基于ORB-SLAM、A*及DWA的自主导航方案
REF:基于 SLAM 技术的路径规划及避障研究
1. SLAM建图
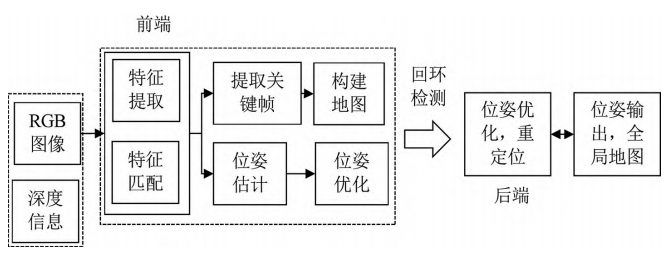
RGB-D SLAM 算法包括前端和后端,前端对 RGB 图像和深度信息进行特征提取和匹配,提取关键帧和位姿估计后,构建地图和位姿优化,后端对传输的地图、位姿再次进行位姿优化和重定位,最终输出位姿和全局地图。
图像间的距离表示如下,其中:
Ra 、Rb 和 t a 、t b :分别表示 2 个图像帧的选择矩阵和平移向量
r :表示权重系数。根据旋转对应的相机位姿变化,设置为 1. 6

2. 路径规划
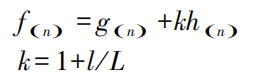
基于剩余距离优化A*算法启发函数:基于当前节点 n 和起始点 s 到目标点 t 的距离的比值,作为启发函数权重
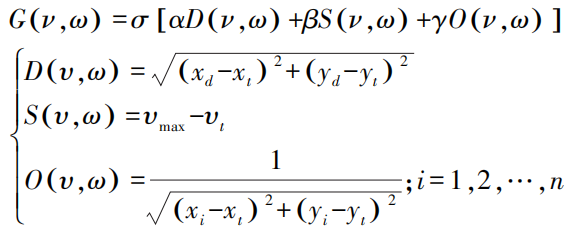
DWA评价函数:
σ、α、β、γ:分别为总代价、目标距离代价、速度代价、障碍物距离代价的单位代价加权系数,分别为 0. 05、0. 08、0. 1 和 0. 3
(xt,yt )、(xd,yd) 、(xi,yi ):分别表示预测节点、目标节点和第 i 个障碍物的坐标位置
υmax 和 υt :分别为自动导引小车的最大速度和预测速度空间的速度
D(ν,ω) 和 O(ν,ω) :表示速度采样空间至目标点位置和障碍物的距离代价
G(ν,ω) 和 S(ν,ω) :分别为速度采样空间的总代价和速度代价
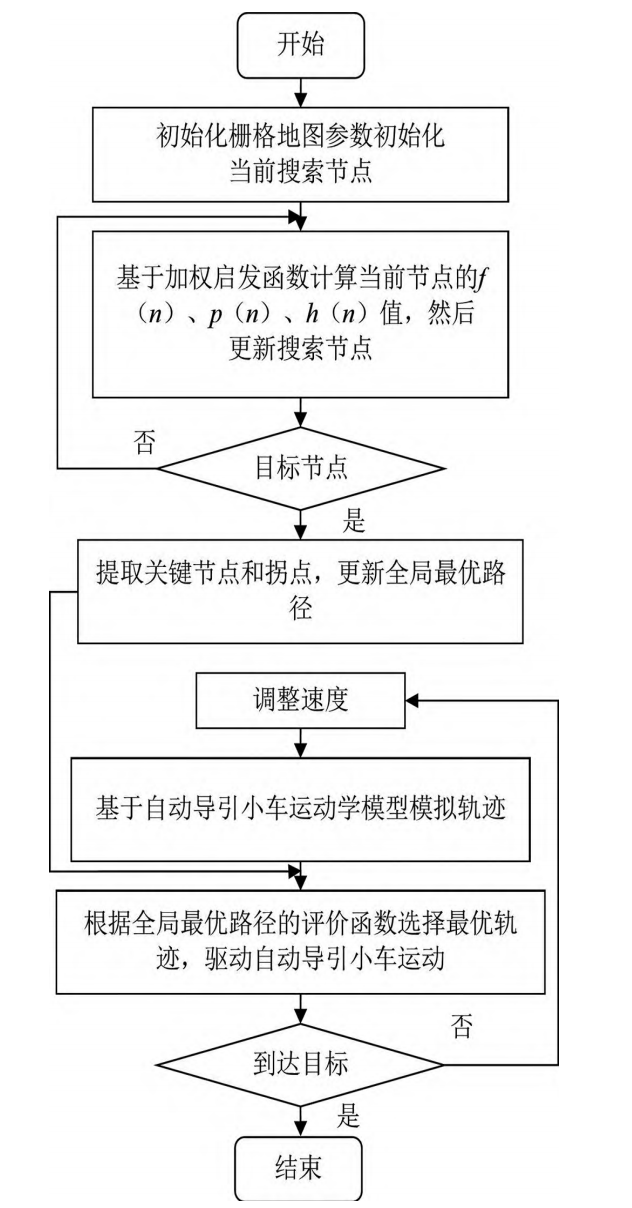
融合A*和DWA:改进 A∗-DWA 算法流程主要分为五个步骤
初始化栅格地图和AGV参数,初设当前搜索节点
采用加权启发函数求出当前节点的 f(n) 、p (n) 、h(n) 值,并确定搜索节点
更新搜索节点,对目标节点提取关键节点并删除冗余节点和拐点,并更新全局最优路径
采用DWA算法进行AGV速度选择,并构建基于 AGV 运动学模型模拟小车运动轨迹
根据全局最优路径的评价函数选择最优轨迹,从而驱动AGV进行运动,最后达到目标点则得到最优路径,算法终止。