5]
plt.figure(figsize=(10, 2)) # 创建10×2英寸的图像
for i, idx in enumerate(errors): # 遍历错误样本索引plt.subplot(1, 5, i+1) # 1行5列的子图,第i+1个位置plt.imshow(x_test_sub[idx], cmap='gray') # 显示原始图像(灰度图)# 标题显示真实标签和预测标签plt.title(f"真: {y_test_sub[idx]}\n预: {y_pred[idx]}")plt.axis('off') # 关闭坐标轴(减少干扰)
plt.show() # 显示图像三.总代码
1.网上历程
import numpy as np
import matplotlib.pyplot as plt
import cv2
from sklearn.svm import SVC
from sklearn.metrics import accuracy_score, confusion_matrix
from tensorflow.keras.datasets import mnist# 1. 数据加载与预处理
(x_train, y_train), (x_test, y_test) = mnist.load_data()
x_train = x_train.astype(np.uint8) # 转为OpenCV兼容的uint8类型
x_test = x_test.astype(np.uint8)# 为加速计算,取部分数据(全量数据训练较慢)
n_train, n_test = 10000, 2000
x_train_sub = x_train[:n_train]
y_train_sub = y_train[:n_train]
x_test_sub = x_test[:n_test]
y_test_sub = y_test[:n_test]# 2. 特征提取函数定义
def extract_sift_features(images):"""提取SIFT特征(取描述子均值作为图像特征)"""sift = cv2.SIFT_create()features = []for img in images:kp, des = sift.detectAndCompute(img, None) # 检测关键点和描述子if des is None: # 无关键点时用0填充des = np.zeros((1, 128))features.append(des.mean(axis=0)) # 平均描述子作为特征return np.array(features)def extract_hog_features(images):"""提取HOG特征(方向梯度直方图)"""# HOG参数配置winSize = (28, 28) # 检测窗口大小blockSize = (14, 14) # 块大小(2x2细胞)blockStride = (7, 7) # 块步长(1个细胞)cellSize = (7, 7) # 细胞大小nbins = 9 # 方向直方图的区间数hog = cv2.HOGDescriptor(winSize, blockSize, blockStride, cellSize, nbins)features = []for img in images:img_3d = cv2.cvtColor(img, cv2.COLOR_GRAY2BGR) # 转为3通道(HOG函数要求)hog_feature = hog.compute(img_3d).flatten() # 计算并展平特征features.append(hog_feature)return np.array(features)# 3. 提取特征(二选一或全跑,HOG效果更好)
# x_train_feat = extract_sift_features(x_train_sub)
# x_test_feat = extract_sift_features(x_test_sub)
x_train_feat = extract_hog_features(x_train_sub)
x_test_feat = extract_hog_features(x_test_sub)# 4. SVM模型训练与预测
svm = SVC(kernel='rbf', gamma='scale') # 径向基核SVM
svm.fit(x_train_feat, y_train_sub) # 训练模型
