汽车转向控制 / 线控转向介绍——控制技术——智能驾驶专栏
汽车转向控制是通过驾驶员操作转向机构,将转向力矩传递至转向执行机构,最终实现车轮偏转和车辆行驶方向调整的核心系统,保证了车辆转向的精准性、稳定性和轻便性。
1 转向控制系统的核心组成
汽车转向控制系统,属于电动助力转向(EPS)系统的一种进阶架构,融合了传感器、电控单元和执行机构,实现精准的转向控制
1.1 信号采集层
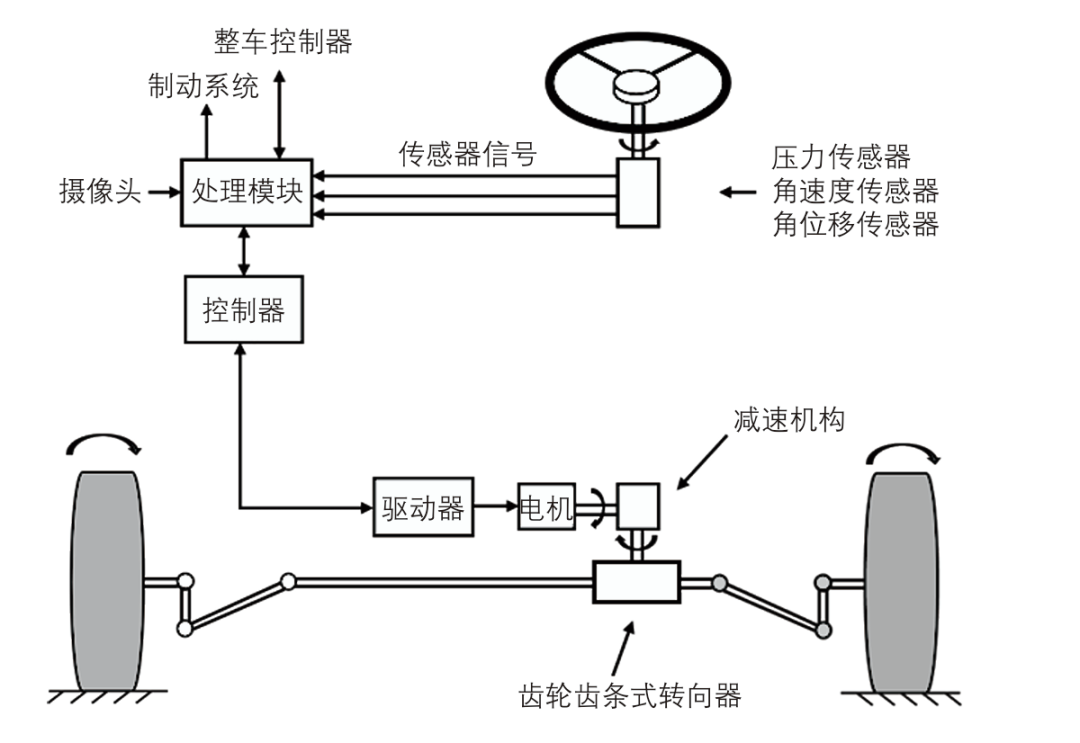
方向盘端传感器:压力传感器:检测驾驶员施加在方向盘上的转向力矩;
角速度传感器:捕捉方向盘转动的速度;
角位移传感器:测量方向盘转动的角度。这些信号共同反映驾驶员的转向意图。
摄像头:属于环境感知设备,可识别道路标线、障碍物等,为智能驾驶(如车道保持辅助)下的转向控制提供环境信息。
1.2 信号处理与决策层
处理模块:接收方向盘传感器信号和摄像头的环境信号,进行初步的数据融合与处理,再将信息传递给整车控制器和控制器。
整车控制器:是车辆的核心控制单元之一,可协调转向系统与制动系统等其他整车系统的工作,实现多系统协同控制(如转向与制动配合的稳定性控制)。
控制器(EPS ECU):根据处理模块的指令,结合车辆状态(如车速,图中未画出车速传感器但属于常规配置),计算出电机所需的助力扭矩和动作指令。
1.3 执行层
驱动器:接收控制器的指令,将电信号转化为可驱动电机的功率信号。
电机:根据驱动器的指令输出助力扭矩,通过减速机构放大扭矩后,驱动齿轮齿条式转向器。
齿轮齿条式转向器:将电机的旋转运动转化为齿条的直线运动,通过横拉杆带动转向节,最终使左右车轮偏转,实现车辆转向。
