TensorFlow学习入门
TensorFlow的发展历程
Google 主导开发的开源机器学习框架,其发展历程围绕 “技术迭代、生态扩张、应对竞争” 三大核心主线,从内部工具逐步成长为支撑全球工业级 AI 应用与科研创新的综合性平台。
以下是其关键发展阶段与里程碑事件:
起源与雏形(2009-2015):从内部工具到开源发布
前身 DistBelief(2009-2011):
TensorFlow 的技术根源可追溯至 2009 年 Geoffery Hinton 带领团队开发的 DistBelief 项目,这是 Google Brain 内部用于深度神经网络训练的专有系统。该系统实现了广义反向传播算法,使 Google 内部语音识别错误率降低 25%,并广泛应用于搜索、广告等核心业务,但未对外开源。
重构与更名(2011-2015):
由于 DistBelief 扩展性不足,Google 调动 Jeff Dean 等顶尖工程师对其重构,目标是打造更稳健、通用、支持多平台的工业级框架。重构后的框架基于 “计算图 + 张量流动” 的核心设计,命名为 “TensorFlow”(意为 “张量在计算图中的流动”)。
开源发布(2015.11):
Google 正式发布 TensorFlow 0.1 版本及白皮书,以 Apache 2.0 许可证开源。初期版本支持 CPU/GPU 异构计算、分布式训练,且可部署于 iOS/Android 等移动设备,凭借 Google 的技术背书迅速引发行业关注。
静态图时代的崛起与垄断(2015-2019):1.x 系列奠定工业级地位
关键版本迭代:
2016.4:发布 0.8 版本,正式支持分布式训练,在 100 个 GPU 上仅用 65 小时完成图像分类训练,正确率达 78%,标志着其具备大规模产业应用能力。
2016.6:0.9 版本新增 iOS 平台支持,开启多终端部署布局。
2017.2:发布 1.0 稳定版,核心改进包括性能优化、引入 tf.layers/tf.metrics 高级 API、兼容 Keras 框架,同时保障 Python API 稳定性,大幅降低企业开发门槛。
生态扩张与行业垄断:
2017.12:联合 Cisco、Red Hat 等推出 Kubeflow,简化 TensorFlow 在 Kubernetes 上的部署与运维,强化企业级支持。
这一阶段,TensorFlow 凭借静态计算图的高效优化、完善的文档与工业级工具链,成为 GitHub 最受欢迎的开源 AI 框架,占据市场主导地位,广泛应用于 Google 搜索引擎、自动驾驶等核心业务,以及全球企业的 AI 生产系统。
潜在危机:
1.x 系列的静态图模式需先定义计算图再执行,调试难度大;API 设计繁杂、稳定性不足,为后续 PyTorch 的崛起留下空间。
动态图转型与生态完善(2019 至今):2.x 系列应对竞争与全场景覆盖
2.0 版本的革命性升级(2019.10):
核心变化:引入 Eager Execution 即时执行模式,支持动态图编程,解决了 1.x 调试困难的痛点;将 Keras 设为官方默认高层 API,统一模型构建接口,大幅提升易用性。
性能与兼容性:优化分布式训练效率,支持混合精度训练;保持对 1.x 代码的向下兼容,降低用户迁移成本。
行业反响:被称为 “新时代机器学习平台”,吸引 PyTorch 生态用户回流,成为科研与工业的双重选择。
生态系统全面扩张:
端侧部署:
TensorFlow Lite 成熟,支持移动设备、边缘设备(如物联网终端)的模型压缩与高效推理
应用于三星 Galaxy 手机 AI 相机、特斯拉 Autopilot 实时目标检测等场景。
全流程工具链:
TensorFlow Extended(TFX)提供数据预处理、模型训练、部署、监控的端到端企业级流水线
TensorFlow.js 支持浏览器端 AI 应用开发,TensorFlow Probability 拓展概率编程场景
大模型支持:
