Physical AI:赋能工业运营中的新一代生产力和生产关系
序言
Kiva Allgood | 世界经济论坛董事总经理
Daniel Kuepper | BCG董事总经理兼高级合伙人
在全球压力不断加剧的背景下——包括经济波动、地缘政治动荡、供应链日益复杂,以及劳动力与人才短缺——工业运营正迈入一个变革性的新阶段。尽管这些挑战并非前所未有,但日益加剧的不确定性已显著放大其影响,迫使企业从根本上重新思考工作的组织、执行与规模化方式。
在此关键转折点,一个由Physical AI驱动的工业自动化新时代正在兴起。这些智能机器人系统融合了perception、reasoning与action能力,实现了前所未有的自主性与适应性,标志着工业自动化发展的一个关键节点。通过连接数字世界与物理世界,物理AI有望重塑工业系统的运行方式——从工厂车间到整个供应链。
随着物理AI日益具备可行性并成为战略必需,行业领导者正迫切寻求更深入的理解,以把握如何利用这些创新实现可持续的长期竞争力。值此关键时刻,本白皮书——由世界经济论坛Next Frontier of Operations倡议与BCG合作开发——延续了战略前瞻与多方利益相关者协作的传统,旨在勾勒一条大胆前行的路径。
本文所呈现的洞见源自全球制造商、机器人技术革新者及顶尖学术专家的集体经验。这些见解植根于真实世界的应用案例,并更重要的是,植根于这些案例所代表的转型历程。本白皮书探讨了物理AI如何重塑运营模式、催生全新的人机协作形式,并在规模化层面释放生产力。
然而,这场转型并不仅关乎技术。它同样要求工业劳动力掌握新技能,以与智能系统协同工作,并承担新兴角色。我们诚邀所有利益相关方——包括制造商、政策制定者、研究人员与技术专家——共同参与这一议程。唯有通过大胆而协调的行动,我们才能共同塑造一个未来:让智能自动化推动包容性、韧性与可持续的工业增长。
执行摘要
技术突破正在不断拓展自动化的边界——那些曾经因变化过大或成本过高而难以自动化的任务,如今在技术上已可行,在经济上也具备了可行性。
尽管传统工业机器人是自动化的基石,但长期以来受限于适应性不足和高昂的集成成本。如今,世界正迈入一个由先进硬件、AI与视觉系统融合驱动的、以智能与灵活性为特征的机器人新纪元。这些进步共同开启了机器人技术的下一个前沿。
诸如训练方法(强化学习、模仿学习)和面向机器人的multimodal foundation models,以及灵巧的硬件组件(例如软体夹爪、触觉传感器),正使机器人能够应对任务变异性、在具体情境中进行推理,并实现实时自适应。通过虚拟训练和直观界面等简化的部署方式,显著缩短了实现价值的时间,并使中小型企业(SMEs)和物流服务商也能广泛采用机器人技术。本文中,manufacturers一词作为简称,泛指制造商与物流服务商。
上述进展催生了未来工业运营中将共存的三大基础机器人系统,共同构成分层的自动化战略。这些系统互为补充,各自适用于特定的任务复杂度、变异性与作业量组合:
Rule-based robotics:在结构化、重复性任务中(如汽车焊接)提供无与伦比的速度与精度;
Training-based robotics:通过强化学习或模仿学习掌握变异性任务(如自适应套件装配);
Context-based robotics:具备zero-shot learning能力,可在不可预测的流程和新环境中执行任务(例如,机器人通过自然语言接收指令、推理并采取行动)。
自动化正在拓展整个工业价值链的机遇。先行者已取得显著成效。例如,亚马逊运营着全球规模最大的机器人集群,通过整合移动机器人、基于AI的分拣系统以及生成式AI引导的机械臂,显著提升了履约中心的绩效。通过协同调度这些自主系统,新一代设施实现了交付速度提升25%、高技能岗位增加30%,以及整体效率提高25%³。同样,Foxconn应用AI驱动的机器人与digital twin仿真技术,成功自动化了此前被认为过于复杂的高精度任务,如螺丝锁付和线缆插接。借助实时自适应力控与基于仿真的部署,其部署时间缩短了40%,运营成本降低了15%。
然而,要大规模实现此类成果,仅靠尖端技术远远不够。它还需要一套面向未来的自动化战略,涵盖技术和组织双重基础:
将新兴的AI技术栈嵌入现有工业工具链,并在机器人、AI与制造领域建立生态系统合作伙伴关系,以确保互操作性、可扩展性与持续创新;
通过reskilling与upskilling推动劳动力转型,促进人机协作,并为员工胜任新兴角色(如机器人监督员、AI训练师和系统优化师)做好准备。
如今就采取行动、将机器人技术作为战略资产进行布局的制造商,将引领工业竞争力的下一阶段——共同塑造一个以智能自动化为可持续增长、员工赋能和系统韧性基石的未来。
1)多模态基础模型:指能够处理和融合多种输入模态(如图像、文本、声音等)的通用AI模型,用于提升机器人对复杂环境的理解与决策能力。
