[无人机sdk] MissionManager | WaypointMission | HotpointMission
第三章:任务管理器与航点任务/热点任务
在第二章:飞行控制器中,我们学会了如何给无人机下达"起飞"、"降落"或"飞到特定点"等直接指令
这对于即时控制非常有用,但如果需要无人机自主执行更复杂的动作序列呢?
比如需要让无人机以网格模式巡查一片区域,或者反复环绕某个地标飞行。
如果使用单独的FlightController指令来完成这些任务,工作量将非常庞大
这时就需要**任务管理器(MissionManager)**登场了。
它是无人机的专属任务控制中心,专门用于编排高级自动化飞行任务。它简化了复杂航线与行为的编程,让无人机能够自主执行完整的动作序列
什么是"任务管理器"?(无人机的任务控制中心)
可以把MissionManager视为无人机长期任务的专家规划师与协调员
不同于通过FlightController向无人机交代飞行的每个微小细节,只需给MissionManager一个高级计划,它就会自行解决执行细节。
它的主要职责是:
- 初始化:为任务设置总体参数
- 管理:跟踪不同类型的任务
- 控制:启动、暂停、恢复或停止正在执行的任务
MissionManager本身并不直接操控无人机飞行,而是依赖专门的"任务模块"来处理每种任务类型的细节。
它管理的最常见且强大的两种任务类型是航点任务(Waypoint Missions)和热点任务(Hotpoint Missions)
(拆解架构)
自动化任务类型
MissionManager可以处理多种自动化飞行任务
目前我们重点介绍两种基础类型:
| 任务类型 | 描述 | 典型应用场景 |
|---|---|---|
| 航点任务 | 无人机按预定顺序飞越一系列导航点(航点) | 区域测绘、配送路线、结构化巡检 |
| 热点任务 | 无人机以固定半径和高度围绕特定兴趣点(热点)盘旋 | 监控、拍摄电影级环绕镜头、持续观察 |
这些任务让无人机能够执行高级自动化操作,简化了原本需要持续人工干预或复杂实时计算的工作。
第一个自动化任务:执行航点航线
让我们一步步创建一个简单的航点任务。无人机将起飞,飞往几个预定义的点,然后返回。
开始之前,请记得按照第一章:飞行器准备好Vehicle对象,并按照第二章:飞行控制器获取控制权限
#include <dji_vehicle.hpp>
#include <dji_linux_helpers.hpp>
#include <dji_mission_manager.hpp> // 任务管理器
#include <dji_waypoint.hpp> // 航点任务详情
#include <iostream>
#include <vector> // 存储航点
#include <cmath> // 数学运算如M_PI, cos, sin// 定义多边形的小半径
#define POLYGON_RADIUS 6.0 // 米
#define NUM_WAYPOINTS 4 // 多边形顶点数// ... 在主函数中 ...LinuxSetup linuxEnvironment(argc, argv);
DJI::OSDK::Vehicle* vehicle = linuxEnvironment.getVehicle();if (vehicle == NULL) {std::cout << "飞行器未初始化,退出。\n";return -1;
}// 假设已完成激活(如第一章所示)
// DJI::OSDK::ACK::ErrorCode activateAck = vehicle->activate(...);
// ... 错误检查 ...int functionTimeout = 1; // SDK函数通用超时时间// 获取摇杆控制权限
std::cout << "尝试获取摇杆控制权限...\n";
DJI::OSDK::ErrorCode::ErrorCodeType ret =vehicle->flightController->obtainJoystickCtrlAuthoritySync(functionTimeout);if (ret != DJI::OSDK::ErrorCode::SysCommonErr::Success) {std::cout << "获取摇杆控制权限失败!错误: " << std::hex << ret << std::endl;return -1;
