EIT/ERT技术在机器人触觉传感的硬件及电路实现
目录
一,需要了解的前置知识
1.1 研究背景及意义
1.1.1 机器人应用场景拓展,传统触觉传感跟不上需求
1.1.2 EIT/ERT 技术的特性,刚好匹配机器人触觉的核心诉求
1.2 国内外研究现状
1.2.1 EIT应用于机器人触觉传感研究现状
1.2.2 电阻抗成像方法研究现状
二,EIT/ERT的理论基础
2.1 EIT/ERT的正问题:已知电导率,求电势分布
2.1.1 定义与数学模型
2.1.2 核心求解方法:这里仅介绍有限元法(FEM)
2.1.3 EIT正问题的关键要点
2.2 EIT/ERT的逆问题:已知电压数据,求电导率分布
2.2.1 定义与核心难点
2.2.2 求解思路与典型算法
2.2.3 EIT逆问题的关键要点
三,EIT/ERT机器人触觉传感系统设计及实现
3.1 EIT/ERT系统的整体描述与工作流程
3.2 EIT/ERT系统的硬件实现
3.2.1 单片机最小系统的设计
3.2.2 EIT电流源电路的设计
3.2.3 EIT多路复用器电路的设计
3.2.4 EIT电压采集电路的设计
3.2.5 EIT电压DAC电路的设计
3.2.6 目前已经做好的一版EIT硬件电路
一,需要了解的前置知识
1.1 研究背景及意义
1.1.1 机器人应用场景拓展,传统触觉传感跟不上需求
随着近几年具身智能的发展,机器人开始从工业生产的场景逐渐向人类生活的场景发展,这就要求机器人需要有更强的环境感知能力,融合多种信息做出正确的人机交互决策。触觉作为一种与人类直接交互时最 “贴近” 的感知维度,既不像视觉容易被障碍物遮挡、也不像听觉会受环境噪音干扰,它能通过直接接触获取物理世界的 “真实反馈”—— 比如给孩子递玩具时,能感知小手的抓握力度来调整玩具高度;帮老人整理餐具时,能区分瓷碗的脆硬与塑料碗的韧性以控制拿捏力度;甚至在陪人下棋时,能通过指尖接触的轻压判断对方是否需要思考时间,这些细节直接决定了机器人能否 “不添乱、懂分寸” 地融入生活。
但具身智能机器人对触觉的需求,比工业场景要苛刻得多:它既要覆盖手掌、手臂等曲面肢体的 “大面积感知”,避免出现 “摸得到指尖、摸不到掌心” 的盲区;又要保证肢体活动时的 “柔性不卡顿”,不能因为装了传感器就影响弯腰、抬手等动作;还得实时反馈接触变化,比如感知到人手突然用力握它时,能立刻调整力度回应。而传统的触觉方案很难兼顾这些 —— 阵列式传感器因布线太多,会让机器人肢体变得僵硬;单点传感器只能感知局部受力,没法判断接触的整体情况,比如抓杯子时不知道哪边没抓稳,很容易导致物品滑落。
目前主流的触觉传感方案存在明显不足:
阵列式传感器依赖大量离散感测单元,单元数量增加会导致内部布线剧增,不仅降低机器人肢体的柔性和可伸展性(难以适配曲面结构),还容易引入电磁噪声;
单点式传感器只能获取局部压力数据,无法还原接触区域的整体情况(如压力梯度、接触形状),满足不了复杂交互的决策需求。
