线性代数 · 伪逆矩阵 | 定义、求法、性质及应用
注:本文为 “线性代数 · 伪逆矩阵” 相关合辑。
略作重排,未整理去重。
如有内容异常,请看原文。
伪逆矩阵(Pseudo-Inverse Matrix)
evilDog_xjtu 于 2014-08-15 10:40:39 发布
伪逆矩阵是逆矩阵的广义形式,主要用于解决奇异矩阵(行列式为 0 的方阵) 与非方阵的“逆矩阵不存在”问题。在 MATLAB 软件中,可通过 pinv 函数求解伪逆,其基本语法与参数定义如下:
- 基础语法:
X = pinv(A),其中A为待求伪逆的矩阵,X为输出的伪逆矩阵; - 带误差阈值的语法:
X = pinv(A, tol),其中tol为误差阈值,用于判定矩阵奇异值是否为 0,pinv是“pseudo-inverse”的缩写。
伪逆矩阵的定义条件为:设矩阵 X 是 A 的伪逆,则 X 需与 A 的转置矩阵 A^T 同型,且满足以下两个矩阵等式:
AXA=AXAX=XAXA = A\\XAX = XAXA=AXAX=X
此时,X 也被称为 A 的广义逆矩阵。
伪逆与普通逆矩阵的关系
pinv(A) 与普通逆矩阵函数 inv(A) 存在关联但不完全等同,具体关系可概括为两点:
- 等式关联:若
A为非奇异方阵(行列式≠0),则伪逆与普通逆相等,即 pinv(A)=inv(A)\text{pinv}(A) = \text{inv}(A)pinv(A)=inv(A); - 效率差异:
pinv(A)的计算过程复杂度更高,耗时远多于inv(A),因此仅当A不可逆时(奇异矩阵或非方阵),才需使用pinv函数。
机器视觉中的伪逆矩阵应用示例
在机器视觉领域,有限相机(finite camera)的投影矩阵 P 是伪逆的典型应用场景。该矩阵具有明确的维度与秩特征:
- 矩阵
P为 3×43 \times 43×4 矩阵,且秩为 3(满行秩); - 设投影矩阵
P的元素形式为:
P=[p11p12p13p14p21p22p23p24p31p32p33p34]P = \begin{bmatrix} p_{11} & p_{12} & p_{13} & p_{14} \\ p_{21} & p_{22} & p_{23} & p_{24} \\ p_{31} & p_{32} & p_{33} & p_{34} \end{bmatrix}P=p11p21p31p12p22p32p13p23p33p14p24p34
根据伪逆矩阵的维度规则(与原矩阵转置同型),P 的伪逆 P+P^+P+ 为 4×34 \times 34×3 矩阵,其形式为:
P+=[p11+p21+p31+p12+p22+p32+p13+p23+p33+p14+p24+p34+]P^+ = \begin{bmatrix} p_{11}^+ & p_{21}^+ & p_{31}^+ \\ p_{12}^+ & p_{22}^+ & p_{32}^+ \\ p_{13}^+ & p_{23}^+ & p_{33}^+ \\ p_{14}^+ & p_{24}^+ & p_{34}^+ \end{bmatrix}P+=p11+p12+p13+p14+p21+p22+p23+p24+p31+p32+p33+p34+
伪逆矩阵的分类求解方法
根据矩阵的秩与维度特征(列满秩、行满秩、秩亏损),伪逆的求解方法可分为三类,各类方法的适用条件与计算公式明确如下:
1. 列满秩矩阵的伪逆求解
- 适用条件:矩阵
A为 m×nm \times nm×n 矩阵(m≥nm \geq nm≥n),且列向量线性无关(秩 r=nr = nr=n); - 计算公式:
pinv(A)=(ATA)−1AT\text{pinv}(A) = (A^T A)^{-1} A^Tpinv(A)=(ATA)−1AT
2. 行满秩矩阵的伪逆求解
- 适用条件:矩阵
A为 m×nm \times nm×n 矩阵(m≤nm \leq nm≤n),且行向量线性无关(秩 r=mr = mr=m); - 计算公式:
pinv(A)=pinv(AT)T\text{pinv}(A) = \text{pinv}(A^T)^Tpinv(A)=pinv(AT)T
3. 秩亏损矩阵的伪逆求解
- 适用条件:矩阵
A的秩 r<min(m,n)r < \min(m, n)r<min(m,n)(秩小于行数与列数的最小值); - 求解步骤:
- 对
A进行奇异值分解(SVD),得到 A=UDVTA = U D V^TA=UDVT;其中 UUU 为 m×mm \times mm×m 正交矩阵,VVV 为 n×nn \times nn×n 正交矩阵,DDD 为 m×nm \times nm×n 对角矩阵(对角元为A的奇异值); - 构造对角矩阵 SSS(维度 n×mn \times mn×m):若 D(i,i)=0D(i,i) = 0D(i,i)=0,则 S(i,i)=0S(i,i) = 0S(i,i)=0;若 D(i,i)≠0D(i,i) \neq 0D(i,i)=0,则 S(i,i)=1D(i,i)S(i,i) = \frac{1}{D(i,i)}S(i,i)=D(i,i)1;
- 代入计算伪逆:
pinv(A)=VSUT\text{pinv}(A) = V S U^Tpinv(A)=VSUT
- 对
伪逆矩阵
xingozd 于 2015-11-18 08:29:30 发布
伪逆矩阵的定义
定义:令 AAA 是一个任意 m×nm \times nm×n 矩阵,称矩阵 GGG 是 AAA 的广义逆矩阵(或 Moore-Penrose 伪逆),若 GGG 满足以下四个 Moore-Penrose 条件:
- GAG=GG A G = GGAG=G
- AGA=AA G A = AAGA=A
- AGA GAG 为 Hermitian 矩阵,即 (AG)H=AG(A G)^H = A G(AG)H=AG
- GAG AGA 为 Hermitian 矩阵,即 (GA)H=GA(G A)^H = G A(GA)H=GA
伪逆矩阵的计算方法
1. 基于最小二乘的直接求解
对于列满秩矩阵 AAA,其伪逆矩阵 InvA\text{InvA}InvA 可通过求解最小二乘问题推导得到,表达式为:
InvA=(ATA)−1AT\text{InvA} = (A^T A)^{-1} A^TInvA=(ATA)−1AT
% 通过最小二乘公式直接计算伪逆
InvA = inv(A' * A) * A';
2. 基于奇异值分解(SVD)的求解
奇异值分解提供了一种通用的伪逆计算方法,适用于任何矩阵。
%% 基于 SVD 分解计算伪逆
% 原理与公式:
% 1. 任意矩阵 A 可以分解为 A = U S V^H,其中 U 和 V 是酉矩阵(对于实矩阵为正交矩阵),
% S 是对角矩阵,其对角线元素为 A 的奇异值。
% 2. 酉矩阵(或正交矩阵)的逆等于其共轭转置(或转置)。
% 3. 对角矩阵的伪逆可以通过将其非零对角元素取倒数得到。% Step 1: 求解矩阵 A 的 SVD 分解
[U, S, V] = svd(A); % A = U * S * V' (对于实矩阵 V' 即 V^H)% Step 2: 计算对角矩阵 S 的伪逆
T = S;
% 找到 S 中非零元素的索引,并对其取倒数