}
std::cout << "成功获取摇杆控制权限!\n";// 航点任务需要GPS数据
// 为简化示例,假设已设置订阅获取当前GPS数据
// 数据订阅将在第六章详细介绍
// 这里我们假装能立即获取GPS读数
// 实际场景中,你需要订阅TOPIC_GPS_FUSED并等待数据
// 当前GPS数据的占位符
DJI::OSDK::Telemetry::GPSFused currentGPS = {34.000000, // 示例纬度-118.000000, // 示例经度10.0, // 示例高度0, 0, 0, 0, 0
};
// 实际程序中,你应该通过vehicle->subscribe->getValue<TOPIC_GPS_FUSED>()获取
// 并设置数据订阅(见第六章)
第一步:初始化航点任务
首先,我们需要告诉MissionManager要执行航点任务,并定义一些基本设置。
// ... 获取控制权限和当前GPS数据后 ...DJI::OSDK::MissionManager* missionManager = vehicle->missionManager;// 定义航点任务的初始设置
DJI::OSDK::WayPointInitSettings missionInitSettings;
missionInitSettings.maxVelocity = 10; // 最大飞行速度(米/秒)
missionInitSettings.idleVelocity = 2; // 巡航速度(米/秒)
missionInitSettings.finishAction = 0; // 0: 无动作, 1: 返航
missionInitSettings.executiveTimes = 1; // 执行任务一次
missionInitSettings.yawMode = 0; // 0: 自动(偏航指向下一航点)
missionInitSettings.traceMode = 0; // 0: 点对点, 1: 曲线
missionInitSettings.RCLostAction = 1; // 1: RC信号丢失时返航
missionInitSettings.gimbalPitch = 0; // 默认云台俯仰角
missionInitSettings.indexNumber = NUM_WAYPOINTS + 1; // 总航点数std::cout << "初始化航点任务设置...\n";
DJI::OSDK::ACK::ErrorCode initAck =missionManager->init(DJI::OSDK::DJI_MISSION_TYPE::WAYPOINT, functionTimeout, &missionInitSettings);//将航点传给MissionManager initif (DJI::OSDK::ACK::getError(initAck))
{DJI::OSDK::ACK::getErrorCodeMessage(initAck, __func__);std::cout << "初始化航点任务失败!退出。\n";vehicle->flightController->releaseJoystickCtrlAuthoritySync(functionTimeout);return -1;
}std::cout << "航点任务设置初始化成功!\n";
第二步:创建并上传单个航点
现在任务框架已初始化,我们需要定义无人机将访问的具体点
我们将在无人机当前位置周围创建NUM_WAYPOINTS个点,然后再次添加起点以形成闭环,构成一个多边形。
// ... 任务初始化后 ...std::vector<DJI::OSDK::WayPointSettings> waypointList;// 创建起始航点
DJI::OSDK::WayPointSettings start_wp;
// 设置航点默认参数的辅助函数
