【机器学习】k近邻法
目录
一、引言
二、k 近邻算法
算法 1:k 近邻法
三、k 近邻模型
(一)模型
(二)距离度量
(三)k值的选择
(四)分类决策规则
四、k 近邻法的实现:kd 树
(一)构造 kd 树
算法2:构造平衡 kd 树
(二)搜索 kd 树
算法3:用 kd 树的最近邻搜索
例题:二维空间 kd 树构造
五、总结
一、引言
k 近邻法(k-nearest neighbor,k-NN)是一种基本分类与回归方法。k 近邻法的输入为实例的特征向量,对应于特征空间的点;输出为实例的类别,可多类。k 近邻法假设给定训练数据集,其中实例类别已定。分类时,对新实例,根据其k个最近邻的训练实例类别,通过多数表决等方式预测。故 k 近邻法无显式学习过程,实际利用训练数据集划分特征向量空间并作为分类 “模型”。k值选择、距离度量及分类决策规则是其三个基本要素,该方法于 1968 年由 Cover 和 Hart 提出。本文先叙述 k 近邻算法,再讨论其模型及三个基本要素,最后讲述实现方法 ——kd 树,介绍构造和搜索 kd 树的算法,并用Python代码完整实现。
二、k 近邻算法
k 近邻算法简单直观:给定训练数据集,对新输入实例,在训练数据集中找与其最邻近的k个实例,若这k个实例多数属于某类,就将该输入实例归为该类。
算法 1:k 近邻法
输入:训练数据集

其中, 为实例的特征向量,
为实例的特征向量, 为实例的类别,i=1,2,…,N;实例特征向量x。输出:实例x所属的类y。
为实例的类别,i=1,2,…,N;实例特征向量x。输出:实例x所属的类y。
(1) 据给定距离度量,在训练集T中找出与x最邻近的k个点,涵盖这k个点的x的邻域记作;
(2) 在中据分类决策规则(如多数表决)决定x的类别y:

其中,I为指示函数,时I为 1,否则为 0。
k 近邻法的模型对应特征空间的划分,由距离度量、k值选择和分类决策规则三个基本要素决定。
三、k 近邻模型
(一)模型
k 近邻法中,训练集、距离度量、k值及分类决策规则确定后,新输入实例的类别唯一确定。这相当于将特征空间划分为若干子空间,子空间内每个点的类别确定。特征空间中,每个训练实例点的邻近区域(单元)内的点类别为
,所有训练实例点的单元构成特征空间的划分。
(二)距离度量
特征空间中两实例点的距离反映其相似程度。k 近邻模型的特征空间常为n维实数向量空间![]() ,常用欧氏距离,也可用更一般的
,常用欧氏距离,也可用更一般的距离或 Minkowski 距离。
设 ,则
,则距离定义为:

- 当p=2时,为欧氏距离:
- 当p=1时,为曼哈顿距离:

- 当p=∞时,为各坐标距离的最大值:

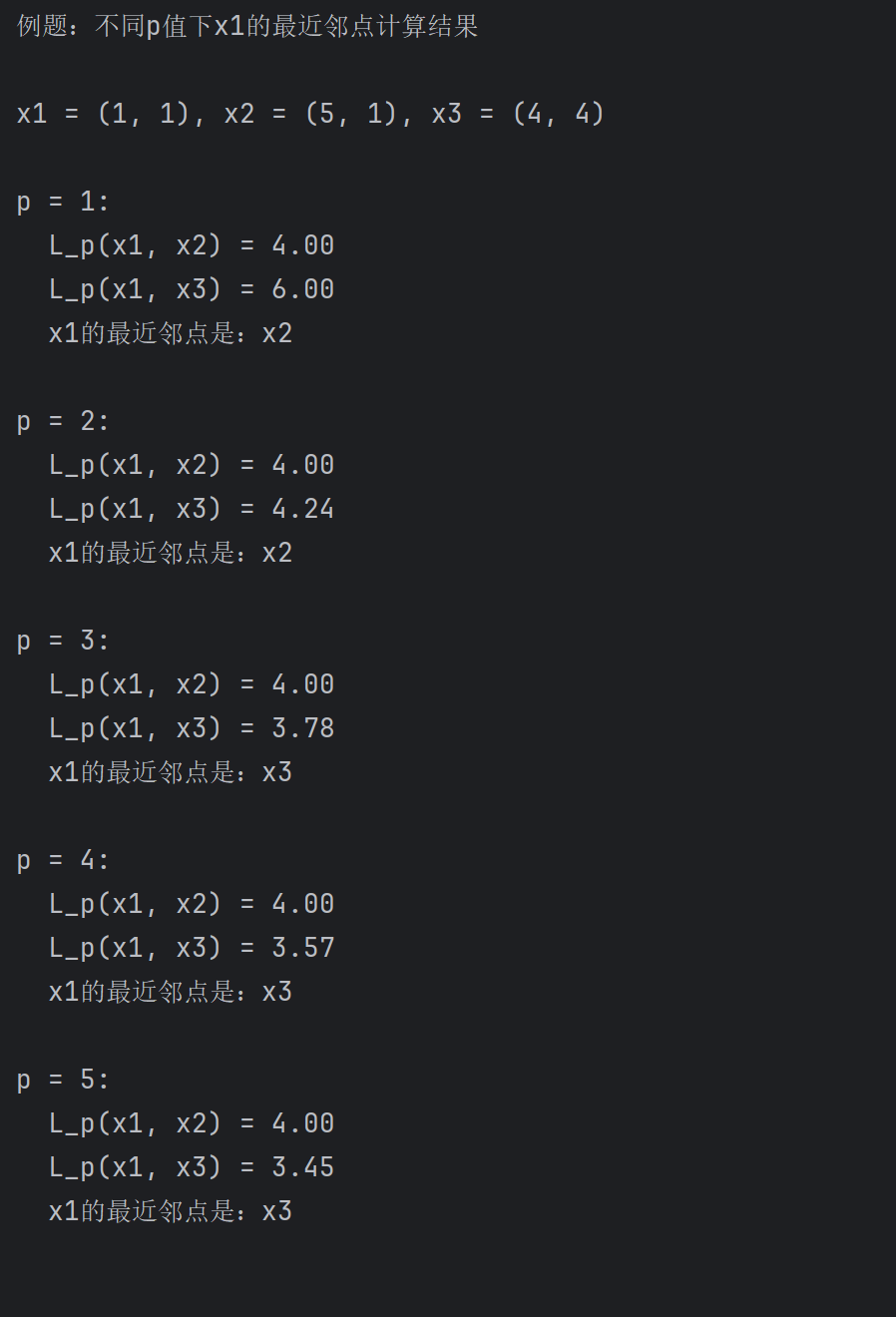
例题:已知二维空间的 3 个点 x₁=(1,1)ᵀ,x₂=(5,1)ᵀ,x₃=(4,4)ᵀ,试求在 p 取不同值时,L_p 距离下 x₁的最近邻点。
解:因为 x₁和 x₂只有第一维的值不同,所以 p 为任何值时,L_p (x₁,x₂)=4。而 L₁(x₁,x₃)=6,L₂(x₁,x₃)=4.24,L₃(x₁,x₃)=3.78,L₄(x₁,x₃)=3.57于是得到:p 等于 1 或 2 时,x₂是 x₁的最近邻点;p 大于等于 3 时,x₃是 x₁的最近邻点。
Python代码完整实现:
import mathdef lp_distance(x, y, p):"""计算两个二维点x和y之间的L_p距离参数:x: 第一个点的坐标,元组或列表 (x1, x2)y: 第二个点的坐标,元组或列表 (y1, y2)p: 距离度量参数 (p≥1)返回:两点间的L_p距离"""# 计算各维度差的绝对值的p次方之和sum_p = (abs(x[0] - y[0]) ** p) + (abs(x[1] - y[1]) ** p)# 开p次方根return sum_p ** (1 / p)if __name__ == "__main__":# 定义题目中的三个点x1 = (1, 1)x2 = (5, 1)x3 = (4, 4)# 测试不同p值(包含题目中的p=1,2,3,4及额外p=5验证结论)p_values = [1, 2, 3, 4, 5]print("例题:不同p值下x1的最近邻点计算结果\n")print(f"x1 = {x1}, x2 = {x2}, x3 = {x3}\n")for p in p_values:# 计算x1到x2和x1到x3的L_p距离d_x1x2 = lp_distance(x1, x2, p)d_x1x3 = lp_distance(x1, x3, p)# 判断最近邻点if d_x1x2 < d_x1x3:nearest = "x2"else:nearest = "x3"# 格式化输出(保留2位小数)print(f"p = {p}:")print(f" L_p(x1, x2) = {d_x1x2:.2f}")print(f" L_p(x1, x3) = {d_x1x3:.2f}")print(f" x1的最近邻点是:{nearest}\n")
程序运行截图展示:
(三)k值的选择
k值选择对 k 近邻法结果影响重大。
- 选较小k值:用较小邻域的训练实例预测,近似误差减小,但估计误差增大,模型复杂,易过拟合。
- 选较大k值:用较大邻域的训练实例预测,估计误差减小,但近似误差增大,模型简单。
- 若k=N:预测为训练实例中最多的类,模型过简,忽略大量有用信息,不可取。
应用中k值一般取较小值,常用交叉验证法选最优k值。
(四)分类决策规则
k 近邻法的分类决策规则常为多数表决,即由输入实例的k个邻近训练实例的多数类决定输入实例的类。
多数表决规则可解释为:若分类损失函数为 0-1 损失函数,分类函数f: ,则误分类概率为
,则误分类概率为 。对实例x,其最近邻的k个训练实例点构成
。对实例x,其最近邻的k个训练实例点构成,若
区域类别为
,则误分类率为:

要使误分类率最小(经验风险最小),需使 最大,故多数表决规则等价于经验风险最小化。
最大,故多数表决规则等价于经验风险最小化。
四、k 近邻法的实现:kd 树
实现 k 近邻法时,需解决训练数据的快速 k 近邻搜索问题,尤其在特征空间维数大、训练数据容量大时。
k 近邻法最简单的实现是线性扫描,即计算输入实例与每个训练实例的距离。但训练集大时计算耗时,不可行。
为提高搜索效率,可采用特殊结构存储训练数据以减少距离计算次数。
Python代码初始化kd树:
class Node:def __init__(self, axis=None, value=None, left=None, right=None, point=None):self.axis = axis # 分割维度self.value = value # 分割值self.left = left # 左子节点self.right = right # 右子节点self.point = point # 叶节点对应的实际点(一)构造 kd 树
kd 树是一种对 k 维空间中的实例点进行存储以便对其进行快速检索的树形数据结构。kd 树是二叉树,表示对 k 维空间的一个划分(partition)。构造 kd 树相当于不断地用垂直于坐标轴的超平面将 k 维空间切分,构成一系列的 k 维超矩形区域。kd 树的每个结点对应于一个 k 维超矩形区域。
构造 kd 树的方法如下:构造根结点,使根结点对应于 k 维空间中包含所有实例点的超矩形区域;通过下面的递归方法,不断地对 k 维空间进行切分,生成子结点。在超矩形区域(结点)上选择一个坐标轴和在此坐标轴上的一个切分点,确定一个超平面,这个超平面通过选定的切分点并垂直于选定的坐标轴,将当前超矩形区域切分为左右两个子区域(子结点);这时,实例被分到两个子区域。这个过程直到子区域内没有实例时终止(终止时的结点为叶结点)。在此过程中,将实例保存在相应的结点上。
通常,依次选择坐标轴对空间切分,选择训练实例点在选定坐标轴上的 ** 中位数(median)** 为切分点,这样得到的 kd 树是平衡的。注意,平衡的 kd 树搜索时的效率未必是最优的。
算法2:构造平衡 kd 树
输入:k维空间数据集  ,其中
,其中  ,i=1,2,…,N;输出:kd 树。
,i=1,2,…,N;输出:kd 树。
-
构造根结点:根结点对应包含T的k维空间超矩形区域。选择
为坐标轴,以T中所有实例的
-
递归切分:对深度为j的结点,选择
为切分坐标轴(l=jmodk+1),以该结点区域内所有实例的
-
终止条件:直到两个子区域无实例存在时停止,形成 kd 树的区域划分。
Python代码构造kd树:
def build_kd_tree(points, depth=0):"""递归构造kd树"""if not points:return Nonek = len(points[0]) # 特征维度axis = depth % k # 轮流选择分割维度# 按当前维度排序points_sorted = sorted(points, key=lambda x: x[axis])median_idx = len(points_sorted) // 2 # 取中位数索引median_point = points_sorted[median_idx]# 递归构造左右子树left = build_kd_tree(points_sorted[:median_idx], depth + 1)right = build_kd_tree(points_sorted[median_idx+1:], depth + 1)return Node(axis=axis, value=median_point[axis], left=left, right=right, point=median_point)
(二)搜索 kd 树
利用 kd 树进行 k 近邻搜索时,以最近邻为例:
- 定位叶结点:从根结点出发,递归向下访问 kd 树,直到找到包含目标点的叶结点,以此叶结点的实例点作为当前最近点。