2)零样本学习:指模型在未经过特定任务训练的情况下,仅凭指令或上下文即可执行新任务的能力。
引言
制造商必须立即拥抱智能机器人技术
当今的制造商正站在一个十字路口。持续的劳动力短缺、不断攀升的成本压力,以及脆弱的全球供应链——在地缘政治与市场不确定性的放大下——正共同威胁着企业的生产力、盈利能力和韧性。与此同时,消费者对速度、个性化和可持续性的期望日益提高,要求企业在运营灵活性上实现质的飞跃。
这些日益加剧的压力正加速推动企业通过前沿技术寻求变革性创新。其中,机器人技术正处于深刻转型的最前沿。机器人不再局限于实现孤立的效率提升,而是正成为构建韧性与竞争力的战略推动力。机器人技术正迈入一个新时代——在这一时代,智能赋予机器自主性,而physical AI重新定义了机器(进而也重新定义了人类)的能力边界。
过去:少数人的机器人——僵化、静态
自20世纪60年代首次部署以来,工业机器人已重塑了制造业。它们在汽车和电子等高产量、标准化生产的行业中发挥了关键作用,其投资回报在这些场景中得以充分体现。然而,其应用长期局限于拥有高度标准化生产流程的大型企业。中小型企业(SMEs)以及运营具有高度变异性的企业,因成本高昂、系统复杂且缺乏灵活性而被排除在外。
当下与未来:智能机器人赋能智能时代
但这一局面正在改变。机器人正演变为具备学习、适应和自主行动能力的智能系统。这一转变标志着自动化历史上的一个关键节点,由机器人硬件、AI与视觉系统的融合所驱动。
如今,机器人技术正在快速规模化。截至2023年,全球已部署超过400万台工业机器人⁴。与此同时,机器人软硬件的进步正不断拓展其能力边界——从灵巧操作到自主导航——并大幅降低部署所需的工程投入。创新正在加速涌现:初创企业活动与投资激增,背后正是物理AI的巨大潜力。从面向机器人的基础模型(如SKILD AI、Covariant、DeepMind、TRI),到通用型机器人(例如Figure、Neura、Boston Dynamics和Apptronik推出的人形机器人),创新管线中的成果正加速落地。
随着变革步伐不断加快,领导者面临一系列关键问题:哪些技术突破正在推动这一转变?机器人技术如何已在重塑制造运营、劳动力角色和产业竞争力?又该如何构建技术和人才基础,为未来做好准备?
本白皮书及时而深入地审视了工业运营中机器人技术格局的快速演变。它超越表面趋势,通过真实世界的应用案例,前瞻性地描绘了物理AI如何赋能灵活、韧性且可扩展的自动化。本文为制造商、技术领导者和政策制定者提供了切实可行的洞见,旨在成为引领——而非追随——Intelligent Age的战略指南。
新进展:智能机器人领域的突破
技术突破正在将自动化的范围扩展至此前在技术上不可行或经济上不可行的领域,并通过简化实施流程,实现可扩展的end-to-end自动化。
机器人技术格局正经历一场由近期突破所驱动的深刻变革。本节概述了此次变革的主要维度,这些维度共同标志着工业自动化的一个转折点。
1.1 技术突破重新定义机器人能力
软硬件领域的最新创新带来了机器人能力的跨越式提升,使机器人能够在动态环境中执行复杂任务,同时实现更简化的部署。借助GPUs加速计算所推动的AI与复杂仿真技术的进步,如今已能在实时运行AI模型与算法,从而解锁全新应用场景。这种基于AI的方法聚焦于赋予机器人在复杂现实场景中perceive、plan与act的能力,实质上实现了某种形式的physical intelligence。

增强的感知能力
传感器与AI的进步显著提升了机器人对周围环境的感知能力。价格合理的高分辨率摄像头、LiDAR以及新一代触觉传感器等设备,为机器人提供了更丰富的原始输入;同时,由深度学习驱动的先进计算机视觉算法,使机器人的视觉感知能力接近人类水平。如今,机器人能够实时识别并理解复杂环境——包括识别物体、判断其三维朝向,并评估其物理属性——这些是理解如何与物体交互的关键前提。这些进展使机器人能够以前所未有的清晰度“看见”并理解物体及其所处环境。
自主决策与规划
AI与软件的创新使机器人能够在实时做出智能决策。机器人不再依赖僵化的预编程,而是通过reinforcement learning和仿真,在虚拟环境中以试错方式学习行为策略。先进的仿真器(例如高保真物理仿真器)和域随机化技术(例如对光照、摩擦等参数进行随机化)正在弥合仿真与现实之间的差距,使在仿真中习得的行为能够无缝迁移到真实机器人上。此外,机器人越来越多地受益于强大的foundation models,这些模型融合了视觉、语言与动作能力。例如Google DeepMind的Gemini Robotics⁶和Nvidia的Isaac GR00T⁷等模型,能够接收多模态输入并生成与任务匹配的输出,从而实现直观的人机交互和更优越的情境理解。这使得机器人能够进行稳健的工作流规划:给定一个目标(例如卸载一批货物),系统可自动规划一系列有序动作(如使用叉车卸货、剪断捆扎带、打开包装等)。这一演进使机器人从执行孤立动作迈向完成连贯的多步骤任务,逐步接近人类级别的任务直觉与规划能力。本质上,机器人如今能够以此前无法企及的灵活性和情境感知能力“思考”并规划任务。