2 线控转向系统结构及工作原理
智能汽车线控转向系统结构如图所示。其中SBW系统由五个主要模块 组成,用于控制车辆转向的方向盘模块、用于对路感进行实时反馈的路感模拟 电机模块、用于接收来自控制器电流的转向执行电机模块、以及用于实现车轮 横摆运动的齿轮齿条模块和转向轮模块。
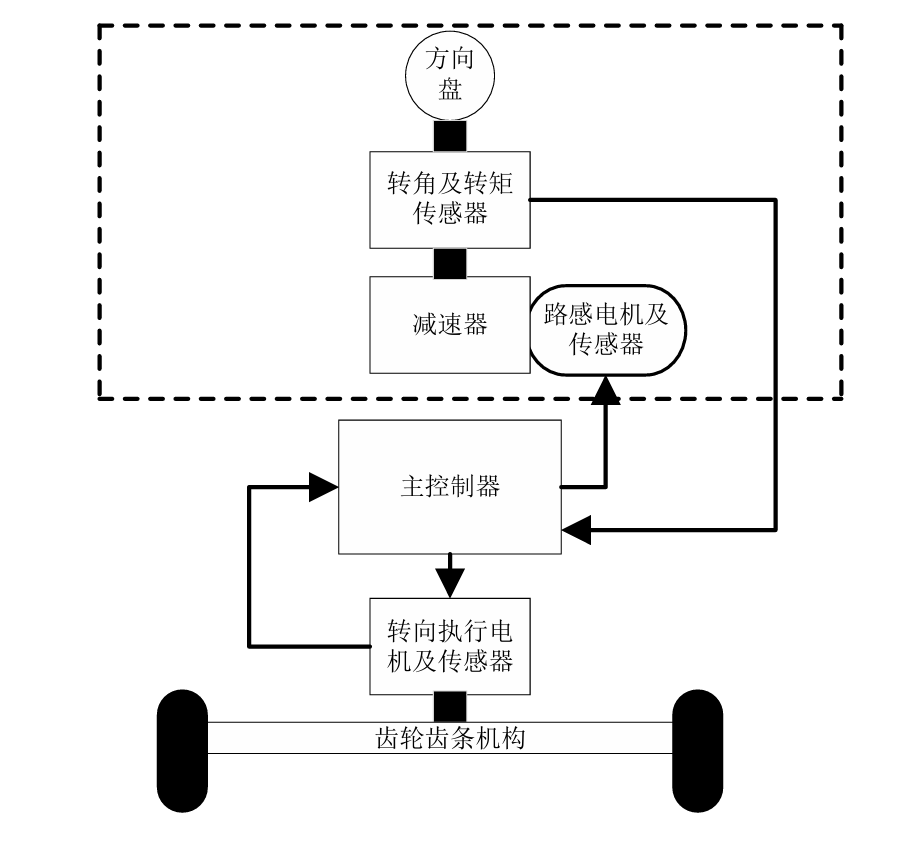
线控转向系统的工作原理和传统转向系统有所不同。汽车转向时,控制器可计算出转向执行电机电流大小,并将电流信号传递给转向执行电机,使转向电机输出合适的扭矩。进而齿轮齿条机构运动,带动前轮扭转,实现车辆的转 向。同时,根据路面情况不同,路感电机模拟出符合行驶状态的力矩,帮助驾驶员感知路面状态信息。
2.1 驾驶员控制模式下的工作原理:
首先转向输入,当驾驶员转动转向盘时,转向盘总成 中的转角传感器和力矩传感器会输出相应信号,同时与整 车相关的如车速、横摆角速度、侧向加速度等信号也同步 通过数据总线传输给SBW系统控制器。
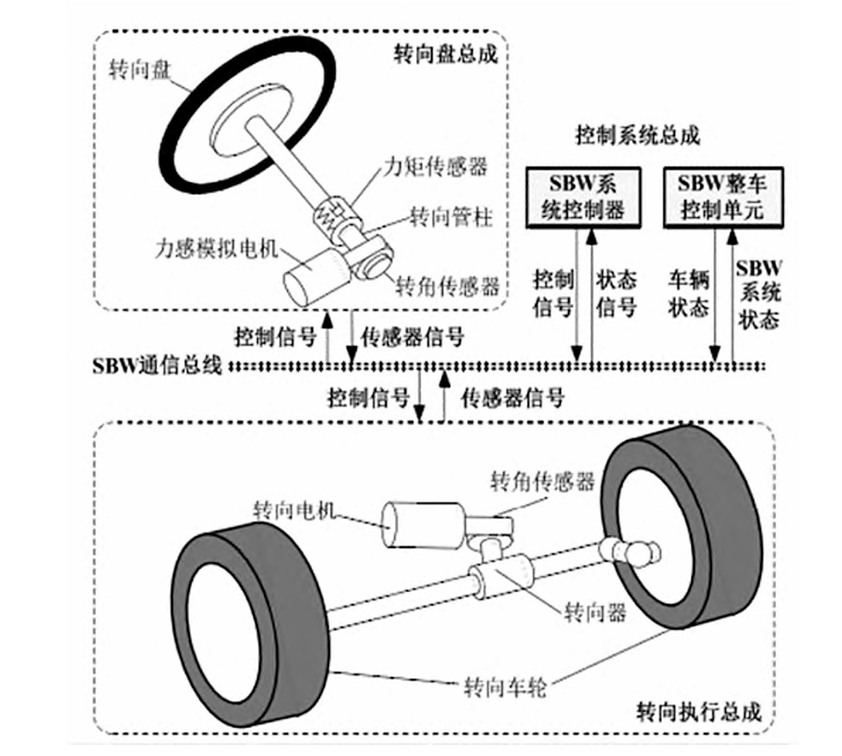
其次转向输出,根据设计好的前轮转角控制算法, SBW控制器得到前轮转角控制信号,其信号最终传递到 转向电机,由转向电机驱动转向器,从而控制转向车轮输 出目标转角。
最后转向反馈,SBW控制器可通过获取转向电机的 助力电流大小,根据设计好的路感反馈算法,确定需要的 转向回正力矩,并将其传递给转向盘总成中的路感电机, 路感电机产生相应的回正力矩,从而使驾驶员获得一定的 路感反馈。
2.2方向盘模型
