强化学习推荐系统:不同的探索策略——贪心探索策略(4.1)
阅读《强化学习与大模型推荐系统》应具备一定的深度学习和推荐系统技术基础,适合于对大模型和强化学习推荐技术感兴趣的读者学习参考。
《强化学习与大模型推荐系统》全书下载地址:https://github.com/ByShui/Book_RL-LLM-In-RS。
强化学习推荐系统:不同的探索策略——贪心探索策略(4.1)
一个优秀的探索策略要能够同时满足探索和利用的需求,以下代码构造了一个具有5个动作的策略评估环境,以此来对不同探索策略的累计遗憾值进行分析:
class Bandit:def __init__(self, arm_count):self.arm_count = arm_countself.generate_arms()def generate_arms(self):self.arms = []for _ in range(self.arm_count):mean = np.random.normal(0, 1)std_dev = np.random.uniform(0.5, 1.5)self.arms.append((mean, std_dev))def reward(self, arm):mean, std_dev = self.arms[arm]return np.random.normal(mean, std_dev)def optimal_arm(self):return np.argmax([mean for mean, _ in self.arms])if __name__ == "__main__":arm_count = 5bandit = Bandit(arm_count)
具体来说,策略评估环境中设置了5个臂,摇动臂的奖励rewarda\text{reward}_arewarda服从不同的正态分布:rewarda=N(μ,σ)\text{reward}_a=\mathcal{N}(\mu,\sigma)rewarda=N(μ,σ)其中,μ\muμ和σ\sigmaσ分别是正态分布的均值和方差,它们是随机生成的。定义拥有最大均值的动作是最优动作a∗a_*a∗,最优价值V∗V_*V∗从最优臂的价值分布中采样得到。
优化策略需要牺牲短期利益,因为需要通过探索搜集更多的信息以获得更优的动作,使得智能体最终能够获得更多回报。探索和利用是强化学习中的一对矛盾体,这意味着在学习过程中,智能体需要在已知和未知的情况下做出最优的决策。
其中,利用是指在已知情况下选择已知最优的策略来获得收益,而探索是指在未知情况下,为了获取更多的信息和收益,选择不同的策略进行尝试。
探索是指在不确定性的环境中,探索新的策略或动作来获得更高的奖励或效用,包含两个部分:一是尝试未知的行为,以期找到更好的策略并更新模型;二是平衡已知和未知的行为,以确保不会错过可能的好策略。
在推荐系统中,探索可以包括推荐新的项目、向用户提供个性化的推荐建议或者探索不同的推荐策略(如多臂机)。探索和利用需要平衡,以确保推荐系统具有长期的优化效果。
一个标准的强化学习算法包括探索和利用两个步骤——探索帮助智能体充分了解其状态空间,利用则帮助智能体找到最优的动作序列。
用来平衡探索和利用的方法包括:贪心探索策略、高斯探索策略、UCB探索策略、玻尔兹曼探索策略、汤普森采样探索策略和熵正则化探索策略等,本篇博客我们介绍一下贪心探索策略。
1. 贪心探索策略
MAB中的贪心策略指对贪心策略添加噪声的策略,如ϵ\epsilonϵ-贪心策略、衰减ϵt\epsilon_tϵt-贪心策略。
(1)ϵ\epsilonϵ-贪心策略。 原始的贪心策略每次只选择已知的最优动作,这导致探索不足,有可能锁死在一个次优的动作上。ϵ\epsilonϵ-贪心策略设定了一个固定的探索率ϵ∈[0,1]\epsilon\in [0,1]ϵ∈[0,1],让智能体在每次选择动作时以ϵ\epsilonϵ的概率选择其他动作(探索),以1−ϵ1-\epsilon1−ϵ的概率选择当前的最优动作(利用):at={arg maxa∈AQt(a)P(1−ϵ)otherwiseP(ϵ)a_t = \begin{cases} \argmax_{a\in A} Q_t(a) & P(1-\epsilon) \\ \text{otherwise} & P(\epsilon) \end{cases}at={argmaxa∈AQt(a)otherwiseP(1−ϵ)P(ϵ)
如下代码实现了ϵ\epsilonϵ-贪心策略:
def epsilon_greedy(bandit, T, epsilon):arm_count = bandit.arm_countQ = np.zeros(arm_count)N = np.zeros(arm_count)cumulative_regret = [0]for t in range(1, T+1):if np.random.rand() < epsilon:arm = np.random.randint(arm_count)else:arm = np.argmax(Q)reward = bandit.reward(arm)N[arm] += 1Q[arm] += (reward - Q[arm]) / N[arm]optimal_reward = bandit.reward(bandit.optimal_arm())cumulative_regret.append(cumulative_regret[-1] + (optimal_reward - reward))return cumulative_regretif __name__ == "__main__":arm_count = 5T = 1000bandit = Bandit(arm_count)cumulative_regret_epsilon_greedy = epsilon_greedy(bandit, T, epsilon=0.1)