灵巧操作与移动能力
材料、执行器和机器人设计的进步极大拓展了机器人在物理层面可执行的动作范围。硬件突破——从高精度力控电机到soft robotic grippers——显著提升了机器人的操作灵巧度。如今,机器人能够可靠地抓取不规则或易损物品,而不再局限于刚性、预设的动作模式。这一能力还辅以AI驱动的控制软件,可实时调节抓取力度与接触力。尤其值得注意的是,现代触觉传感器赋予机器人“触觉”,成为实现类人灵巧操作的关键——通过感知压力与滑动反馈,机器人能够精细操控物体。此外,电池续航能力的提升显著延长了移动机器人的运行时间,支持更高程度的自主部署,从而拓展其移动范围。同时,机器人也不再局限于传统形态。quadrupeds、humanoids、mobile manipulators及混合形态等创新不断涌现,大幅拓宽了工业应用场景,扩大了可行自动化的边界。这些物理层面的创新使机器人能够以更高超的技能和更强的自主性“作用于”现实世界。
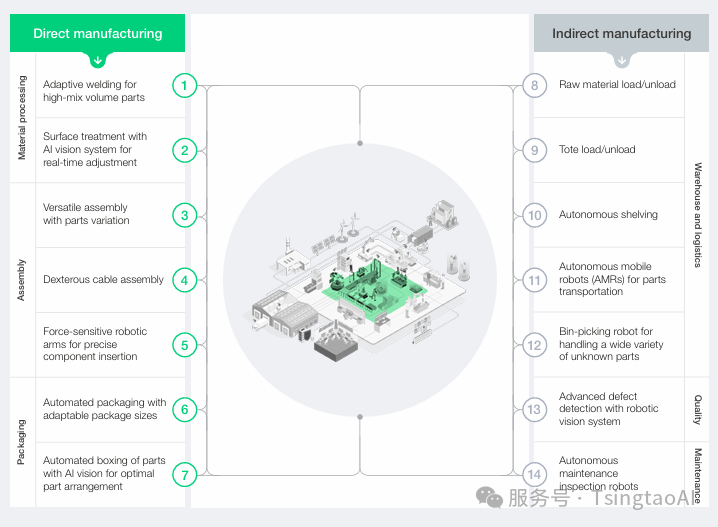
物理AI显著拓展了工业运营中的自动化范围
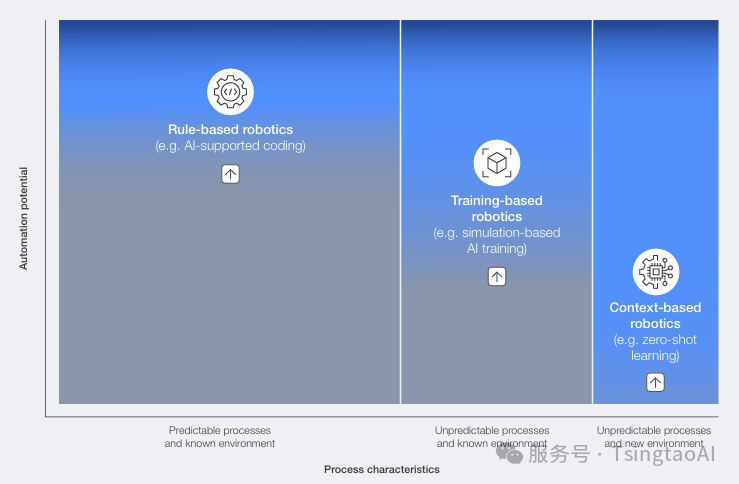
如何解读本图表
图表区域描绘了工厂或仓库内的物理任务(例如装配步骤、物料搬运、包装等)。
这些任务沿两个维度进行分类:自动化潜力(纵轴)通过颜色深浅表示:
1)灰色:当前已可通过rule-based robotics实现自动化的任务
2)蓝色:由physical AI解锁的新增自动化范围
3)深蓝:预计在短期内仍将保持人工操作的代表性比例
流程特性(横轴)由诸如物体位置、朝向和尺寸等参数定义,并取决于系统是在已知环境还是新环境中运行。
不同流程特性下的典型目标状态如下:
可预测流程:参数恒定,或仅在严格受控范围内变化——无需自适应行为即可实现确定性、可重复的执行。
不可预测流程:参数显著变化或无法预知。
新环境:场景、布局、物体或任务超出了机器人训练数据的分布范围(例如不同的生产线、不熟悉的零部件或变更后的仓库布局)。
而在底层,DORA等中间件正在成为多智能体编排的坚实骨架。DORA被设计为一种低延迟、可组合、分布式的数据流框架,将应用程序建模为有向图或“管道”,用于简化AI机器人应用的创建。它通过共享内存和Apache Arrow格式实现节点间的零拷贝通信,解决了传统机器人ROS2在处理大规模数据包时的高延迟问题。这种基础设施的出现,为上层Agent编排提供了实时、高效的数据流能力。
1.2 流程特性决定了应采用哪种机器人系统
Rule-based robotics在结构化环境、重复性任务和可预测流程中,依然提供无与伦比的精度与cycle-time性能。这类系统广泛应用于汽车车身车间等场景,在一致性要求高、变异性低的作业中仍不可或缺。编程界面的持续改进以及AI辅助编码技术(例如西门子推出的Industrial Copilot,利用生成式AI辅助可编程逻辑控制器[PLC]编程)⁹,正在拓展其适用范围并缓解部署难题。
Training-based robotics在变异性更高的环境中日益凸显其价值。依托先进的reinforcement learning算法与仿真技术,这类机器人通过虚拟和现实世界的训练积累经验。训练的虚拟化大幅降低了部署成本——机器人可在仿真环境中完成训练与验证后再投入实际应用,从而扩大了经济可行的自动化范围。它们在涉及可控变异性的任务中展现出强大韧性,例如柔性零部件套件装配(flexible parts kitting)或adaptive logistics,并日益适用于中等产量或非重复性生产场景——这些场景中,基于规则的机器人因缺乏灵活性而难以胜任。
Context-based robotics代表了最新前沿,它利用robotics foundation models和zero-shot learning,在陌生场景中自主完成感知、推理与行动。这类系统能够理解高层级指令,并在无需特定任务训练的情况下应对现实世界的复杂性,因此在包含未知零部件或新环境的不可预测场景中尤为宝贵。机器人基础模型构成了其认知核心,使基于情境的通用型机器人(如人形机器人)能够灵活执行跨环境的多样化任务,而无需重新编程。
尽管基于规则、基于训练和基于情境这三类系统共同构成了一种分层的自动化战略,但它们的边界常常相互重叠,单个机器人亦可采用融合三者的混合方法。例如,在一个协作式装配工位中,机器人可能首先遵循基于规则的逻辑执行高精度任务;同时,它通过感知系统持续监测环境。一旦工作流出现偏差——如零部件缺失或人工介入——机器人便会切换至基于情境的推理模式,自主理解当前状况并解决问题,随后再回到基于规则的执行流程。