方向盘模块包含方向盘、转角传感器、转矩传感器、路感电机及传感器。 驾驶员转动方向盘,转角转矩传感器会接受到方向盘转角以及转矩信息,传递 给中央控制器。
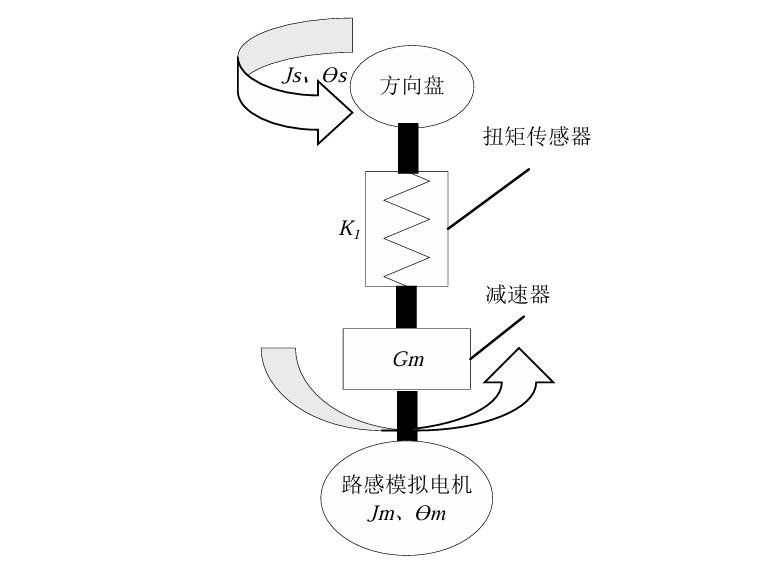
根据受力状态,建立对应的动力学模型,如下:

线控转向系统没有了转向柱的存在,车辆在转向过程中地面的情况不能及 时反馈给驾驶员。因此路感电机的作用是根据路面的实际情况,将路感实时的 反应给驾驶员,从而使驾驶员能够感知道路情况并做出最佳的转向选择。根据 对应的动力学模型,建立路感电机以及减速器的动力学模型:
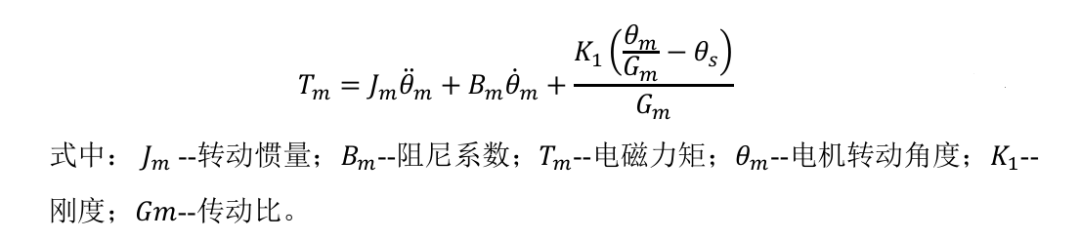
路感电机采用的是直流电机进行控制,根据克希霍夫定律,电机的电势平 衡方程如下所示:

电磁转矩方程为:

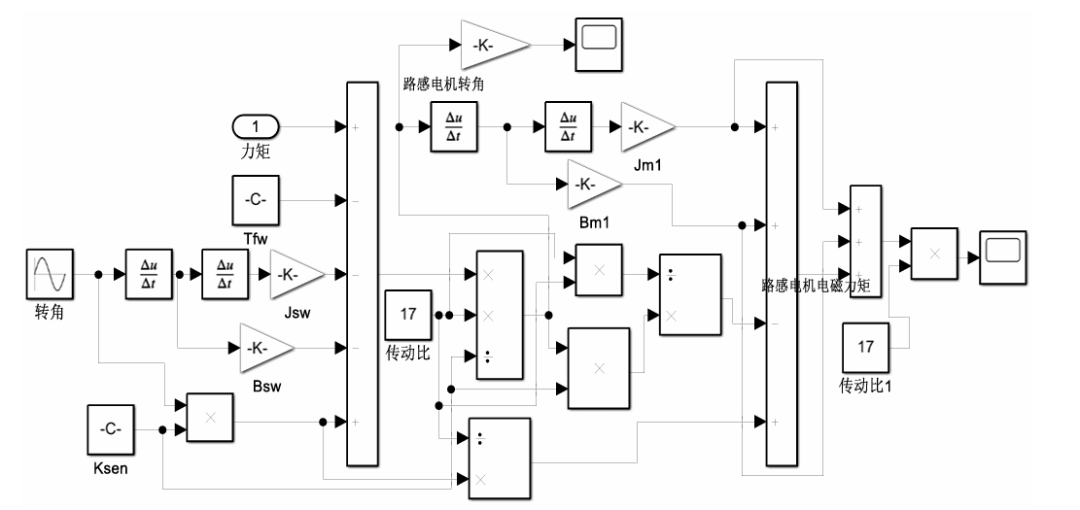
可建立仿真模型如下:
2.3转向执行机构模型
如图所示,转向执行机构是线控转向系统中的核心模块,它控制着前轮 的转向。转向执行机构由转向执行电机、前轮转角模块组件、前轮转角传感器、 齿轮齿条机构等部分组成
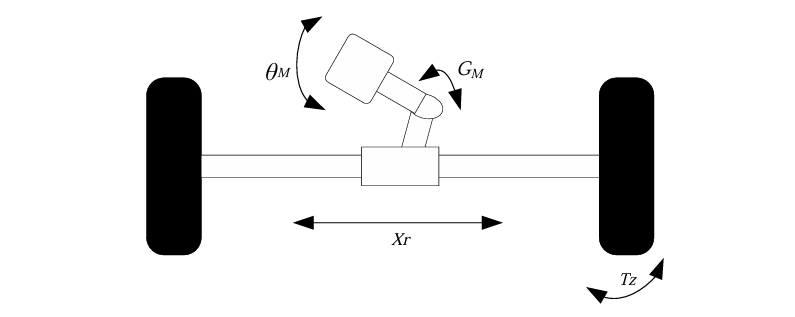
方向盘模块将数据输出给中央控制器,控制器将数据转换成电信号的形式 传递给转向执行电机,转向执行电机运转驱动齿轮齿条机构,进而带动车轮进行转向操作。
根据动力学平衡方程,可得转向执行电机部分的微分方程:
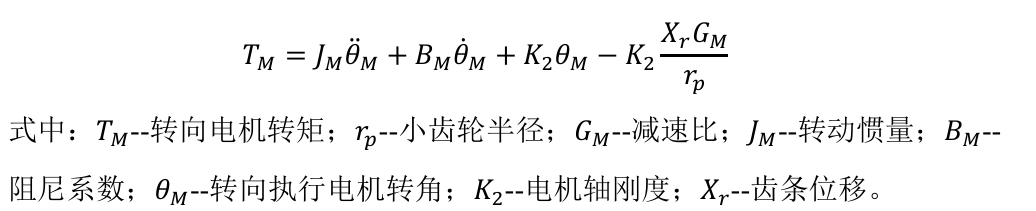
