从零实现 vLLM (1.2):如何实现张量并行
前言
在上篇文章《从零实现 vLLM (1.1):并行词嵌入 VocabParallelEmbedding》中,我们分析了 Qwen3Model 模型中第一个组件:VocabParallelEmbedding 的源码。今天这篇文章我们深入到 Qwen3DecoderLayer 的第一个核心组件:Qwen3Attention,重点分析 QKVParallelLinear 和 RowParallelLinear,这里涉及了推理引擎的核心概念:张量并行。
张量并行(Tensor Parallelism)在大模型推理引擎中至关重要,可以说是核心技术之一。
原因主要有两点:
-
解决单张 GPU 显存不足的问题:现在的大模型(比如拥有几百上千亿参数的模型)的权重矩阵非常巨大,单张 GPU 根本放不下。张量并行通过将这些巨大的权重矩阵(比如线性层中的权重)切分到多张 GPU 上,使得模型能够被成功加载和运行。
ColumnParallelLinear(列并行)和RowParallelLinear(行并行)就是将一个大的矩阵运算拆分给多个 GPU 协同完成。 -
实现计算加速:张量并行不仅解决了存储问题,还能将计算任务(主要是矩阵乘法)也分配到多个 GPU 上同时执行,从而显著提升推理速度。文中 NumPy 的示例清晰地展示了,如何将计算任务分配到两个模拟的 GPU 上,并通过
All-Reduce等通信操作最终得到和单 GPU 一样的正确结果,但过程是并行的。
总而言之,没有张量并行技术,我们就无法在现有的硬件上高效地运行那些参数量巨大的模型。它是支撑大模型从训练走向实际应用(推理)的关键基石。
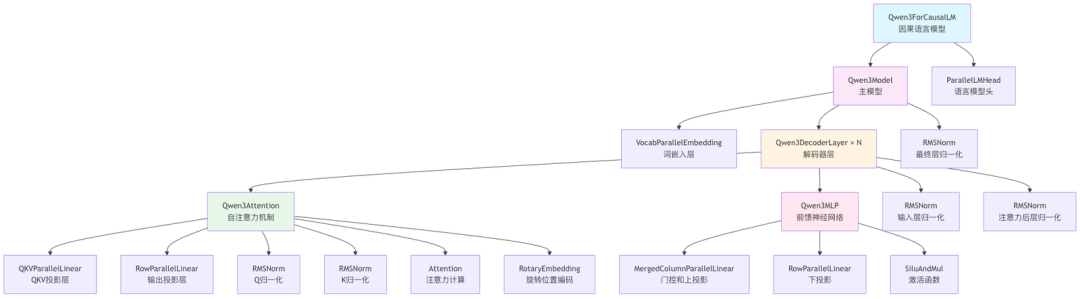
Qwen3Attention 的核心组件如下图所示,我们分析前面两个组件:QKVParallelLinear 和 RowParallelLinear。
Qwen3Attention (继承自 nn.Module)
├── qkv_proj: QKVParallelLinear (用于合并计算 Q, K, V)
│ └── (继承自) ColumnParallelLinear (列并行层)
│ └── (继承自) LinearBase (并行层抽象基类)
│
├── o_proj: RowParallelLinear (用于 Attention 输出)
│ └── (继承自) LinearBase (并行层抽象基类)
│
├── rotary_emb: RotaryEmbedding (旋转位置编码)
│
├── attn: Attention (底层 Attention 计算核心)
│ └── (使用) Context (用于获取 prefill/decode 状态及相关参数)
│
├── q_norm: RMSNorm (对 Query 向量进行归一化)
│
└── k_norm: RMSNorm (对 Key 向量进行归一化)
GPU 张量并行计算过程详解:代码与结果分析
张量并行就是将线性代数中的矩阵运算规则,巧妙地应用于分布式计算中。通过线性代数中的矩阵分块和乘法法则,拆解成可以在多个设备上独立执行的小任务,最后再通过特定的通信操作将结果聚合,从而实现加速。
下面通过一个具体的例子,逐步演示张量并行技术中“列并行”和“行并行”的计算过程。我们将首先在模拟的单个设备上进行标准矩阵乘法作为基准,然后模拟在两个 GPU 上并行计算,并验证结果的一致性。
一、 环境设置与数据准备
首先,我们设置计算环境,定义矩阵维度,并创建模拟数据。
代码:
import numpy as np# 设置随机种子以保证每次运行结果都一样,方便验证
np.random.seed(42)
# 设置numpy的打印选项,让输出更整洁(不使用科学计数法)
np.set_printoptions(suppress=True)# 模拟有 2 个 GPU
gpu_count = 2# 定义矩阵维度
seq_len = 2 # 序列长度
input_dim = 2 # 输入特征维度
hidden_dim = 4 # 隐藏层维度, 设为4方便2个GPU平分
output_dim = 2 # MLP后输出维度# 创建随机整数矩阵来模拟输入和权重
input_activations = np.random.randint(1, 10, size=(seq_len, input_dim))
weights_A = np.random.randint(1, 10, size=(input_dim, hidden_dim))
weights_B = np.random.randint(1, 10, size=(hidden_dim, output_dim))
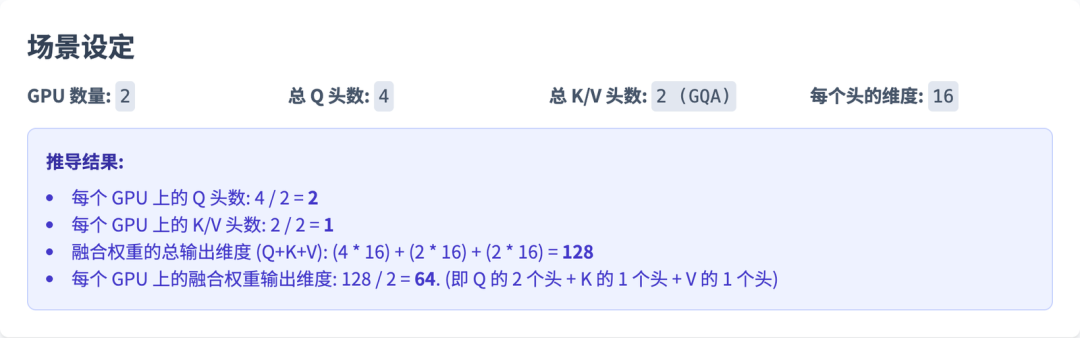
我们导入 numpy 库用于科学计算。通过设置固定的随机种子,确保每次生成的随机矩阵都是相同的,便于复现和验证。我们定义了本次模拟的场景:2个GPU,输入矩阵 X 的维度为 (2, 2),第一个权重矩阵 A 的维度为 (2, 4),第二个权重矩阵 B 的维度为 (4, 2)。