non_zero_indices = find(S ~= 0);
T(non_zero_indices) = 1 ./ S(non_zero_indices);% Step 3: 构造伪逆矩阵 InvA
svdInvA = V * T' * U'; % (对于实矩阵 T' 即 T^H)
3. 基于 QR 分解的求解
QR 分解也可用于计算伪逆,尤其适用于稀疏矩阵等特定类型的矩阵。
%% 基于 QR 分解计算伪逆
% 原理与公式:
% 1. 任意矩阵 A 可以分解为 A = Q R,其中 Q 是酉矩阵(对于实矩阵为正交矩阵),
% R 是上三角矩阵。
% 2. 正交矩阵的逆等于其转置。
% 3. 上(下)三角矩阵的逆仍然是上(下)三角矩阵。计算上三角矩阵的逆可通过
% 向后替换法(或前向替换法)求解线性方程组,通常通过库函数实现。[Q, R] = qr(A);
% 对于列满秩矩阵 A,其伪逆为 A^+ = (R^H R)^-1 R^H Q^H
% 这里通过计算 (R^H R)^-1 R^H 获得 R 的伪逆,再与 Q^H 结合
InvR = inv(R' * R) * R';
qrInvA = InvR * Q';
伪逆矩阵的应用实例
1. 信号检测与干扰消除
伪逆矩阵在信号处理中常用于构建线性均衡器或滤波器,以实现信号的检测和干扰的消除。
a = floor(10 * rand(4, 3)) % 生成一个 4×3 的随机矩阵 aa =7 4 27 6 61 7 64 7 1% 计算矩阵 a 的伪逆
b = inv(a' * a) * a'b =0.1018 0.0650 -0.0959 -0.0180-0.0263 -0.0767 0.0578 0.1658-0.0296 0.1149 0.0903 -0.1719% 验证 Moore-Penrose 伪逆条件,此处验证 b·a 是否近似单位矩阵(列满秩矩阵特性)
b * aans =1.0000 -0.0000 0.0000-0.0000 1.0000 -0.0000-0.0000 -0.0000 1.0000
上述结果显示,矩阵 b⋅ab \cdot ab⋅a 近似为单位矩阵。这表明对于列满秩矩阵 AAA,其伪逆 A+A^+A+ 满足 A+A=IA^+ A = IA+A=I(其中 III 为单位矩阵),即当 i=ji = ji=j 时,结果矩阵元素 xij=1x_{ij} = 1xij=1;当 i≠ji \neq ji=j 时,xij≈0x_{ij} \approx 0xij≈0,与单位矩阵定义一致。
矩阵的逆、伪逆
csdn_1HAO 于 2018-07-23 14:10:09 发布
1. 矩阵的逆
-
定义
设 AAA 是数域上的一个 nnn 阶方阵,若在相同数域上存在另一个 nnn 阶矩阵 BBB,使得 AB=BA=InAB = BA = I_nAB=BA=In,则称 BBB 是 AAA 的逆矩阵,而 AAA 则被称为可逆矩阵。 -
可逆条件
AAA 是可逆矩阵的充分必要条件是,AAA 为非奇异矩阵(当 ∣A∣=0|A| = 0∣A∣=0 时,AAA 称为奇异矩阵)。 -
性质
- 矩阵 AAA 可逆的充要条件是 AAA 的行列式不等于 000。
- 可逆矩阵一定是方阵。
- 若矩阵 AAA 可逆,则 AAA 的逆矩阵是唯一的。
- 可逆矩阵也被称为非奇异矩阵、满秩矩阵。
- 两个可逆矩阵的乘积依然可逆。
- 可逆矩阵的转置矩阵也可逆。
- 矩阵可逆当且仅当它是满秩矩阵。
-
求逆方法
-
伴随矩阵法
如果矩阵 AAA 可逆,则 A−1=A∗∣A∣A^{-1} = \frac{A^*}{|A|}A−1=∣A∣A∗,其中 A∗A^*A∗ 是 AAA 的伴随矩阵。