- 回退父结点:目标点的最近邻一定在以目标点为中心、以 “当前最近点” 距离为半径的超球体内。回退到父结点,检查父结点的另一子结点的超矩形区域是否与超球体相交:
- 若相交,在该子区域内递归搜索更近的点,更新 “当前最近点”;
- 若不相交,继续回退,直到根结点,最终 “当前最近点” 即为目标点的最近邻。
算法3:用 kd 树的最近邻搜索
输入:已构造的 kd 树,目标点x;输出:x的最近邻。
- 定位叶结点:从根结点出发,递归向下访问 kd 树。若目标点x当前维的坐标小于切分点坐标,移动到左子结点,否则移动到右子结点,直到子结点为叶结点。
- 初始化当前最近点:以该叶结点为 “当前最近点”。
- 递归回退父结点:
- 若该结点实例点比 “当前最近点” 更近,更新 “当前最近点”;
- 检查父结点的另一子结点对应的区域是否与以目标点为球心、以 “当前最近点” 距离为半径的超球体相交:
- 若相交,移动到该子结点,递归搜索最近邻;
- 若不相交,向上回退。
- 终止条件:回退到根结点时,搜索结束,最终 “当前最近点” 即为x的最近邻。
Python代码搜索kd树:
def distance(a, b):"""计算欧氏距离"""return math.sqrt(sum((ai - bi)** 2 for ai, bi in zip(a, b)))def find_nearest_neighbor(root, point, depth=0, best=None, best_dist=float('inf')):"""递归搜索最近邻"""if root is None:return best, best_distk = len(point)axis = root.axis# 向下遍历到叶节点if point[axis] < root.value:next_node = root.leftother_node = root.rightelse:next_node = root.rightother_node = root.leftbest, best_dist = find_nearest_neighbor(next_node, point, depth + 1, best, best_dist)# 检查当前节点dist = distance(root.point, point)if dist < best_dist:best = root.pointbest_dist = dist# 检查另一子树(超球体与超矩形相交时)if abs(point[axis] - root.value) < best_dist:best, best_dist = find_nearest_neighbor(other_node, point, depth + 1, best, best_dist)return best, best_dist
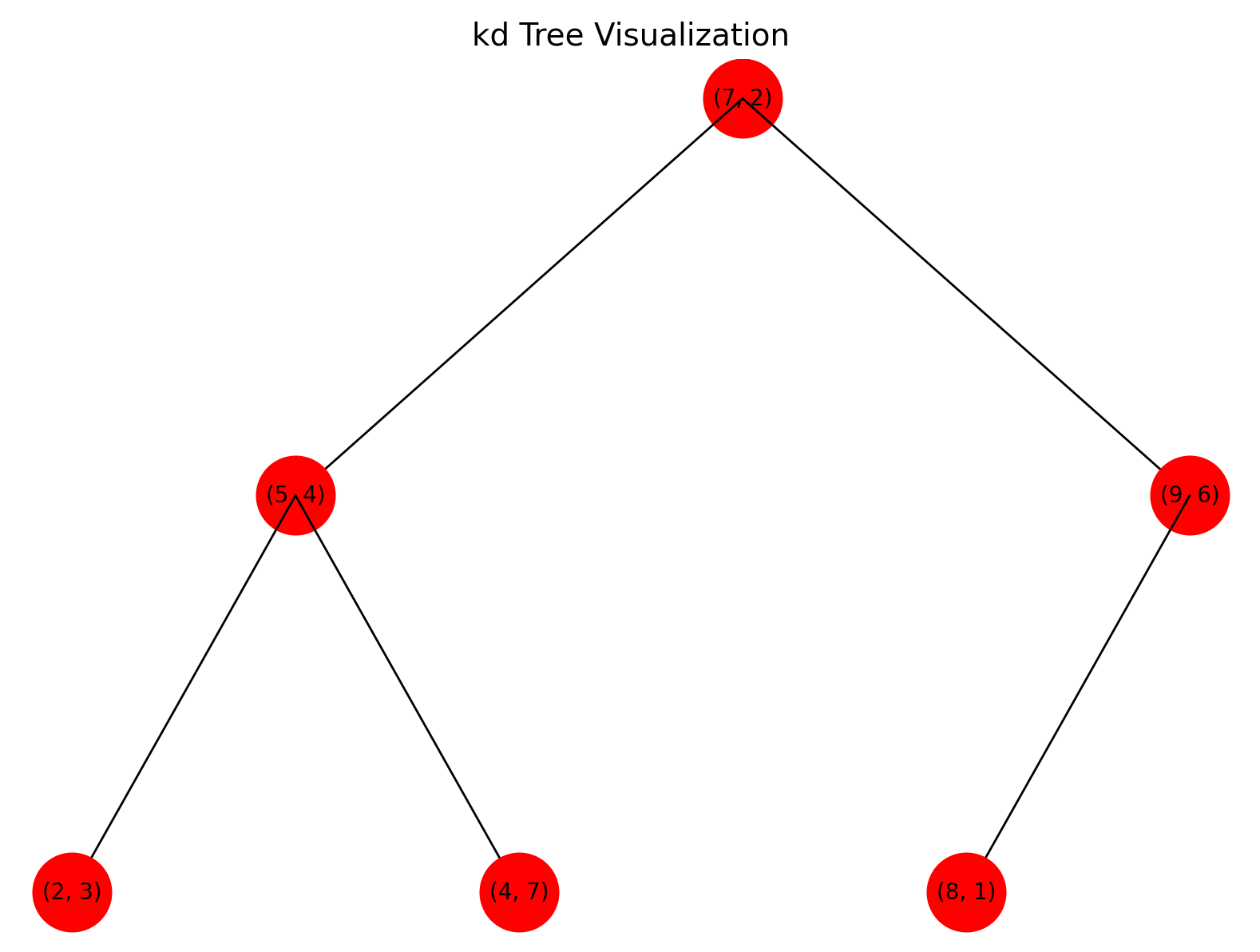
例题:二维空间 kd 树构造
给定数据集  :
:
- 选择
- 左矩形以
=4切分,右矩形以
- 递归操作后,得到特征空间划分和 kd 树(根结点(7,2),左子结点(5,4),右子结点(9,6);(5,4)的左子结点(2,3)、右子结点(4,7);(9,6)的子结点(8,1))。
求点的最近邻点。
