STM32配置读取激光测距传感器VL6180X距离数据
STM32配置读取激光测距传感器VL6180X距离数据
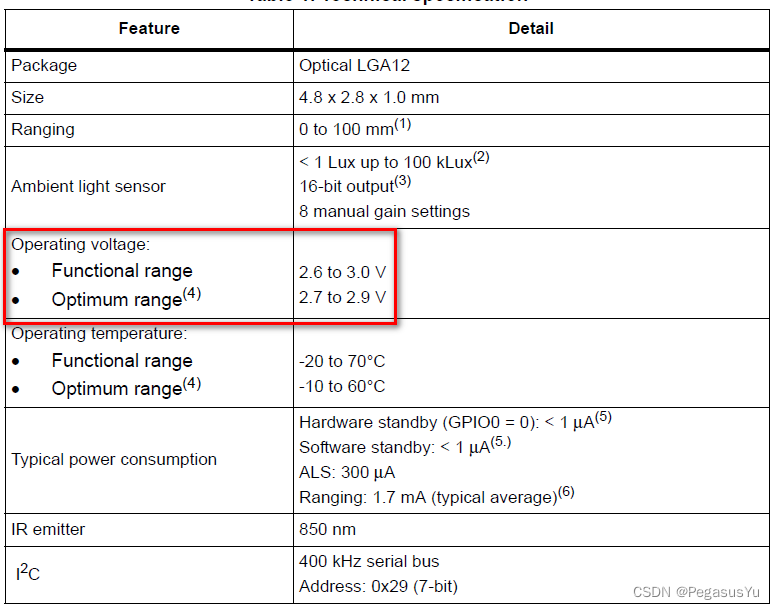
VL6180X是ST公司出品的一款近距离激光测距传感器,VL6180X采用850nm垂直腔面发射激光器(Vertical-Cavity Surface-Emitting Laser,简称VCSEL)发射出激光,激光碰到障碍物后反射回来被VL6180X接收到,测量激光在空气中的传播时间,进而得到距离。
VL6180X的比较准确测试范围为0mm~100mm。可以和VL53L0X互补实现近远距离覆盖的测试。市面上已有模块:

里介绍通过STM32芯片进行连接和测距数据读取的实现。
电路连接
STM32采用Open-drain方式和VL6180X的连接如下所示,注意VL6180X本身是2.8V供电要求的芯片:
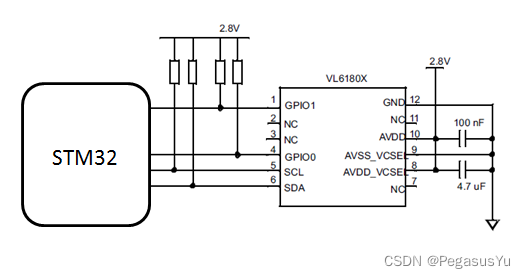
除了用于I2C通讯的SCL, SDA外,主要有GPIO0和GPIO1两个管脚,GPIO0用做芯片使能,高电平有效,GPIO1目前是作为中断输出给STM32, 作为距离测试结果可读取的指示,另外,如果不用GPIO1,则可以直接通过I2C总线读取内部寄存器信息,获得一致的指示信息。
操作模式
VL6180X有作为环境光检测传感器和接近检测传感器两种功能。在配置好I2C管脚和握手协议函数后,要进行一些内部寄存器初始化,ST提供了初始化参考代码。
这里以STM32G030F6P6(32K Flash)和STM32CUBEIDE开发环境为例,实现VL6180X的访问控制,采用非中断判断数据可读方式,通过寄存器读取数据有效状态。
STM32CUBEIDE工程配置
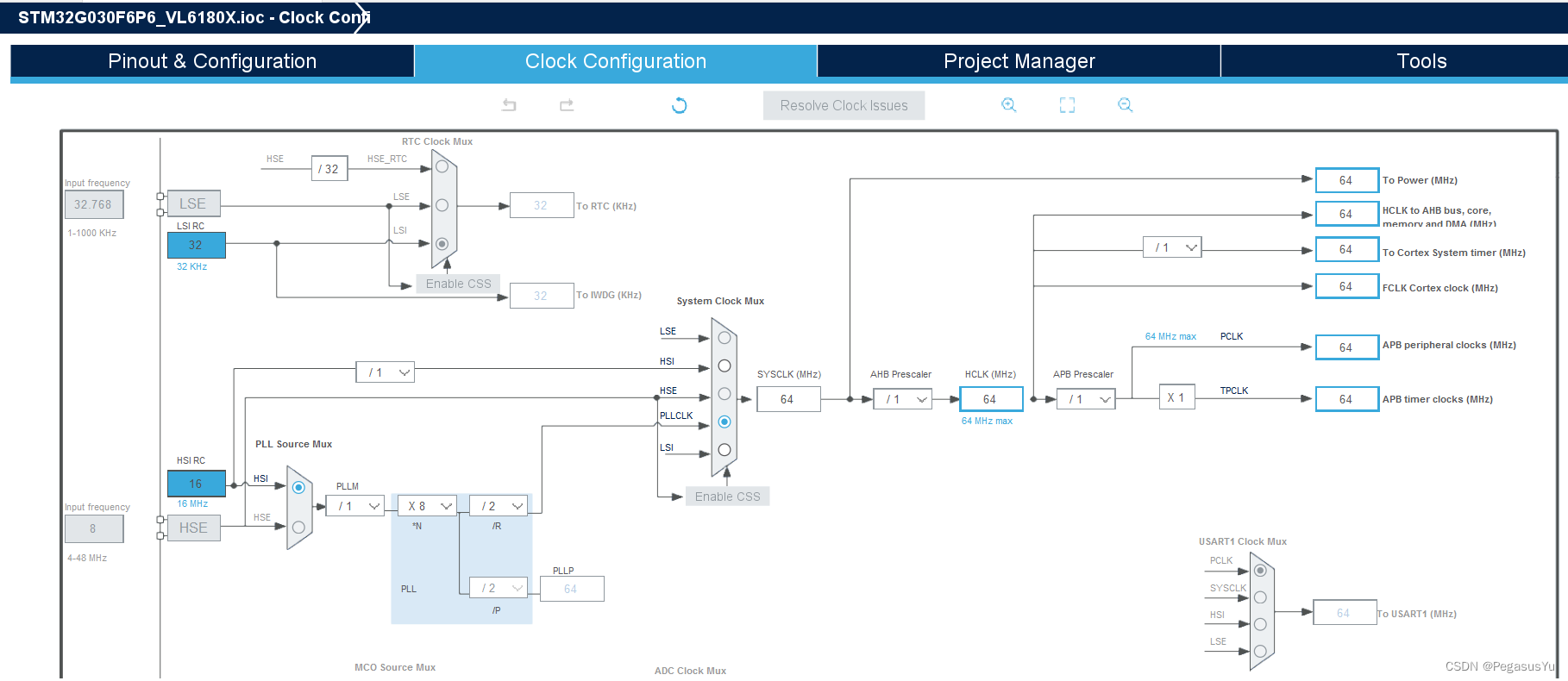
首先建立基本工程并配置时钟系统:
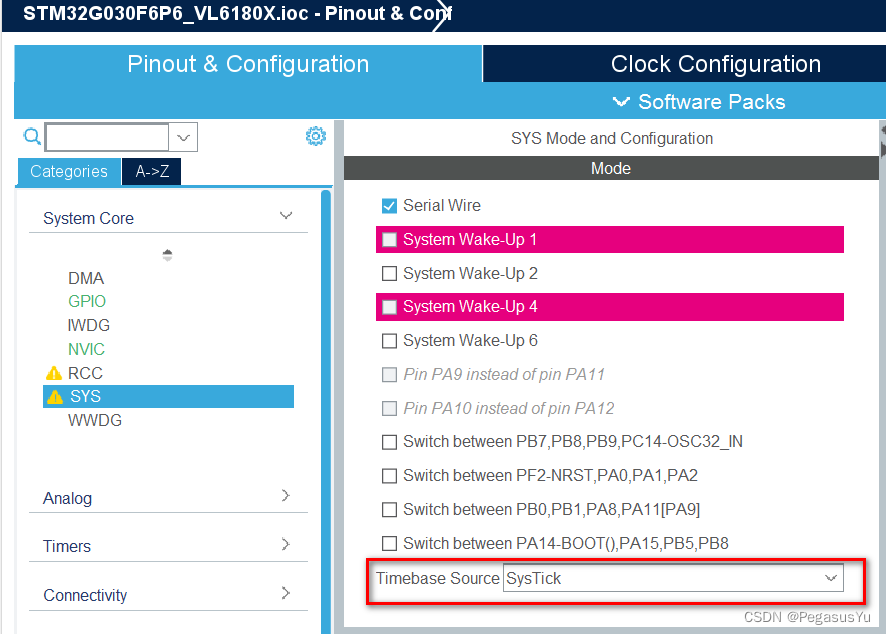
普通UART和模拟I2C, 采用内部时钟即可:
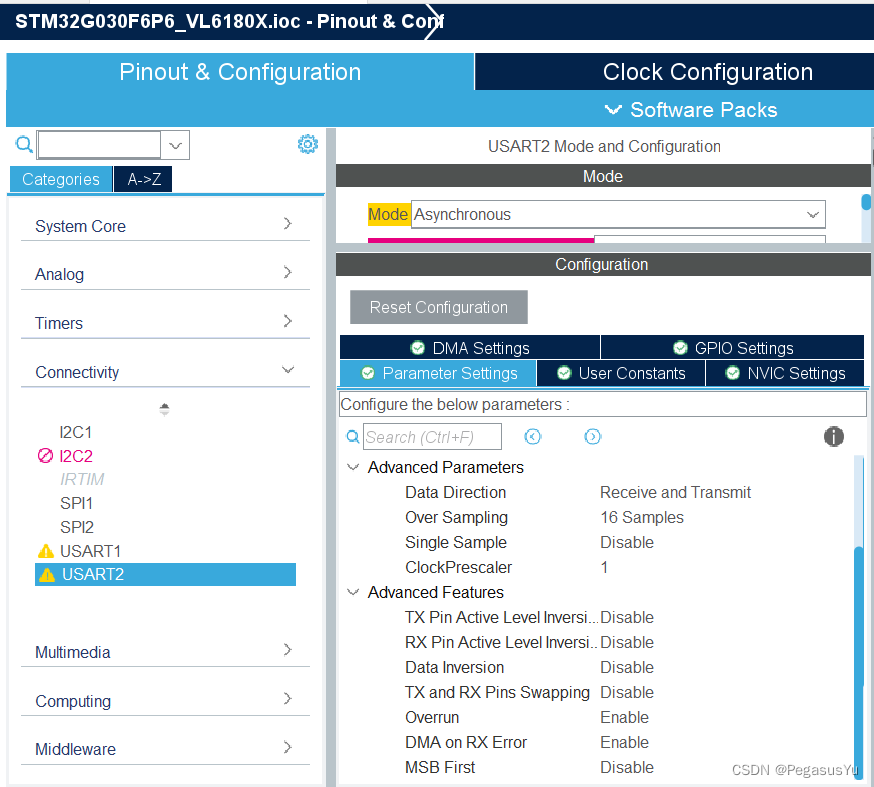
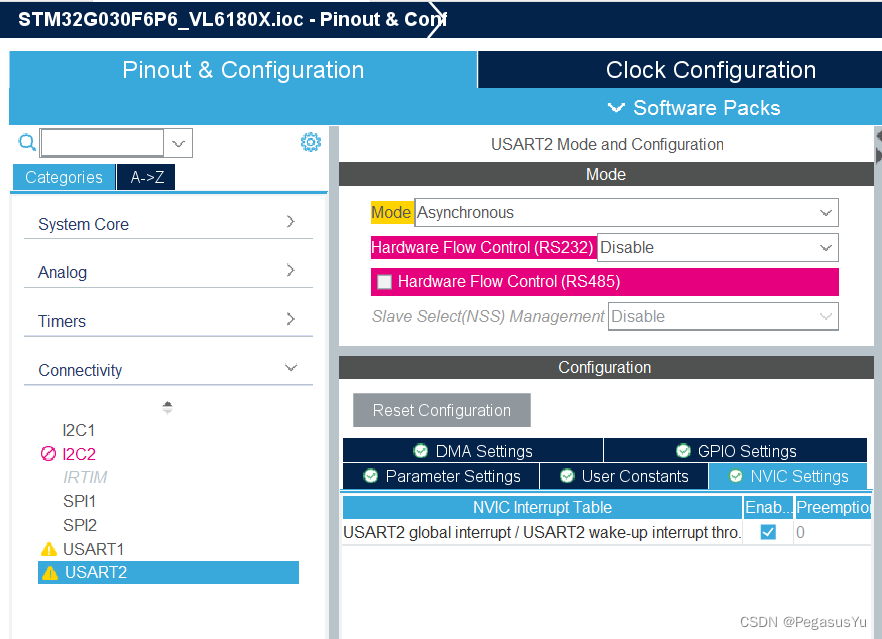
然后例化UART2作为通讯口:
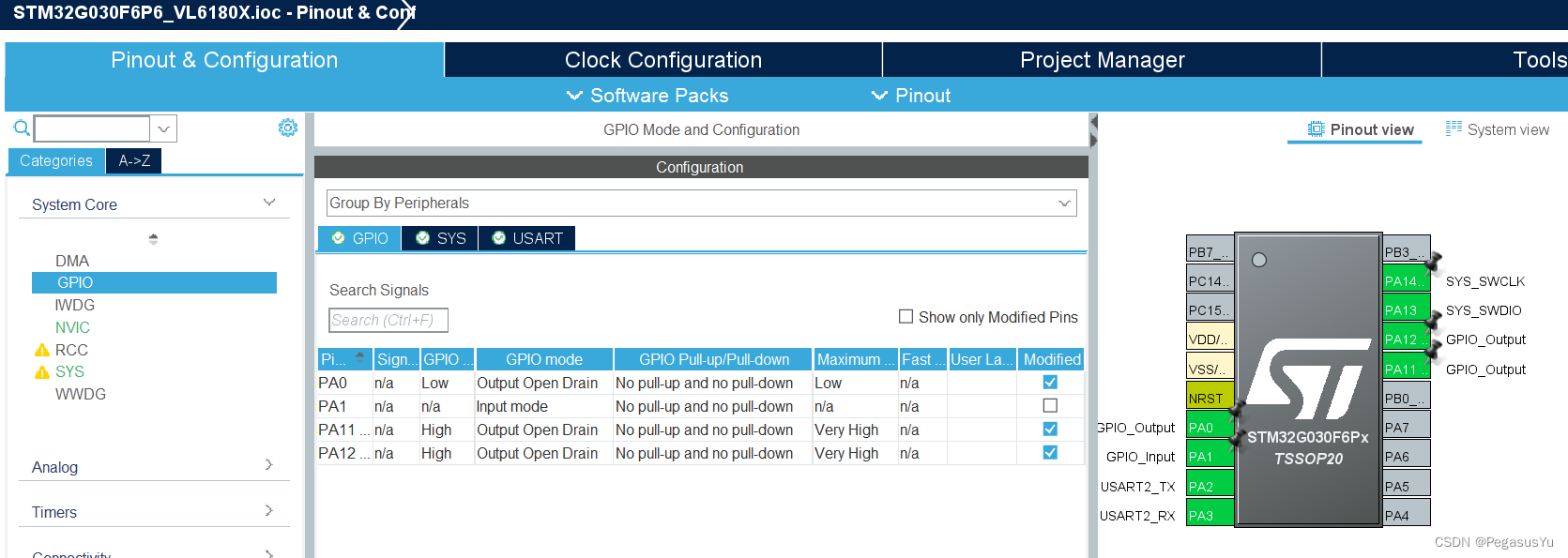
这里选择PA0输出片选低有效给VL6180X的GPIO0, VL6180X的GPIO1连接到STM32的PA1管脚(但不用)。PA11作为SLK, PA12作为SDA:
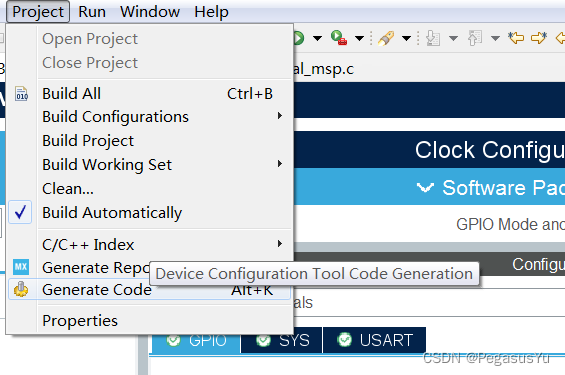
然后保存代码并生成基本工程代码:
STM32工程代码
I2C模拟时序用到的微秒延时函数,参考: STM32 HAL us delay(微秒延时)的指令延时实现方式及优化
STM32串口打印的实现,参考: STM32 UART串口printf函数应用及浮点打印代码空间节省 (HAL)
采用减少代码编译size的方式,参考: STM32 region `FLASH‘ overflowed by xxx bytes 问题解决
代码逻辑采用简化实现,上电或重启后,STM32对VL6180X进行初始化,如果失败,则打印输出报错信息,如果成功,则循环进行距离检测和打印输出。
完整的main.c代码:
/* USER CODE BEGIN Header */
/********************************************************************************* @file : main.c* @brief : Main program body******************************************************************************* @attention** Copyright (c) 2022 STMicroelectronics.* All rights reserved.** This software is licensed under terms that can be found in the LICENSE file* in the root directory of this software component.* If no LICENSE file comes with this software, it is provided AS-IS.********************************************************************************/
/* USER CODE END Header */