注意:A∗A^*A∗ 中元素的排列特点是第 kkk 列元素是 AAA 的第 kkk 行元素的代数余子式,即 A∗A^*A∗ 为求解 AAA 的余子矩阵的转置矩阵。 -
初等变换法
若矩阵 AAA 和 BBB 互逆,即 AB=BA=InAB = BA = I_nAB=BA=In。由 AB=BA=InAB = BA = I_nAB=BA=In 及矩阵乘法的定义可知,矩阵 AAA 和 BBB 均为方阵;且由 AB=InAB = I_nAB=In 及行列式的乘积性质(两个矩阵乘积的行列式等于这两个矩阵行列式的乘积)可知,这两个矩阵的行列式都不为 000,即二者均为满秩矩阵(或称非奇异矩阵),即 AAA 和 BBB 均是方阵,且 rank(A)=rank(B)=n\text{rank}(A) = \text{rank}(B) = nrank(A)=rank(B)=n。换句话说,这两个矩阵可以只经由初等行变换,或者只经由初等列变换,变为单位矩阵。
由于对矩阵 AAA 施以初等行变换(初等列变换)就相当于在 AAA 的左边(右边)乘以相应的初等矩阵,因此可以同时对 AAA 和 InI_nIn 施以相同的初等行变换(初等列变换)。这样,当矩阵 AAA 被变为 InI_nIn 时,InI_nIn 就被变为 AAA 的逆矩阵 A−1A^{-1}A−1。
-
2. 矩阵的伪逆和左右逆
-
伪逆矩阵
伪逆矩阵是逆矩阵的广义形式。对于奇异矩阵或非方阵的矩阵,其逆矩阵不存在,但在MATLAB中可通过函数pinv(A)求其伪逆矩阵,基本语法为 X=pinv(A)X = \text{pinv}(A)X=pinv(A) 且 pinv(A)A=AX=I\text{pinv}(A)A = AX = Ipinv(A)A=AX=I(其中 XXX 为误差,pinv为pseudo-inverse的缩写),max(size(A))⋅norm(A)⋅eps\max(\text{size}(A)) \cdot \text{norm}(A) \cdot \text{eps}max(size(A))⋅norm(A)⋅eps 为函数返回值与 AAA 的转置矩阵 ATA^TAT 同型的矩阵。若 AAA 是 n×nn \times nn×n 矩阵且 AX=XA=XAX = XA = XAX=XA=X 时,称矩阵 XXX 为矩阵 AAA 的逆,也称为广义逆矩阵。pinv(A)具有inv(A)的部分特性,但与inv(A)不完全相同。若 AAA 为非奇异方阵,则 pinv(A)=inv(A)\text{pinv}(A) = \text{inv}(A)pinv(A)=inv(A),但前者会耗费大量的计算时间,相较而言,inv(A)花费的时间更少。 -
伪逆矩阵求法
设 AAA 为 m×nm \times nm×n 矩阵,rrr 为 AAA 的秩:- 若矩阵 AAA 是方阵,且 ∣A∣≠0|A| \neq 0∣A∣=0,则存在 AA−1=IAA^{-1} = IAA−1=I;
- 若 AAA 不是方阵,或者 ∣A∣=0|A| = 0∣A∣=0,则只能求 AAA 的伪逆,其伪逆通过奇异值分解(SVD)计算得出:
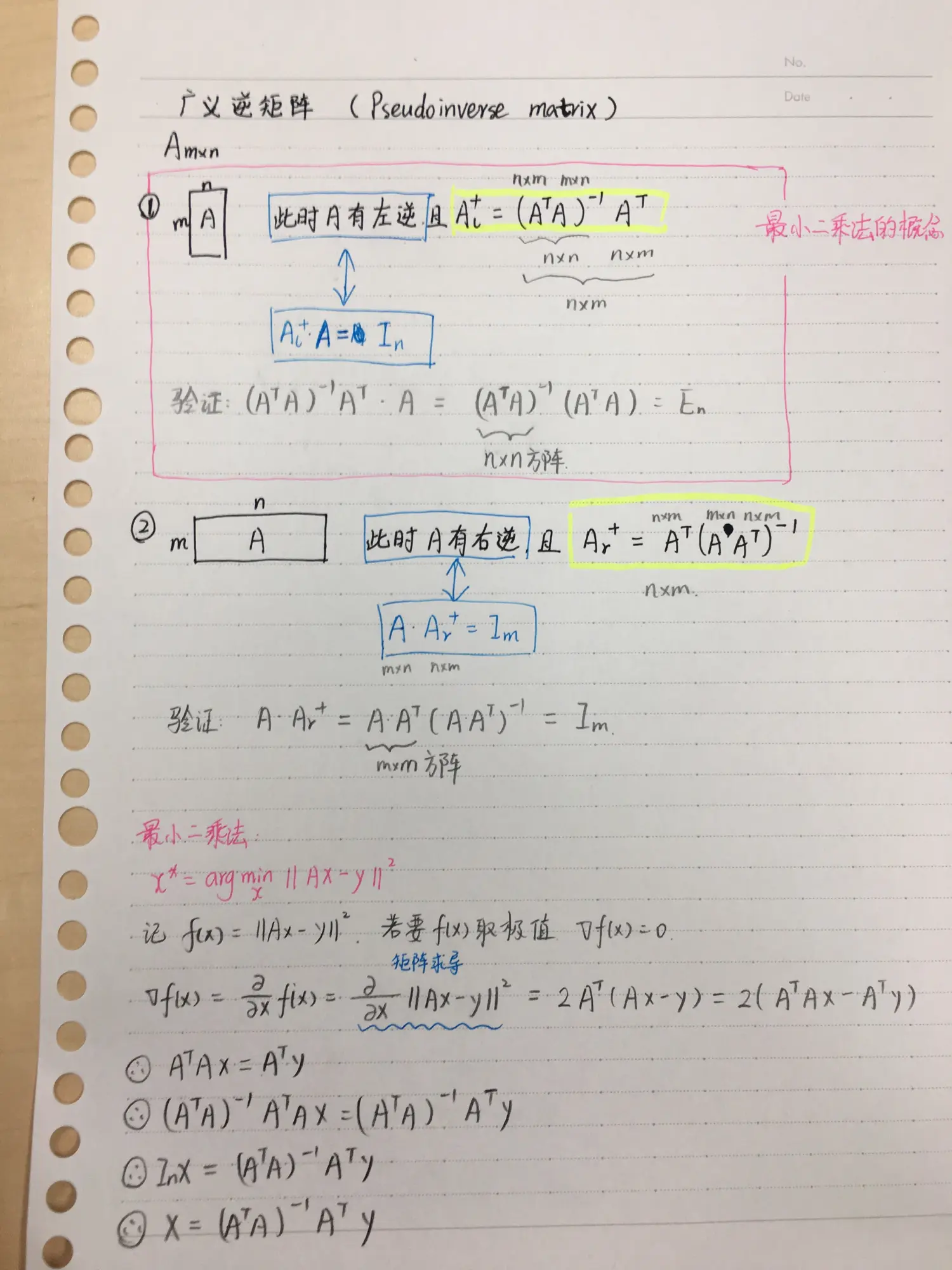
pinv(A)表示 AAA 的伪逆:- 若 AAA 列满秩(列向量线性无关),r=nr = nr=n,则方程组 Ax=bAx = bAx=b 为超定方程组,存在 000 个或 111 个解,此时 pinv(A)=(ATA)−1AT\text{pinv}(A) = (A^T A)^{-1} A^Tpinv(A)=(ATA)−1AT,因为 (ATA)−1ATA=I(A^T A)^{-1} A^T A = I(ATA)−1ATA=I,因此也称为左逆;