--- 场景设置 (Scenario Setup) ---
模拟GPU数量: 2
输入激活值维度 (seq_len, input_dim): (2, 2)
第一个线性层权重维度 (input_dim, hidden_dim): (2, 4)
第二个线性层权重维度 (hidden_dim, output_dim): (4, 2)
----------------------------------------
二、 基准计算 (模拟单 GPU)
在进行并行计算前,我们先在一个设备上完整地计算一次,作为后续验证的“正确答案”。
2.1 第一个线性层计算
intermediate_activations_baseline = input_activations @ weights_A
@ 符号是 Python 中用于 矩阵乘法 的专用运算符。在 NumPy 库中,A @ B 就等同于 np.matmul(A, B),专门用来计算两个矩阵的乘积。
我们计算输入激活值 input_activations 与第一个权重矩阵 weights_A 的乘积,得到中间激活值。
输出结果:

--- 1. 基准计算 (在单个设备上) ---计算 intermediate_activations = input_activations @ weights_A
输入激活值 input_activations ((2, 2)):
[[7 4][8 5]]权重 weights_A ((2, 4)):
[[7 3 7 8][5 4 8 8]]--> 中间激活值 intermediate_activations_baseline ((2, 4)):
[[ 69 37 81 88][ 81 44 96 104]]
2.2 第二个线性层计算
output_baseline = intermediate_activations_baseline @ weights_B
接着,用上一步得到的中间激活值 intermediate_activations_baseline 与第二个权重矩阵 weights_B 相乘,得到最终的输出结果。
输出结果:
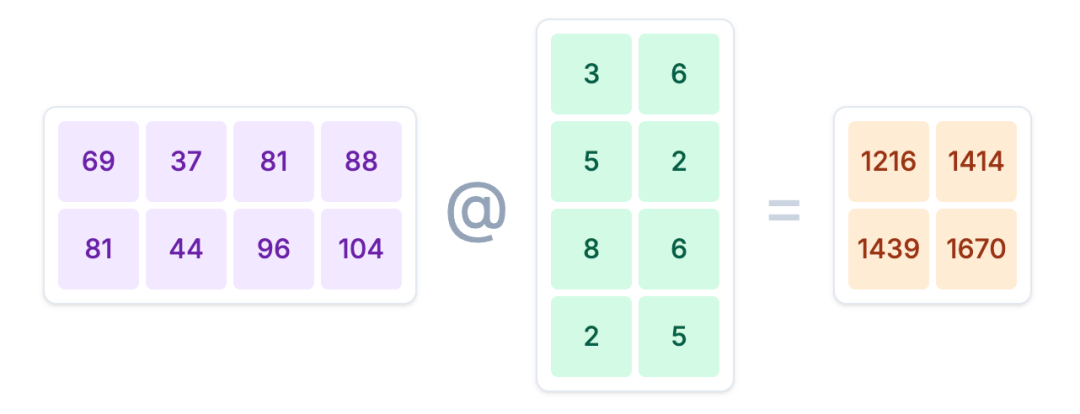
计算 output = intermediate_activations_baseline @ weights_B
输入中间激活值 intermediate_activations_baseline ((2, 4)):
[[ 69 37 81 88][ 81 44 96 104]]权重 weights_B ((4, 2)):
[[3 6][5 2][8 6][2 5]]--> 最终输出 output_baseline ((2, 2)):
[[1216 1414][1439 1670]]
三、 模拟列并行 (Column Parallelism)
现在,我们模拟第一个线性层的“列并行”计算过程。
3.1 按列分割权重矩阵
split_size_A = hidden_dim // gpu_count
weights_A1 = weights_A[:, :split_size_A]
weights_A2 = weights_A[:, split_size_A:]
列并行的核心思想是将权重矩阵 weights_A 沿 列 的方向切分,然后将不同的切片分发给不同的 GPU。这里我们将其垂直切成 weights_A1 和 weights_A2 两部分。
输出结果:
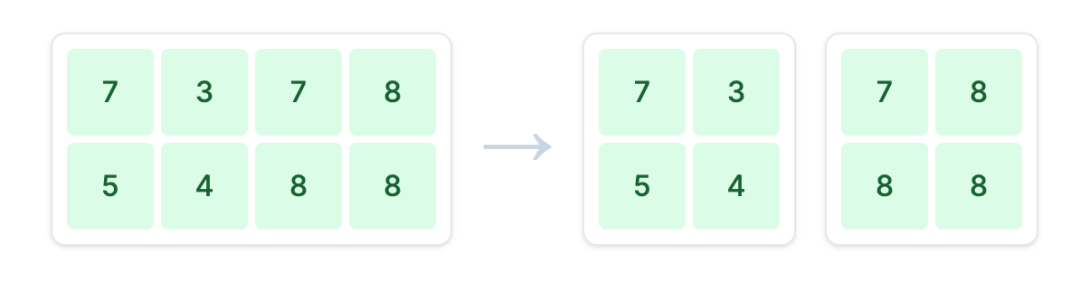
--- 2. 模拟列并行 (第一个线性层) ---将 weights_A ((2, 4)) 按列分割成 weights_A1 ((2, 2)) 和 weights_A2 ((2, 2))
3.2 在不同 GPU 上并行计算
# GPU 0
intermediate_1 = input_activations @ weights_A1
# GPU 1
intermediate_2 = input_activations @ weights_A2
每个 GPU 使用完整的输入 input_activations 和自己分到的权重切片进行计算,得到部分的中间激活值。
输出结果:
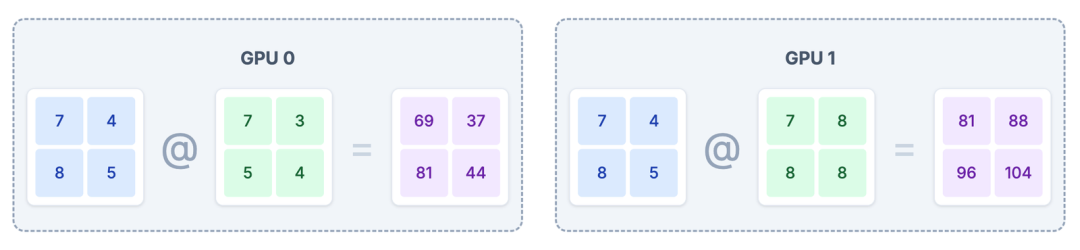
--- GPU 0 计算: intermediate_1 = input_activations @ weights_A1 ---
输入激活值 input_activations ((2, 2)):
[[7 4][8 5]]
权重切片 weights_A1 ((2, 2)):
[[7 3][5 4]]
--> 输出中间激活值切片 intermediate_1 ((2, 2)):
[[69 37][81 44]]--- GPU 1 计算: intermediate_2 = input_activations @ weights_A2 ---
输入激活值 input_activations ((2, 2)):
[[7 4][8 5]]
权重切片 weights_A2 ((2, 2)):