/* Includes ------------------------------------------------------------------*/
#include "main.h"/* Private includes ----------------------------------------------------------*/
/* USER CODE BEGIN Includes */
#include "usart.h"
/* USER CODE END Includes *//* Private typedef -----------------------------------------------------------*/
/* USER CODE BEGIN PTD */
//us delay functions
__IO float usDelayBase;
void PY_usDelayTest(void)
{__IO uint32_t firstms, secondms;__IO uint32_t counter = 0;firstms = HAL_GetTick()+1;secondms = firstms+1;while(uwTick!=firstms) ;while(uwTick!=secondms) counter++;usDelayBase = ((float)counter)/1000;
}void PY_Delay_us_t(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t usNum = (uint32_t)(Delay*usDelayBase);delayReg = 0;while(delayReg!=usNum) delayReg++;
}void PY_usDelayOptimize(void)
{__IO uint32_t firstms, secondms;__IO float coe = 1.0;firstms = HAL_GetTick();PY_Delay_us_t(1000000) ;secondms = HAL_GetTick();coe = ((float)1000)/(secondms-firstms);usDelayBase = coe*usDelayBase;
}void PY_Delay_us(uint32_t Delay)
{__IO uint32_t delayReg;__IO uint32_t msNum = Delay/1000;__IO uint32_t usNum = (uint32_t)((Delay%1000)*usDelayBase);if(msNum>0) HAL_Delay(msNum);delayReg = 0;while(delayReg!=usNum) delayReg++;
}
/* USER CODE END PTD *//* Private define ------------------------------------------------------------*/
/* USER CODE BEGIN PD */
//VL6180X I2C access protocol
#define us_num 10#define SCL_OUT_H HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_SET)
#define SCL_OUT_L HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11, GPIO_PIN_RESET)
#define SDA_OUT_H HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_SET)
#define SDA_OUT_L HAL_GPIO_WritePin(GPIOA, GPIO_PIN_12, GPIO_PIN_RESET)
#define SDA_IN HAL_GPIO_ReadPin(GPIOA, GPIO_PIN_12)/** The VL6180X device can operate in 2 different modes:* Single-shot measurement or Continuous measurement for both ranging and ALS.* The Vl6180X API enables 3 different typical operating range modes: Polling, interrupt or asynchronous.* And 3 different ALS modes: Polling, interrupt and interleaved.*/