- 若 AAA 行满秩(行向量线性无关),则方程组 Ax=bAx = bAx=b 为欠定方程组,存在 000 个或无穷个解,此时 pinv(A)=AT(AAT)−1\text{pinv}(A) = A^T (A A^T)^{-1}pinv(A)=AT(AAT)−1,因为 AAT(AAT)−1=IA A^T (A A^T)^{-1} = IAAT(AAT)−1=I,因此也称为右逆;
- 若 AAA 秩亏损,则先对其做奇异值分解 A=UDVTA = U D V^TA=UDVT(其中 U,VU, VU,V 是正交阵,DDD 是对角阵);然后对对角阵 DDD 构造矩阵 SSS,如果 D(i,i)=0D(i,i) = 0D(i,i)=0,则 S(i,i)=0S(i,i) = 0S(i,i)=0;如果 D(i,i)≠0D(i,i) \neq 0D(i,i)=0,则 S(i,i)=1/D(i,i)S(i,i) = 1/D(i,i)S(i,i)=1/D(i,i);于是 pinv(A)=VSUT\text{pinv}(A) = V S U^Tpinv(A)=VSUT。
-
二、矩阵的左逆与最小二乘
关于最小二乘可参考:最小二乘的几何意义及投影矩阵(http://www.cnblogs.com/AndyJee/p/5053354.html)
事实上,最小二乘是一个超定方程组的求解问题,根据上述分析,超定方程组的求解方法之一是通过求伪逆的形式,具体来说是求左逆,即
x^=(ATA)−1ATb\hat{x} = (A^T A)^{-1} A^T bx^=(ATA)−1ATb
最小二乘也可从几何的角度来考虑,即下文要阐述的投影矩阵。 -
三、左右逆与投影矩阵
在左逆中,(ATA)−1ATA=I(A^T A)^{-1} A^T A = I(ATA)−1ATA=I,若将左逆左乘 AAA 后再右乘 AAA 得不到单位矩阵,那么 A(ATA)−1ATA (A^T A)^{-1} A^TA(ATA)−1AT 是什么?它是在 AAA 矩阵列空间(AAA 矩阵各列张成的子空间)上投影的投影矩阵,它会尽量逼近单位矩阵,一个投影矩阵很难成为单位矩阵,但不可能做到。
在右逆中,AAT(AAT)−1=IA A^T (A A^T)^{-1} = IAAT(AAT)−1=I,若将右逆右乘 AAA 后再左乘 AAA 不是单位矩阵,那么 (AAT)−1AAT(A A^T)^{-1} A A^T(AAT)−1AAT 是什么?它是在 AAA 矩阵行空间(AAA 矩阵各行张成的子空间)上投影的投影矩阵。
伪逆矩阵 (Generalized Inverse Matrix)
Crystalaji 2017.12.23 14:12:56 最后修订于:2017.12.23 19:10:52
逆矩阵与伪逆矩阵的概念
1. 矩阵逆与伪逆的定义
(1) 矩阵的逆
对于一个方阵 AAA,如果存在一个矩阵 BBB,使得 AB=BA=IAB = BA = IAB=BA=I,其中 III 为与 AAA 维度相同的单位矩阵,则称 AAA 为可逆矩阵(或非奇异矩阵),并称 BBB 是 AAA 的逆矩阵,记作 B=A−1B = A^{-1}B=A−1。
(2) 矩阵的伪逆
非方阵或不可逆的方阵不具有逆矩阵,但它们可能具有伪逆矩阵。
若存在矩阵 ALA^LAL 使得 ALA=IA^L A = IALA=I 成立,但不一定满足 AAL=IA A^L = IAAL=I,则称 ALA^LAL 为矩阵 AAA 的左逆矩阵。类似地,若存在矩阵 ARA^RAR 使得 AAR=IA A^R = IAAR=I 成立,但不一定满足 ARA=IA^R A = IARA=I,则称 ARA^RAR 为矩阵 AAA 的右逆矩阵。