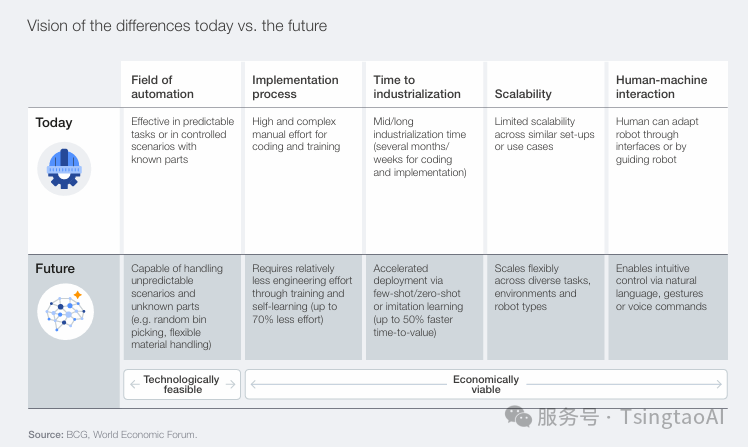
尽管技术进步正在解锁以往无法实现的应用,但真正的转变不仅在于如今哪些任务在技术上可行,更在于哪些任务在经济上变得可行。如图2所示,智能机器人技术的未来特征在于部署的简化和更直观的human–machine interaction,从而显著缩短实施周期并提升可扩展性。随着physical AI支持更广泛的作业类型,并且部署变得更加简便——所需专业技能更少、任务定制化程度更低——自动化在更广泛的运营场景中变得经济可行。这一演进不仅催生了全新的应用场景,更重新定义了自动化的整体经济逻辑。
VLA模型正迅速发展,成为一条极具前景的技术路径,其中foundation models有望解锁可泛化的空间推理能力。
1.3 尚待解决的局限性
尽管技术持续快速进步,但在未来几年,数据稀缺、3D空间智能和灵巧性仍是亟待解决的关键挑战:
数据稀缺:LLMs之所以蓬勃发展,得益于能够从互联网抓取海量数据——这些模型已“阅读”大量网站并吸收众多书籍内容。physical AI同样依赖高质量数据,但经过整理的机器人数据集仍十分有限且成本高昂,因为这类数据必须在现实世界中采集。这一挑战正通过synthetic data generation技术的突破迅速缓解。逼真的photorealistic rendering与domain randomization可在虚拟环境中模拟多变的光照、纹理和物体形状,从而训练机器人在多样化的现实条件下抓取物品。结合开源协作以及现实世界机器人集群的加速部署,这些进展有望弥合数据鸿沟,并大幅提升学习效率。例如,作为初步尝试,Sanctuary AI¹⁰等机器人公司采用teleoperation方式——由操作员远程控制一台或多台机器人——同时收集数据,目标是利用这些数据训练机器人在未来实现自主运行。开发者还可借助Nvidia等公司提供的技术,基于真实或合成数据生成大量合理的情境变体,作为以真实物理为基础的自动化数据倍增器。
3D空间智能:数据稀缺是导致机器人在复杂3D环境中进行感知、推理和交互仍具挑战性的主要原因之一。然而,相关进展正在加速。World Labs、Covariant等初创企业以及学术领军团队正通过仿真、现实世界数据与多模态AI架构,推动稳健的空间理解能力发展。VLA模型正迅速演进为一条极具前景的技术路径,而foundation models有望解锁可泛化的空间推理能力。
高自由度下的可泛化灵巧性:实现类人灵巧操作仍是前沿难题,受限于机械结构、感知能力和计算资源。例如,机器人手部通常需具备高自由度(DoF)——往往超过20个关节——这使得实时运动规划、力控与避障变得极为复杂。关键在于,3D空间智能的进步是实现灵巧性的前提:精细操作依赖于对物体几何形状、pose及occlusions的精确感知。能够将3D场景理解与操作规划相结合的基础模型,将使机器人更有效地选择稳定抓取点、适应物体变异,并在环境变化时执行纠偏策略。
尽管机器人技术不断进步,突破持续拓展能力边界,但要实现可持续的大规模应用,仍需积极应对新兴挑战。其中,cybersecurity是亟需关注的重点领域。随着工厂和仓库日益软件定义化,机器人系统之间互联互通程度不断提高,其遭受网络威胁的脆弱性也随之上升。因此,建立强有力的网络安全防护措施,对于防范潜在运营中断和数据泄露至关重要。
实际应用:前沿案例
智能机器人正在赋能所有制造领域和行业中的应用场景,先行者已开始重塑其运营模式。
随着智能机器人技术从一项小众能力演变为工业竞争力的核心驱动力,其应用正加速扩展至各行各业、各类职能以及不同规模的企业。
新一代机器人系统如今已能应对曾经看似超出自动化能力范围的复杂、多变且需要灵巧操作的任务。
本节探讨了新兴应用场景的广度,涵盖整个工业价值链,并重点展示先行者如何重新定义自动化所能实现的边界。
2.1 重塑制造价值链
如今的智能机器人已不再局限于孤立的高产量任务,而是正在自动化整个制造价值链中的广泛作业——从物料加工、精密装配,到包装、intralogistics、质量检测和设备维护。这些能力并非理论构想,而是真实、具体且正在重新定义自动化可能性的实践。
跨行业来看,physical AI正在解锁新一代高影响力的应用(见图3)。在直接制造环节,adaptive welding、force-sensitive insertion和cable routing等创新仅是新前沿的几个例证。值得注意的是,智能机器人也在推动间接制造环节的进步,例如仓储物流和巡检作业,通常通过AMRs或hybrid embodiments实现。
图3:贯穿整个工业价值链的典型physical AI应用案例
物理AI如何重塑工厂与仓库运营