void I2C_Init(void)
{SCL_OUT_H;SDA_OUT_H;PY_Delay_us_t(400) ; //400 us delayPY_Delay_us_t(1000000) ; //1ms delay
}void I2C_Start(void)
{PY_Delay_us_t(us_num) ;SDA_OUT_H;SCL_OUT_H;PY_Delay_us_t(us_num/2) ;SDA_OUT_L;PY_Delay_us_t(us_num/2) ;SCL_OUT_L;
}void I2C_Stop(void)
{SCL_OUT_L;PY_Delay_us_t(us_num) ;SDA_OUT_L;PY_Delay_us_t(us_num) ;SCL_OUT_H;PY_Delay_us_t(us_num) ;SDA_OUT_H;PY_Delay_us_t(us_num) ;
}void I2C_Write_Ack(void)
{PY_Delay_us_t(us_num/2) ;SDA_OUT_L;PY_Delay_us_t(us_num/2) ;SCL_OUT_H;PY_Delay_us_t(us_num) ;SCL_OUT_L;SDA_OUT_H;}uint8_t I2C_Read_Ack(void)
{uint8_t status=0;SCL_OUT_L;PY_Delay_us_t(us_num/2) ;SDA_OUT_H;PY_Delay_us_t(us_num/2) ;status = SDA_IN;SCL_OUT_H;PY_Delay_us_t(us_num) ;SCL_OUT_L;SDA_OUT_L;return status;}void I2C_Send_Byte(uint8_t txd){for(uint8_t i=0;i<8;i++){PY_Delay_us_t(us_num/2) ;if((txd&0x80)>>7) SDA_OUT_H;else SDA_OUT_L;txd<<=1;PY_Delay_us_t(us_num/2) ;SCL_OUT_H;PY_Delay_us_t(us_num) ;SCL_OUT_L;}SDA_OUT_L;
}uint8_t I2C_Read_Byte(unsigned char rdack)
{uint8_t rxd=0;for(uint8_t i=0;i<8;i++ ){SCL_OUT_L;PY_Delay_us_t(us_num/2) ;SDA_OUT_H;PY_Delay_us_t(us_num/2) ;SCL_OUT_H;rxd<<=1;if(SDA_IN) rxd++;PY_Delay_us_t(us_num) ;}SCL_OUT_L;SDA_OUT_H;if (rdack) I2C_Write_Ack();return rxd;
}void VL6180X_WRITE_1Byte(uint16_t WrAddr, uint8_t data)
{uint8_t daddr = 0x52; //VL6180X device address (0x29<<1)I2C_Start();I2C_Send_Byte(daddr);I2C_Read_Ack();I2C_Send_Byte(WrAddr>>8);I2C_Read_Ack();I2C_Send_Byte(WrAddr);I2C_Read_Ack();I2C_Send_Byte(data);I2C_Read_Ack();I2C_Stop();
}uint8_t VL6180X_READ_1Byte(uint16_t RdAddr)
{uint8_t RegValue = 0;uint8_t daddr = 0x52; //VL6180X device address (0x29<<1)I2C_Start();I2C_Send_Byte(daddr);I2C_Read_Ack();I2C_Send_Byte(RdAddr>>8);I2C_Read_Ack();I2C_Send_Byte(RdAddr);I2C_Read_Ack();I2C_Start();I2C_Send_Byte(daddr+1);I2C_Read_Ack();RegValue=I2C_Read_Byte(0);I2C_Stop();return RegValue;
}uint16_t VL6180X_READ_2Byte(uint16_t RdAddr)
