【图像算法 - 32】基于深度学习的风力发电设备缺陷检测系统:YOLOv12 + UI界面 + 数据集实现
摘要:
风力发电作为可再生能源的重要支柱,其核心设备——风力发电机(风机)长期暴露于高风、高湿、高盐雾等严苛环境中,易出现叶片裂纹、雷击损伤、螺栓松动、塔筒腐蚀等结构性缺陷。传统依赖人工登高巡检的方式,存在高风险、高成本、低效率、漏检率高等问题。本文介绍如何基于 YOLOv12 与 OpenCV 构建一套面向风机的智能缺陷检测系统,结合无人机航拍图像,实现对关键部件缺陷的自动识别与定位,为风电场智能运维提供可靠技术支撑。关键词:YOLOv12, OpenCV, 风力发电, 风机缺陷检测, 深度学习, 目标检测, 无人机巡检, 叶片裂纹, 工业AI, Python
【图像算法 - 32】基于深度学习的风力发电设备缺陷检测系统:YOLOv12 + UI界面 + 数据集实现
1. 引言:从“人巡”到“智检”,守护风电安全
全球风电装机容量持续增长,单机容量已突破 15MW,叶片长度超 120 米。如此庞大的高空结构,一旦出现缺陷未被及时发现,轻则降低发电效率,重则引发叶片断裂、倒塌事故,造成重大经济损失与安全风险。
常见风机缺陷包括:
- 叶片类:裂纹、前缘腐蚀、后缘开裂、雷击孔、胶衣脱落
- 螺栓类:塔筒/法兰连接螺栓缺失、松动、锈蚀
- 塔筒类:油漆剥落、锈蚀、焊缝开裂
- 机舱类:油污泄漏、散热片破损、传感器脱落
传统人工巡检需停机、登高、望远镜观察,效率低且危险。
而无人机 + AI视觉检测方案,可在不停机状态下完成全塔扫描,结合深度学习模型自动识别缺陷,实现安全、高效、低成本的智能运维。

2. 技术选型:YOLOv12 + OpenCV 的工业级组合
| 技术 | 作用 |
|---|---|
| YOLOv12 | 作为核心检测模型,负责从无人机航拍图像中精准定位风机各部件及缺陷区域。YOLOv12 在远距离小目标(如螺栓、微裂纹)检测上表现优异,适合高空巡检场景。 |