1.1.2 EIT/ERT 技术的特性,刚好匹配机器人触觉的核心诉求
EIT(电阻抗断层成像)和 ERT(电阻抗层析成像)本质是同一种技术,核心是通过物体表面的电极阵列施加微弱安全电流,测量电压变化后反演内部电阻抗分布,最终生成实时的断层图像。这种技术的特点,正好能解决传统触觉传感的痛点:
无需大量离散单元和复杂布线,仅靠表面电极就能实现大面积的分布式感知,既能适配机器人的曲面肢体,又能避免布线带来的柔性差、噪声大问题;
响应速度快(可达毫秒级),能实时捕捉接触过程中的力学变化(如压力分布的动态调整),满足机器人交互时的实时控制需求;
可通过算法反演接触位置、压力大小、接触形状等多维信息,比单点传感器能提供更全面的触觉数据,支撑复杂场景下的决策。
对走向生活场景的具身智能机器人来说,靠谱的触觉感知不是 “额外功能”,而是 “基础门槛”—— 只有通过触觉精准捕捉人类的交互意图、判断环境中物品的状态,机器人才能真正从 “会干活的工具” 变成 “能共情的帮手”。而 ERT/EIT 技术恰好能突破传统触觉方案的局限,帮机器人搭建起与人类、与生活环境之间的 “安全交互桥梁”,这也是研究它在具身智能机器人触觉领域应用的核心价值所在。
1.2 国内外研究现状
1.2.1 EIT应用于机器人触觉传感研究现状
David Hardman - Google Scholar
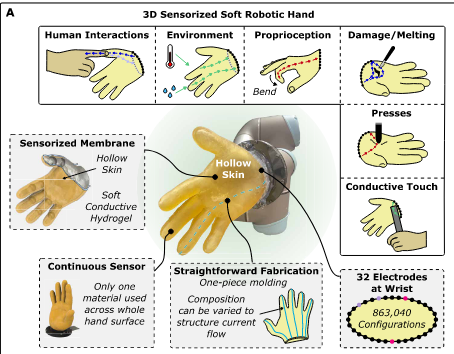
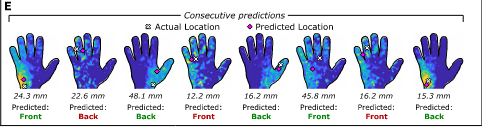
David Hardman教授课题组在2025/6/11,该课题组在Science Robotic发表论文《Multimodal information structuring with single-layer soft skins and high-density electrical impedance tomography》该研究成果将传统的二维EIT成像扩展到了三维EIT成像,这也是我们课题组开始着手考虑做EIT的原因。
Jung Kim - Google Scholar
Jung Kim教授课题组从2019年非常有前瞻性的研究ERT/EIT技术在机器人触觉传感上的应用,在2019-2025年间,T-RO,RA-L等机器人顶刊及IROS,ICRA等机器人顶会发了很多关于ERT/EIT技术在机器人触觉传感方向的论文,主要研究的方法为ET技术在柔性传感器的应用以及EIT成像算法的创新型研究。
1.2.2 电阻抗成像方法研究现状
电阻抗层析成像作为一种新兴的成像技术,对许多研究领域作出了贡献。在 20 世纪 80 年代早期,电阻抗层析成像研究的理念大量集中在临床应用上。医疗应用领域方面,旨在探测各种疾病,比如人脑功能、肺功能、胃功能、乳腺癌等。在材料工程方面,EIT 被用来映射材料的结构。EIT 可以检测不同 pH 值环境下碳纳米管薄膜的响应。在生物技术中, 许多文献已经表明 EIT 可以通过测量电性能的空间分布来提供某些细胞信息,如细胞 活力、分布、大小。