优化对大规模预训练模型的支持,Google 曾用 TensorFlow 在 16,000 个 TPU 上训练出 1.6 万亿参数的 Switch Transformer
适配大模型时代的训练与部署需求
持续迭代与行业共生:
版本更新:2021 年发布 2.4.1 稳定版,后续持续优化性能、修复漏洞,保持框架稳定性
竞争与互补:与 PyTorch 形成 “双雄并立” 格局,TensorFlow 仍以工业级部署能力、多平台兼容性为核心优势,PyTorch 则在科研快速迭代场景更具优势,行业逐渐形成 “PyTorch 研发、TensorFlow 部署” 的混合架构模式
eager ˈiːɡə(r) 热切的,渴望的,渴求的
pilot ˈpaɪlət 飞行员;领航员;(船只的)领航员;(电视)试播节目;常燃小火;航海手册;<非正式>职业骑师;<古>向导;(火车头前端的)排障器
发展核心逻辑总结
TensorFlow 的历程本质是 “技术适配需求” 的演进:
从内部工具 DistBelief 满足 Google 自身大规模训练需求,到 1.x 系列以静态图占领工业级市场,再到 2.x 系列以动态图转型应对科研用户需求,最终形成 “科研 - 生产 - 端侧” 全场景覆盖的生态体系
其核心竞争力始终围绕 “兼容性(多平台、多硬件)、效率(分布式、性能优化)、易用性(API 统一、调试友好)” 三大维度,成为 AI 技术从实验室走向产业落地的关键基础设施
TensorFlow的概念
张量(Tensor)
张量是 TensorFlow 中数据的基本单位,可理解为 “多维数组”,用于表示数据的维度和数值
维度(阶数):
- 0 维是标量(如 3.14)
- 1 维是向量(如 [1, 2, 3])
- 2 维是矩阵(如 [[1,2],[3,4]])
- 更高维则是多维数组(如图片的 [height, width, channels])
动态形状与静态形状:
静态形状是创建时定义的维度(可能部分未知),动态形状是运行时实际的维度
计算图(Computational Graph)
计算图是 TensorFlow 中 “定义计算流程” 的抽象表示,是 TensorFlow 所有运算的 “骨架”
由 节点(Nodes) 和 边(Edges) 组成有向无环图(DAG):
- 节点:表示操作(如加法、矩阵乘法、激活函数等)
- 边:表示节点之间的数据流动(即张量)
特点:
定义与执行分离:先定义图(“构建阶段”,即运算逻辑),再通过会话执行图中的操作(“运行阶段”,即执行计算)
可优化:图可被自动优化(如并行计算、内存复用),适合分布式训练
注意:
TensorFlow 2.x 虽支持动态图,但底层仍依赖计算图优化
核心优势:
- 并行化与分布式支持:计算图可自动分析独立节点(无依赖关系的运算),将其分配到不同设备或进程中并行执行,是大规模深度学习(如千亿参数模型)的基础
- 可移植性:定义好的计算图可序列化(如保存为
.pb文件),无需依赖原代码,直接在服务器、移动端、嵌入式设备上部署(如 TensorFlow Lite)
会话(Session)
会话是执行计算图的环境,负责分配资源(如 CPU/GPU)并运行操作
作用:将计算图的节点在具体设备上执行,返回张量的实际值
示例(旧版 TensorFlow 1.x):
import tensorflow as tf
a = tf.constant(2)
b = tf.constant(3)
c = a + b
with tf.Session() as sess:print(sess.run(c)) # 输出 5
注意:TensorFlow 2.x 已默认启用 “即时执行(Eager Execution)”,无需显式会话,更接近 Python 原生语法
变量(Variable)
变量是用于存储和更新模型参数(如权重、偏置)的张量,在训练过程中会被持续修改
必须初始化后才能使用(2.x 中可自动初始化),常通过 tf.Variable() 创建
示例:
w = tf.Variable(tf.random.normal([3, 2])) # 初始化一个 3x2 的随机矩阵作为权重
Variable是TensorFlow的一种特殊Tensor,用来表示可训练参数
占位符(Placeholder,TF1.x)
TF1.x 中用于 “预留输入数据的位置”,运行时通过 feed_dict 传入实际数据,类似函数的参数
TF2.x 因即时执行机制,已移除占位符,直接使用 Python 变量即可
Placeholder是TensorFlow的一种特殊Tensor,用来表示输入数据
Placeholder可以在Graph中定义,然后在Session中传递实际的输入数据
操作(Operation,Op)
计算图中的节点即为操作,代表一种具体的计算(如加减乘除、卷积、池化、激活函数等)
操作可以接收张量作为输入,输出新的张量
自动微分(Automatic Differentiation)
深度学习的核心是通过梯度下降最小化损失函数(如 MSE、交叉熵),而梯度计算的效率直接决定训练速度
TensorFlow 无需手动推导导数公式,而是通过反向模式自动微分(Reverse-Mode Autodiff) 高效计算所有参数的梯度,这是其支持复杂模型(如 CNN、Transformer)训练的关键
differentiation ˌdɪfəˌrenʃiˈeɪʃn 区分,差异化
gradient ˈɡreɪdiənt (尤指道路或铁路的)斜坡,坡度;(温度或压力变化的)梯度;(数学)斜率;梯度,梯度率;(数学)梯度算子
TensorFlow 提供自动计算导数的机制,是反向传播(训练神经网络的核心)的基础
通过 tf.GradientTape 记录计算过程,再求解梯度:
x = tf.Variable(3.0)
with tf.GradientTape() as tape:y = x **2
dy_dx = tape.gradient(y, x) # 求 y 对 x 的导数,结果为 6.0
自动微分的原理:“计算图反向遍历”
自动微分的本质是 “链式法则” 的工程化实现,分为前向传播(Forward Pass) 和反向传播(Backward Pass) 两步
数据集(Dataset)
用于高效处理输入数据的 API,支持批量读取、预处理(如打乱、映射)、迭代等,适合大规模数据
dataset = tf.data.Dataset.from_tensor_slices([1, 2, 3, 4])
for element in dataset:print(element.numpy()) # 输出 1,2,3,4
模型(Model)与层(Layer)
层(Layer)是神经网络的基本组件,封装了一组操作和变量(如 Dense 全连接层、Conv2D 卷积层)
模型(Model)由多个层组合而成,通过 tf.keras.Model 或 tf.keras.Sequential 构建,提供训练(fit)、评估(evaluate)等接口
高效执行的核心:计算优化与设备调度
TensorFlow 能支撑大规模模型训练(如 GPT、BERT),关键在于底层的计算优化和跨设备调度能力,核心依赖以下技术:
计算优化:减少冗余运算
算子融合(Operator Fusion):
将多个独立小运算(如 “加法 + 激活函数”、“卷积 + 批归一化”)融合为一个大算子,减少内存读写开销(内存访问速度远慢于计算速度)
例如,tf.nn.relu(tf.add(x, b)) 会被融合为一个 加法 - relu 算子
常量折叠(Constant Folding):
在图编译阶段,提前计算所有常量参与的运算(如 2+3、W·常量矩阵),将结果存储为常量,避免 runtime 重复计算
稀疏计算优化:
对稀疏张量(如自然语言处理中的 one-hot 向量)提供专用算子(如 tf.sparse.matmul),仅计算非零元素,减少计算量