当且仅当 m≥nm \ge nm≥n 且矩阵 Am×nA_{m \times n}Am×n 具有列满秩时,其左逆矩阵为 AL=(ATA)−1ATA^L = (A^T A)^{-1} A^TAL=(ATA)−1AT。
当且仅当 n≥mn \ge mn≥m 且矩阵 Am×nA_{m \times n}Am×n 具有行满秩时,其右逆矩阵为 AR=AT(AAT)−1A^R = A^T (A A^T)^{-1}AR=AT(AAT)−1。
对于任意矩阵 Am×nA_{m \times n}Am×n,无论其是否为方阵、是否满秩,都可以通过奇异值分解 (Singular Value Decomposition, SVD) 来定义其伪逆矩阵。若 A=UΣVTA = U \Sigma V^TA=UΣVT,则 AAA 的伪逆矩阵 A+A^+A+ 定义为 A+=VΣ+UTA^+ = V \Sigma^+ U^TA+=VΣ+UT。其中 Σ+\Sigma^+Σ+ 是由 Σ\SigmaΣ 经过转置、非零奇异值的倒数以及补零操作得到的。
广义逆矩阵的定义
伪逆矩阵的实际意义
伪逆矩阵的意义与线性系统中的应用
1. 线性方程组的解的基本情况
讨论伪逆矩阵需以线性方程组的解为切入点。对于 nnn 元线性方程组 AX=BAX = BAX=B(其中系数矩阵 AAA 为 m×nm \times nm×n 矩阵,常数项向量 BBB 为 m×1m \times 1m×1 向量),其解存在三种典型情况:唯一解、无穷多解、无解。
由于唯一解的求解无需依赖伪逆矩阵的特殊性质,因此本节重点分析后两种情况中伪逆矩阵的作用。
2. 线性方程组有无穷多解时的伪逆应用
当线性方程组存在无穷多解时,需满足秩的条件:R(A)=R([AB])<nR(A) = R([A \ B]) < nR(A)=R([A B])<n(其中 R(⋅)R(\cdot)R(⋅) 表示矩阵的秩,[AB][A \ B][A B] 为方程组的增广矩阵)。该条件通常对应 AAA 为行满秩矩阵,且方程个数(mmm)小于变量个数(nnn)的场景。
尽管此时解的数量无穷,但在所有满足 AX=BAX = BAX=B 的解中,存在一个唯一的“最小范数解”——即距离坐标原点欧几里得距离最近的解,记为 X0X^0X0。
- 最小范数解的构造:X0=A†BX^0 = A^{\dagger}BX0=A†B,其中 A†A^{\dagger}A† 表示矩阵 AAA 的伪逆,且此时 A†A^{\dagger}A† 等价于 AAA 的右逆矩阵。
- 性质:可证明 X0=A†BX^0 = A^{\dagger}BX0=A†B 是所有满足 AX=BAX = BAX=B 的解中,欧几里得范数 ∥X∥\|X\|∥X∥ 最小的解。
3. 线性方程组无解时的伪逆应用
当线性方程组无解时,秩的条件为 R(A)≠R([AB])R(A) \neq R([A \ B])R(A)=R([A B])。该情况的本质是:常数项向量 BBB 不在系数矩阵 AAA 的列空间中,因此不存在能严格满足 AX=BAX = BAX=B 的解。
此时需寻求“近似解”——即找到一个向量 X0X^0X0,使得残差的欧几里得范数 ∥AX−B∥\|AX - B\|∥AX−B∥ 最小化(该解称为最小二乘解)。此时 AX0=B′AX^0 = B'AX0=B′,其中 B′B'B′ 是 AAA 的列空间中与 BBB 欧几里得距离最近的向量。