这一波创新凸显了一个更广泛的趋势:部署应用正临近临界点。如今,显著的效益不仅出现在高产量、低变异性的行业,也出现在高变异、低产量的环境中。最有望从中受益的行业包括食品饮料、金属加工、物流以及广义的离散制造业。大多数制造企业都是中小型企业(SMEs),它们与大型企业一样,将获得显著收益。随着高初始投资和total cost of ownership等壁垒持续降低,中小企业实现转型的潜力正大幅提升。
2.2 聚焦先行者——早期采用者的转型之路
随着机器人技术重塑工业运营格局,一批先锋企业正开拓全新领域,重新定义自动化所能达到的边界。通过在以往相互割裂的职能之间整合智能机器人技术,它们正借助physical AI弥合自动化进程中最后的缺口。这些领军者并非仅仅采用新工具,而是彻底重构工作流程,释放前所未有的灵活性与精度,并变革工厂车间与大型仓库中的作业方式。他们的转型历程为如何有效规模化物理AI的前沿能力提供了关键洞见,清晰展示了实现大规模持续创新所需的组织基础与技术支撑。
以下案例研究聚焦于早期采用者如何驾驭这一转型,为工业运营的未来图景提供了切实可行的实证范例。
【 案例研究 1 】
电商履约
通过全球规模最大的机器人运营重塑履约模式
亚马逊在其运营网络中部署了超过100万台机器人,是全球最大的机器人用户。这些机器人分布于300多个履约中心,与员工协同工作,执行分拣、搬运和运输包裹等重复性任务。公司在机器人领域的进展体现了其持续不断的试验与创新历程,始终聚焦于不断提升员工的工作条件和客户体验。
使命
在过去十年中,亚马逊推出了一系列持续迭代的“能力解锁”,将physical AI逐步应用于其履约中心:
🔺 Mobile goods-to-person robots:直接将库存运送至员工面前;
🔺 Computer vision-based sortation systems:优化库存流转;
🔺 Mechatronic packing lines:通过工程设计最大限度减少包装材料使用,支持其可持续发展目标;
🔺 Robotic manipulators:能够抓取目录中绝大多数商品。
尽管这些解决方案提升了安全性和生产效率,但最初各自独立运行。主要挑战在于如何将它们整合,以实现真正的end-to-end转型。
创新实践
为此,亚马逊围绕预测性AI规划与system interoperability,对其履约中心操作系统进行了重新设计。这一重构以三大核心技术为支柱,将从入库接收到出库装货的整个履约流程整合为统一、连贯的端到端作业流:
🔺Sequoia:一套automated storage-and-retrieval system;
🔺Sparrow:一款多关节操作臂,结合先进视觉与生成式AI引导的运动规划,可识别、抓取并放置公司库存中约60%的商品,并持续从每日产生的行业级规模数据中学习;
🔺Proteus:一款collaborative autonomous mobile robot,可实时绘制开放空间地图、识别人类社交信号,并与员工并行规划高效路径,搬运以往需设置围栏隔离区域才能处理的托盘。

Sequoia、Sparrow 和 Proteus(从左至右)
与亚马逊员工协同作业
亚马逊对physical AI的应用,使机器人能够在履约中心的真实环境中实现感知、推理与行动,同时仍依托于保障大规模安全运营所必需的确定性控制机制。
这些系统协同工作,解锁了仅靠rule-based robots无法完成的任务,在减轻员工重复性劳动的同时,将自动化扩展至运营中此前非结构化的环节。
成效
早期部署(包括位于路易斯安那州什里夫波特的下一代履约中心)已取得显著成果:工作场所安全性提升、现场高技能岗位增加30%、客户收货速度加快25%,以及整体效率提升25%——这些改进将进一步为客户带来更低的成本。此外,一项全新的生成式AI foundation model用于协调整个履约网络中移动机器人集群的运行,使车队行驶效率再提升10%。
基础与经验
亚马逊得以在其全球履约网络中规模化部署智能机器人,得益于三大基础要素:
🔺海量数据积累:数十年的计算机视觉监控数据,构建了一个互联网规模的现实世界图像与运动轨迹目录,为可靠物理AI模型的训练提供了关键“燃料”;
🔺以人为本的反馈机制:以一线员工(与机器人协同工作的人员)为核心,工程团队可直接与用户迭代优化,确保自动化方案减少操作摩擦,而非制造彼此割裂、无法融入整体工作流的“自动化孤岛”;
🔺端到端自主研发与部署:亚马逊自主设计、制造并部署其机器人解决方案。硬件、AI与运营团队的紧密协同,实现了快速的build–measure–learn循环,加速了技术落地。