[[7 8][8 8]]
--> 输出中间激活值切片 intermediate_2 ((2, 2)):
[[ 81 88][ 96 104]]
3.3 聚合结果 (All-Gather)
intermediate_activations_tp = np.concatenate((intermediate_1, intermediate_2), axis=1)
在各自完成计算后,需要通过 All-Gather 操作将所有 GPU 上的计算结果 intermediate_1 和 intermediate_2 沿列(axis=1)拼接起来,恢复完整的中间激活值。注意:这里面的All-Gather 只是为了方便跟前面的单 GPU 计算结果进行对照,在实际计算过程中不需要这一步。
输出结果:
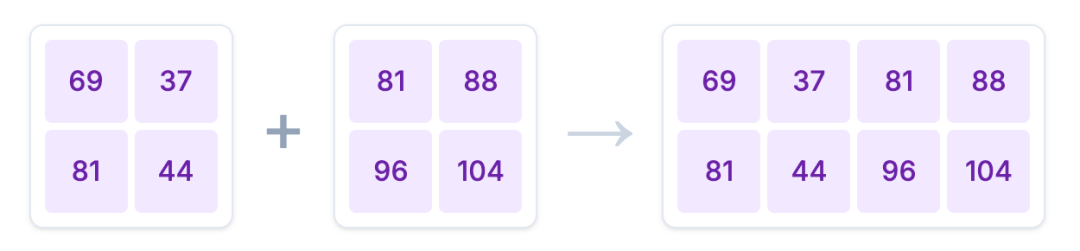
--- All-Gather 聚合 ---
拼接 intermediate_1 和 intermediate_2 得到 intermediate_activations_tp ((2, 4)):
[[ 69 37 81 88][ 81 44 96 104]]
3.4 验证结果
is_close_intermediate = np.allclose(intermediate_activations_baseline, intermediate_activations_tp)
assert is_close_intermediate, "列并行计算结果与基准不符!"
最后,我们验证并行计算的结果与基准结果是否一致。
输出结果:
列并行结果验证: ✅ 成功
四、 模拟行并行 (Row Parallelism)
接下来,我们模拟第二个线性层的“行并行”计算过程。行并行的输入是上一步列并行得到的、已经被切分在不同 GPU 上的中间激活值。
4.1 按行分割权重矩阵
split_size_B = hidden_dim // gpu_count
weights_B1 = weights_B[:split_size_B, :]
weights_B2 = weights_B[split_size_B:, :]
与列并行相反,行并行将权重矩阵 weights_B 沿 行 的方向切分,分发给不同的 GPU。
输出结果:
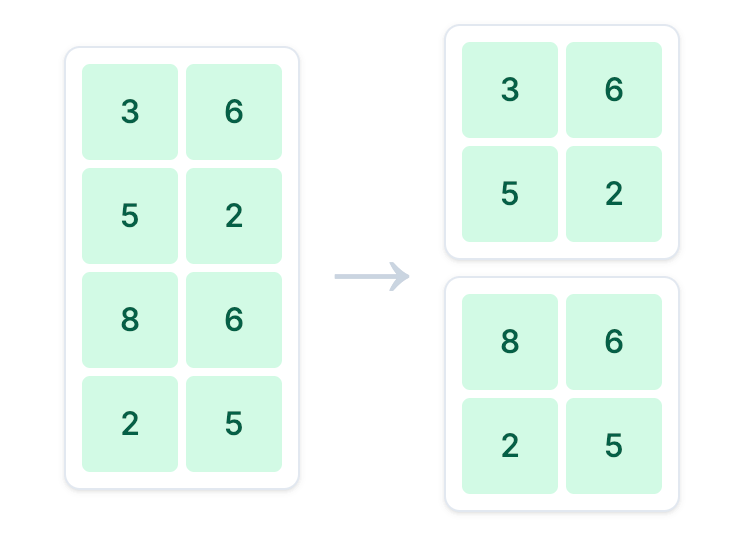
--- 3. 模拟行并行 (第二个线性层) ---将 weights_B ((4, 2)) 按行分割成 weights_B1 ((2, 2)) 和 weights_B2 ((2, 2))
4.2 在不同 GPU 上并行计算
# GPU 0
output_part_1 = intermediate_1 @ weights_B1
# GPU 1
output_part_2 = intermediate_2 @ weights_B2
每个 GPU 使用自己拥有的 部分 中间激活值(intermediate_1 或 intermediate_2)和 部分 权重(weights_B1 或 weights_B2)进行计算,得到最终输出的一个部分。
输出结果:
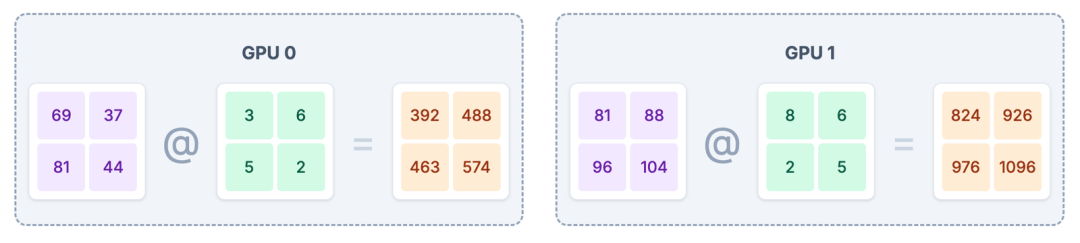
--- GPU 0 计算: output_part_1 = intermediate_1 @ weights_B1 ---
输入中间激活值切片 intermediate_1 ((2, 2)):
[[69 37][81 44]]
权重切片 weights_B1 ((2, 2)):
[[3 6][5 2]]
--> 输出部分结果 output_part_1 ((2, 2)):
[[392 488][463 574]]--- GPU 1 计算: output_part_2 = intermediate_2 @ weights_B2 ---
输入中间激活值切片 intermediate_2 ((2, 2)):
[[ 81 88][ 96 104]]
权重切片 weights_B2 ((2, 2)):
[[8 6][2 5]]
--> 输出部分结果 output_part_2 ((2, 2)):
[[ 824 926][ 976 1096]]
4.3 聚合结果 (All-Reduce)
output_tp = output_part_1 + output_part_2
行并行计算完成后,需要通过 All-Reduce 操作将所有 GPU 上的部分输出 相加,得到最终的完整输出。
输出结果:
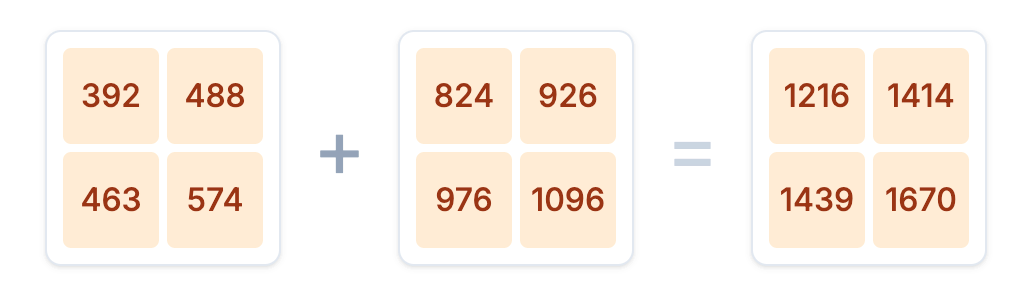
--- All-Reduce 聚合 ---
求和 output_part_1 + output_part_2 得到最终输出 output_tp ((2, 2)):
[[1216 1414][1439 1670]]
4.4 验证结果
is_close_output = np.allclose(output_baseline, output_tp)
assert is_close_output, "行并行计算结果与基准不符!"