Python完整代码如下:
import matplotlib.pyplot as plt
import mathclass Node:def __init__(self, axis=None, value=None, left=None, right=None, point=None):self.axis = axis # 分割维度self.value = value # 分割值self.left = left # 左子节点self.right = right # 右子节点self.point = point # 叶节点对应的实际点def build_kd_tree(points, depth=0):"""递归构造kd树"""if not points:return Nonek = len(points[0]) # 特征维度axis = depth % k # 轮流选择分割维度# 按当前维度排序points_sorted = sorted(points, key=lambda x: x[axis])median_idx = len(points_sorted) // 2 # 取中位数索引median_point = points_sorted[median_idx]# 递归构造左右子树left = build_kd_tree(points_sorted[:median_idx], depth + 1)right = build_kd_tree(points_sorted[median_idx+1:], depth + 1)return Node(axis=axis, value=median_point[axis], left=left, right=right, point=median_point)def distance(a, b):"""计算欧氏距离"""return math.sqrt(sum((ai - bi)** 2 for ai, bi in zip(a, b)))def find_nearest_neighbor(root, point, depth=0, best=None, best_dist=float('inf')):"""递归搜索最近邻"""if root is None:return best, best_distk = len(point)axis = root.axis# 向下遍历到叶节点if point[axis] < root.value:next_node = root.leftother_node = root.rightelse:next_node = root.rightother_node = root.leftbest, best_dist = find_nearest_neighbor(next_node, point, depth + 1, best, best_dist)# 检查当前节点dist = distance(root.point, point)if dist < best_dist:best = root.pointbest_dist = dist# 检查另一子树(超球体与超矩形相交时)if abs(point[axis] - root.value) < best_dist:best, best_dist = find_nearest_neighbor(other_node, point, depth + 1, best, best_dist)return best, best_distdef plot_kd_tree(node, x=0.5, y=1, depth=0, parent_x=None, parent_y=None, ax=None):"""递归绘制kd树结构"""if ax is None:ax = plt.gca()if node is None:return# 绘制当前节点与父节点的连线if parent_x is not None and parent_y is not None:ax.plot([parent_x, x], [parent_y, y], 'k-', linewidth=1)# 绘制节点(红色圆点)ax.plot(x, y, 'ro', markersize=35)# 标注节点坐标ax.text(x, y, str(node.point), ha='center', va='center', fontsize=10)# 递归处理左右子树,调整x坐标以避免重叠k = len(node.point)axis = node.axisleft_x = x - 0.2 / (2 ** depth)right_x = x + 0.2 / (2 ** depth)plot_kd_tree(node.left, left_x, y - 0.1, depth + 1, x, y, ax)plot_kd_tree(node.right, right_x, y - 0.1, depth + 1, x, y, ax)# ------------------- 测试 -------------------
# 教材例3.2的数据集
points = [(2, 3), (5, 4), (9, 6), (4, 7), (8, 1), (7, 2)]
root = build_kd_tree(points)# 可视化kd树
plt.figure(figsize=(8, 6))
plot_kd_tree(root)
plt.axis('off') # 隐藏坐标轴
plt.title('kd Tree Visualization', fontsize=14)
plt.tight_layout()
plt.show()# 测试最近邻搜索
target = (3, 4.5) # 目标点
nearest, dist = find_nearest_neighbor(root, target)
print(f"目标点 {target} 的最近邻点:{nearest},距离:{round(dist, 2)}")
程序运行截图展示:

五、总结
本文系统介绍了k近邻算法(k-NN)及其实现方法。k-NN是一种基于实例的分类与回归方法,通过计算输入实例与训练数据的距离,选择k个最近邻点进行分类决策。文章详细阐述了k-NN的三要素:距离度量(包括欧氏、曼哈顿等)、k值选择(影响模型复杂度)和分类决策规则(如多数表决)。重点介绍了kd树这一高效实现方式,包括其构造方法(递归划分特征空间)和搜索算法(回溯查找最近邻)。通过Python代码实现了距离计算、kd树构建和最近邻搜索功能,并以二维空间示例验证了算法有效性。最后指出平衡kd树虽能提高搜索效率,但未必最优。