{uint8_t RegValueH = 0, RegValueL = 0;uint8_t daddr = 0x52; //VL6180X device address (0x29<<1)I2C_Start();I2C_Send_Byte(daddr);I2C_Read_Ack();I2C_Send_Byte(RdAddr>>8);I2C_Read_Ack();I2C_Send_Byte(RdAddr);I2C_Read_Ack();I2C_Start();I2C_Send_Byte(daddr+1);I2C_Read_Ack();RegValueL=I2C_Read_Byte(1);RegValueH=I2C_Read_Byte(0);I2C_Stop();return (((uint16_t)RegValueH)<<8)|RegValueL;
}
/* USER CODE END PD *//* Private macro -------------------------------------------------------------*/
/* USER CODE BEGIN PM */
uint8_t VL6180X_Read_ID(void)
{return VL6180X_READ_1Byte(VL6180X_REG_IDENTIFICATION_MODEL_ID);
}uint8_t VL6180X_Init(void)
{if(VL6180X_Read_ID() == VL6180X_DEFAULT_ID){//coming from <an4545-vl6180x-basic-ranging-application-note-stmicroelectronics>VL6180X_WRITE_1Byte(0x0207, 0x01);VL6180X_WRITE_1Byte(0x0208, 0x01);VL6180X_WRITE_1Byte(0x0096, 0x00);VL6180X_WRITE_1Byte(0x0097, 0xfd);VL6180X_WRITE_1Byte(0x00e3, 0x00);VL6180X_WRITE_1Byte(0x00e4, 0x04);VL6180X_WRITE_1Byte(0x00e5, 0x02);VL6180X_WRITE_1Byte(0x00e6, 0x01);VL6180X_WRITE_1Byte(0x00e7, 0x03);VL6180X_WRITE_1Byte(0x00f5, 0x02);VL6180X_WRITE_1Byte(0x00d9, 0x05);VL6180X_WRITE_1Byte(0x00db, 0xce);VL6180X_WRITE_1Byte(0x00dc, 0x03);VL6180X_WRITE_1Byte(0x00dd, 0xf8);VL6180X_WRITE_1Byte(0x009f, 0x00);VL6180X_WRITE_1Byte(0x00a3, 0x3c);VL6180X_WRITE_1Byte(0x00b7, 0x00);VL6180X_WRITE_1Byte(0x00bb, 0x3c);VL6180X_WRITE_1Byte(0x00b2, 0x09);VL6180X_WRITE_1Byte(0x00ca, 0x09);VL6180X_WRITE_1Byte(0x0198, 0x01);VL6180X_WRITE_1Byte(0x01b0, 0x17);VL6180X_WRITE_1Byte(0x01ad, 0x00);VL6180X_WRITE_1Byte(0x00ff, 0x05);VL6180X_WRITE_1Byte(0x0100, 0x05);VL6180X_WRITE_1Byte(0x0199, 0x05);VL6180X_WRITE_1Byte(0x01a6, 0x1b);VL6180X_WRITE_1Byte(0x01ac, 0x3e);VL6180X_WRITE_1Byte(0x01a7, 0x1f);VL6180X_WRITE_1Byte(0x0030, 0x00);// Recommended : Public registers - See data sheet for more detailVL6180X_WRITE_1Byte(0x0011, 0x10); // Enables polling for 'New Sample ready' when measurement completesVL6180X_WRITE_1Byte(0x010a, 0x30); // Set the averaging sample period (compromise between lower noise and increased execution time)// Adjusted from 0 to 255. Increasing the sampling period decreases noise but also reduces the effective max convergence time and increases power consumptionVL6180X_WRITE_1Byte(0x003f, 0x46); // Sets the light and dark gain (upper nibble). Dark gain should not be changed. So to keep high half-byte as 0x4*.