y_pred = svm.predict(x_test_feat) # 测试预测# 5. 结果评估与可视化
# 计算准确率
acc = accuracy_score(y_test_sub, y_pred)
print(f"分类准确率: {acc:.4f}")# 混淆矩阵可视化
cm = confusion_matrix(y_test_sub, y_pred)
plt.figure(figsize=(8, 6))
plt.imshow(cm, cmap='Blues')
plt.title(f"混淆矩阵 (准确率: {acc:.4f})")
plt.colorbar()
plt.xticks(range(10)), plt.yticks(range(10))
plt.xlabel('预测标签'), plt.ylabel('真实标签')
plt.show()# 错误案例展示
errors = np.where(y_pred != y_test_sub)[0][:5] # 取前5个错误样本
plt.figure(figsize=(10, 2))
for i, idx in enumerate(errors):plt.subplot(1, 5, i+1)plt.imshow(x_test_sub[idx], cmap='gray')plt.title(f"真: {y_test_sub[idx]}\n预: {y_pred[idx]}")plt.axis('off')
plt.show()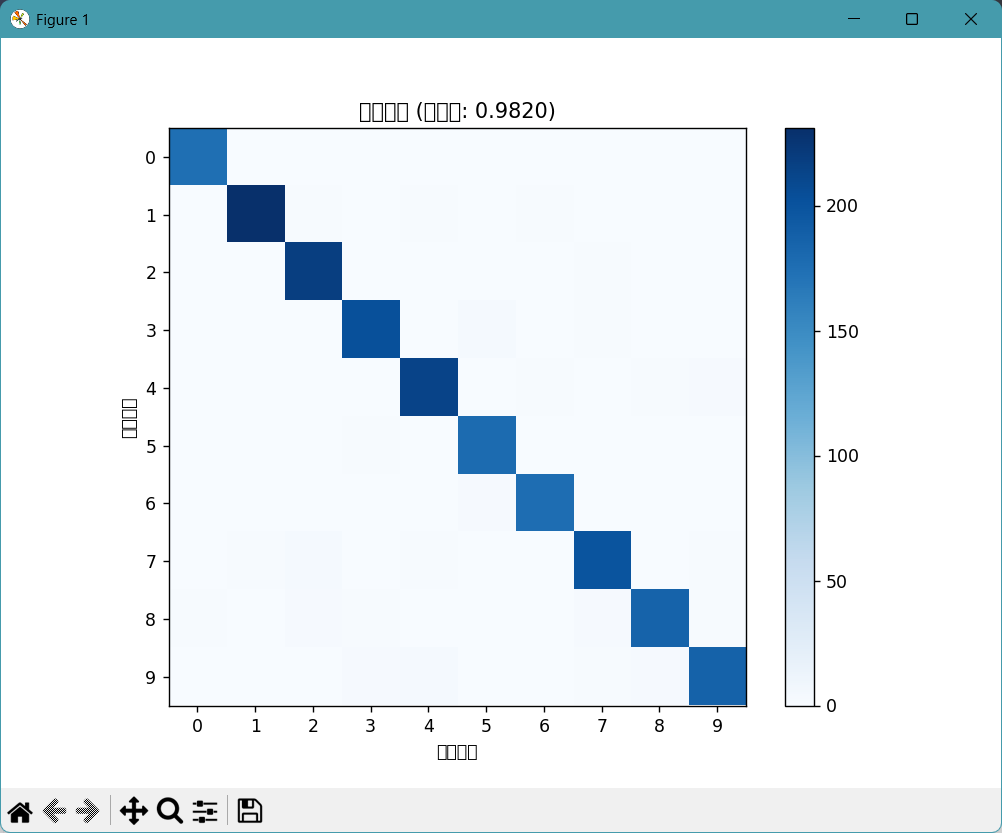
2.sift特征提取完整代码及结果
import cv2
import numpy as np
import matplotlib.pyplot as plt
from sklearn.svm import SVC
from keras.datasets import mnist
from sklearn.metrics import accuracy_score,confusion_matrix(x_train,y_train),(x_test,y_test)=mnist.load_data()
x_train=x_train.astype(np.uint8)
x_test=x_test.astype(np.uint8)n_train,n_test=10000,2000
x_train_sub=x_train[:n_train]
y_train_sub=y_train[:n_train]
x_test_sub=x_test[:n_test]
y_test_sub=y_test[:n_test]#特征提取
def extract_sift_features(images):sift=cv2.SIFT_create()features=[]for img in images:kp,des=sift.detectAndCompute(img,None)if des is None:des=np.zeros((1,128))features.append(des.mean(axis=0))return np.array(features)x_train_feat=extract_sift_features(x_train_sub)
x_test_feat=extract_sift_features(x_test_sub)
#svm分类
svm=SVC(kernel='rbf',gamma='scale')
svm.fit(x_train_feat,y_train_sub)
y_pred=svm.predict(x_test_feat)#结果评估
acc=accuracy_score(y_test_sub,y_pred)
print(f"分类准确率:{acc:.4f}")
#混淆矩阵
cm=confusion_matrix(y_test_sub,y_pred)
plt.figure(figsize=(8,6))
plt.imshow(cm,cmap='Blues')
plt.title(f"matrix(accuracy:{acc:.4f})")
plt.colorbar()
plt.xticks(range(10)),plt.yticks(range(10))
plt.xlabel('predict'),plt.ylabel('true')
plt.show()#错误案例展示