我们再次验证行并行计算的最终结果与基准结果是否一致。
输出结果:
行并行结果验证: ✅ 成功
通过这个过程,我们清晰地看到,通过对权重矩阵进行巧妙的切分(列并行或行并行),并将计算任务分配到不同设备上,最后通过特定的通信操作(All-Gather 或 All-Reduce)聚合结果,可以实现与单设备计算完全相同的结果,这就是张量并行的基本原理。

上面是整个完整过程的图示,眼尖的你可能会发现,计算过程里面是不是少了激活函数?确实,我省略了非线性激活函数(如 GeLU 或 ReLU)。
在一个完整的 Transformer MLP 模块中,其计算流程应该是:
-
第一个线性层(列并行):
intermediate = input @ weights_A -
激活函数(逐元素操作):
activated_intermediate = GeLU(intermediate) -
第二个线性层(行并行):
output = activated_intermediate @ weights_B
为什么在演示中省略了它?主要原因是为了简化并聚焦于核心概念。这个可视化的主要目的是清晰地展示张量并行如何处理矩阵乘法(线性层)这一计算瓶颈,即:
-
如何通过列切分权重
A来实现第一个线性层的并行(Column Parallelism)。 -
如何通过行切分权重
B来实现第二个线性层的并行(Row Parallelism)。 -
以及后续的 All-Reduce 通信操作。
激活函数(如 GeLU)是一个逐元素(element-wise)的操作。在并行计算的场景下,它非常简单:每个 GPU 只需对自己本地持有的那部分中间激活值(intermediate_1 和 intermediate_2)独立应用激活函数即可,不需要任何跨 GPU 的通信。
因此,为了让演示不被枝节带偏,我们暂时省略了这一步,以便让大家能更清楚地看到矩阵分割与聚合的完整过程。
ColumnParallelLinear和RowParallelLinear源码分析
在通过 NumPy 模拟理解了张量并行的基本原理后,我们现在来深入分析 vLLM 中实现这一机制的核心 PyTorch 代码:ColumnParallelLinear 和 RowParallelLinear,以及它们的抽象基类 LinearBase。
1.LinearBase:并行线性层的基石
LinearBase 是一个抽象基类(nn.Module),它为所有并行的线性层提供了基础框架和通用属性。
class LinearBase(nn.Module):def __init__(self,input_size: int,output_size: int,tp_dim: int | None = None,):super().__init__()self.input_size = input_sizeself.output_size = output_sizeself.tp_dim = tp_dim # 张量并行的维度 (0 for column, 1 for row)self.tp_rank = dist.get_rank() # 当前 GPU 的 rankself.tp_size = dist.get_world_size() # 并行组的大小 (GPU 数量)def forward(self, x: torch.Tensor) -> torch.Tensor:raise NotImplementedError
源码解析:
-
__init__方法:-
它初始化了所有并行层都需要的通用参数。
-
input_size和output_size:定义了整个(未分割前)线性层的输入和输出维度。 -
tp_dim:这是一个关键参数,用于标识张量是在哪个维度上进行切分的。我们约定0代表列并行(在输出维度上切分),1代表行并行(在输入维度上切分)。 -
tp_rank和tp_size:通过torch.distributed获取当前 GPU 在分布式环境中的排名(rank)和总数(world size),这对于加载正确的数据分片至关重要。
-
-
forward方法:-
它被定义为必须由子类实现的抽象方法,因为列并行和行并行的前向传播逻辑是不同的。
-
2.ColumnParallelLinear:实现列并行
这个类继承自 LinearBase,实现了列并行功能。它对应我们 NumPy 示例中的第一个线性层计算。
class ColumnParallelLinear(LinearBase):def __init__(self,input_size: int,output_size: int,bias: bool = False,):super().__init__(input_size, output_size, 0)self.input_size_per_partition = input_sizeself.output_size_per_partition = divide(output_size, self.tp_size)self.weight = nn.Parameter(torch.empty(self.output_size_per_partition, self.input_size))self.weight.weight_loader = self.weight_loaderif bias:self.bias = nn.Parameter(torch.empty(self.output_size_per_partition))self.bias.weight_loader = self.weight_loaderelse:self.register_parameter("bias", None)def weight_loader(self, param: nn.Parameter, loaded_weight: torch.Tensor):param_data = param.datashard_size = param_data.size(self.tp_dim) # self.tp_dim = 0start_idx = self.tp_rank * shard_sizeloaded_weight = loaded_weight.narrow(self.tp_dim, start_idx, shard_size)param_data.copy_(loaded_weight)def forward(self, x: torch.Tensor) -> torch.Tensor:# 输入 x 是完整的,未经切分return F.linear(x, self.weight, self.bias)