auto setWaypointDefaults = [](DJI::OSDK::WayPointSettings* wp) {wp->damping = 0;wp->yaw = 0;wp->gimbalPitch = 0;wp->turnMode = 0;wp->hasAction = 0;wp->actionTimeLimit = 100;wp->actionNumber = 0;wp->actionRepeat = 0;// ... 其他默认设置 ...
};setWaypointDefaults(&start_wp);
start_wp.latitude = currentGPS.latitude;
start_wp.longitude = currentGPS.longitude;
start_wp.altitude = currentGPS.altitude + 5; // 在当前高度基础上飞行5米
start_wp.index = 0; // 第一个航点索引
waypointList.push_back(start_wp);// 生成多边形形状的其他航点
float64_t extAngle = 2 * M_PI / NUM_WAYPOINTS;
for (int i = 1; i <= NUM_WAYPOINTS; i++)
{DJI::OSDK::WayPointSettings wp;setWaypointDefaults(&wp);wp.index = i;// 计算相对于起点的经纬度变化,形成多边形float64_t deltaX = POLYGON_RADIUS * cos(i * extAngle);float64_t deltaY = POLYGON_RADIUS * sin(i * extAngle);wp.latitude = start_wp.latitude + (deltaX / 111111.0); // 约111111米/纬度wp.longitude = start_wp.longitude + (deltaY / (111111.0 * cos(start_wp.latitude * M_PI / 180.0)));wp.altitude = start_wp.altitude; // 保持初始高度waypointList.push_back(wp);
}// 将每个航点上传到无人机
std::cout << "上传" << waypointList.size() << "个航点...\n";
for (auto& wp : waypointList) {std::cout << "上传航点" << (int)wp.index<< " 位置(纬度,经度,高度): " << wp.latitude << ", "<< wp.longitude << ", " << wp.altitude << std::endl;DJI::OSDK::ACK::WayPointIndex uploadAck =missionManager->wpMission->uploadIndexData(&wp, functionTimeout);if (DJI::OSDK::ACK::getError(uploadAck.ack)) {DJI::OSDK::ACK::getErrorCodeMessage(uploadAck.ack, __func__);std::cout << "上传航点" << (int)wp.index << "失败!退出。\n";vehicle->flightController->releaseJoystickCtrlAuthoritySync(functionTimeout);return -1;}sleep(1); // 给无人机时间处理每个航点
}
std::cout << "所有航点上传成功!\n";
第三步:启动航点任务
所有航点上传后,我们就可以命令无人机开始执行任务了。
// ... 上传所有航点后 ...std::cout << "启动航点任务...\n";
DJI::OSDK::ACK::ErrorCode startMissionAck =missionManager->wpMission->start(functionTimeout);if (DJI::OSDK::ACK::getError(startMissionAck)) {DJI::OSDK::ACK::getErrorCodeMessage(startMissionAck, __func__);std::cout << "启动航点任务失败!退出。\n";vehicle->flightController->releaseJoystickCtrlAuthoritySync(functionTimeout);return -1;
