DINOv2分类网络onnxruntime和tensorrt部署
下载源代码:https://github.com/facebookresearch/dinov2
onnxruntime部署
pytorch推理和onnx模型导出:
from PIL import Image
import torch
from torchvision.transforms import v2def make_transform(resize_size: int | list[int] = 768):to_tensor = v2.ToImage()resize = v2.Resize((resize_size, resize_size), antialias=True)to_float = v2.ToDtype(torch.float32, scale=True)normalize = v2.Normalize(mean=(0.485, 0.456, 0.406),std=(0.229, 0.224, 0.225),)return v2.Compose([to_tensor, resize, to_float, normalize])dinov2_vits14 = torch.hub.load('./dinov2-main', 'dinov2_vits14_lc', source="local")
transform = make_transform(resize_size=700)
img = Image.open('bus.jpg')
batch_img = transform(img)[None]
output = dinov2_vits14(batch_img)
print(torch.argmax(output.squeeze(0)))
torch.onnx.export(dinov2_vits14, batch_img, "dinov2_vits14.onnx", opset_version=15)
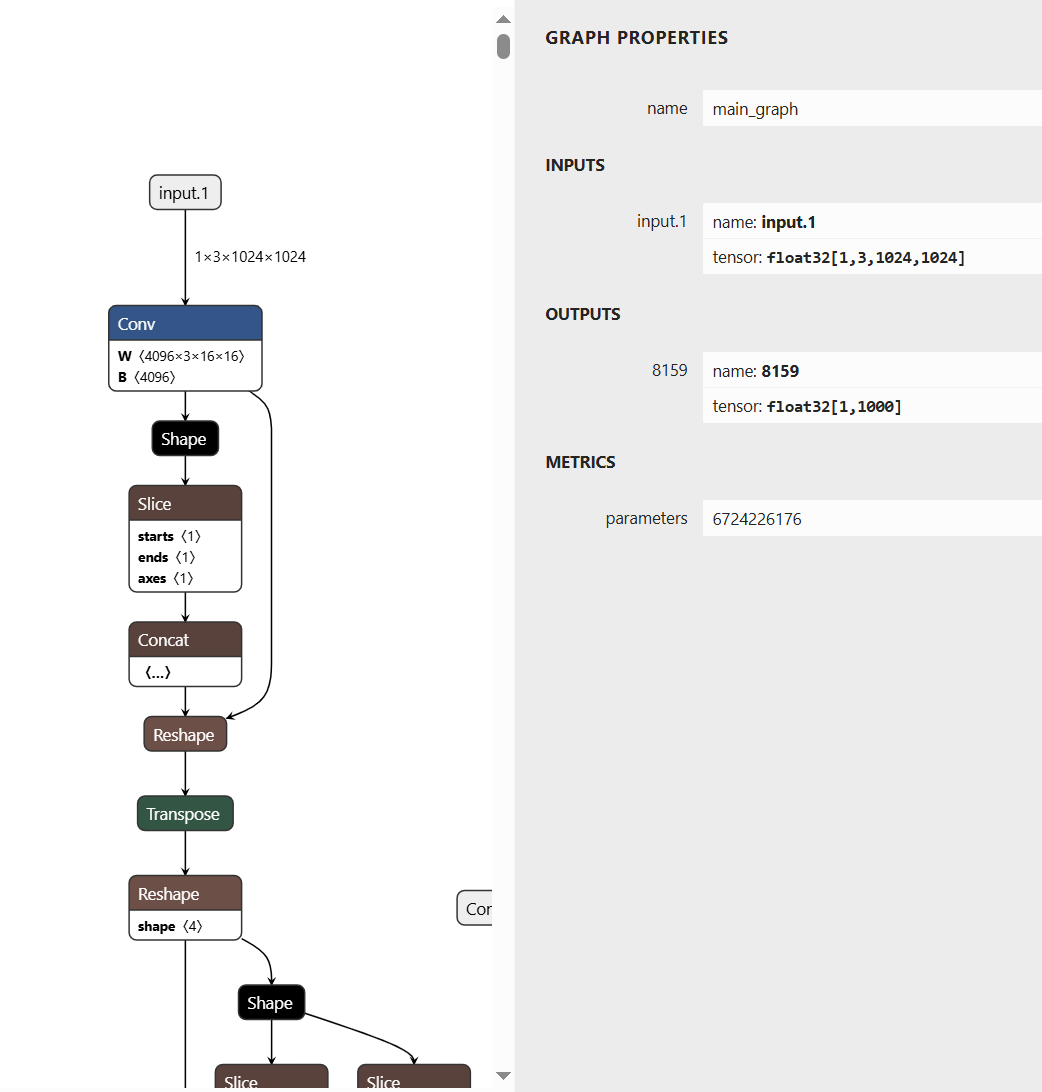
onnx模型结构如下:
onnxruntime推理脚本:
import cv2
import numpy as np
import onnxruntimeonnx_session = onnxruntime.InferenceSession("dinov2_vits14.onnx", providers=[ 'CPUExecutionProvider'])
img = cv2.imread('bus.jpg')
img_resized = cv2.resize(img, (700, 700), interpolation=cv2.INTER_LINEAR)
img_float = img_resized.astype(np.float32) / 255.0