| OpenCV | 负责图像预处理(去雾、增强)、多视角图像拼接、检测结果可视化,并作为连接无人机 SDK 与 AI 模型的桥梁。 |
💡 为何适合风机场景?
- YOLOv12 支持高分辨率输入(如 1024×1024),保留远距离细节
- 推理速度快,满足无人机边飞边检或快速回传分析需求
- 端到端训练,易于集成至边缘计算设备(如 Jetson)
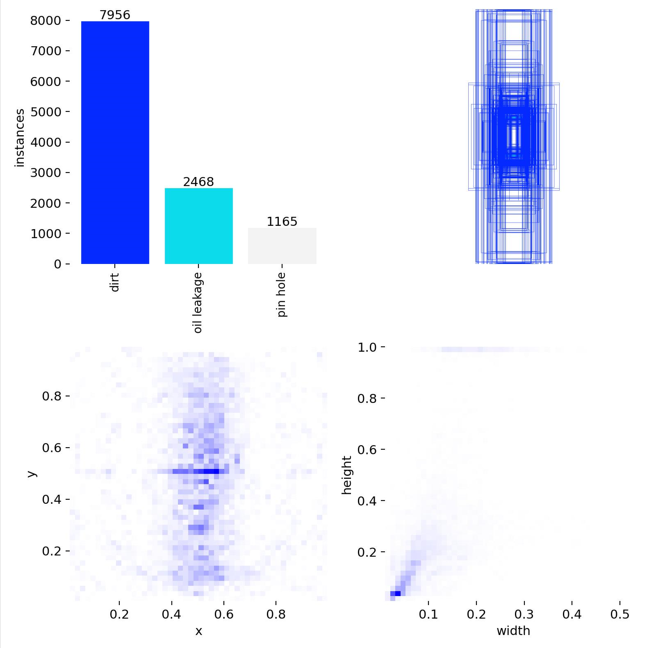
3. 数据准备:构建风机缺陷数据集
3.1 数据采集
- 使用高分辨率无人机(如 DJI M300 + Zenmuse H20T)对风机进行环绕拍摄
- 拍摄高度:10~50 米(根据叶片长度调整)
- 覆盖时段:晴天、多云、清晨/傍晚(模拟不同光照)
- 重点区域:叶片前缘/后缘、叶根、叶尖、塔筒焊缝、法兰螺栓、机舱外壳
3.2 缺陷类别定义
| 英文类别 | 中文名称 | 说明 |
|---|---|---|
| blade_crack | 叶片裂纹 | 表面或内部裂纹,可能由疲劳或制造缺陷引起 |
| lightning_damage | 雷击损伤 | 叶片表面烧蚀孔洞或碳化痕迹 |
| leading_edge_erosion | 前缘腐蚀 | 叶片迎风面前缘胶衣剥落、纤维裸露 |
| trailing_edge_crack | 后缘开裂 | 叶片尾缘分层或断裂 |
| bolt_missing | 螺栓缺失 | 法兰或塔筒连接处螺栓丢失 |
| bolt_loose | 螺栓松动 | 螺栓位置偏移或垫片异常 |
| tower_corrosion | 塔筒腐蚀 | 钢结构表面锈蚀、油漆剥落 |
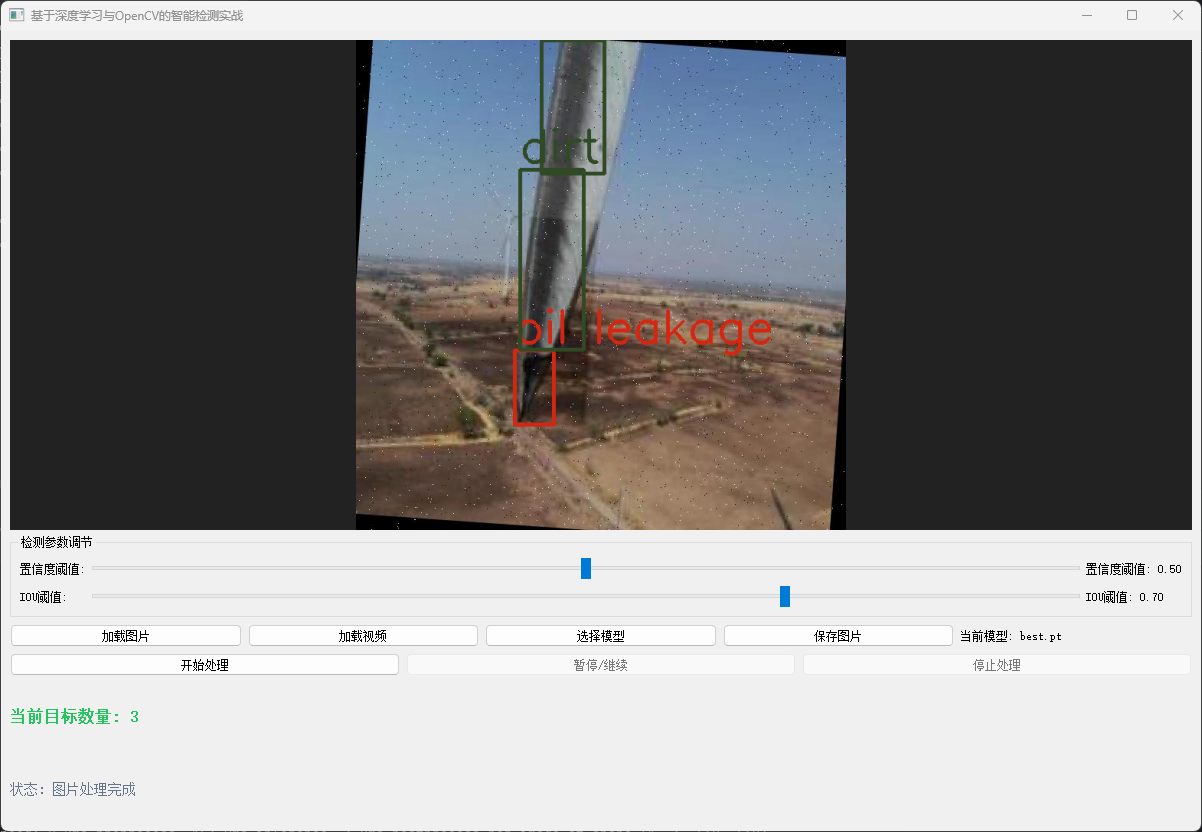