齿轮齿条通过转向电机的带动进而工作,将电机的旋转运动转换为齿条的 横向运动,进而带动车轮进行转向。根据动力学平衡方程,可得齿轮齿条机构 部分的微分方程:
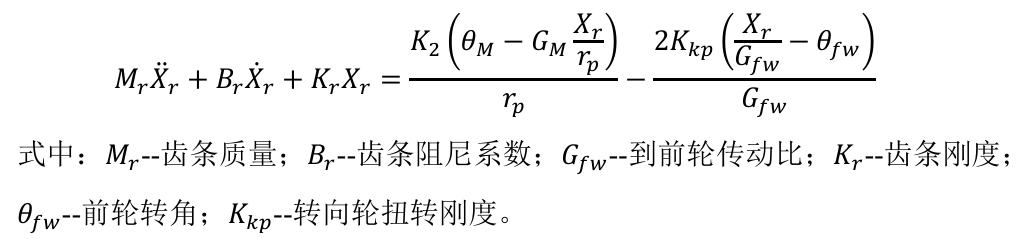
前转向轮是通过齿轮齿条的横向运动来推动转向的。根据动力学平衡方程 可知前转向轮机构的微分方程:
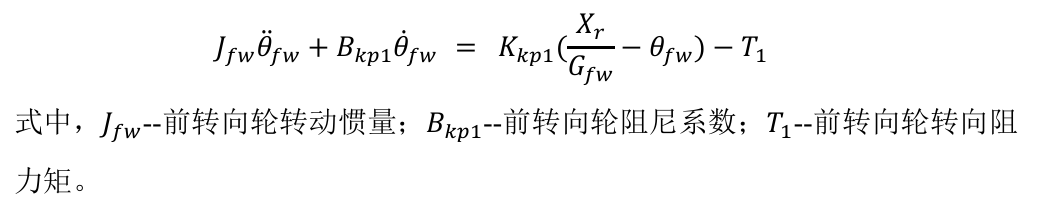
可建立仿真模型如下:
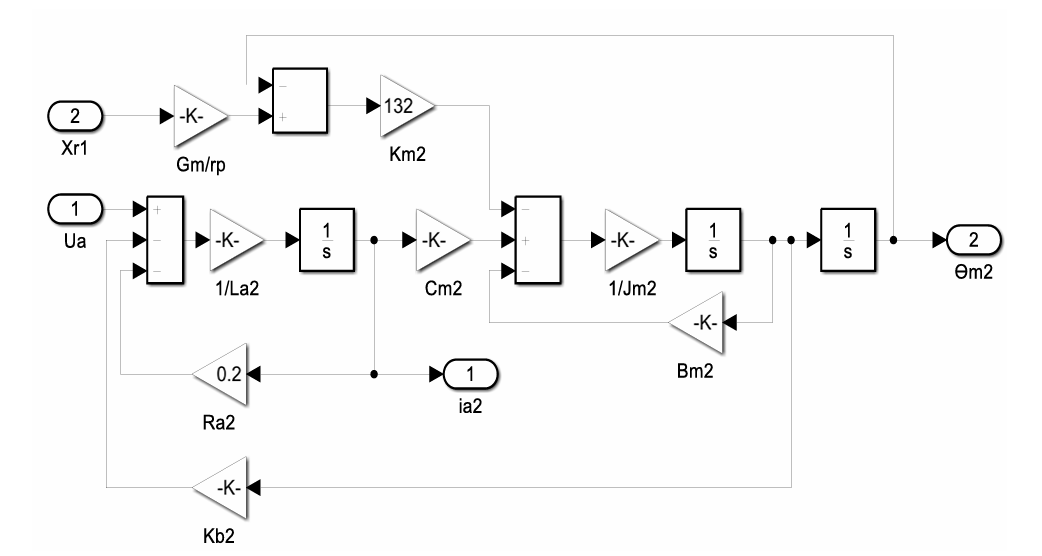
2.4 SBW系统容错控制结构及软硬件容错
硬件容错是通过对重要部件及易发生故障的部件进行 备份,提高系统容错性能,如对电机、传感器、ECU、电源、通 信网络等易发生故障的硬件部分进行备份设计,备份的装置 可以实现与原装置一样的功能,备份的装置可以与原装置同 时工作,也可以一个工作而另一个处于待命状态。
软件容错是依靠控制器的容错算法来提高整个系统的冗余度,从而改 善系统的容错性能,对故障后剩余正常工作的转向系统装置 进行控制,当部分装置故障时,通过实时数据采样,定位故障 类型与位置,进而整合剩余正常工作的装置,互相协同工作, 达到正常工作状态。
3 控制策略
3.1 双闭环模糊PID齿条位移跟踪控制策略
底层控制策略要准确、快速地实现驾驶员的转向意图。本文中的系统的输出变量为齿条位移S,影响齿条位移的主要变量是电机转矩Tm,所以采用双 闭环控制策略进行齿条位移跟踪控制。内环对齿条 速度进行控制,从而控制电机转矩,外环对齿条位 移进行跟踪,以提高控制精度和稳定性,总体控制框图如图所示。
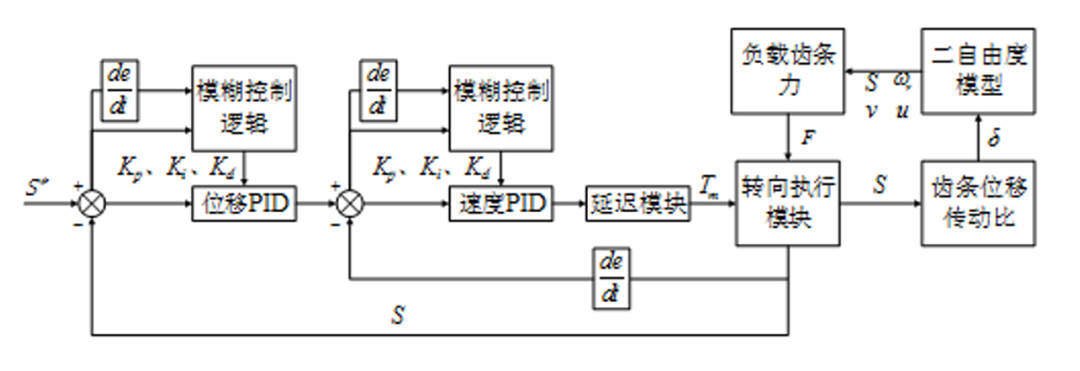