源码解析:
-
__init__方法:-
super().__init__(..., 0):明确设置tp_dim=0,表示这是一个列并行层。 -
output_size_per_partition:将总的output_size除以 GPU 数量tp_size。这正是列并行的核心:将权重矩阵W按列(输出维度)切分。 -
self.weight:权重参数weight的形状是(output_size_per_partition, input_size),即每个 GPU 只持有权重矩阵的一部分列。
-
-
weight_loader方法:-
这个辅助函数负责将一个完整的权重张量(
loaded_weight)正确地切分并加载到当前 GPU 的param中。 -
它使用
torch.Tensor.narrow方法,根据当前 GPU 的tp_rank,从完整权重的第0维(列)中,提取出属于自己的那一块。
-
-
forward方法:-
输入
x是完整的、未切分的张量。 -
它执行标准的线性运算
F.linear(x, self.weight, self.bias)。 -
由于
self.weight是按列切分的,所以输出张量也是按列(特征维度)切分的。这个切分后的输出可以直接作为后续行并行层的输入。这里不需要通信操作(如 All-Gather),因为下一个层(RowParallelLinear)被设计为直接处理这种切分后的输入。
-
3.RowParallelLinear:实现行并行
这个类同样继承自 LinearBase,它接收 ColumnParallelLinear 的输出,并执行行并行计算。它对应我们 NumPy 示例中的第二个线性层计算。
class RowParallelLinear(LinearBase):def __init__(self,input_size: int,output_size: int,bias: bool = False,):super().__init__(input_size, output_size, 1)self.input_size_per_partition = divide(input_size, self.tp_size)self.output_size_per_partition = output_sizeself.weight = nn.Parameter(torch.empty(self.output_size, self.input_size_per_partition))self.weight.weight_loader = self.weight_loaderif bias:self.bias = nn.Parameter(torch.empty(self.output_size))self.bias.weight_loader = self.weight_loaderelse:self.register_parameter("bias", None)def weight_loader(self, param: nn.Parameter, loaded_weight: torch.Tensor):param_data = param.datashard_size = param_data.size(self.tp_dim) # self.tp_dim = 1start_idx = self.tp_rank * shard_sizeloaded_weight = loaded_weight.narrow(self.tp_dim, start_idx, shard_size)param_data.copy_(loaded_weight)def forward(self, x: torch.Tensor) -> torch.Tensor:# 输入 x 是按特征维度切分过的y = F.linear(x, self.weight, self.bias if self.tp_rank == 0elseNone)if self.tp_size > 1:dist.all_reduce(y) # 对所有 GPU 的结果求和return y
源码解析:
-
__init__方法:-
super().__init__(..., 1):明确设置tp_dim=1,表示这是一个行并行层。 -
input_size_per_partition:将总的input_size除以 GPU 数量。这是因为它的输入x(来自前一个列并行层)的特征维度是切分过的。 -
self.weight:权重参数weight的形状是(output_size, input_size_per_partition)。这正是行并行的核心:将权重矩阵W按行(输入维度)切分。
-
-
weight_loader方法:-
与
ColumnParallelLinear类似,但它是在第1维(行)上对权重进行切分加载。
-
-
forward方法:-
输入
x是一个在特征维度上被切分了的张量。 -
每个 GPU 使用自己的部分输入
x和部分权重self.weight计算出一个部分的输出y。 -