mean = np.array([0.485, 0.456, 0.406], dtype=np.float32)
std = np.array([0.229, 0.224, 0.225], dtype=np.float32)
img_normalized = (img_float - mean) / stdinputs = {}
inputs['x.1'] = img_normalized.transpose(2, 0, 1)[np.newaxis, :]
outputs = onnx_session.run(None, inputs)
print(np.argmax(outputs[0].squeeze(0)))
tensorrt部署
import cv2
import numpy as np
import tensorrt as trt
import commonimg = cv2.imread('bus.jpg')
img_resized = cv2.resize(img, (700, 700), interpolation=cv2.INTER_LINEAR)
img_float = img_resized.astype(np.float32) / 255.0
mean = np.array([0.485, 0.456, 0.406], dtype=np.float32)
std = np.array([0.229, 0.224, 0.225], dtype=np.float32)
img_normalized = (img_float - mean) / std
img_normalized = img_normalized.transpose(2, 0, 1)logger = trt.Logger(trt.Logger.WARNING)
trt.init_libnvinfer_plugins(logger, "")
with open("dinov2_vits14.engine", "rb") as f, trt.Runtime(logger) as runtime:engine = runtime.deserialize_cuda_engine(f.read())
context = engine.create_execution_context()
inputs, outputs, bindings, stream = common.allocate_buffers(engine)np.copyto(inputs[0].host, img_normalized.ravel())
output = common.do_inference(context,engine=engine, bindings=bindings, inputs=inputs, outputs=outputs, stream=stream)
print(np.argmax(output[0]))