这三大支撑要素——大规模数据、员工co-design以及一体化的开发部署流程——共同助力亚马逊在全球最大的履约网络中安全、一致地规模化应用物理AI。伴随这一转型,对高技能人才(如可靠性维护工程师等岗位)的需求增加了30%。为此,亚马逊推出了Career Choice计划,为员工提供学费支持,并报销书籍与认证考试费用,帮助其获得市场紧缺、高薪职业所需的学位与认证。此外,通过机电一体化与机器人学徒计划,员工可进一步拓展职业发展路径,时薪最高可提升40%。
【 案例研究 2 】
电子制造
自适应机器人实现高度柔性装配作业的自动化
为应对不断上升的劳动力成本以及全球范围内本地化生产的趋势,Foxconn提出了“可扩展的AI驱动机器人劳动力”愿景。公司规划了AI赋能工厂发展的三阶段路径:digital twin仿真设计、human-robot collaboration,最终迈向具备embodied intelligence的机器人化工厂。这一分阶段的转型体现了富士康更宏大的目标:不仅实现任务自动化,更要构建一个智能生产生态系统,以在其全球制造网络中释放更高的产业价值并提升运营可扩展性。
使命
作为富士康持续追求运营卓越与可持续创新的一部分,公司发现传统的rule-based robotics在自动化螺丝锁付和线缆插接等高精度任务时存在明显不足——这些任务对高精度、适应性以及精确的力控提出了严苛要求。为此,富士康正通过融合AI与digital twin技术的机器人系统,对这些精密作业进行创新。通过集成智能自动化、实时仿真与精密控制,富士康实现了更快的部署速度、更高的可靠性,并在全球制造业务中实现了可扩展的落地应用,为下一代智能、AI融合型工厂奠定了基础。
创新实践
富士康采用Nvidia平台,结合搭载AI的机器人机械臂,集成了高精度的socket pose estimation与real-time motion planning能力。这使得机器人能够执行高精度且无碰撞的操作,从而解锁了两项全新应用:
🔺螺丝锁付:AI赋能的机器人通过reinforcement learning习得最优运动轨迹与扭矩施加策略,显著提升了作业一致性与cycle time,并降低了缺陷率;
🔺线缆插接:此前因复杂度过高而无法实现自动化,如今通过实时力控与轨迹调整得以实现——机器人可动态调节抓取力度与运动方式,以适应零部件的差异性。
训练过程的虚拟化与physical AI的集成,使该解决方案能够快速部署至多个工厂,为富士康未来智能工厂构建了一个可扩展的实施蓝图。
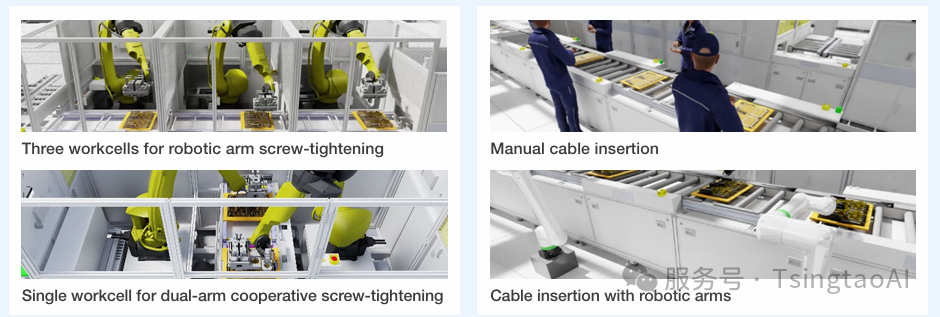
由AI与仿真驱动的高精度任务
1)螺丝锁付工作站仿真
采用不同类型机械臂的柔性工作站方案仿真。
2)线缆插接
对比两种方式:人工操作与机械臂操作。
成效
通过为生产线构建digital twins,实现快速的虚拟仿真、测试与验证,富士康将部署时间缩短了40%。AI驱动的机器人使cycle times提升20–30%,并增强了力反馈与运动控制能力,将错误率降低25%。虚拟验证消除了在物理环境中 costly 的试错过程,使运营成本降低15%。此外,AI驱动机械臂具备自适应调节的力控与轨迹规划能力,显著提升了精度与可靠性,在复杂装配任务中的成功率甚至超过人工操作。
基础与经验
1)技术:simulation-to-reality的迁移能力,通过加速AI模型适配并减少物理试错,支撑了大规模部署。
2)人才:工程师通过Nvidia图形协作平台Omniverse提供的数字孪生仿真、基于AI的机器人编程及工具链,接受了实操培训,掌握了virtual commissioning、自适应控制和数据驱动优化等技能,成功从传统工程师转型为AI融合型自动化架构师。
3)合作伙伴关系:富士康与Nvidia等服务提供商合作,构建了仿真与AI驱动的机器人基础设施;同时与制造生态系统伙伴(如Fanuc和Techman)携手,共同开发可扩展的自动化战略,这些合作在转型过程中发挥了关键作用。
如何实现规模化:
技术平台与合作伙伴关系
一个面向机器人的全新physical AI技术栈正在形成,而战略性合作伙伴关系对于实现系统集成、规模化部署以及整个生态系统的成功至关重要。
在智能机器人实现规模化之前,必须先打好基础。仅有技术是不够的——关键在于系统如何通过协作来构建、集成和持续演进。
3.1 新兴的物理AI技术栈
随着机器人技术日益成熟,一种全新的physical AI技术栈正在形成,其架构与传统机器人平台存在根本性差异。如图4所示,这一新兴技术栈围绕五个层级构建。
图4 新兴的物理AI技术栈
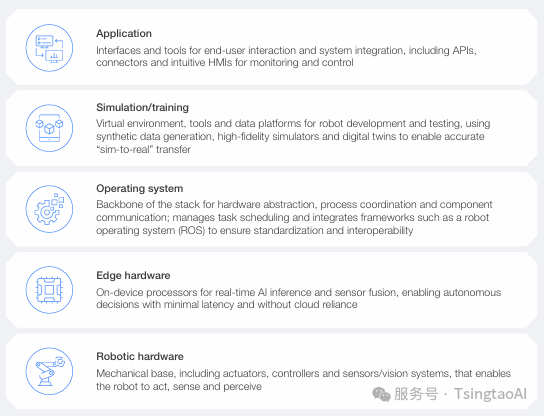
要实现可扩展的影响,必须将AI技术栈无缝集成到现有的制造环境中。
新进入者——从AI优先的初创企业(如Sereact、Covariant)到科技巨头(如Nvidia、Tesla、Apple、Google)——正与传统厂商共同重塑这一生态系统。其中一项关键创新体现在simulation/training layer。高保真世界模型、运动学仿真、基于物理的photorealistic simulations以及synthetic data generation,共同支撑了鲁棒AI技能的开发与部署。