模糊PID控制的核心是模糊逻辑,它通过模糊 规则来映射输入变量到输出的关系,从而实现PID参 数的实时调整。
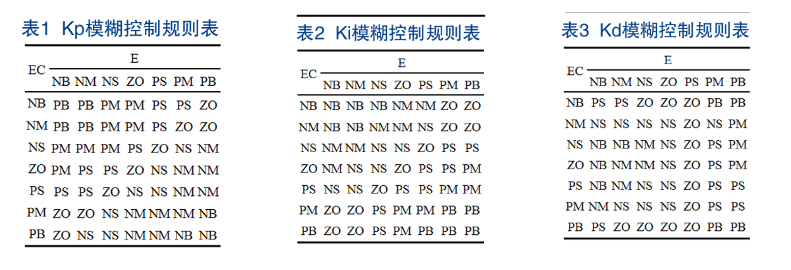
选择PB(正大)、PM(正中)、PS(正小)、 ZO(零)、NB(负大)、NM(负中)、NS(负小)作为语言 变量来构建模糊规则。在PID控制器中,Kp决定了 控制器对当前误差的响应强度,增大Kp会使系统响 应更快,但如果Kp过大,可能导致系统产生较大的 超调和振荡;Ki的目的是消除系统的稳态误差,确 保系统最终能达到目标值,增加Ki会加快消除稳态 误差的速度,但如果Ki过大,可能导致系统不稳定 和振荡。Kd的目的是预测误差的变化趋势,从而对 控制器输出进行修正,减小误差变化的速度。综上 所述,PID参数的模糊规则可归纳为下表
HIL台架仿真:

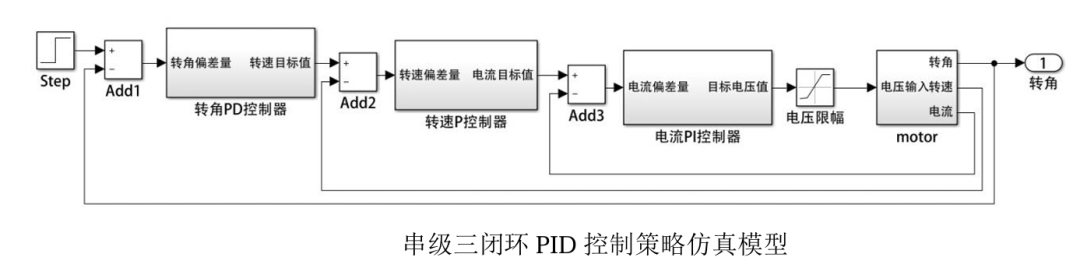
3.2 串级三闭环控制策略
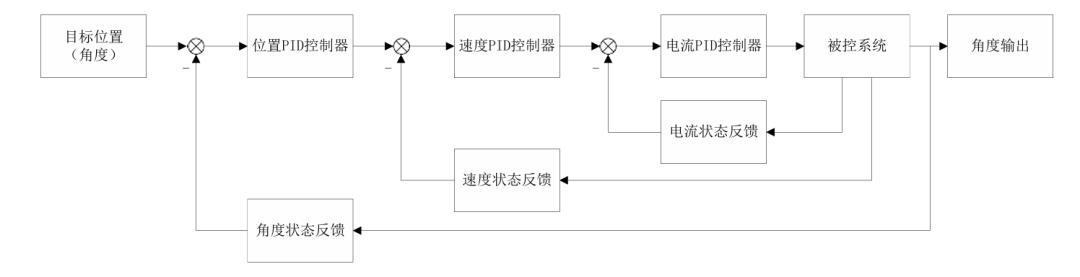
串级三闭环控制系统的设计特点和优势是:
-
将系统主要干扰输入包含到内环回路中,具有超前控制作用,可以有效抑制干扰;
-
外环控制器设计通常以良好的动态性能和鲁棒性作为目标进行‘细调’,内环控 制器通常以系统的稳定性作为设计目标同时尽量改善快速性;
-
串级三闭环控制系统相较于单闭环PID控制系统工作频率更高,振荡周期更小, 调节时间更短,快速性更强。
仿真模型搭建:
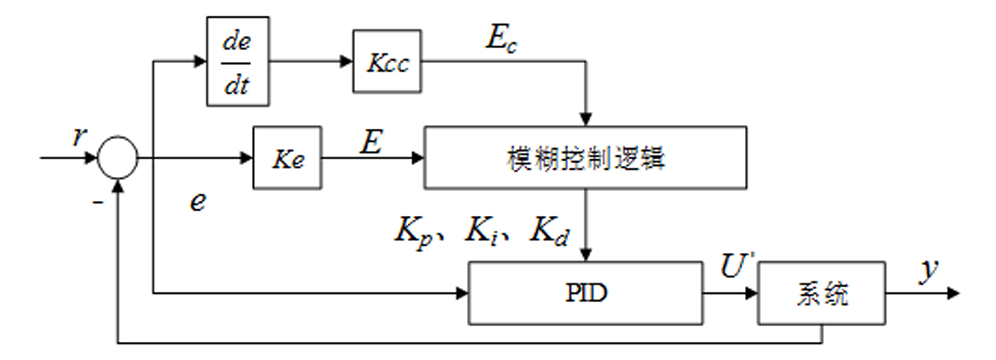