从数学的角度来看,EIT 重建问题是一个“以少求多”的非线性逆问题,具有不适定性,这导致采用 EIT 技术的大面积触觉传感器具有相对较低的空间分辨率和时间分辨率,并且在压力强度和接触情况的识别上面临限制。这些问题都与传感材料、数据采集和重建算法有关,需要着重研究解决。
二,EIT/ERT的理论基础
2.1 EIT/ERT的正问题:已知电导率,求电势分布
2.1.1 定义与数学模型
定义:给定传感区域 Ω 的电导率分布 σ、边界电流密度 j,求解区域内的电势 φ 分布,本质是 “已知介质电学属性,求电场响应”。
数学基础:基于麦克斯韦方程组简化推导,在低频 EIT 场景(10kHz-200kHz)下,忽略位移电流等高频项,核心方程为:
- 电场旋度为 0:∇×E = 0(静电场特性);
- 电流守恒:∇・J = 0(J 为传导电流密度,J=σE);
- 电势与电场关系:E = -∇φ;
最终推导得边界值问题:∇・(σ∇φ) = 0(区域内无独立电流源时),边界条件为 j = σ(∂φ/∂n)(n 为边界法向量)。
2.1.2 核心求解方法:这里仅介绍有限元法(FEM)
EIT 正问题需处理复杂传感区域(如机器人三维曲面),解析法难以求解,需依赖数值方法,其中有限元法(FEM) 是其中一种常用的方法,具体流程如下:
- 区域离散化:将连续的传感区域 Ω 剖分为大量小单元(二维为三角形 / 矩形,三维为四面体),假设每个单元内电导率恒定。
- 单元求解:通过线性插值函数建立单元内电势 φ 与节点电势的关系,代入核心方程求解每个单元的电势分布。
- 全局整合:将所有单元的局部解整合为全局方程组,得到整个传感区域的电势分布。
- 工具支撑:使用 EIDORS 开源工具包实现正问题建模,可定义传感器几何形状、电极数量 / 位置、电导率值,自动计算电势分布与雅可比矩阵。
2.1.3 EIT正问题的关键要点
常用数值方法对比:边界元法(BEM)、有限差分法(FDM)均不适用于机器人触觉传感 ——BEM 仅聚焦边界,无法覆盖大面积传感区域;FDM 对不规则曲面(如机器人手臂)需精细化网格,计算成本高,因此 FEM 是最优选择。
雅可比矩阵关联:正问题求解的电势分布是计算雅可比矩阵(J)的关键,J 描述电导率微小变化对边界电压的影响,为逆问题的图像重建提供核心矩阵。
2.2 EIT/ERT的逆问题:已知电压数据,求电导率分布
EIT 逆问题是 EIT 技术的核心与难点,本质是 “图像重建”—— 通过传感区域边界电极的电压测量数据 v 和雅可比矩阵 J,反推区域内的电导率分布 σ,直接决定触觉传感的精度与实时性。
2.2.1 定义与核心难点
定义:给定边界电压测量数据 v、雅可比矩阵 J,求解传感区域内的电导率分布 σ,即 “已知电场响应,反推介质电学属性”,是典型的 “以少求多” 问题。