设备调度,充分利用硬件资源,支持自动将计算图分配到 CPU、GPU、TPU 等设备执行,核心通过 tf.device() 或自动设备 placement 实现
- GPU 加速:将矩阵乘法、卷积等计算密集型运算分配到 GPU(并行计算能力远超 CPU),而数据预处理、控制逻辑等分配到 CPU
- 多 GPU 分布式训练:通过 tf.distribute.MirroredStrategy 等策略,将模型参数复制到多个 GPU,每个 GPU 处理不同批次的数据(数据并行),大幅提升训练速度
- TPU 支持:针对谷歌 TPU(专用深度学习芯片)优化算子,支持超大规模模型的高效训练(如 TPU v4 支持千亿参数模型的训练)
附录
什么是 TPU
TPU(Tensor Processing Unit,张量处理单元)是由谷歌(Google) 专为加速人工智能(AI)和机器学习(ML)任务设计的专用集成电路(ASIC),核心定位是高效处理 “张量”(机器学习中数据运算的核心格式),尤其针对深度学习模型的训练与推理场景优化。
TPU 的核心定位:为 “深度学习” 而生
传统通用处理器(如 CPU、GPU)虽能处理 AI 任务,但存在 “通用性与 AI 效率失衡” 的问题
- CPU 擅长复杂逻辑控制但并行计算能力弱
- GPU 虽提升了并行性但仍需兼容图形渲染等非 AI 任务
- TPU 则是 “量身定制” 的 AI 加速器,所有硬件设计都围绕深度学习的核心需求展开
核心处理对象:张量(Tensor),即多维数组(如图片数据的 “宽 × 高 × 通道数”、文本数据的 “序列长度 × 嵌入维度”),这是深度学习中数据存储和运算的基本单位
核心优化场景:深度学习的两大核心环节
推理(Inference):用训练好的模型对新数据做预测(如手机拍照识别、语音助手理解指令),需低延迟、高吞吐量
训练(Training):用海量数据迭代优化模型参数(如训练 GPT、图像生成模型),需超高并行计算能力和大内存带宽
图片的Channel
图片数据中,“通道”(Channel)是指图像中存储特定类型信息的独立数据层:
颜色通道:
最常见的彩色图像通常由三个颜色通道组成,即红色(R)、绿色(G)和蓝色(B)。
每通道是一个二维矩阵,矩阵中每个元素(像素)是一个 8 位无符号整数,通常范围 0~255,表示该位置对应颜色强度
当这三个通道组合在一起时,就形成了看到的彩色图像
例如,纯红色的像素在红色通道的值为 255,在绿色和蓝色通道的值为 0,即 (255, 0, 0)
Alpha 通道:
用于存储透明度信息,常见于 RGBA 图像格式中
Alpha 通道的值通常也是 0~255,其中 0 表示全透明,255 表示不透明
例如,(255, 0, 0, 128) 表示半透明的红色
深度通道:
存储每个像素的深度信息,如在 3D 图像中,用于表示像素点在三维空间中的位置信息
多光谱或高光谱通道:
在卫星图像、医学影像等领域,图像可能包含多个波段,每个波段都可以被视为一个通道
例如,Landsat 卫星图像可能包含 11 个波段,即 11 个通道,每个波段捕捉不同波长的光,提供不同的地物信息。
文本数据的 “序列长度 × 嵌入维度”
在文本数据的向量表示(尤其是深度学习处理场景,如 Transformer、RNN) 中,“序列长度 × 嵌入维度” 是描述文本向量矩阵的核心维度,两者分别对应文本的 “时序 / 数量特征” 和 “语义 / 特征维度”,共同构成计算机可理解的文本数值形式。
第一个维度:序列长度(Sequence Length)——“文本有多少个基本单位”
序列长度(通常用 L 表示)描述的是:将文本拆分为 “基本语义单元” 后,单元的总数量,本质是文本的 “长度尺度”
- 核心定义:文本的 “离散化单元数”
计算机无法直接处理连续的文本字符串,必须先将文本拆分为最小的、可独立编码的 “基本单元”(称为 “token”)
序列长度就是这些 token 的总数
常见的 token 类型包括:
字(Character):以单个汉字 / 字母为单位(如 “我爱 NLP” 拆分为【我、爱、N、L、P】,序列长度 = 5)