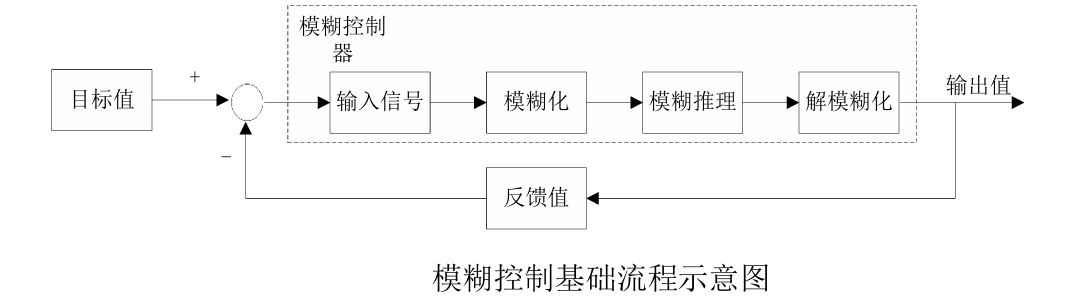
3.3 模糊自适应PID控制策略研
模糊控制以模糊集合论、模糊语言变量和模糊逻辑推理为基础,如图所示, 使用模糊集合论把专家知识和操作人员经验编写成模糊规则表,把输入信号模糊化并 依据规则表完成模糊推理,将推理结果解模糊化作为模糊控制器的输出,具有适用性 强和鲁棒性高的优点
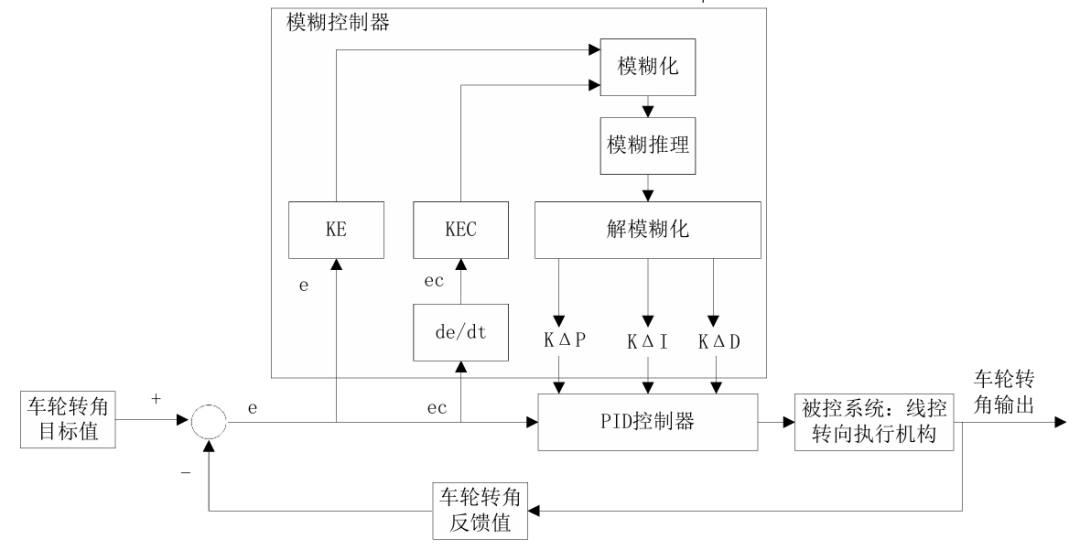
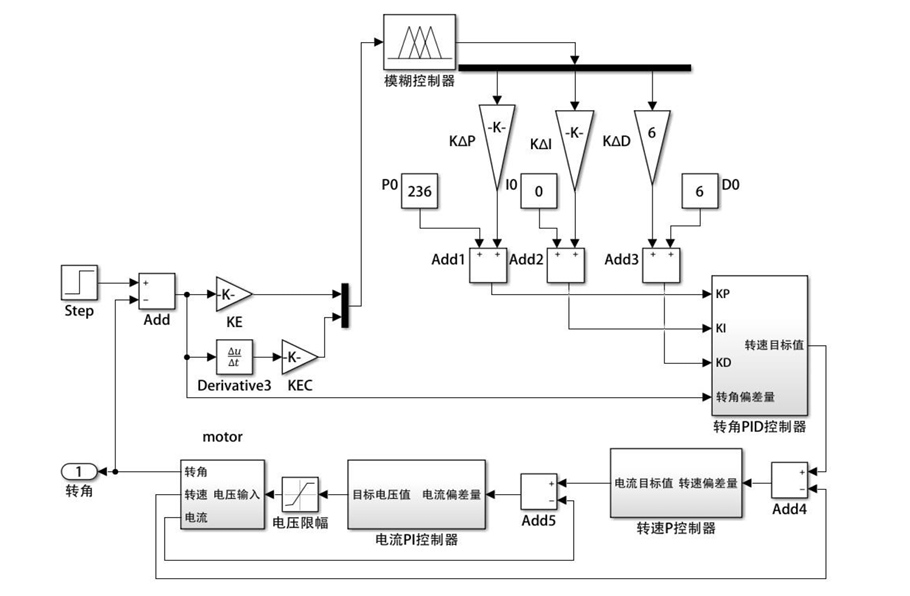
模糊自适应PID控制策略结构示意如图所示
仿真模型搭建:
3.4 基于模型预测的车辆横向控制
3.4.1 模型预测控制原理
模型预测控制是一种求解开环最优控制问题的算法,其原理如图3.1所示。 在任何采样时刻获得被控对象的当前状态,与参考状态进行误差计算,结合性能 指标和系统约束得到最优解,最优解就是下一采样时刻的输出值;通过滚动优化 方式,在每一个采样时刻都进行相同的操作,并且输出值会根据不同采样时刻获 取的状态和信息的不同而进行优化。
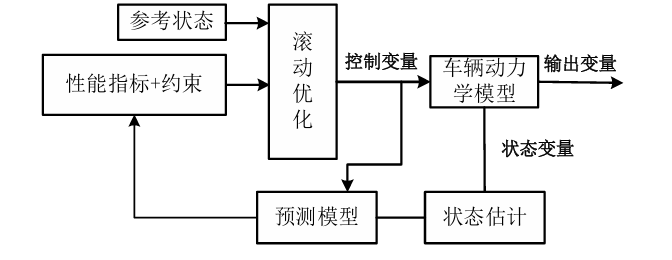
根据模型预测控制的原理,可以将模型预测控制的整体过程拆散成三个组成部分:预测模型、滚动优化、反馈校正。
3.4.2 车辆转向控制器设计
自动驾驶车辆通过车载传感器获得车辆自身状态、道路信息和周围环境等 信息。摄像头能够拍摄车道线并进行灰度化、鸟瞰视角转换等手段,计算出道路 曲率等信息.通常基于模型预测的横向控制以横向速度、横摆角速度为状态量,前轮转角为控制量,而这种控制方式只考虑了车辆的横摆特性而忽略的侧倾 特性,更是无法适应复杂道路;在弯道行驶时,道路的曲率对车辆的稳定性有很的影响,在建立状态空间时,也需要考虑道路曲率的影响。