三大核心难点:
- 不适定性:电极数量有限,测量数据量远少于电导率分布的未知变量数,导致解不唯一;
- 非线性:EIT 属于 “软场” 成像,电压与电导率呈非线性映射关系(电场分布受介质电学属性影响),无法简单线性反推;
- 病态性:对测量噪声 / 误差极度敏感,边界电压的微小扰动会导致电导率重建结果严重失真,出现伪影或形变。
2.2.2 求解思路与典型算法
逆问题的求解需通过 “线性化近似 + 正则化约束” 缓解不适定性,这里重点介绍了差分成像方法与经典重建算法:
差分成像方法:通过 “参考帧 - 当前帧” 的差分数据简化非线性问题,常用三类:
- 时间差分:对比不同时间点的电压变化(Δv = v_cur - v_ref),适用于动态场景(如触摸跟踪);
- 频率差分:对比不同频率下的电压响应,反映介质频率相关电学特性;
- 绝对成像:直接求解电导率绝对分布,需极高精度的测量系统,理论可行但实操难度大。
经典重建算法:核心是通过正则化技术添加约束,使不适定问题转化为稳定可解的优化问题:
- Tikhonov 正则化:通过 L2 范数惩罚项平衡 “数据拟合精度” 与 “模型复杂度”,核心公式为:σ = (J^T J + αI)^(-1)・J^T v(α 为正则化参数,I 为单位矩阵),可快速得到平滑解,但易模糊目标边界;
- Landweber 迭代法:基于梯度下降的迭代算法,通过逐步调整电导率分布逼近真实解,公式为 σ_(k+1) = σ_k + λJ^T (v_meas - v_calc (σ_k))(λ 为松弛参数),但收敛速度慢,需多次迭代。
2.2.3 EIT逆问题的关键要点
核心目标:通过算法优化,降低图像伪影、提升空间分辨率,为机器人触觉传感提供 “触摸位置、力度、数量” 等多维度信息;
与正问题的关联:逆问题依赖正问题求解的雅可比矩阵 J,J 的精度直接影响电导率重建结果,因此正问题的有限元建模需足够精细(用 EIDORS 剖分细小网格)。
三,EIT/ERT机器人触觉传感系统设计及实现
3.1 EIT/ERT系统的整体描述与工作流程
这里是一个EIT/ERT硬件系统的运行框图,下面简要介绍一下EIT/ERT系统硬件系统的运行流程:
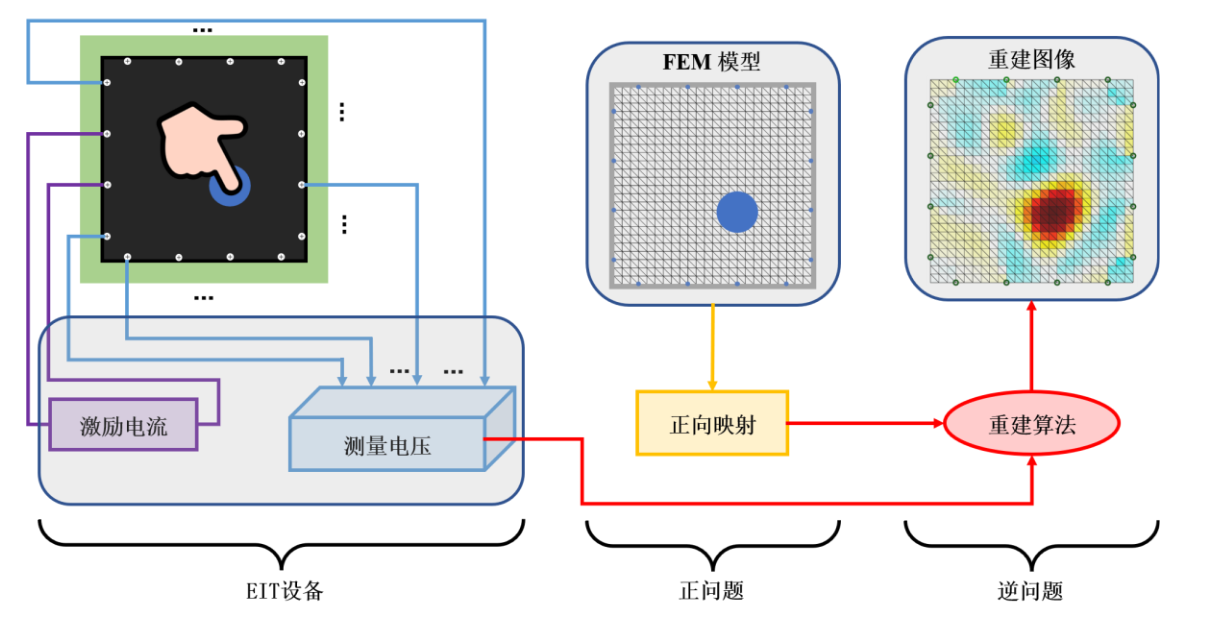
- 第一步:主控电路控制交流电流源产生高质量的高频差分交流电流激励
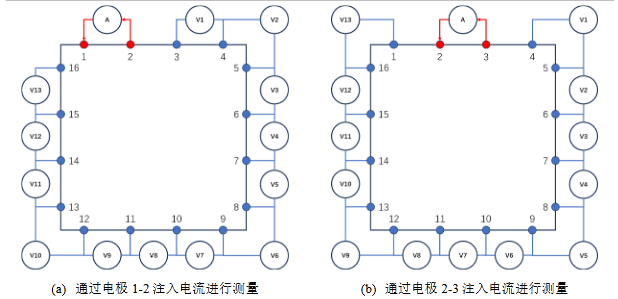
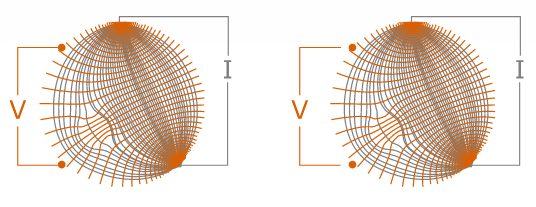
- 第二步:主控电路控制高速多路复用器选通一对电极对将交流电流源产生高频差分交流电流激励注入整个导电域,使得导电域产生电势分布
- 第三步:主控电路控制高速多路复用器选通另一对电极对将交流电流源产生的电场中一对差分电压信号送到下一级