| oil_leak | 油污泄漏 | 机舱或齿轮箱区域油渍 |
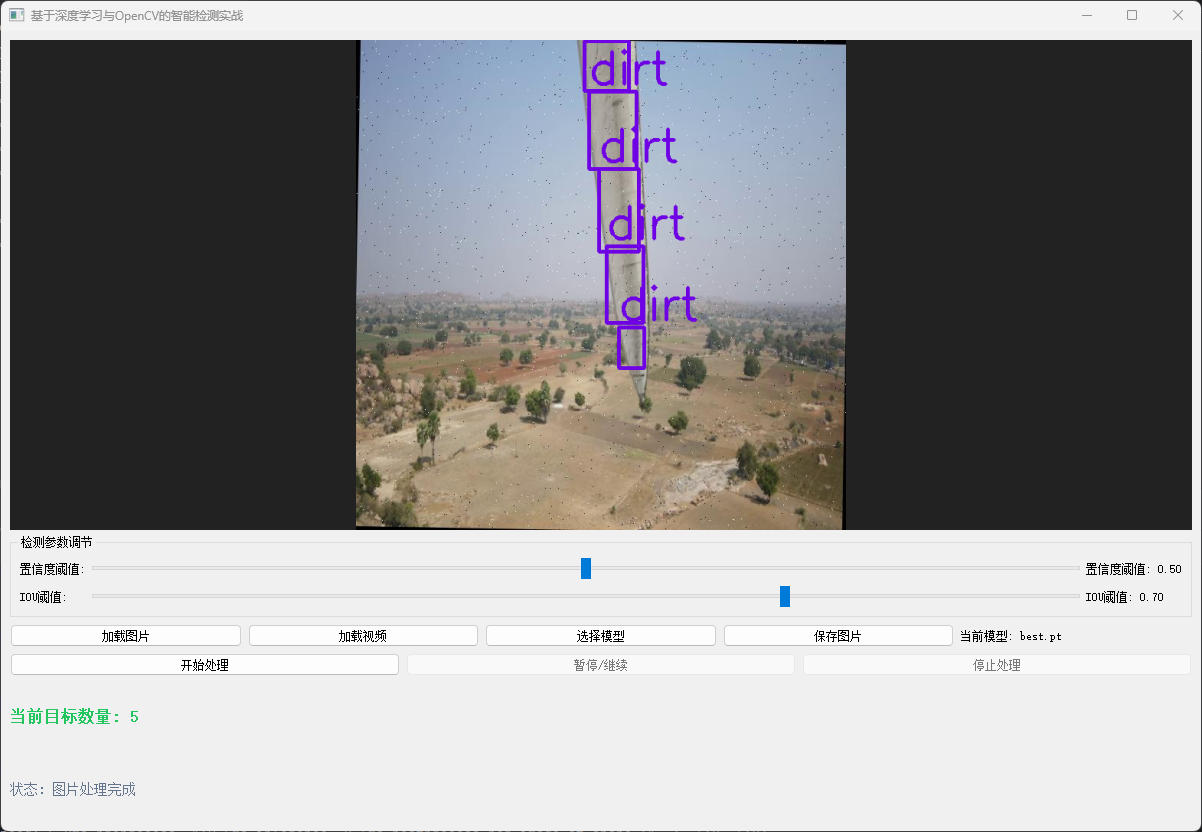
| dirt | 积尘 / 污垢 | 指风机叶片、机舱外壳、散热片等表面因长期暴露在空气中积累的灰尘、沙土、盐粒、昆虫残骸等污染物。会影响气动效率或散热性能。 |
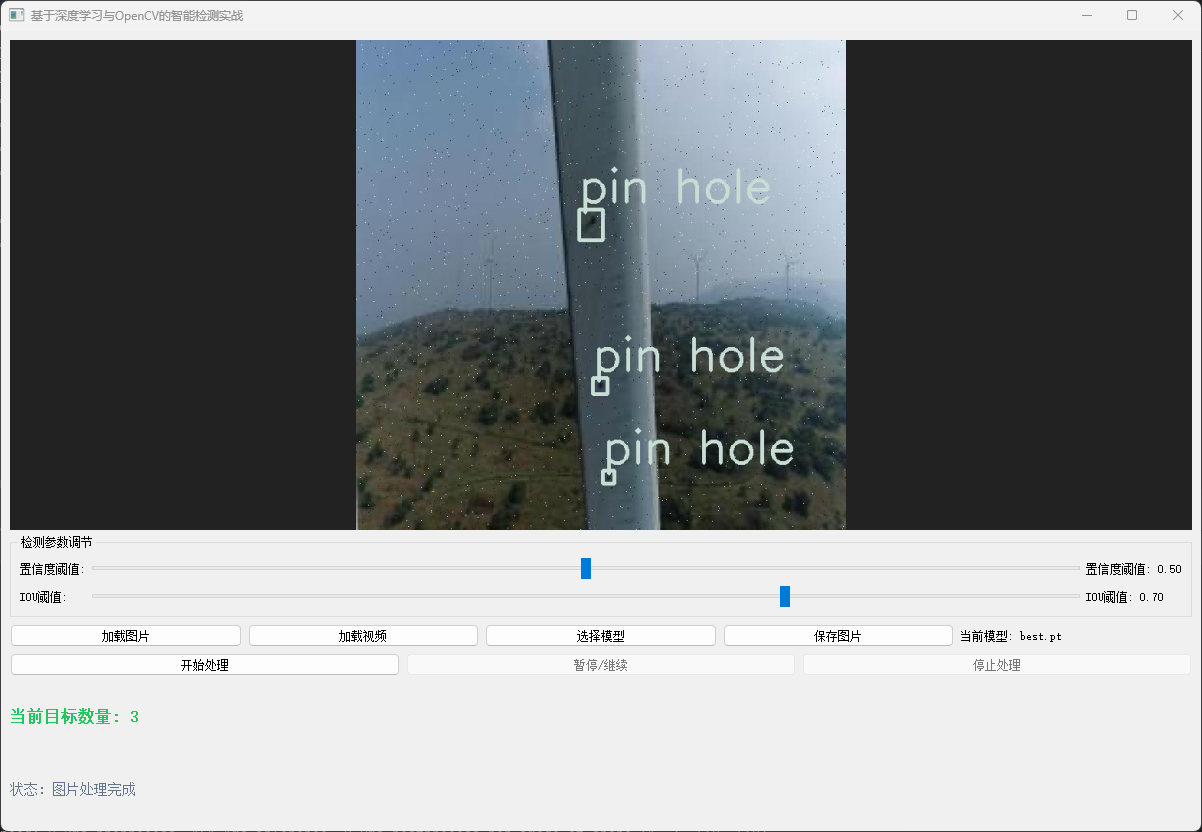
| pin hole | 针孔 | 在风电场景中,通常指叶片表面涂层(胶衣)或复合材料层上出现的微小孔洞(直径约0.1–1mm),可能由制造缺陷、紫外线老化或微小异物冲击引起。若未及时处理,水分侵入会导致内部纤维腐蚀或分层(delamination)。 |
3.3 数据标注与配置
- 标注工具:CVAT / LabelImg
- 标注方式:Bounding Box(部分细长裂纹可采用旋转框或实例分割,本文以目标检测为主)
- 数据划分:7:2:1(train:val:test)
- 配置文件
wind_turbine.yaml:
path: ./wind_turbine_dataset
train: images/train
val: images/valnc: 3
names: ["dirt","oil_leak","pin hole"
]
4. 模型训练:使用 YOLOv12 进行端到端学习
4.1 环境安装
pip install ultralytics opencv-python
4.2 训练命令
yolo train \model=yolo12n.pt \data=wind_turbine.yaml \epochs=150 \imgsz=1024 \batch=8 \name=wind_yolo12n_v1 \hsv_h=0.01 \hsv_s=0.5 \degrees=15.0 \translate=0.2 \scale=0.3 \mosaic=0.8