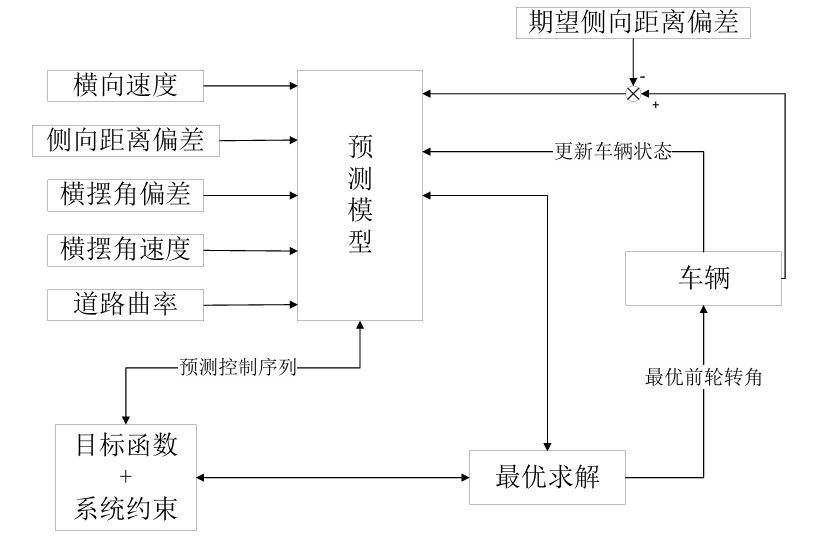
因此,本章提出 一种基于模型预测控制的车辆横向控制策略,根据车载传感器获得的状态信息, 以横向速度、侧向距离偏差、横摆角偏差和横摆角速度为状态量,前轮转角为控 制量,横摆角速度为附加量;通过求解最优前轮转角使车辆保持在车道内行驶。 考虑道路曲率和侧倾特性的车辆横向控制器原理如图所示。
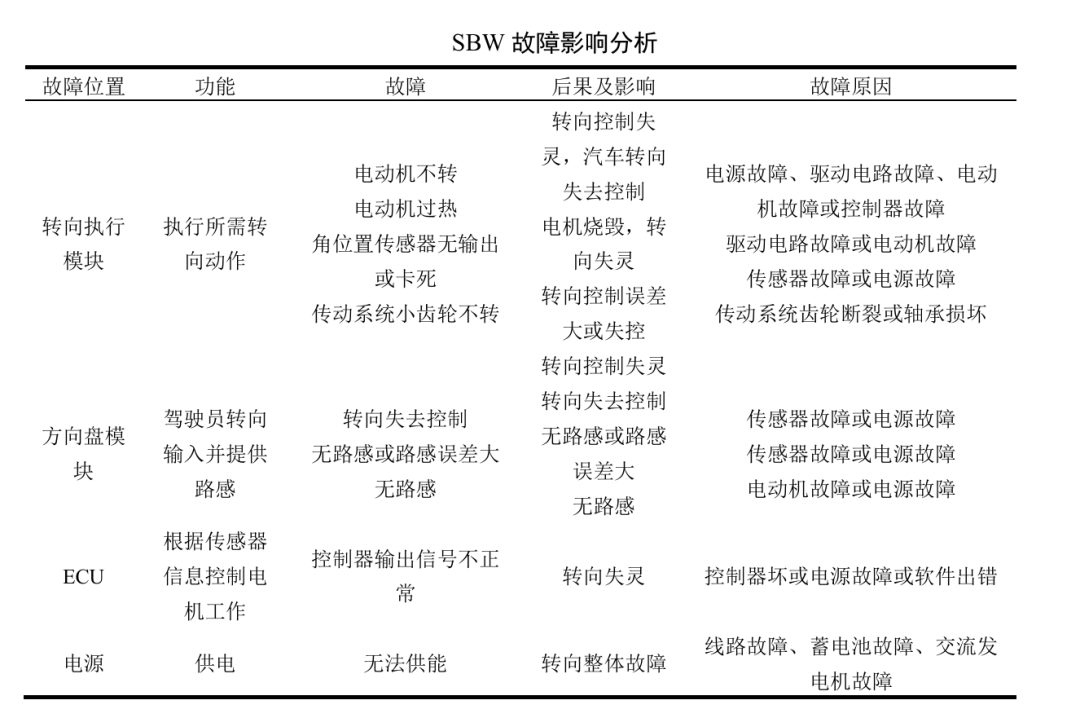
4 线控转向系统故障形式
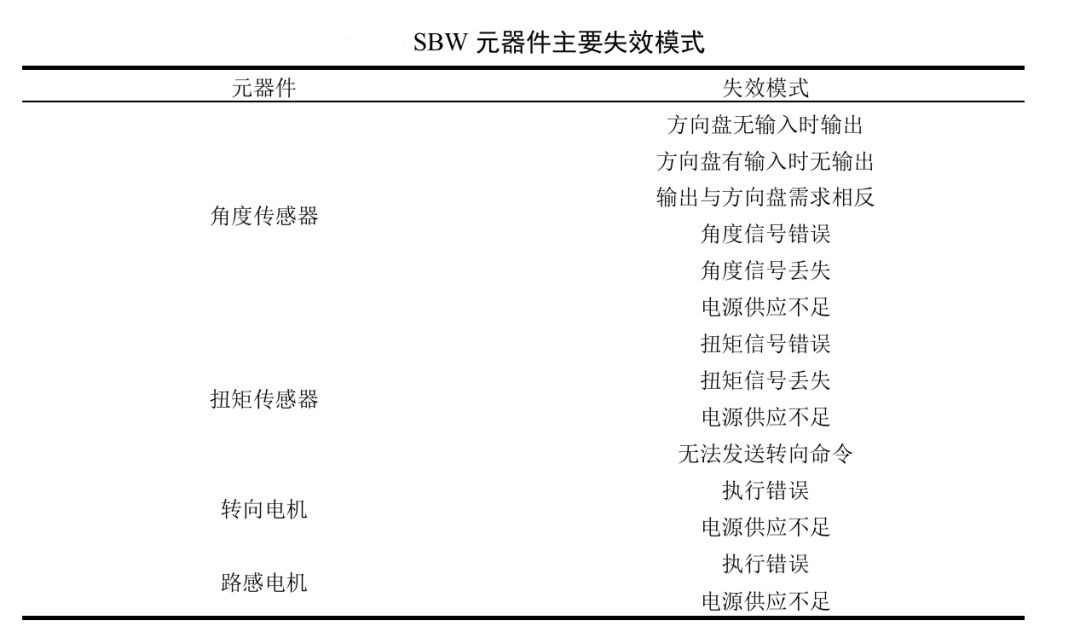
在智能车辆系统中,传感器与执行器是保障车辆安全、稳定运行的核心部件。 本文主要针对传感器和执行器进行故障分析,传感器包括转角传感器、扭矩传感器, 执行器主要为转向电机,同时也将路感电机考虑在内,具体内容见下表。准确把握失效模式能实现快速、精准的故障诊断。
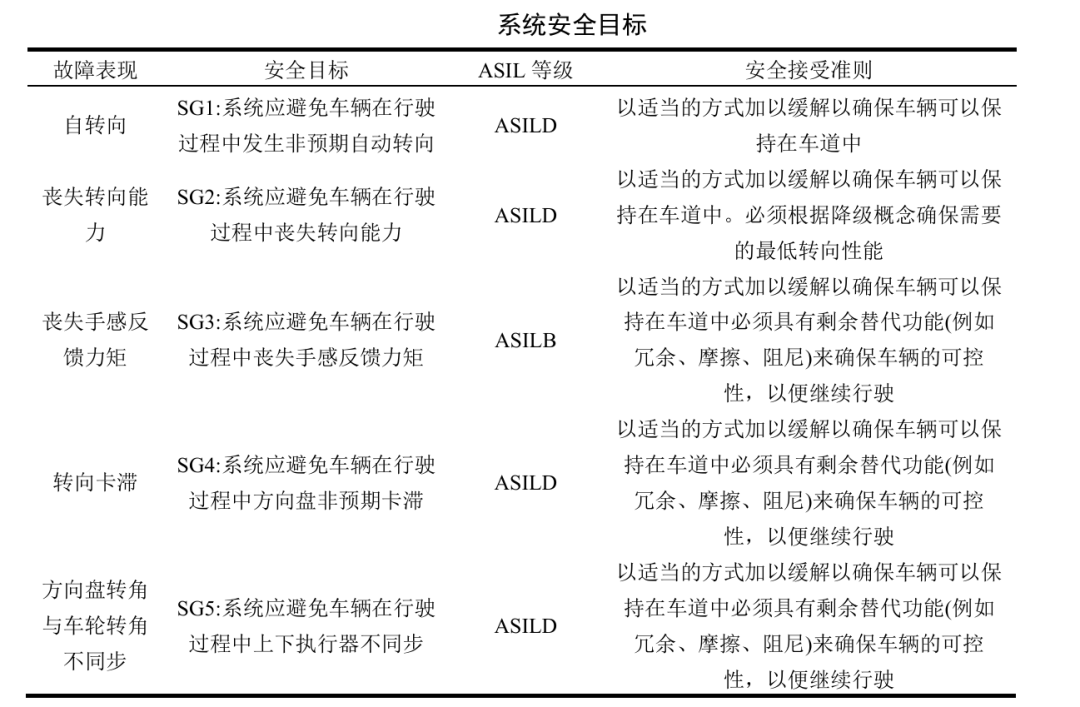
在SBW系统中传感器与执行器出现问题时,所暴露出的故障表现形式所对应 的汽车安全性等级如下表所示。表中展示了在SBW系统中,传感器与执行器的 各类故障表现,并根据严重度、暴露度及可控性来评估ASIL等级
