梦幻联动!卡尔曼滤波结合LSTM,精度提高19%!
LSTM与卡尔曼滤波的融合正成为时序建模领域的热门突破点!《IEEE IoT Journal》《KDD》等顶刊顶会收录的研究成果,成功解决了传统模型的核心痛点:LSTM虽擅长捕捉时序数据的长期依赖关系,却对观测噪声敏感,易出现预测漂移;而卡尔曼滤波能通过状态估计动态抑制噪声干扰,却难以建模非线性时序特征。两者结合,新架构展现出超强性能:比如在无人机轨迹预测任务中,LSTM-卡尔曼滤波混合模型较纯LSTM预测误差降低25%,抗干扰能力提升3倍;在电力系统频率预测中,该融合方案也让短期预测精度提高19%,有效规避了极端天气下的预测偏差问题。
对于想发这个方向的论文er,可重点关注非线性卡尔曼滤波改进、多传感器时序融合、轻量化混合架构设计等方向。为帮大家快速上手,我整理了相关顶会/顶刊核心论文,涵盖不同时序任务的实现方案,部分还附带复现代码打包免费送,感兴趣的同学工种号 沃的顶会 扫码回复 “长短卡尔曼” 领取。
A Novel Approach for Real-Time Estimation of State of Charge in Li-Ion Battery Through Hybrid Methodology
文章解析
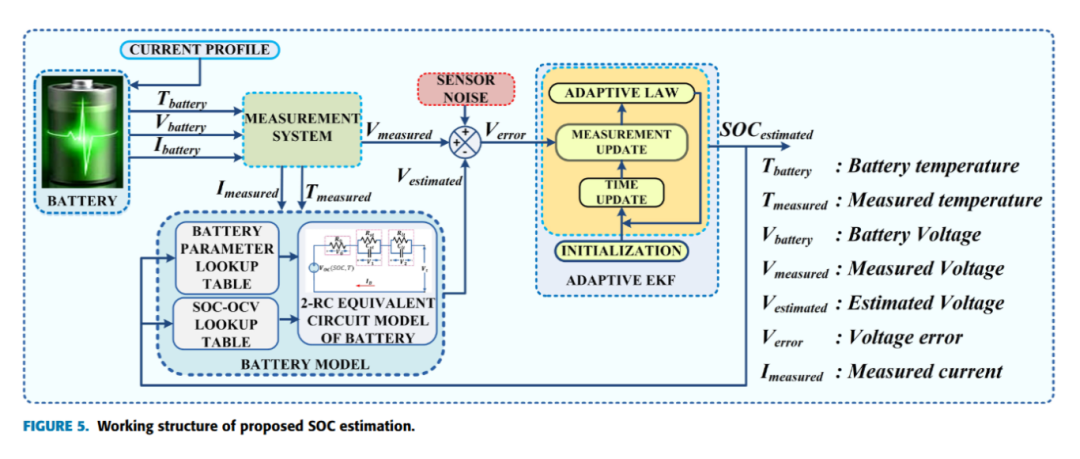
文章提出一种结合自适应扩展卡尔曼滤波(AEKF)与库仑计数法的锂离子电池荷电状态(SOC)估计方法,经实验验证,该方法能有效降低计算复杂度,提高估计精度,适用于多种电池类型。
创新点
融合AEKF与库仑计数技术,利用两者优势,在提升SOC估计精度的同时降低计算复杂度。
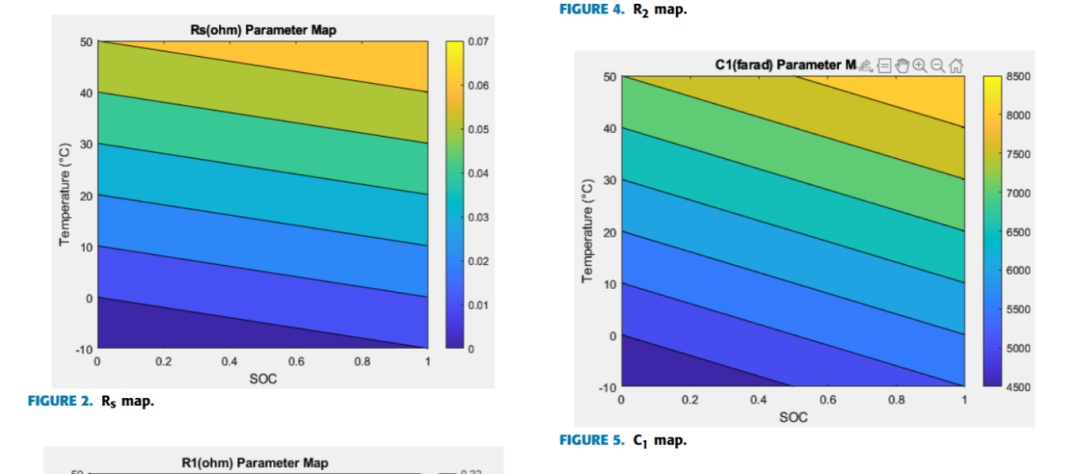
采用二阶等效电路模型(ECM),平衡模型复杂度与对电池动态特性的表征能力,提高估计准确性。
通过引入自适应调整测量噪声协方差的机制,增强算法在不同噪声环境下的鲁棒性和稳定性。
研究方法
构建二阶ECM,结合HPPC测试和AFFRLS算法获取模型参数。
基于AEKF算法,动态调整噪声协方差,校正库仑计数法的估计值。
在STM32f1等微控制器平台上进行实验,模拟多种工况测试算法性能。
对比AEKF与其他方法,从估计精度、执行时间等方面评估算法优势。
研究结论
所提混合方法能有效克服传统方法的局限性,将SOC估计误差降低至2%以内,计算复杂度降低约70%。
该方法在多种电池类型和工况下均表现出良好的适应性和可靠性,估计精度高且执行时间短。
未来可进一步拓展实验范围,优化AEKF参数,探索与机器学习技术融合,提升其性能。
A Noise Covariance Regulated Robust Modified Adaptive Extended Kalman Filter for State of Charge Estimation of Lithium-Ion Battery
文章解析
文章针对锂离子电池荷电状态(SOC)估计问题,提出RMAEKF算法,通过调节噪声协方差提升估计精度。经多种工况测试及对比分析,验证了算法在不同条件下的有效性和适用性。
创新点
设计自适应校正因子,依据状态预测误差更新过程噪声协方差矩阵,增强滤波器对温度变化的鲁棒性。
引入测量噪声协方差矩阵的自适应调整规则,提升算法在传感器测量存在偏差时的收敛速度与估计精度。
评估算法的平均执行时间和计算复杂度,确保其在实际电池管理系统应用中的成本效益 。
研究方法
构建2-RC等效电路模型,利用HPPC测试获取电池参数,并通过实验确定SOC-OCV曲线。
提出RMAEKF算法,结合自适应噪声校正规则,实现对SOC的在线估计。
以RMSE和MAE为评估指标,对比RMAEKF与其他算法在不同工况下的SOC估计精度。
使用OPAL-RT实时模拟器进行实验,验证算法在实际应用中的性能。
研究结论
RMAEKF算法能有效处理电池模型线性化和温度变化带来的不确定性,提升SOC估计精度。
该算法在多种复杂工况下表现出良好的鲁棒性,计算复杂度与其他算法相近,但估计精度更高。
基于OPAL-RT的实时仿真表明,RMAEKF算法适用于实际的电池管理系统在线SOC估计。