dist.all_reduce(y):这是行并行的关键步骤。该操作会将所有 GPU 计算出的部分结果y逐元素相加,并将最终的完整结果同步到所有 GPU 上。这完美对应了 NumPy 示例中的output_part_1 + output_part_2。 -
Bias 处理:注意
bias只在tp_rank == 0的 GPU 上添加,这是因为all_reduce会将所有 GPU 的结果相加,如果不做处理,bias会被加tp_size次。通过只在一个 GPU 上添加,可以保证最终结果的正确性。
-
通过这三个类的精妙设计与协作,nano-vllm 高效地实现了张量并行,将大模型的计算压力分散到多个 GPU 上,同时保证了计算结果的准确性。
QKVParallelLinear源码分析
在 Transformer 模型中,注意力(Attention)机制需要分别计算查询(Query)、键(Key)和值(Value)三个投影。一种常见的优化是使用一个单独的、更宽的线性层一次性计算出 Q, K, V,然后再将结果切分开。QKVParallelLinear 就是这个优化方法的实现,它继承自 ColumnParallelLinear,专门用于高效地并行计算 Q, K, V 投影。
class QKVParallelLinear(ColumnParallelLinear):def __init__(self,hidden_size: int,head_size: int,total_num_heads: int,total_num_kv_heads: int | None = None,bias: bool = False,):self.head_size = head_sizeself.total_num_heads = total_num_heads# 支持分组查询注意力 (GQA),如果 K/V 头数未指定,则默认为 Q 的头数self.total_num_kv_heads = total_num_kv_heads or total_num_headstp_size = dist.get_world_size()# 计算每个 GPU 分到的头数self.num_heads = divide(self.total_num_heads, tp_size)self.num_kv_heads = divide(self.total_num_kv_heads, tp_size)input_size = hidden_size# 计算融合后的总输出维度output_size = (self.total_num_heads + 2 * self.total_num_kv_heads) * self.head_size# 调用父类 ColumnParallelLinear 的初始化方法super().__init__(input_size, output_size, bias)def weight_loader(self, param: nn.Parameter, loaded_weight: torch.Tensor, loaded_shard_id: str):param_data = param.dataassert loaded_shard_id in ["q", "k", "v"]# 根据加载的是 Q, K, 还是 V,计算在本地权重中的偏移量if loaded_shard_id == "q":shard_size = self.num_heads * self.head_sizeshard_offset = 0elif loaded_shard_id == "k":shard_size = self.num_kv_heads * self.head_sizeshard_offset = self.num_heads * self.head_sizeelse: # loaded_shard_id == "v"shard_size = self.num_kv_heads * self.head_sizeshard_offset = self.num_heads * self.head_size + self.num_kv_heads * self.head_size# 定位到本地参数中要填充的区域param_data = param_data.narrow(self.tp_dim, shard_offset, shard_size)# 将完整的 Q/K/V 权重按列切分,获取当前 rank 对应的分片loaded_weight = loaded_weight.chunk(self.tp_size, self.tp_dim)[self.tp_rank]# 将权重分片拷贝到指定位置param_data.copy_(loaded_weight)源码解析:
-
__init__方法:-
input_size就是模型的hidden_size。 -
output_size是 Q, K, V 三者维度之和。对于支持 GQA 的模型,总输出维度为(Q头数 + K头数 + V头数) * 每个头的维度。
-
目的:初始化一个能够同时处理 Q, K, V 计算的列并行层。
-
参数:除了标准的
hidden_size和bias,它还接收head_size(每个头的维度)、total_num_heads(Q 的总头数)和total_num_kv_heads(K 和 V 的总头数)。支持total_num_kv_heads是为了兼容分组查询注意力(Grouped-Query Attention, GQA),其中 K 和 V 的头数可以少于 Q。 -
维度计算:
-
继承与初始化:它计算出总的
output_size后,直接调用父类ColumnParallelLinear的__init__方法。这意味着QKVParallelLinear本质上就是一个权重矩阵被按列(输出维度)切分到不同 GPU 上的ColumnParallelLinear层。
-
-
weight_loader方法:-
目的:这是