词(Word):以完整词汇为单位(如 “我爱 NLP” 拆分为【我、爱、NLP】,序列长度 = 3)
子词(Subword):介于字和词之间的单位(如英文 “unhappiness” 拆分为【un、happy、ness】,解决生僻词 / 未登录词问题,是 BERT、GPT 等模型的默认选择)
- 关键作用:定义文本的 “时序范围”
深度学习模型中,序列长度决定了模型需要 “处理多少个连续的 token”,比如:
- RNN 会按序列长度逐个 token 传递信息
- Transformer 的自注意力机制会计算 “序列长度 × 序列长度” 的注意力矩阵(每个 token 与其他所有 token 的关联)
- 注意点:序列长度的统一化
真实文本的长度是不固定的(如一条短评可能 10 个词,一篇文章可能 1000 个词),因此在模型训练前必须做长度统一:
- 短文本:用 “填充符(Padding,如 [PAD])” 补到指定长度
- 长文本:截断(Truncation)到指定长度(如 BERT 默认最大序列长度为 512,超过则截断)
第二个维度:嵌入维度(Embedding Dimension)——“每个基本单位有多少个特征”
嵌入维度(通常用 D 表示)描述的是:
每个 token 被编码成的 “数值向量的维度数”,本质是 token 的 “语义特征丰富度”
维度越高,理论上能承载的语义信息越细
-
核心定义:token 的 “语义向量维度”
自然语言中的每个 token(如 “猫”“狗”“开心”)都有其语义(比如 “猫” 关联 “哺乳动物、宠物、有毛” 等特征)
嵌入维度就是用 “多少个数值特征” 来量化这些语义
例如:
若嵌入维度 = 3,“猫” 可能被编码为 [0.2, 0.8, -0.1],其中每个数值代表一个抽象的语义特征
如第一个数值可能对应 “是否为宠物”,第二个对应 “是否为哺乳动物” -
关键作用:决定语义的 “区分度”
嵌入维度过低(如 D=2):不同 token 的向量容易重叠(比如 “猫” 和 “狗” 的向量几乎一样),模型无法区分语义
嵌入维度过高(如 D=1000):虽然语义区分度高,但会导致模型参数爆炸(计算量剧增),还可能引发过拟合 -
常见取值:行业默认经验
不同模型的嵌入维度有默认设计,本质是 “语义需求” 与 “计算成本” 的平衡:
- 轻量级模型(如 TextCNN):D=128~256
- 通用预训练模型(如 BERT-base):D=768
- 大模型(如 BERT-large/GPT-3):D=1024~4096(维度越高,需要的训练数据和计算资源越多)
“序列长度 × 嵌入维度” 的矩阵含义
当文本被编码为向量时,最终会形成一个 L 行 × D 列 的矩阵(或三维张量,批量处理时为【批量大小,L, D】)
假设处理句子 “我喜欢深度学习”:
第一步:分词(确定序列长度 L)拆分为 token:【我、喜欢、深度、学习】→ L=4(序列长度 = 4)
第二步:嵌入编码(确定嵌入维度 D)假设选择 D=5(每个 token 用 5 维向量表示),编码后每个 token 的向量如下:
“我”:[0.12, 0.34, -0.05, 0.21, 0.56]
“喜欢”:[0.78, -0.23, 0.45, -0.11, 0.33]
“深度”:[-0.09, 0.67, 0.22, -0.34, 0.18]
“学习”:[0.51, -0.17, 0.38, 0.49, -0.02]
最终矩阵:4 行 × 5 列这个矩阵就是计算机可处理的文本表示
其中:
每一行:对应一个 token 的语义向量(嵌入维度 D=5 承载的语义特征)
每一列:对应所有 token 在 “某一个语义维度” 上的特征值(如第 2 列可能统一代表 “情感倾向”)
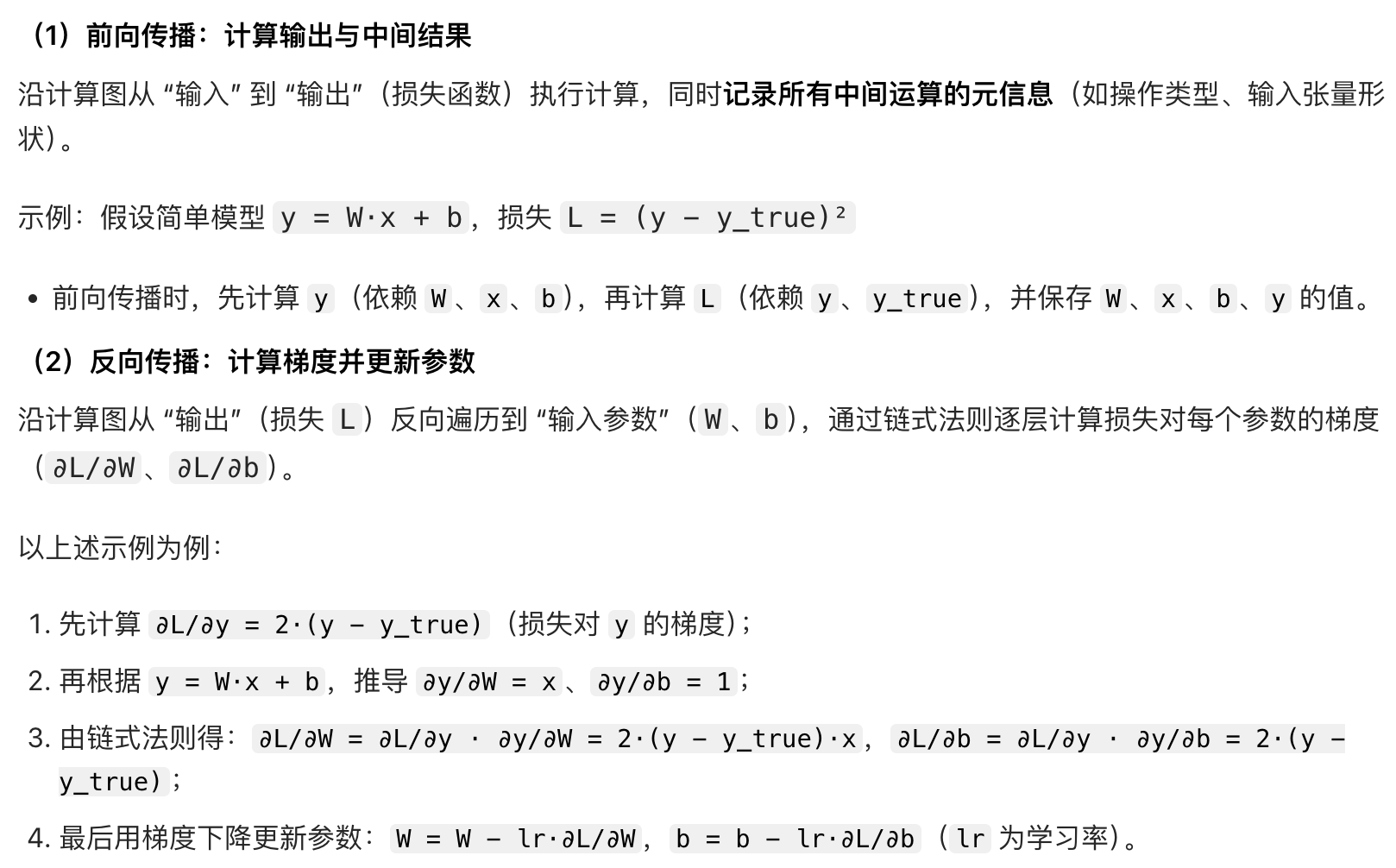
前向传播(算结果)和反向传播(调参数)
前向传播:算出模型的预测值和损失