// It's for ALS analogue gain.VL6180X_WRITE_1Byte(0x0031, 0xFF); // sets the # of range measurements after which auto calibration of system is performedVL6180X_WRITE_1Byte(0x0040, 0x63); // Set ALS integration time to 100msVL6180X_WRITE_1Byte(0x002e, 0x01); // perform a single temperature calibration of the ranging sensor// Optional: Public registers - See data sheet for more detailVL6180X_WRITE_1Byte(0x001b, 0x09); //Set default ranging inter-measurement period to 100ms. Time delay between measurements in Ranging continuous mode. Range 0-254 (0 = 10ms). Step size = 10ms.VL6180X_WRITE_1Byte(0x003e, 0x31); //Set default ALS inter-measurement period to 500ms. Time delay between measurements in ALS continuous mode. Range 0-254 (0 = 10ms). Step size = 10ms.VL6180X_WRITE_1Byte(0x0014, 0x24); //Configures interrupt on 'New Sample Ready threshold event'return 0;}else return 1;
}//unit: mm
uint8_t VL6180X_Read_Range(void)
{uint8_t range = 0;//Read statuswhile(!(VL6180X_READ_1Byte(VL6180X_REG_RESULT_RANGE_STATUS) & 0x01));VL6180X_WRITE_1Byte(VL6180X_REG_SYSRANGE_START,0x01); //Single trigger mode//New Sample Ready threshold event)while(!(VL6180X_READ_1Byte(VL6180X_REG_RESULT_INTERRUPT_STATUS_GPIO) & 0x04));range = VL6180X_READ_1Byte(VL6180X_REG_RESULT_RANGE_VAL);//Clear intVL6180X_WRITE_1Byte(VL6180X_REG_SYSTEM_INTERRUPT_CLEAR,0x07); //0111b clear int flagsreturn range;
}//Read ALS
float VL6180X_Read_Lux(uint8_t Gain)
{float lux;uint8_t reg;reg = VL6180X_READ_1Byte(VL6180X_REG_SYSTEM_INTERRUPT_CONFIG);reg &= ~0x38;reg |= (0x4<<3);VL6180X_WRITE_1Byte(VL6180X_REG_SYSALS_INTEGRATION_PERIOD_HI,0);VL6180X_WRITE_1Byte(VL6180X_REG_SYSALS_INTEGRATION_PERIOD_LO,100); //101msif (Gain > VL6180X_ALS_GAIN_40){Gain = VL6180X_ALS_GAIN_40;}VL6180X_WRITE_1Byte(VL6180X_REG_SYSALS_ANALOGUE_GAIN, 0x40 | Gain);VL6180X_WRITE_1Byte(VL6180X_REG_SYSALS_START, 0x1);// New Sample Ready threshold eventwhile (4 != ((VL6180X_READ_1Byte(VL6180X_REG_RESULT_INTERRUPT_STATUS_GPIO) >> 3) & 0x7));lux = VL6180X_READ_2Byte(VL6180X_REG_RESULT_ALS_VAL);VL6180X_WRITE_1Byte(VL6180X_REG_SYSTEM_INTERRUPT_CLEAR,0x07);lux *= 0.32f; // calibrated count/luxswitch(Gain) {case VL6180X_ALS_GAIN_1:break;case VL6180X_ALS_GAIN_1_25:lux /= 1.25f;break;case VL6180X_ALS_GAIN_1_67:lux /= 1.76f;break;case VL6180X_ALS_GAIN_2_5:lux /= 2.5f;break;case VL6180X_ALS_GAIN_5:lux /= 5;break;case VL6180X_ALS_GAIN_10:lux /= 10;break;case VL6180X_ALS_GAIN_20:lux /= 20;break;case VL6180X_ALS_GAIN_40:lux /= 20;break;}lux *= 100;lux /= 100; // integration time in msreturn lux;
}/* USER CODE END PM *//* Private variables ---------------------------------------------------------*/
UART_HandleTypeDef huart2;/* USER CODE BEGIN PV *//* USER CODE END PV *//* Private function prototypes -----------------------------------------------*/
void SystemClock_Config(void);
static void MX_GPIO_Init(void);
static void MX_USART2_UART_Init(void);
/* USER CODE BEGIN PFP *//* USER CODE END PFP *//* Private user code ---------------------------------------------------------*/
/* USER CODE BEGIN 0 */
uint8_t data[16];
/* USER CODE END 0 *//*** @brief The application entry point.* @retval int*/
int main(void)
{/* USER CODE BEGIN 1 */uint8_t ex_range = 0;/* USER CODE END 1 *//* MCU Configuration--------------------------------------------------------*//* Reset of all peripherals, Initializes the Flash interface and the Systick. */HAL_Init();/* USER CODE BEGIN Init *//* USER CODE END Init *//* Configure the system clock */SystemClock_Config();/* USER CODE BEGIN SysInit *//* USER CODE END SysInit *//* Initialize all configured peripherals */MX_GPIO_Init();MX_USART2_UART_Init();/* USER CODE BEGIN 2 */PY_usDelayTest();PY_usDelayOptimize();if(VL6180X_Init() == 1){while(1){printf("\r\nVL6180X initialization fails!\r\n");PY_Delay_us_t(2000000);}}PY_Delay_us_t(2000000);/* USER CODE END 2 *//* Infinite loop *//* USER CODE BEGIN WHILE */while (1){ex_range = VL6180X_Read_Range();printf("\r\n Current Range:%d mm",ex_range);/* USER CODE END WHILE *//* USER CODE BEGIN 3 */}/* USER CODE END 3 */