QKVParallelLinear的核心所在。它重写了父类的weight_loader,以一种更复杂的方式加载权重。因为 Q, K, V 的权重通常是分开存储的,需要被正确地加载到这个融合后的大权重矩阵的相应位置。 -
loaded_shard_id:这个参数至关重要,它告诉加载器当前正在加载的是 "q", "k", 还是 "v" 的权重。 -
加载逻辑:
-
计算偏移量 (
shard_offset**)**:根据loaded_shard_id,代码计算出当前权重(Q, K 或 V)应该被放置在每个 GPU 本地持有的权重分片中的哪个位置。例如,Q 放在最前面(偏移量为0),K 跟在 Q 后面,V 跟在 K 后面。 -
定位本地参数区域:使用
param_data.narrow()从本地的融合大权重中精确地切出将要填充 Q, K, 或 V 的小区域。 -
切分加载权重:使用
loaded_weight.chunk()将完整的 Q, K, 或 V 权重矩阵沿着并行维度(tp_dim=0,即列)切分成tp_size块,并取出当前 GPU (tp_rank) 应该持有的那一块。 -
拷贝数据:最后,将切分好的权重数据
copy_到上一步定位好的本地参数区域。
-
-
forward方法:-
QKVParallelLinear没有重写forward方法,它直接复用了父类ColumnParallelLinear.forward的实现。 -
这意味着在前向传播时,它将完整的输入
x与其本地持有的、融合了 Q, K, V 的部分权重进行一次标准的线性运算。 -
其输出是一个融合了 Q, K, V 结果的张量,并且这个张量是按列(特征维度)切分的。后续的逻辑需要将这个融合的输出张量再次切分,以分别得到并行的 Q, K, V 张量,用于后续的注意力计算。
-
从代码上面看比较抽象,下面我举个例子解释一下 QKV 在weight_loader 中是怎么从三个矩阵合并成一个矩阵的。
以 GPU0 为例,W_q 是 (4, 2) 的矩阵,切一半 W_q0 放到 Wfused 中。
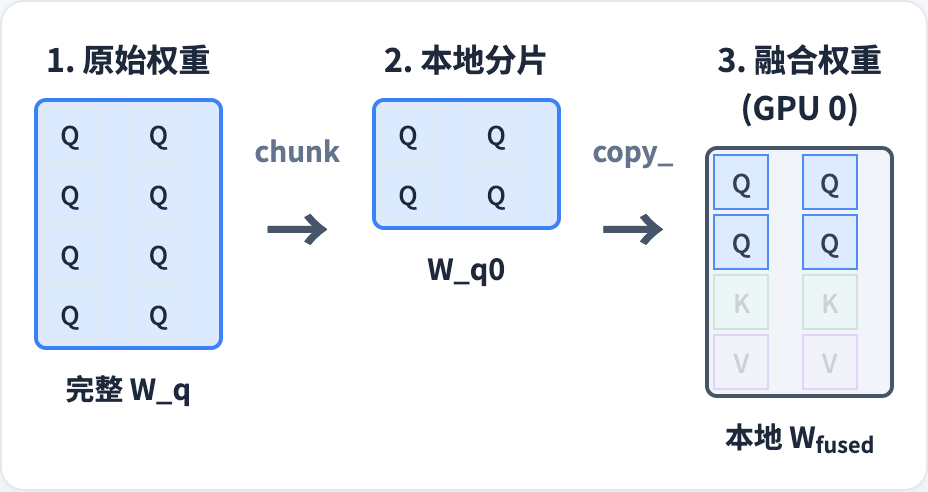
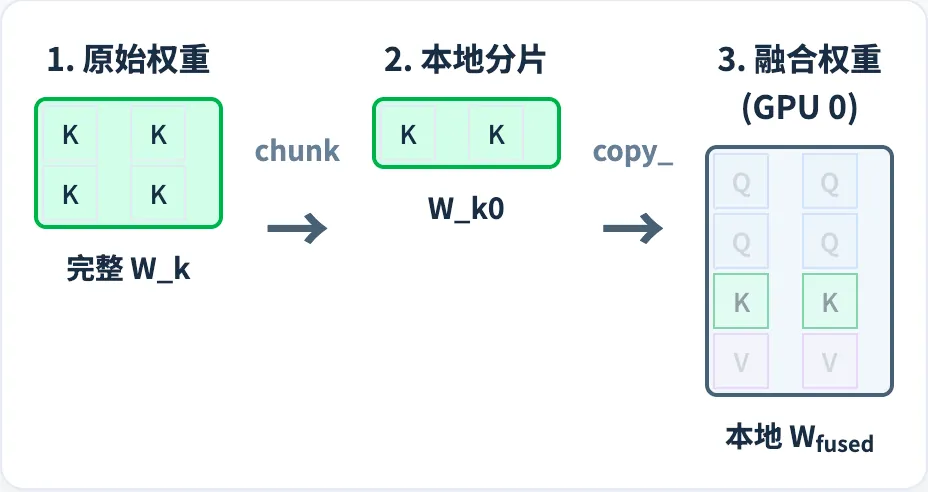
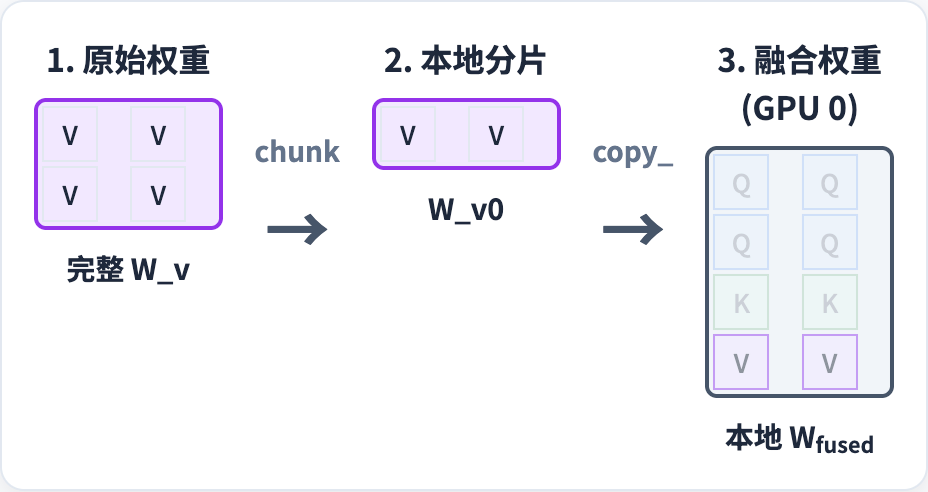
同理,K 和 V 矩阵也是这样进行切分,然后合并到一个矩阵里面。
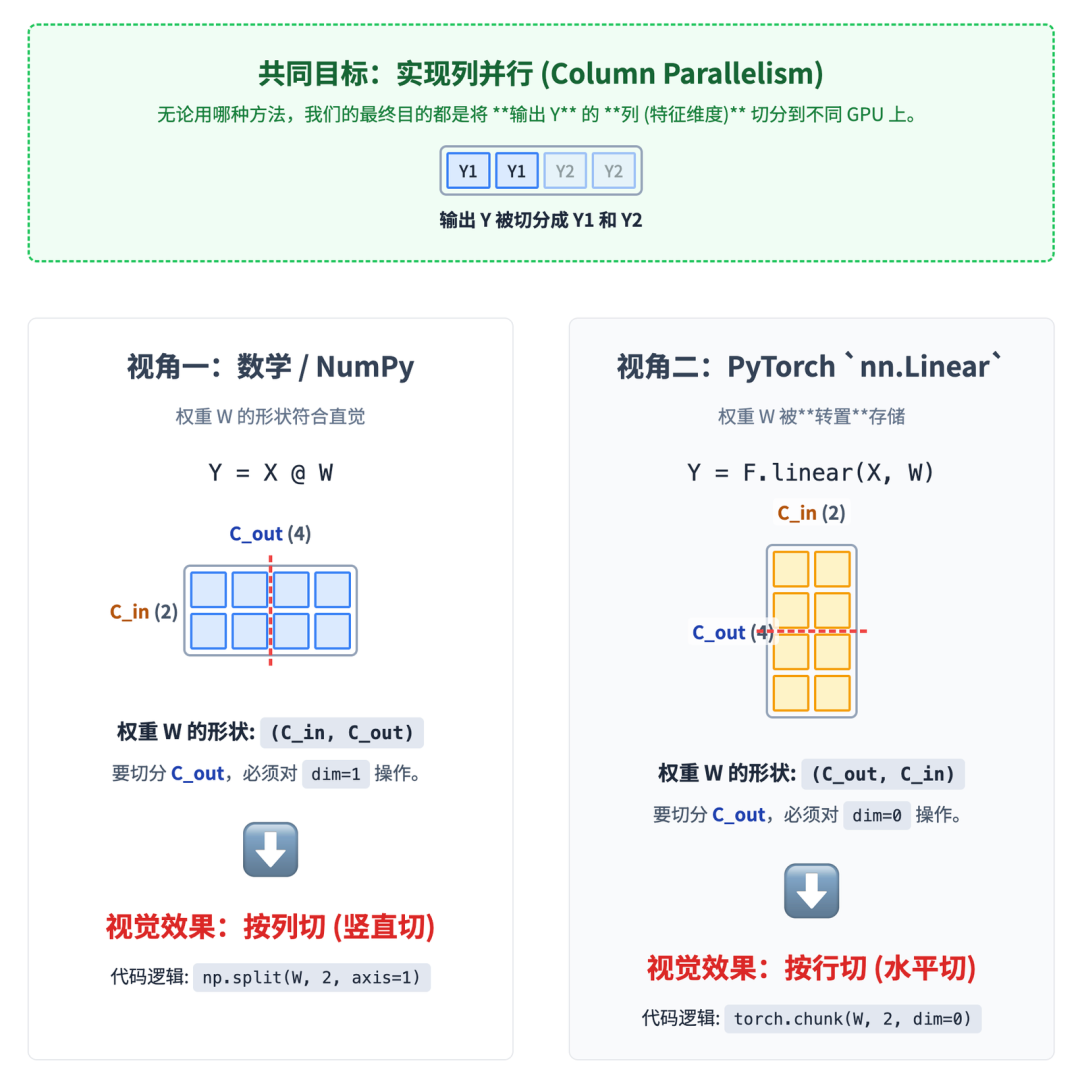
列并行切分的反直觉问题
如果你仔细看会发现,怎么 QKV 的列并行切分在图里面是按照行进行切分的?跟前面的 Numpy 例子对不上呀?好问题,这里面就涉及数学·实现跟 Pytorch 实现的差别了。
在标准的线性代数和 NumPy 中,我们这样表示矩阵乘法:
Y = X @ W
X 的形状是 (..., C_in)
W 的形状是 (C_in, C_out)
Y 的形状是 (..., C_out)
“列并行”的目标是切分输出 Y 的列,也就是它的 C_out 维度。为了实现这一点,我们必须对权重 W 的 C_out 维度进行切分。
由于 W 的形状是 (C_in, C_out),C_out 是它的第 1 维。对第 1 维进行切分,就是垂直方向的“按列切”。
而在 PyTorch 的 nn.Linear(C_in, C_out) 层为了计算效率,存储其权重参数的方式是转置的。
-
实际存储的
weight.shape = (C_out, C_in) -
层定义:
layer = nn.Linear(C_in, C_out) -
权重形状:
layer.weight.shape 是 (C_out, C_in) -
前向传播: 逻辑上等价于
X @ layer.weight.T
“列并行”的目标不变:我们仍然要切分输出 Y 的列,也就是 C_out 维度。
但是,在 PyTorch 存储的这个权重张量里,C_out 维度现在是它的第 0 维。对第 0 维进行切分,就是水平方向的“按行切”。
继续深挖:PyTorch 为什么要转置存储矩阵
PyTorch nn.Linear 层以转置的方式存储权重(即形状为 (C_out, C_in)),主要是为了最大化计算性能,这与现代计算机硬件(尤其是 GPU)的内存访问模式密切相关。
核心原因可以归结为一点:内存访问的连续性。
让我们来详细解释一下:
硬件工作原理:
-
无论是 CPU 还是 GPU,从主内存中读取数据都不是一个一个字节地读取,而是一次性读取一个连续的内存块(Chunk)。
-
对于 GPU 来说,这种特性更为重要。当多个计算核心(线程)需要访问内存时,如果它们访问的地址是连续的,GPU 就可以将这些访问合并成一次或几次大的读取操作。这个过程就叫做“合并内存访问” (Memory Coalescing)。
-
合并访问的效率极高,而非连续的、跳跃式的(Strided)内存访问效率则会低很多,因为需要进行多次独立的内存读取操作。
矩阵乘法中的内存访问:
-
我们来看计算
Y = X @ W.T的过程(这是F.linear的逻辑)。输入X的形状是(batch_size, C_in),权重W的形状是(C_out, C_in)。 -
为了计算输出
Y的第一个元素Y[0, 0],我们需要用X的第一行和W的第一行做点积。 -
为了计算
Y[0, 1],我们需要用X的第一行和W的第二行做点积。 -
...以此类推。
转置存储的优势:
-
当权重
W以(C_out, C_in)的形状存储时,它的每一行在内存中是连续存放的。 -
在计算过程中,当我们要用
X的某一行去和W的所有行分别做点积时,GPU 可以非常高效地、连续地读取W的数据。W的第一行读完,紧接着就是第二行的数据,内存访问是连续的、合并的。
不转置存储的劣势:
-
如果权重
W以(C_in, C_out)的形状存储,那么它的每一列在内存中是连续的,而每一行的数据则是跳跃式存储的。 -
在计算