}
std::cout << "航点任务已启动!无人机应开始沿路径飞行。\n";// 等待任务完成。时间取决于路径长度和速度。
sleep(60); // 等待60秒(根据任务需要调整)
第四步:停止任务并释放控制权限
任务完成后或需要干预时,可以停止任务并释放控制权限。
// ... 等待任务完成后 ...std::cout << "停止航点任务(如果仍在运行)...\n";
DJI::OSDK::ACK::ErrorCode stopMissionAck =missionManager->wpMission->stop(functionTimeout);
// 检查错误,但如果任务已完成则不必退出std::cout << "尝试释放摇杆控制权限...\n";
DJI::OSDK::ErrorCode::ErrorCodeType releaseRet =vehicle->flightController->releaseJoystickCtrlAuthoritySync(functionTimeout);if (releaseRet != DJI::OSDK::ErrorCode::SysCommonErr::Success) {std::cout << "释放摇杆控制权限失败!错误: " << std::hex << releaseRet << std::endl;return -1;
}
std::cout << "摇杆控制权限已成功释放!任务完成。\n";
基础热点任务概念
热点任务的设置略有不同:
-
为热点任务初始化MissionManager:
// DJI::OSDK::MissionManager* missionManager = vehicle->missionManager; // DJI::OSDK::ACK::ErrorCode initAck = // missionManager->init(DJI::OSDK::DJI_MISSION_TYPE::HOTPOINT, functionTimeout, NULL); // // ... 错误检查 ... -
定义热点参数:
// missionManager->hpMission->setHotPoint(currentGPS.longitude, currentGPS.latitude, 10); // 以当前GPS为中心,高度10米 // missionManager->hpMission->setRadius(5); // 5米半径的圆 // missionManager->hpMission->setYawRate(15); // 15度/秒旋转 // missionManager->hpMission->setClockwise(true); // 顺时针旋转 -
启动热点任务:
// missionManager->hpMission->start(functionTimeout);
内部机制:MissionManager如何协调
MissionManager是一个智能协调器。
当你告诉它init一个任务时,它并不直接与无人机讨论任务逻辑,而是创建或使用一个专门的对象(如WaypointMission或HotpointMission),并将任务委托给该对象。
这个专门的对象随后处理与无人机飞行控制器的底层通信。(相当于是有包了一层,分为了way和hot两种情况)
MissionManager初始化流程
让我们看看初始化航点任务时的简化事件序列:
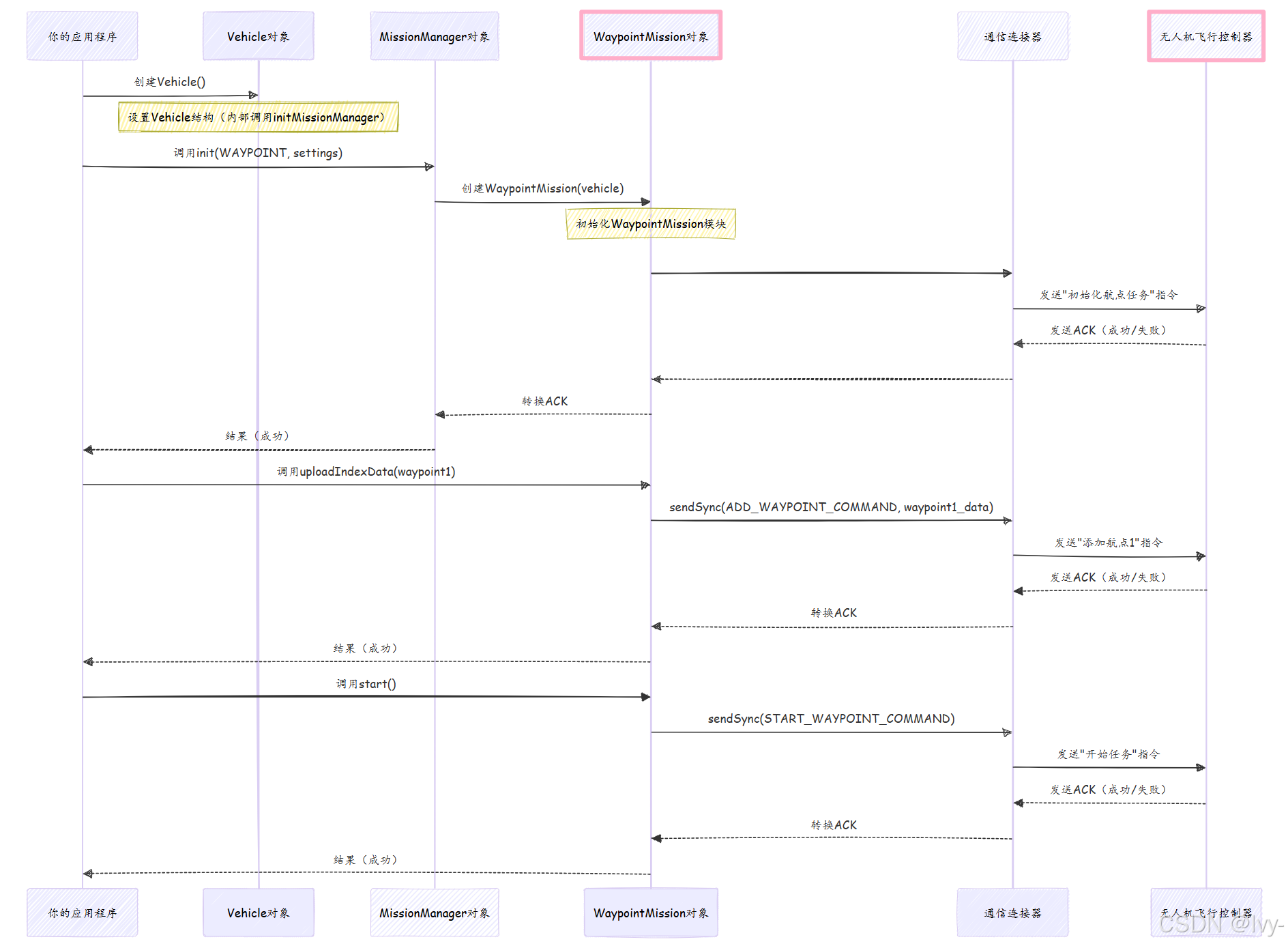
结论
MissionManager对象是你实现复杂飞行路径和任务自动化的强大工具。
-
通过理解它作为任务控制中心的角色,以及它如何协调专门的
WaypointMission和HotpointMission对象,可以编程让无人机执行高级自主操作。 -
这种抽象让你无需关注飞行控制的细枝末节,能够专注于无人机应用的更高层次目标。
现在我们的无人机能够按照预定路径飞行了,让我们探索如何控制它的感知系统——它的"眼睛"和"头部"
下一章:相机模块/云台模块