一些纯软件初创公司基于现有硬件平台进行能力升级(例如Covariant、Intrinsic)。与此同时,一批垂直整合型企业也应运而生,提供覆盖整个技术栈的端到端解决方案(例如Neura、Figure、Tesla、Boston Dynamics)。在大多数情况下,它们的创新聚焦于采用humanoid形态的context-aware robotics。
无论采用模块化方案还是垂直整合方案,要实现可扩展的影响,都必须将AI技术栈无缝集成到现有的制造环境中。当前,制造商依赖一套复杂的工业软件工具链,需从多样化的来源摄取产品与工艺数据,并与邻近的自动化设备集成,以实现system-level intelligence。
除了传统系统集成商,一批新型服务商也已进入市场,包括提供RaaS模式的企业,涵盖机器人的部署、运营与维护。这一模式显著提升了技术可及性,降低了缺乏内部能力企业的应用门槛。
3.2 战略合作伙伴关系至关重要
在这一快速演进的格局中,对于希望把握最新机器人技术的制造商而言,建立战略合作伙伴关系是一条高效路径。在技术飞速发展的节奏下,没有任何一家企业能够独自现实地开发出所有先进能力。对于资源有限、难以独立构建所需能力的中小企业而言,这一障碍尤为突出。最成功的制造商善于识别并选择合适的合作伙伴开展协作。
通过与技术提供商、研究机构以及行业内外的同行建立紧密合作关系,制造商能够始终站在变革前沿,汇聚集体智慧。例如,一家汽车制造商可能与一家AI初创公司合作,共同开发配备机器人的装配线,同时与高校机器人实验室合作研发新型操作技术。
此类协作帮助企业紧跟技术快速进步的步伐——借助合作伙伴在AI、传感器或软件更新等领域的专业知识,避免落后于技术前沿。同时,它也有助于降低集成障碍:当机器人制造商、AI开发者与工厂工程师共同规划解决方案时,可提前预见并解决兼容性问题,确保更顺畅的部署。同样,合作伙伴关系促进了针对真实运营需求量身定制的解决方案的共同创造。制造商可向系统集成商和设备供应商明确工厂现场的实际需求,从而获得高度定制化的机器人系统——这是任何一方单独都无法实现的成果。
除技术革新外,协作还能开拓新市场与新能力,实现风险与投资共担,并推动与监管机构及标准组织的早期协同。
总而言之,physical AI技术栈的兴起不仅关乎新技术架构,更关乎构建新型合作关系与生态系统。这是一个垂直整合的机器人公司与组件专业厂商并肩协作、终端用户与创新者紧密互动的世界。拥抱这种共建伙伴关系与生态系统的理念,将是制造商驾驭智能机器人新时代的关键——保持敏捷性,共担投资、收益与风险,共同打造下一代工业自动化。
谁来引领:
赋能新一代工业 workforce
机器人技术不仅应被视为短期的成本杠杆,更应作为长期卓越运营的战略赋能者——而这一转型必须由具备所需技能、获得充分赋能的人员来引领。
physical AI的兴起不仅是一项技术进步,更是对工业工作如何被设计、执行和体验的结构性变革。
领导者应超越将单一机器人应用场景仅视为短期降本工具的视角,转而将这些新兴自动化机遇视为实现长期运营成功与韧性的战略赋能手段。
4.1 机器人与 workforce 发展的目标图景
这一转型需要一个清晰的自动化目标图景,全面考量所有机器人应用场景,并制定相应的实施计划——该计划还必须着眼于长期的 workforce 发展。当智能机器人被战略性部署时,能够适应作业变异性、减少操作失误,并在劳动力短缺或供应链中断的情况下维持稳定绩效。
其中最直接且切实的影响之一体现在 workplace safety:机器人可承接涉及搬运重物、重复性动作或暴露于危险环境中的任务——这些正是工伤的常见诱因。在亚马逊,部署机器人的站点事故率下降了15%,员工逐步转向以监督、诊断和持续改进为核心的岗位¹³。此外,human-centric system designs使工人能够转型至更安全、更具成就感的角色,充分发挥其认知优势。例如,robust.AI 开发的机器人作为直观、支持性的团队成员,有效降低了车间操作的复杂性,提升了人机协作水平。
4.2 技能与角色的转变
这一技术飞跃也重新定义了人类在工业环境中的角色。随着physical AI自动化执行人工任务,某些传统岗位类别可能被替代。根据世界经济论坛Future of Jobs Report 2025,“机器人与自主系统”预计将成为2030年前导致净岗位流失的首要驱动因素¹⁵。然而,这种替代并非简单消失,而是一种转型。新兴的高技能岗位正在涌现,其核心职责包括监督智能系统、处理edge cases以及优化系统性能。
物理AI自动化将人类解放出来,专注于更高层次的任务。