Y = X @ W时,为了计算Y的一行,你需要用X的一行去和W的每一列做点积。 -
这意味着你需要跳跃式地访问
W的内存(访问第一列的第一个元素,然后跳到第二列的第一个元素,再跳到第三列...),这无法形成合并访问,效率会大大降低。
总之,PyTorch 将 nn.Linear 的权重设计为 (C_out, C_in) 的转置形式,是为了让矩阵乘法在底层硬件上执行时,对权重矩阵的内存访问模式是最高效的连续读取模式**。这是深度学习框架在设计时,为了压榨出极致的硬件性能而做出的一个关键优化。

理解张量并行的input_size和output_size
我们在理解张量并行的时候需要时刻记住:
-
列并行:
output_size被分割,每个GPU处理部分输出维度 -
行并行:
input_size被分割,每个GPU处理部分输入维度
那么在大模型中,input_size 和 output_size 到底代表了什么?其实这两个变量在不同组件中有不同的含义。
词嵌入层 (Word Embedding)
-
input_size: 词汇表大小 (vocab_size) -
output_size: 隐藏层维度 (hidden_size) -
例如:32000 → 4096
注意力机制中的线性层
-
QKV投影:
-
input_size: hidden_size -
output_size: num_heads × head_dim × 3 (Q、K、V三个矩阵,标准 MHA)
-
-
输出投影:
-
input_size: num_heads × head_dim -
output_size: hidden_size
-
前馈网络 (FFN)
-
第一层 (上投影):
-
input_size: hidden_size -
output_size: intermediate_size (通常是hidden_size的3-4倍)
-
-
第二层 (下投影):
-
input_size: intermediate_size -
output_size: hidden_size
-
输出层 (Language Modeling Head)
-
input_size: hidden_size -
output_size: vocab_size
具体例子
以 Qwen3 0.6B 为例:
hidden_size = 1024
intermediate_size = 3072
num_heads = 16
num_kv_heads = 8
head_dim = 128
vocab_size = 151936线性层尺寸:
- 词嵌入: 151936 → 1024
- QKV投影: 1024 → 4096 (1024 → (16+8+8)×128)(GQA)
- 注意力输出: 2048 → 1024
- FFN第一层: 1024 → 3072
- FFN第二层: 3072 → 1024
- 输出层: 1024 → 151936
张量并行是对矩阵计算进行加速的技术,它是功能无关的,在理解它的时候要结合所在的组件的input_size和output_size 含义去分析,不然可能会被绕晕了。
总结
在这篇文章中,我们详细探讨了如何在大模型推理引擎中实现张量并行。张量并行是将大模型的计算任务分解到多个GPU上,以解决单个GPU显存不足的问题,并提升计算速度。通过Qwen3Attention模块中的QKVParallelLinear和RowParallelLinear两个核心组件,展示了张量并行的实现。
-
列并行(Column Parallelism):通过将权重矩阵按列切分,每个GPU处理部分输出维度。
QKVParallelLinear通过一次性计算Q, K, V来优化注意力机制,并将其结果切分到各个GPU上。 -
行并行(Row Parallelism):通过将权重矩阵按行切分,每个GPU处理部分输入维度。
RowParallelLinear接收列并行的输出,并在各个GPU上分别计算,最后通过All-Reduce操作聚合结果。
我们还解释了张量并行的数学原理和PyTorch实现中的内存优化策略,特别是如何通过转置存储权重来提高计算效率。
在理解了张量并行的基础模块(QKVParallelLinear和RowParallelLinear)之后,我们下一篇文章将聚焦于Qwen3Attention模块的核心——Attention机制本身。我们将探讨如何运用这些并行化后的Q, K, V张量来执行注意力计算,并深入分析RotaryEmbedding(旋转位置编码)如何融入其中。最终,看清所有组件是如何协同工作,完成一个完整且高效的并行化Attention操作。
关于我们
看到这里,相信你对本文核心主题已经有了更深入的理解。但 AI 和大模型领域更新迭代极快,单篇文章的内容很难覆盖所有细节,只能算是入门铺垫。
我平时会在【小灰熊大模型】这个公・Z・号里,系统整理 AI 大模型相关的实用资料,比如最新模型技术白皮书、实战调参手册、行业落地案例合集,还会每周更新 AI 前沿动态速递。
里面沉淀的干货具体包括:
- 大模型入门学习路线图,帮新手少走弯路
- 大模型方向必读书籍 PDF 版,方便随时查阅
- 大模型面试题库,覆盖常见考点和高频问题
- 大模型项目源码,可直接参考实操
- 超详细海量大模型 LLM 实战项目,从 0 到 1 带练
- Langchain/RAG/Agent 学习教程,聚焦热门技术方向
- LLM 大模型系统 0 到 1 入门学习教程,适合零基础
- 吴恩达最新大模型视频 + 课件,同步前沿课程内容
一直以来,我都在专注分享 AI 与大模型领域的干货 —— 从基础原理拆解到进阶实战教程,从开源工具测评到商业落地思考,每一篇内容都尽量打磨得细致实用,希望能帮大家快速跟上技术浪潮。
如果需要上述资料,关注后在GZH后台回复关键词【大模型福利】就能获取,后续也会持续更新更多针对性资源,一起在 AI 领域慢慢深耕成长~