参数说明:
imgsz=1024:提升小缺陷(如螺栓、微裂纹)的识别能力batch=8:因高分辨率占用显存较大,适当降低 batch sizemosaic=0.8:增强模型对局部缺陷的鲁棒性
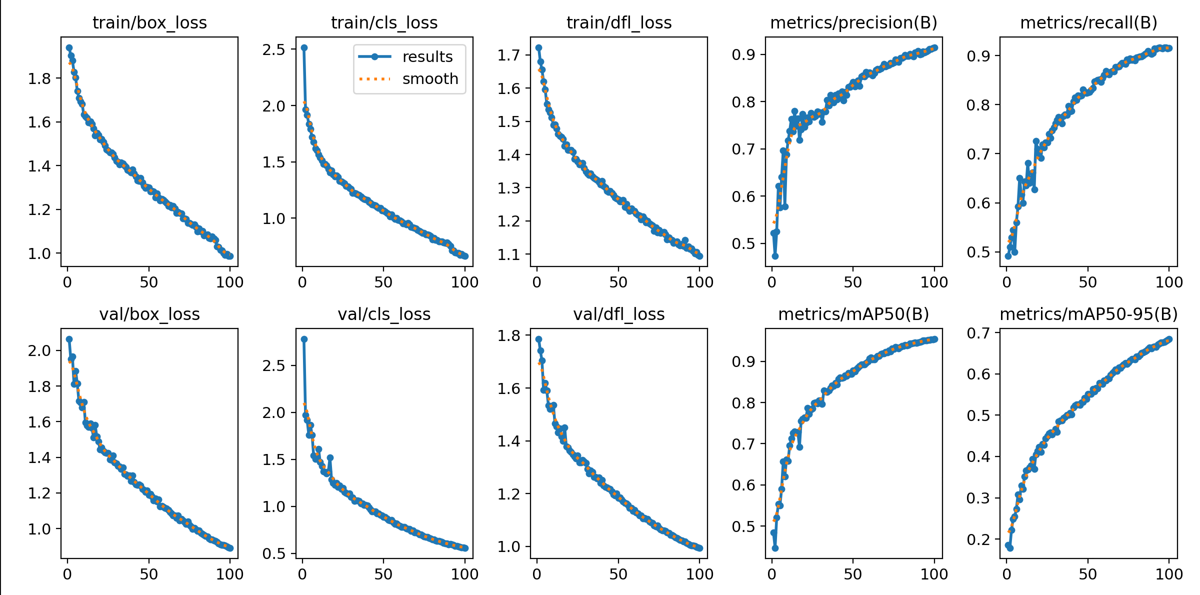
4.3 模型评估
训练完成后评估性能:
yolo val model=runs/detect/wind_yolo12m_v1/weights/best.pt data=wind_turbine.yaml
5. 推理与应用:OpenCV 实现风机缺陷检测
import cv2
from ultralytics import YOLOmodel = YOLO('runs/detect/wind_yolo12n_v1/weights/best.pt')# 类别颜色映射(BGR)
colors = {'dirt': (0, 0, 255), 'oil_leak': (255, 0, 255), 'pin hole': (255, 165, 0)
}# 加载无人机图像
img = cv2.imread('turbine_blade.jpg')
results = model(img, imgsz=1024, conf=0.4)# 绘制结果
for result in results:boxes = result.boxesfor box in boxes:x1, y1, x2, y2 = map(int, box.xyxy[0])cls_id = int(box.cls[0])conf = float(box.conf[0])cls_name = result.names[cls_id]color = colors.get(cls_name, (255, 255, 255))cv2.rectangle(img, (x1, y1), (x2, y2), color, 