}/*** @brief System Clock Configuration* @retval None*/
void SystemClock_Config(void)
{RCC_OscInitTypeDef RCC_OscInitStruct = {0};RCC_ClkInitTypeDef RCC_ClkInitStruct = {0};/** Configure the main internal regulator output voltage*/HAL_PWREx_ControlVoltageScaling(PWR_REGULATOR_VOLTAGE_SCALE1);/** Initializes the RCC Oscillators according to the specified parameters* in the RCC_OscInitTypeDef structure.*/RCC_OscInitStruct.OscillatorType = RCC_OSCILLATORTYPE_HSI;RCC_OscInitStruct.HSIState = RCC_HSI_ON;RCC_OscInitStruct.HSIDiv = RCC_HSI_DIV1;RCC_OscInitStruct.HSICalibrationValue = RCC_HSICALIBRATION_DEFAULT;RCC_OscInitStruct.PLL.PLLState = RCC_PLL_ON;RCC_OscInitStruct.PLL.PLLSource = RCC_PLLSOURCE_HSI;RCC_OscInitStruct.PLL.PLLM = RCC_PLLM_DIV1;RCC_OscInitStruct.PLL.PLLN = 8;RCC_OscInitStruct.PLL.PLLP = RCC_PLLP_DIV2;RCC_OscInitStruct.PLL.PLLR = RCC_PLLR_DIV2;if (HAL_RCC_OscConfig(&RCC_OscInitStruct) != HAL_OK){Error_Handler();}/** Initializes the CPU, AHB and APB buses clocks*/RCC_ClkInitStruct.ClockType = RCC_CLOCKTYPE_HCLK|RCC_CLOCKTYPE_SYSCLK|RCC_CLOCKTYPE_PCLK1;RCC_ClkInitStruct.SYSCLKSource = RCC_SYSCLKSOURCE_PLLCLK;RCC_ClkInitStruct.AHBCLKDivider = RCC_SYSCLK_DIV1;RCC_ClkInitStruct.APB1CLKDivider = RCC_HCLK_DIV1;if (HAL_RCC_ClockConfig(&RCC_ClkInitStruct, FLASH_LATENCY_2) != HAL_OK){Error_Handler();}
}/*** @brief USART2 Initialization Function* @param None* @retval None*/
static void MX_USART2_UART_Init(void)
{/* USER CODE BEGIN USART2_Init 0 *//* USER CODE END USART2_Init 0 *//* USER CODE BEGIN USART2_Init 1 *//* USER CODE END USART2_Init 1 */huart2.Instance = USART2;huart2.Init.BaudRate = 115200;huart2.Init.WordLength = UART_WORDLENGTH_8B;huart2.Init.StopBits = UART_STOPBITS_1;huart2.Init.Parity = UART_PARITY_NONE;huart2.Init.Mode = UART_MODE_TX_RX;huart2.Init.HwFlowCtl = UART_HWCONTROL_NONE;huart2.Init.OverSampling = UART_OVERSAMPLING_16;huart2.Init.OneBitSampling = UART_ONE_BIT_SAMPLE_DISABLE;huart2.Init.ClockPrescaler = UART_PRESCALER_DIV1;huart2.AdvancedInit.AdvFeatureInit = UART_ADVFEATURE_NO_INIT;if (HAL_UART_Init(&huart2) != HAL_OK){Error_Handler();}/* USER CODE BEGIN USART2_Init 2 *//* USER CODE END USART2_Init 2 */}/*** @brief GPIO Initialization Function* @param None* @retval None*/