errors=np.where(y_pred!=y_test_sub)[0][:5]
plt.figure(figsize=(10,2))
for i,idx in enumerate(errors):plt.subplot(1,5,i+1)plt.imshow(x_test_sub[idx],cmap='gray')plt.title(f"true:{y_test_sub[idx]}\npre:{y_pred[idx]}")plt.axis('off')
plt.show()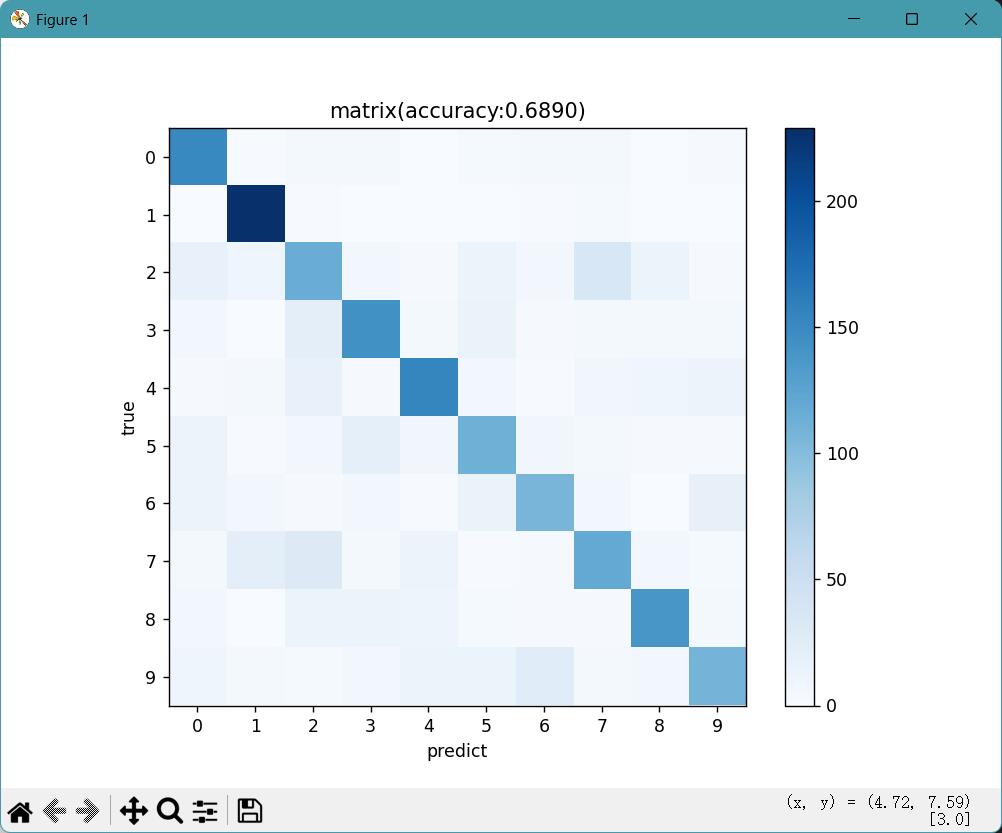
3.hog特征提取完整代码及结果
import cv2
import numpy as np
import matplotlib.pyplot as plt
from sklearn.svm import SVC
from keras.datasets import mnist
from sklearn.metrics import accuracy_score,confusion_matrix(x_train,y_train),(x_test,y_test)=mnist.load_data()
x_train=x_train.astype(np.uint8)
x_test=x_test.astype(np.uint8)n_train,n_test=10000,2000
x_train_sub=x_train[:n_train]
y_train_sub=y_train[:n_train]
x_test_sub=x_test[:n_test]
y_test_sub=y_test[:n_test]def extract_hog_features(images):winSize=(28,28)blockSize=(14,14)blockStride=(7,7)cellSize=(7,7)nbins=9hog=cv2.HOGDescriptor(winSize,blockSize,blockStride,cellSize,nbins)features=[]for img in images:img_3d=cv2.cvtColor(img,cv2.COLOR_GRAY2BGR)hog_feature=hog.compute(img).flatten()features.append(hog_feature)return np.array(features)
# x_train_feat=extract_sift_features(x_train_sub)
# x_test_feat=extract_sift_features(x_test_sub)
x_train_feat=extract_hog_features(x_train_sub)
x_test_feat=extract_hog_features(x_test_sub)
#svm分类
svm=SVC(kernel='rbf',gamma='scale')
svm.fit(x_train_feat,y_train_sub)
y_pred=svm.predict(x_test_feat)#结果评估
acc=accuracy_score(y_test_sub,y_pred)
print(f"分类准确率:{acc:.4f}")
#混淆矩阵
cm=confusion_matrix(y_test_sub,y_pred)
plt.figure(figsize=(8,6))
plt.imshow(cm,cmap='Blues')
plt.title(f"matrix(accuracy:{acc:.4f})")
plt.colorbar()
plt.xticks(range(10)),plt.yticks(range(10))
plt.xlabel('predict'),plt.ylabel('true')
plt.show()#错误案例展示
errors=np.where(y_pred!=y_test_sub)[0][:5]
plt.figure(figsize=(10,2))
for i,idx in enumerate(errors):plt.subplot(1,5,i+1)plt.imshow(x_test_sub[idx],cmap='gray')plt.title(f"true:{y_test_sub[idx]}\npre:{y_pred[idx]}")plt.axis('off')
plt.show()