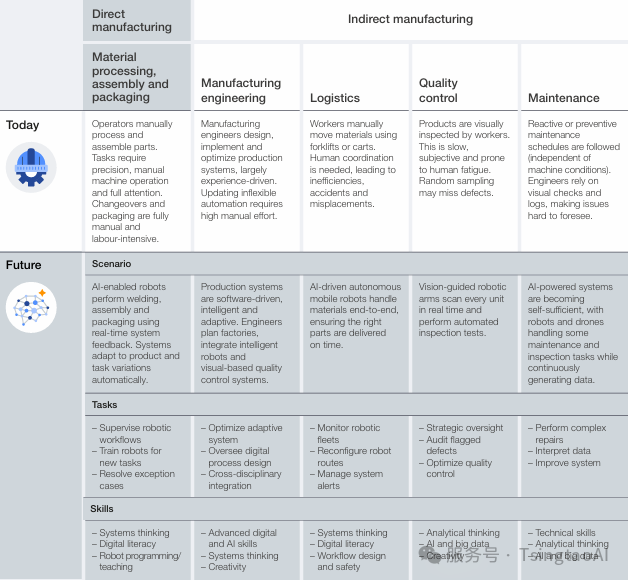
这一转变在图5所示的任务与技能演变格局中得到了清晰体现。例如:
设备操作员 正转型为机器人技师、自动化主管和AI系统训练师;
物流人员 正成为mobile robots车队的协调员;
质量控制专员 正转向AI辅助质检员角色,通过解读算法输出结果来判断质量,而非手动检查每个产品;
维护团队 正从被动维修转向基于传感器数据与AI预测的主动式预测性诊断;
制造工程师 的工作重心正从设计和维护系统,转向优化自适应的AI驱动型机器人解决方案。
随着围绕机器人展开的岗位日益重要,设立专职机器人团队的企业将在这一变革中走在前列。领导者也将从通过劳动力与流程改进来管理产出,转向将AI机器人深度融入商业模式,并聚焦于伦理、网络安全和持续创新。
这些变化标志着 workforce 角色更广泛的转型。未来的 workforce 将更加注重以下能力:
例外管理与判断力:在机器人失效时做出细致入微的决策;
数据解读与决策能力:通过分析系统数据指导运营与改进;
持续改进与系统优化:识别提升AI赋能工作流性能的机会。
这些实例清晰展示了岗位与任务的演进方向。随着智能机器人——以及其他前沿技术——持续重塑工业工作,这一议题将变得愈发重要。
4.3 新一代 workforce 的关键要务
在机器人时代取得成功,取决于工程、IT、运营及其他职能之间无缝的跨学科协作,并辅以lifelong learning的文化,确保每个岗位的技能持续更新。为释放这一潜力,领导者必须强化change-management能力,有效引导转型进程,并将持续创新、学习与适应性深植于组织之中。
在智能机器人时代,任何转型若缺乏人员层面的转变都是不完整的。战略性 workforce 规划至关重要,以确保智能机器人不仅带来运营价值,更能构建长期的经济与社会韧性。必须以清晰的自动化目标图景,以及对未来角色、任务和所需技能的明确构想,来指导系统化且持续的reskilling与upskilling举措,从而赋能未来的工业 workforce。
为应对当前正在进行的人员转型与技能演进,World Economic Forum已启动Human–Machine Collaboration倡议。该倡议聚焦于重新定义human–machine synergy,并提供一套模型框架,通过skill mapping与人才战略,推动 workforce 顺利转型。其根本目标在于确保在前沿技术驱动的变革中,人始终处于核心地位。
结论:行动刻不容缓
机器人革命已不再遥不可及——它已然展开,正在重塑工业运营。
对领先制造商而言,智能机器人已超越试验阶段,成为运营卓越、适应能力与长期韧性的基石。
曾经看似不可能的任务,如今已切实可行。过去因技术复杂性或经济限制而遥不可及的自动化场景,如今在physical AI、仿真环境和机器人系统设计的快速进步推动下,正变得经济可行且技术成熟。未来的目标状态将是一种分层的自动化战略——rule-based、raining-based与context-based的机器人系统共存协作,实现system-level intelligence,为未来增长奠定基础。随着集成速度加快、可扩展性提升,机器人技术正从一项小众能力转变为竞争必需。
技术必须融合,而非孤立。要充分释放智能机器人的潜力,需要构建强大的技术基础设施,将各类机器人解决方案统一整合、协同支撑。一个全新的AI技术栈正在形成,必须将其无缝嵌入现有工业软件工具链,以实现端到端的系统级智能。而实现这一深度集成绝非单打独斗所能完成——成功将取决于能否构建强有力的协作生态系统,这正是区分那些能规模化部署智能机器人与那些困于孤立应用的企业之关键。
人必须引领这场转型。战略前瞻至关重要,需将机器人应用与运营变异性、生产模式及长期 workforce 发展相协调。制造商必须超越将单一自动化用例仅视为短期降本工具的思维,转而将其视为驱动长期、可持续价值创造的催化剂。随着岗位角色不断演变,upskilling与reskilling将成为关键,以确保员工具备监督、优化并拓展智能系统的能力。唯有秉持“以人为本”的理念,企业才能将机器人技术真正融入自身DNA,实现可持续且包容的发展。
制造商必须引领,而非跟随。领导力的窗口期就在当下。犹豫不决者将错失技术与经济临界点快速汇聚所形成的势能;而果断行动者不仅将释放生产力与韧性,更将塑造工业运营的未来——一个智能、自适应且深度协作的未来。构建这一未来的时机,就是今天。
论坛致力于推动协作。展望未来,World Economic Forum将继续作为塑造智能机器人未来的关键平台。通过汇聚顶尖创新者、政策制定者与行业先锋,论坛将促进跨行业协作,分享前沿洞见,并推动负责任的规模化应用。其目标是照亮前行之路,赋能各方 stakeholders 以信心、敏捷性与使命感,共同驾驭这一新时代。