static void MX_GPIO_Init(void)
{GPIO_InitTypeDef GPIO_InitStruct = {0};/* GPIO Ports Clock Enable */__HAL_RCC_GPIOA_CLK_ENABLE();/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOA, GPIO_PIN_0, GPIO_PIN_RESET);/*Configure GPIO pin Output Level */HAL_GPIO_WritePin(GPIOA, GPIO_PIN_11|GPIO_PIN_12, GPIO_PIN_SET);/*Configure GPIO pin : PA0 */GPIO_InitStruct.Pin = GPIO_PIN_0;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_LOW;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pin : PA1 */GPIO_InitStruct.Pin = GPIO_PIN_1;GPIO_InitStruct.Mode = GPIO_MODE_INPUT;GPIO_InitStruct.Pull = GPIO_NOPULL;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);/*Configure GPIO pins : PA11 PA12 */GPIO_InitStruct.Pin = GPIO_PIN_11|GPIO_PIN_12;GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;GPIO_InitStruct.Pull = GPIO_NOPULL;GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_VERY_HIGH;HAL_GPIO_Init(GPIOA, &GPIO_InitStruct);}/* USER CODE BEGIN 4 *//* USER CODE END 4 *//*** @brief This function is executed in case of error occurrence.* @retval None*/
void Error_Handler(void)
{/* USER CODE BEGIN Error_Handler_Debug *//* User can add his own implementation to report the HAL error return state */__disable_irq();while (1){}/* USER CODE END Error_Handler_Debug */
}#ifdef USE_FULL_ASSERT
/*** @brief Reports the name of the source file and the source line number* where the assert_param error has occurred.* @param file: pointer to the source file name* @param line: assert_param error line source number* @retval None*/
void assert_failed(uint8_t *file, uint32_t line)
{/* USER CODE BEGIN 6 *//* User can add his own implementation to report the file name and line number,ex: printf("Wrong parameters value: file %s on line %d\r\n", file, line) *//* USER CODE END 6 */
}
#endif /* USE_FULL_ASSERT */测试输出
代码测试打印输出:
工程代码下载
STM32G030F6P6配置读取VL6180X完整工程下载
–End–