想象要做一个 “预测房价” 的简单模型
模型的公式是 预测房价 y = 权重W × 房屋面积x + 偏置b
损失 L是用来衡量 “预测房价和真实房价y_true的差距”,这里用的是 L = (y - y_true)²(差距的平方,差距越大损失越大)
前向传播就是一步步计算出 y 和 L,并把中间用到的 W、x、b、y 都记下来:
第一步:用当前的 W、x、b 算出 y = W·x + b(比如 W 是 10,x 是 50,b 是 200,那 y=10×50+200=700)
第二步:用算出的 y 和真实房价y_true(比如真实房价是 750)算出损失L = (700-750)² = 2500
同时,把 W、x、b、y 这些数值都 “保存下来”,后面反向传播要用
反向传播:调整参数让损失变小
反向传播核心是找出 “每个参数(W 和 b)对损失 L 的影响程度”(即梯度),调整参数来降低损失,这个过程靠链式法则和梯度下降实现。
以刚才的例子(y=700,y_true=750,x=50)来一步步看:
步骤 1:算 “损失 L 对预测值 y 的梯度”(∂L/∂y)
梯度可以理解为 “L 对 y 的变化有多敏感”。对 L = (y - y_true)² 求导,得到 ∂L/∂y = 2·(y - y_true)
代入数值:∂L/∂y = 2×(700-750) = -100
步骤 2:算 “预测值 y 对每个参数的梯度”(∂y/∂W、∂y/∂b)
因为y = W·x + b,所以:
对 W 求导:∂y/∂W = x(比如 x 是 50,所以∂y/∂W=50)
对 b 求导:∂y/∂b = 1(因为 b 的系数是 1)
步骤 3:用链式法则算 “损失 L 对每个参数的梯度”(∂L/∂W、∂L/∂b)
链式法则的逻辑是:“L 对 W 的影响” = “L 对 y 的影响” × “y 对 W 的影响”
对 W 的梯度:∂L/∂W = ∂L/∂y × ∂y/∂W = (-100)×50 = -5000
对 b 的梯度:∂L/∂b = ∂L/∂y × ∂y/∂b = (-100)×1 = -100
步骤 4:用梯度下降更新参数(让损失变小)
梯度下降的逻辑是 “参数往梯度的反方向调整”(因为梯度是 “上升最快的方向”,反方向就是 “下降最快的方向”,能让损失 L 变小)
调整的幅度由学习率 lr(可以理解为 “每一步迈多大步”)控制
假设学习率 lr 是 0.001,那么:
W 的更新:W = W - lr×∂L/∂W(比如原来 W 是 10,那新 W=10 - 0.001×(-5000)=10+5=15)
b 的更新:b = b - lr×∂L/∂b(比如原来 b 是 200,那新 b=200 - 0.001×(-100)=200+0.1=200.1)
更新后,下一次前向传播时,用新的 W 和 b 计算 y,损失 L 就会更接近 0(预测更准确)
学习率 lr :
直接沿着梯度反方向调整,步子可能太大(导致震荡)或太小(收敛太慢)
学习率 lr 是用来控制 “调整幅度” 的超参数,它决定了每一步参数更新的 “步长”
总结
前向传播是 “从输入到输出算结果”,反向传播是 “从输出往回算参数的调整方向,然后更新参数”,两者循环进行,直到模型预测足够准确
稀疏张量
sparsity ˈspɑːsətɪ 稀疏,稀少;贫乏
indices ˈɪndɪsiːz 指数、目录、索引(es)
稀疏性(Sparsity):“大部分元素为 0” 的特性
对于一个张量,若其绝大多数元素的值为 0,仅有极少数非零元素,则称该张量具有 “稀疏性”
反之,若大部分元素非零,则称为 “稠密张量(Dense Tensor)”
稀疏性的核心衡量指标是稀疏度:稀疏度 = 1 - (非零元素数量 / 总元素数量)
例如,一个长度为 10000 的 One-Hot 向量(仅 1 个 1,其余 9999 个 0),其稀疏度为 1 - 1/10000 = 99.99%,属于极高稀疏性
稀疏张量的存储与处理:为何不能直接存 “全量 0”?