- 最小二乘解的构造:X0=A†BX^0 = A^{\dagger}BX0=A†B,其中 A†A^{\dagger}A† 仍为 AAA 的伪逆,且此时 A†A^{\dagger}A† 等价于 AAA 的左逆矩阵。
- 性质:该解满足 ∥AX−B∥≥∥AX0−B∥\|AX - B\| \geq \|AX^0 - B\|∥AX−B∥≥∥AX0−B∥(对所有 XXX 成立),但需注意 X0X^0X0 并非传统意义上的解,因为它不直接满足 AX=BAX = BAX=B。
4. 伪逆矩阵的价值总结
从上述两种场景可提炼伪逆矩阵的意义:
- 欧几里得范数的作用:在伪逆求解过程中,欧几里得范数同时承担“度量残差误差”(无解场景)和“限制解的长度”(无穷多解场景)的角色。
- 最优解特性:伪逆矩阵 A†A^{\dagger}A† 所构造的解 X0=A†BX^0 = A^{\dagger}BX0=A†B,是在特定几何约束(最小范数或最小二乘)下的唯一最优解。
- 实际应用:该特性使伪逆矩阵在工程与科学领域广泛应用,例如在最小能量系统设计中,可通过伪逆矩阵直接求得问题的最优方案。
伪逆矩阵与奇异值分解 (SVD) 的关系
非方阵不具有逆矩阵,但它们具有广义逆矩阵或伪逆矩阵。
对于一个矩阵 AAA,如果存在一个矩阵 BBB 满足以下 Moore-Penrose 条件:
(1)ABA=A(2)BAB=B(3)(AB)T=AB(4)(BA)T=BA\begin{align*} (1) & \ ABA = A \\ (2) & \ BAB = B \\ (3) & \ (AB)^T = AB \\ (4) & \ (BA)^T = BA \end{align*}(1)(2)(3)(4) ABA=A BAB=B (AB)T=AB (BA)T=BA
则称 BBB 为 AAA 的广义逆矩阵(或 Moore-Penrose 伪逆)。
满足上述四个条件的广义逆矩阵是唯一的。假设矩阵 AAA 具有奇异值分解 (SVD) 形式:
A=U(Σ000)VT,A = U \begin{pmatrix} \Sigma & 0 \\ 0 & 0 \end{pmatrix} V^T,A=U(Σ000)VT,
其中 UUU 和 VVV 是正交矩阵,Σ\SigmaΣ 是由 AAA 的非零奇异值构成的对角矩阵。则 AAA 的广义逆矩阵 A+A^+A+ 可以表示为:
A+=V(Σ−1000)UTA^+ = V \begin{pmatrix} \Sigma^{-1} & 0 \\ 0 & 0 \end{pmatrix} U^TA+=V(Σ−1000)UT
via:
- 伪逆矩阵(pseudo-inverse)_pseudo-inversion of matrix-CSDN博客
https://blog.csdn.net/u014260892/article/details/38581175 - 伪逆矩阵-CSDN博客
https://blog.csdn.net/xingozd/article/details/49901967 - 矩阵逆与伪逆详解-CSDN博客
https://blog.csdn.net/caomin1hao/article/details/81131382 - 伪逆矩阵(广义逆矩阵) - 简书
https://www.jianshu.com/p/609fa0cce409 - (o゚v゚)ノ Hi - 线性代数 | 伪逆矩阵
https://www.cnblogs.com/isumi/articles/18893136 - 线性代数之伪逆矩阵(pseudoinverse matrix)
https://wyman1024.github.io/linear-algebra-16/