common.py
#
# SPDX-FileCopyrightText: Copyright (c) 1993-2023 NVIDIA CORPORATION & AFFILIATES. All rights reserved.
# SPDX-License-Identifier: Apache-2.0
#
# Licensed under the Apache License, Version 2.0 (the "License");
# you may not use this file except in compliance with the License.
# You may obtain a copy of the License at
#
# http://www.apache.org/licenses/LICENSE-2.0
#
# Unless required by applicable law or agreed to in writing, software
# distributed under the License is distributed on an "AS IS" BASIS,
# WITHOUT WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
# See the License for the specific language governing permissions and
# limitations under the License.
#import argparse
import os
import ctypes
from typing import Optional, Listimport numpy as np
import tensorrt as trt
from cuda import cuda, cudarttry:# Sometimes python does not understand FileNotFoundErrorFileNotFoundError
except NameError:FileNotFoundError = IOErrorEXPLICIT_BATCH = 1 << (int)(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH)def check_cuda_err(err):if isinstance(err, cuda.CUresult):if err != cuda.CUresult.CUDA_SUCCESS:raise RuntimeError("Cuda Error: {}".format(err))if isinstance(err, cudart.cudaError_t):if err != cudart.cudaError_t.cudaSuccess:raise RuntimeError("Cuda Runtime Error: {}".format(err))else:raise RuntimeError("Unknown error type: {}".format(err))def cuda_call(call):err, res = call[0], call[1:]check_cuda_err(err)if len(res) == 1:res = res[0]return resdef GiB(val):return val * 1 << 30def add_help(description):parser = argparse.ArgumentParser(description=description, formatter_class=argparse.ArgumentDefaultsHelpFormatter)args, _ = parser.parse_known_args()def find_sample_data(description="Runs a TensorRT Python sample", subfolder="", find_files=[], err_msg=""):"""Parses sample arguments.Args:description (str): Description of the sample.subfolder (str): The subfolder containing data relevant to this samplefind_files (str): A list of filenames to find. Each filename will be replaced with an absolute path.Returns:str: Path of data directory."""# Standard command-line arguments for all samples.kDEFAULT_DATA_ROOT = os.path.join(os.sep, "usr", "src", "tensorrt", "data")parser = argparse.ArgumentParser(description=description, formatter_class=argparse.ArgumentDefaultsHelpFormatter)parser.add_argument("-d","--datadir",help="Location of the TensorRT sample data directory, and any additional data directories.",action="append",default=[kDEFAULT_DATA_ROOT],)args, _ = parser.parse_known_args()def get_data_path(data_dir):# If the subfolder exists, append it to the path, otherwise use the provided path as-is.data_path = os.path.join(data_dir, subfolder)if not os.path.exists(data_path):if data_dir != kDEFAULT_DATA_ROOT:print("WARNING: " + data_path + " does not exist. Trying " + data_dir + " instead.")data_path = data_dir# Make sure data directory exists.if not (os.path.exists(data_path)) and data_dir != kDEFAULT_DATA_ROOT:print("WARNING: {:} does not exist. Please provide the correct data path with the -d option.".format(data_path))return data_pathdata_paths = [get_data_path(data_dir) for data_dir in args.datadir]return data_paths, locate_files(data_paths, find_files, err_msg)def locate_files(data_paths, filenames, err_msg=""):"""Locates the specified files in the specified data directories.If a file exists in multiple data directories, the first directory is used.Args:data_paths (List[str]): The data directories.filename (List[str]): The names of the files to find.Returns:List[str]: The absolute paths of the files.Raises:FileNotFoundError if a file could not be located."""found_files = [None] * len(filenames)for data_path in data_paths:# Find all requested files.for index, (found, filename) in enumerate(zip(found_files, filenames)):if not found:file_path = os.path.abspath(os.path.join(data_path, filename))if os.path.exists(file_path):found_files[index] = file_path# Check that all files were foundfor f, filename in zip(found_files, filenames):if not f or not os.path.exists(f):raise FileNotFoundError("Could not find {:}. Searched in data paths: {:}\n{:}".format(filename, data_paths, err_msg))return found_filesclass HostDeviceMem:"""Pair of host and device memory, where the host memory is wrapped in a numpy array"""def __init__(self, size: int, dtype: np.dtype):nbytes = size * dtype.itemsizehost_mem = cuda_call(cudart.cudaMallocHost(nbytes))pointer_type = ctypes.POINTER(np.ctypeslib.as_ctypes_type(dtype))self._host = np.ctypeslib.as_array(ctypes.cast(host_mem, pointer_type), (size,))self._device = cuda_call(cudart.cudaMalloc(nbytes))self._nbytes = nbytes@propertydef host(self) -> np.ndarray:return self._host@host.setterdef host(self, arr: np.ndarray):if arr.size > self.host.size:raise ValueError(f"Tried to fit an array of size {arr.size} into host memory of size {self.host.size}")np.copyto(self.host[:arr.size], arr.flat, casting='safe')@propertydef device(self) -> int:return self._device@propertydef nbytes(self) -> int:return self._nbytesdef __str__(self):return f"Host:\n{self.host}\nDevice:\n{self.device}\nSize:\n{self.nbytes}\n"def __repr__(self):return self.__str__()def free(self):cuda_call(cudart.cudaFree(self.device))cuda_call(cudart.cudaFreeHost(self.host.ctypes.data))# Allocates all buffers required for an engine, i.e. host/device inputs/outputs.