由于稀疏张量的 0 元素占比极高,若按 “稠密张量” 的方式存储(即保存所有元素),会造成巨大的内存浪费(例如 10 万维的 One-Hot 向量,需存 10 万个浮点数,其中 99999 个是 0)
因此,稀疏张量通常采用 非零元素 + 位置索引 的压缩存储格式,主流格式包括:
- COO(Coordinate Format,坐标格式):存储 3 个列表 ——values(非零元素的值)、row_indices(非零元素的行索引)、col_indices(非零元素的列索引),适合高维稀疏矩阵
- CSR(Compressed Sparse Row,行压缩格式):先按行分组,存储values(非零值)、col_indices(列索引)、row_ptr(每行第一个非零元素在values中的起始位置),适合行优先的计算(如矩阵乘法)
- LIL(List of Lists,列表格式):每行存储一个列表(包含该行的非零元素列索引和值),适合动态修改稀疏张量(如构建词袋矩阵时)
损失函数 - Loss Function
在机器学习和深度学习中,最小化损失函数是模型训练的核心目标
损失函数(Loss Function)衡量模型预测值与真实值之间的差异
最小化损失本质是通过调整模型参数,让这种差异尽可能小,从而提升模型的预测能力
损失函数的值越小,说明模型的预测结果与真实情况越接近,泛化能力(对新数据的预测能力)可能越强(需避免过拟合)
例如:用线性回归预测房价时,若预测值与真实房价的平均误差(MSE)从 100 万降到 10 万,说明模型对房价的估计更准确
常见的损失函数
均方误差(Mean Squared Error, MSE):适用于回归任务
squared skweəd 方格的;成正方形的;带有方格图案的;使成正方形;求平方值;挺直身子;打成平局;贿赂,收买
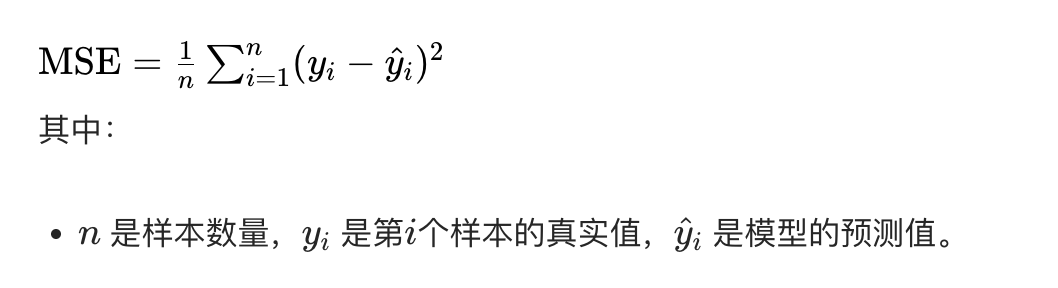
回归任务的目标是预测连续值(如房价、温度),MSE 衡量预测值与真实值的平方差的平均值
- 对 outliers(异常值)敏感(平方会放大误差),适合数据较干净的场景
- 数学性质好(连续、可导),便于用梯度下降等方法优化
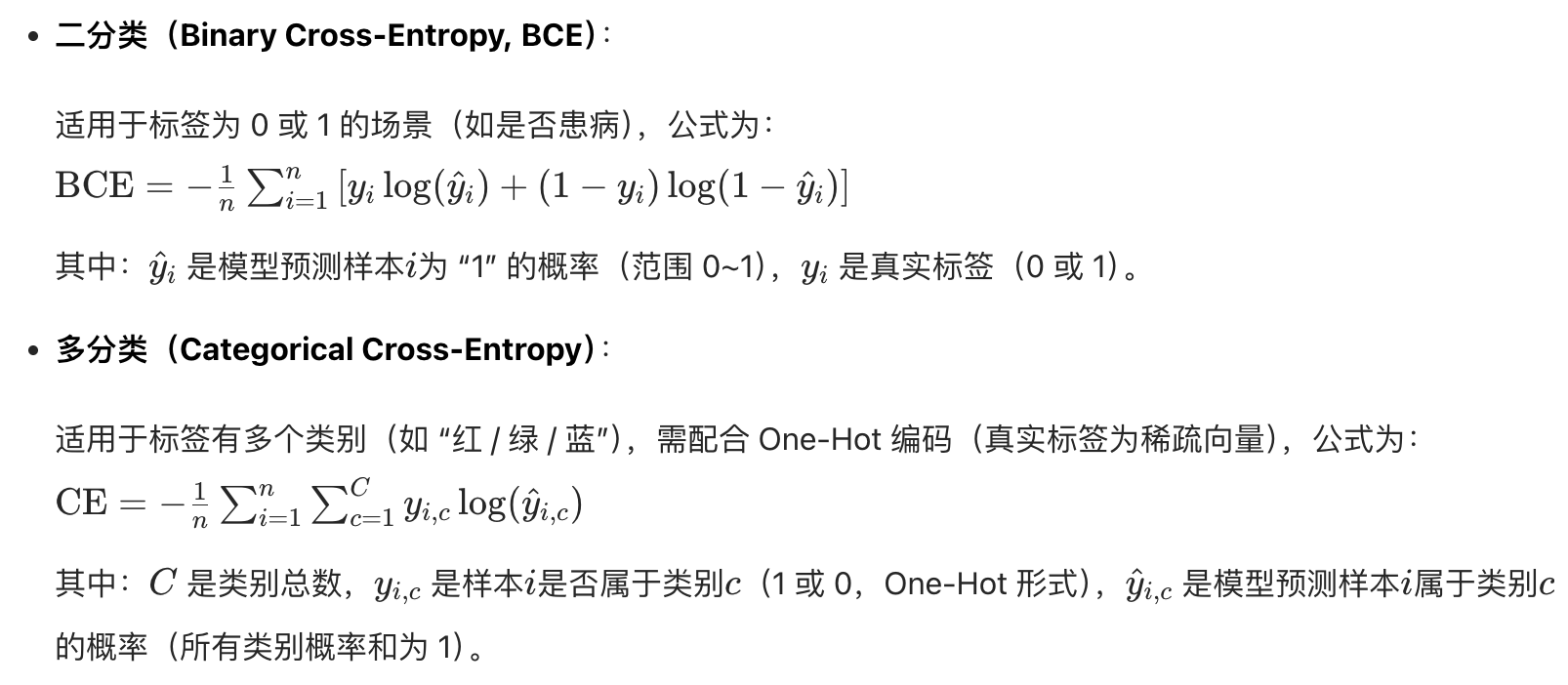
交叉熵(Cross-Entropy):适用于分类任务
entropy ˈentrəpi 熵