以上代码定义了epsilon_greedy()方法,它接收3个参数:
- bandit(一个多臂机实例);
- T(试验轮次,即在多臂机上探索/利用的轮次);
- epsilon(探索率,取值范围为0~1,它是一个用于平衡探索与利用的超参数)。
数组Q和N分别用于存储每个臂的平均奖励和被摇动的次数。随后执行T轮试验,在每轮试验中,智能体以epsilon的概率进行探索,以1-epsilon的概率进行利用。每轮试验结束后,更新所选臂的被摇动的次数和平均奖励,其中,平均奖励是通过一种常见的增量平均方法来计算的。最后计算累计遗憾值,将其添加到累计遗憾列表中,在这个过程中,最优臂是已知的,但最优价值依然从最优臂的价值分布中采样得到。
(1)衰减ϵt\epsilon_tϵt-贪心策略。 尽管ϵ\epsilonϵ-贪心策略兼顾了探索与利用,但它永远无法收敛到最优解,因为它总按照一个的固定概率执行探索,不能每次都利用最优动作。衰减ϵt\epsilon_tϵt-贪心策略就是为了解决这个问题而产生的。
设动作aaa的价值与最优价值的差值为:Δa=V∗−Qt(a)\Delta_a=V_*-Q_t(a)Δa=V∗−Qt(a)
则当前的最优动作的价值与最优价值之间的差值可以表示为:d=minΔa∈AΔad=\min_{\Delta_a\in A}\Delta_ad=Δa∈AminΔa
那么,当前时间步的探索率就可以表示为:ϵt=min{1,c∣A∣d2t}\epsilon_t=\min\{1,\frac{c|A|}{d^2t}\}ϵt=min{1,d2tc∣A∣}其中,ccc是权重超参数,∣A∣|A|∣A∣是臂的数量,即项目的数量。
得到探索率ϵt\epsilon_tϵt后,就可以利用ϵ\epsilonϵ-贪心策略的公式进行动作选择了。探索率ϵt\epsilon_tϵt会随着时间以1/t1/t1/t的速率减小,遗憾值呈现与时间步的对数关系,即∫0∞(1/t)dt=ln∣t∣\int_{0}^{\infty} (1/t) \, \text{d}t=\ln|t| ∫0∞(1/t)dt=ln∣t∣这意味着该探索策略将会收敛地很快,这个收敛速度主要受差值ddd影响,在实践中还有两种设置方法:
- 设置为一个超参数,由人工手动调参;
- 设置为最优动作与次优动作之间的价值差。这种设置方法来源于这样一个思想,最优动作与次优动作之间的价值差距越大,表示最优策略更容易区分,此时 应当衰减得更快,以便更多地选择最优动作;反之,如果差距较小就表示最优策略不容易区分,此时探索率应当衰减得慢一些,以便增加探索的机会。
如下代码实现了衰减ϵt\epsilon_tϵt-贪心策略:
def decay_epsilon_greedy(bandit, T, c=0.1):arm_count = bandit.arm_countQ = np.zeros(arm_count)N = np.zeros(arm_count)cumulative_regret = [0]for t in range(1, T+1):d = min(bandit.reward(bandit.optimal_arm()) - Q)epsilon_t = min(1, c * arm_count / (d**2 * (t + 1)))if np.random.rand() < epsilon_t:arm = np.random.randint(arm_count)else:arm = np.argmax(Q)reward = bandit.reward(arm)N[arm] += 1Q[arm] += (reward - Q[arm]) / N[arm]optimal_reward = bandit.reward(bandit.optimal_arm())cumulative_regret.append(cumulative_regret[-1] + (optimal_reward - reward))return cumulative_regretif __name__ == "__main__":arm_count = 5T = 1000bandit = Bandit(arm_count)cumulative_regret_decay_epsilon_greedy = decay_epsilon_greedy(bandit, T, c=0.1)
以上代码定义了decay_epsilon_greedy()方法,它接收三个参数:
- bandit,一个多臂机实例;
- T,试验轮次,即在多臂机上探索/利用多少轮;
- c,超参数,用于调整衰减速度。较大的c值将导致衰减速度降低,从而增加探索的可能性;较小的c值将导致衰减速度加快,减少探索的可能性。
我们在每轮试验中根据当前时间步的探索率ϵt\epsilon_tϵt计算当前的衰减探索率 ,并执行ϵt\epsilon_tϵt-贪心策略。
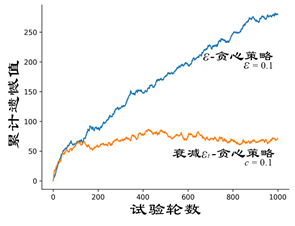
为了更好地观察两种探索策略的效果,上面的图分别绘制了ϵ\epsilonϵ-贪心策略和衰减ϵt\epsilon_tϵt-贪心策略试验1000轮次后的累计遗憾值曲线,从图中可以看出两种探索策略在50轮左右的累计遗憾值变化幅度放缓,这说明它们此时都找到了最优臂。但是,ϵ\epsilonϵ-贪心策略的累计遗憾值依然在不断增长,这是因为它总是保持了一定的探索几率。相比之下,衰减ϵt\epsilon_tϵt-贪心策略的累计遗憾值在200轮左右就达到了收敛状态,此后仅在小范围内波动,这是因为探索率ϵt\epsilon_tϵt快速衰减,从200轮左右开始就不再执行探索。