# If engine uses dynamic shapes, specify a profile to find the maximum input & output size.
def allocate_buffers(engine: trt.ICudaEngine, profile_idx: Optional[int] = None):inputs = []outputs = []bindings = []stream = cuda_call(cudart.cudaStreamCreate())tensor_names = [engine.get_tensor_name(i) for i in range(engine.num_io_tensors)]for binding in tensor_names:# get_tensor_profile_shape returns (min_shape, optimal_shape, max_shape)# Pick out the max shape to allocate enough memory for the binding.shape = engine.get_tensor_shape(binding) if profile_idx is None else engine.get_tensor_profile_shape(binding, profile_idx)[-1]shape_valid = np.all([s >= 0 for s in shape])if not shape_valid and profile_idx is None:raise ValueError(f"Binding {binding} has dynamic shape, " +\"but no profile was specified.")size = trt.volume(shape)if engine.has_implicit_batch_dimension:size *= engine.max_batch_sizedtype = np.dtype(trt.nptype(engine.get_tensor_dtype(binding)))# Allocate host and device buffersbindingMemory = HostDeviceMem(size, dtype)# Append the device buffer to device bindings.bindings.append(int(bindingMemory.device))# Append to the appropriate list.if engine.get_tensor_mode(binding) == trt.TensorIOMode.INPUT:inputs.append(bindingMemory)else:outputs.append(bindingMemory)return inputs, outputs, bindings, stream# Frees the resources allocated in allocate_buffers
def free_buffers(inputs: List[HostDeviceMem], outputs: List[HostDeviceMem], stream: cudart.cudaStream_t):for mem in inputs + outputs:mem.free()cuda_call(cudart.cudaStreamDestroy(stream))# Wrapper for cudaMemcpy which infers copy size and does error checking
def memcpy_host_to_device(device_ptr: int, host_arr: np.ndarray):nbytes = host_arr.size * host_arr.itemsizecuda_call(cudart.cudaMemcpy(device_ptr, host_arr, nbytes, cudart.cudaMemcpyKind.cudaMemcpyHostToDevice))# Wrapper for cudaMemcpy which infers copy size and does error checking
def memcpy_device_to_host(host_arr: np.ndarray, device_ptr: int):nbytes = host_arr.size * host_arr.itemsizecuda_call(cudart.cudaMemcpy(host_arr, device_ptr, nbytes, cudart.cudaMemcpyKind.cudaMemcpyDeviceToHost))def _do_inference_base(inputs, outputs, stream, execute_async):# Transfer input data to the GPU.kind = cudart.cudaMemcpyKind.cudaMemcpyHostToDevice[cuda_call(cudart.cudaMemcpyAsync(inp.device, inp.host, inp.nbytes, kind, stream)) for inp in inputs]# Run inference.execute_async()# Transfer predictions back from the GPU.kind = cudart.cudaMemcpyKind.cudaMemcpyDeviceToHost[cuda_call(cudart.cudaMemcpyAsync(out.host, out.device, out.nbytes, kind, stream)) for out in outputs]# Synchronize the streamcuda_call(cudart.cudaStreamSynchronize(stream))# Return only the host outputs.return [out.host for out in outputs]def do_inference(context, engine, bindings, inputs, outputs, stream):def execute_async_func():context.execute_async_v3(stream_handle=stream)# Setup context tensor address.num_io = engine.num_io_tensorsfor i in range(num_io):context.set_tensor_address(engine.get_tensor_name(i), bindings[i])return _do_inference_base(inputs, outputs, stream, execute_async_func)