stochastic stɒˈkæstɪk [数] 随机的;猜测的
categorical ˌkætəˈɡɒrɪk(ə)l 绝对的(名词categoricalness,副词categorically,异体字categoric);直截了当的;无条件的;属于某一范畴的
momentum məˈmentəm 冲力,推力;动力,势头;动量,冲量
η 伊塔
分类任务的目标是预测离散标签(如 “猫 / 狗”“垃圾邮件 / 正常邮件”),交叉熵衡量两个概率分布(真实标签分布与模型预测的概率分布)的差异,分为二分类和多分类两种形式:
- 直接优化分类概率,收敛速度比 “均方误差 + 分类任务” 更快(避免梯度饱和)
- 对错误预测的惩罚更显著(概率越偏离真实标签,损失越大)
如何最小化损失函数?核心方法:梯度下降
损失函数本质是 “模型参数的函数”(参数决定预测值,进而决定损失)。
最小化损失的过程,就是通过调整参数找到损失函数的最小值点。梯度下降(Gradient Descent) 是最常用的优化方法,核心逻辑如下:
- 梯度下降的基本原理
梯度(Gradient):损失函数对每个参数的偏导数组成的向量,反映损失函数在当前参数点的变化率和方向(梯度指向损失增大最快方向)
更新规则:沿梯度的反方向调整参数(即 “下山”),逐步降低损失:

- 梯度下降的常见变种
根据每次更新参数时使用的样本量不同,衍生出以下变种:
- 批量梯度下降(Batch Gradient Descent):每次用全部样本计算梯度,损失下降稳定但速度慢(适合小数据集)
- 随机梯度下降(Stochastic Gradient Descent, SGD):每次用单个样本计算梯度,速度快但损失波动大(适合大数据集)
- 小批量梯度下降(Mini-Batch Gradient Descent):每次用一小批样本(如 32、64 个)计算梯度,平衡速度和稳定性(深度学习最常用)
- 优化器:梯度下降的升级版
为了加速收敛、避免陷入局部最优,实际训练中会使用更复杂的优化器,它们本质是对梯度下降的改进:
- Momentum(动量):模拟物理中的 “惯性”,积累历史梯度方向,减少震荡(加快收敛)
- Adam:结合动量和自适应学习率(对不同参数用不同步长),在多数场景下表现最优(推荐首选)
- RMSprop、Adagrad:自适应调整学习率,适合稀疏数据或参数更新频率差异大的场景