2)label = f"{cls_name}: {conf:.2f}"cv2.putText(img, label, (x1, y1 - 10),cv2.FONT_HERSHEY_SIMPLEX, 0.5, (255, 255, 255), 1)cv2.imshow('Wind Turbine Defect Detection', img)
cv2.waitKey(0)
cv2.destroyAllWindows()
6. 挑战与解决方案
| 挑战 | 解决方案 |
|---|---|
| 缺陷尺度极小(如螺栓) | 高分辨率输入(1024+)+ YOLOv12 小目标检测头优化 |
| 远距离图像模糊/抖动 | 无人机云台稳定 + 图像超分预处理(如 Real-ESRGAN) |
| 复杂背景干扰(天空、云、山) | 数据增强(CutOut、Mosaic)+ 背景抑制训练策略 |
| 光照反差大(逆光/强光) | 多时段数据采集 + HSV 数据增强 |
| 实时性要求(现场快速诊断) | 模型导出为 ONNX + TensorRT 加速,部署至边缘设备 |
7. 展望
- 多模态融合:可见光 + 红外(检测过热轴承)+ LiDAR(三维形变分析)
- 时序缺陷追踪:对比历史巡检图像,量化裂纹扩展速度
- 数字孪生集成:将缺陷位置映射至风机三维模型,生成维修工单
- 自主巡检闭环:无人机自动规划航线 → 拍摄 → AI分析 → 异常报警
- 大模型辅助:结合视觉大模型(如 SAM)实现零样本缺陷分割
8. 总结
本文系统介绍了基于 YOLOv12 与 OpenCV 的风力发电设备缺陷检测技术方案。该系统利用无人机航拍图像,可自动识别叶片裂纹、雷击损伤、螺栓缺失、塔筒腐蚀等关键缺陷,显著提升风电场运维效率与安全性。通过深度学习赋能传统能源基础设施,我们正迈向更智能、更可靠的绿色未来。