总的来说系统功能失效主要表现为以下几种情况: (1)系统功能完全丧失,启动后没有任何响应,无法正常工作; (2)系统功能出现偏差,启动后提供的功能与预期不一致,可能超出、低于 或与预期相反; (3)系统出现非预期功能,启动后表现出与设计目标不同的功能; (4)系统卡死,启动后进入某种状态不变。线控转向系统的主要失效因素包括:
-
软件失效:可能由编程错误、算法缺陷或数据处理不当引起,导致控制逻辑混 乱、响应延迟甚至系统崩溃。
-
硬件失效:涉及传感器失灵、执行器故障等物理设备故障,影响系统正常工作 或性能。
-
通讯失效:信号丢失、干扰等问题导致控制器无法接收传感器信号或执行器无 法接收控制指令。
-
电源失效:电压不稳、断电等问题影响系统正常供电,可能导致系统无法正常 工作或性能下降。
根据故障发生时所造成的后果对其划分SBW故障危害等级:
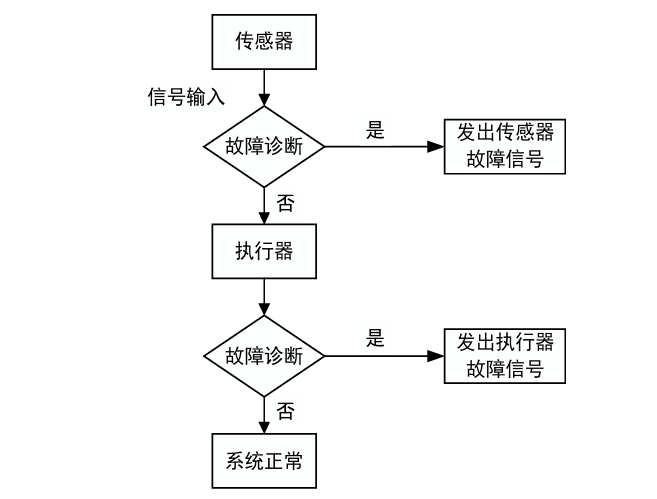
基于SBW 系统可靠性以及失效模式及影响分析,对故障优先等级进行划分。 无论执行器是否出现故障,当传感器出现故障时会给出错误的参数信息,导致ECU 发出错误的转向执行控制信号。所以应首先判断传感器是否故障为第一优先级,然 后再判断执行器故障与否。诊断流程如下:
5 总结
汽车转向控制正朝着智能化、电子化方向快速发展。
技术上,线控转向技术逐步普及,它取消机械连接,以电信号控制,响应更快、设计更灵活,如蔚来 ET9 的线控转向系统可智能调整转向比。电动助力转向系统也在升级,从 C-EPS 向 DP-EPS 和 R-EPS 发展。
智能化方面,转向控制与智能驾驶深度融合,能实现更精准的转向力矩控制,还会应用更多智能控制技术,如自适应转向系统。市场上,随着新能源汽车和智能驾驶技术发展,市场规模持续增长,国产替代也在加速。