- 第四步:差分电压放大器将接收到的毫伏级别的差分电压信号进行放大,通过设置放大倍数使得信号稳定在0V-5V这个范围,便于ADC采集
- 第五步:将放大后的信号输入高速ADC采集芯片,进行AD转换,输出数字信号到主控端读取
这样就完成了一次最基本的EIT/ERT电流注入和电压采集,通过多次合理的EIT电流注入和电压测量测量,可以实现对于EIT逆问题中触觉图像重建。
3.2 EIT/ERT系统的硬件实现
目前实验室做的这一版EIT采集系统的硬件是基于MIT之前的一个开源项目的电路来做的,这个开源项目的硬件电路在立创EDA的开源广场也是有的,具体链接如下:
https://oshwhub.com/dql2016/simpleeit3
因为ESP32-PICO不太好用,在目前已经打样的版本里主控换成了ESP32S3,并且对原作者的电路做了一些小改进,不过大体思路还是按照他这个项目来的
3.2.1 单片机最小系统的设计
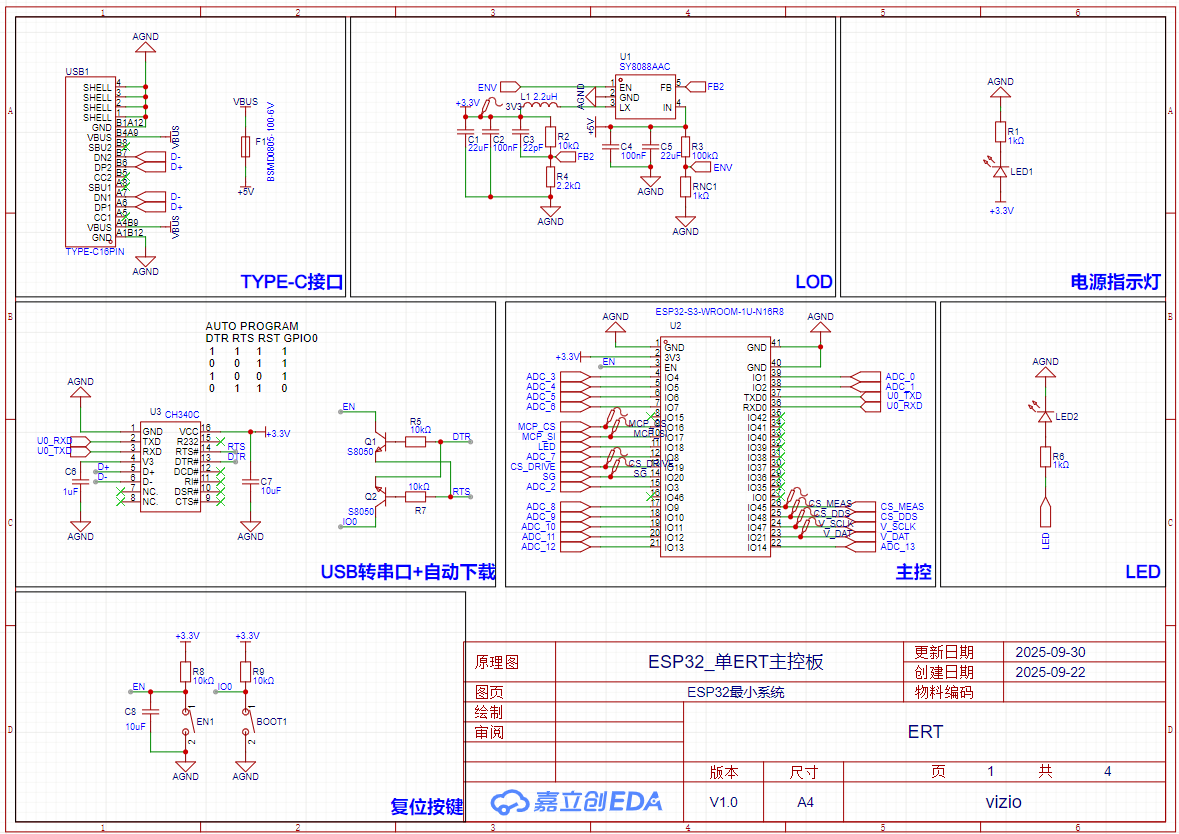
1. TYPE-C 接口模块
采用 TYPE-C 接口(USB1),实现电源输入和程序下载的串口通信。
VBUS 引脚经保险丝 F1(1000mA/250V)输出 + 5V,为后续电源转换电路供电。
2. 电源转换(LOD)模块
核心芯片是SY8088A4C(DC-DC 转换器),将 + 5V 转换为系统所需的 **+3.3V**。
电路包含输入电容(C1、C2、C3)、电感 L1、反馈电阻(R3、R4)、输出电容(C4、C5),确保 + 3.3V 电源稳定可靠。
3. 电源指示灯模块
LED1 串联电阻 R1(1kΩ),连接 + 3.3V 和 AGND,用于指示 + 3.3V 电源是否正常供电。
4. USB 转串口 + 自动下载模块
核心芯片是CH340C,实现USB 到串口的转换,使电脑能通过 USB 接口与 ESP32 通信。
搭配由三极管 Q1、Q2(S8050)和电阻 R6、R7 组成的自动下载电路,可自动触发 ESP32 的下载模式(利用 DTR、RTS 信号控制复位和 BOOT 引脚),无需手动操作。
5. 主控模块
核心是ESP32-S3-WROOM-1-U-N1R8G单片机,这是系统的控制核心。
引脚包含:ADC 接口(ADC_0~ADC_13)、SPI 接口(MCP_CS、CS_DRIVE 等)、串口(U0_TXD、U0_RXD)及多个通用 IO 口,用于扩展传感器、执行器等外设。
6. LED 指示模块
LED2 串联电阻 R8(1kΩ),由 ESP32 的 IO 口控制,用于系统状态指示(如程序运行状态、功能触发等)。
7. 复位按键模块
EN1 按键是系统复位键,按下时拉低 EN 引脚,实现 ESP32 复位;BOOT1 按键用于手动进入下载模式(配合自动下载电路,也可手动触发)。
电容 C8(10μF)和电阻 R8、R9(上拉电阻)构成复位电路,确保系统上电稳定。
3.2.2 EIT电流源电路的设计
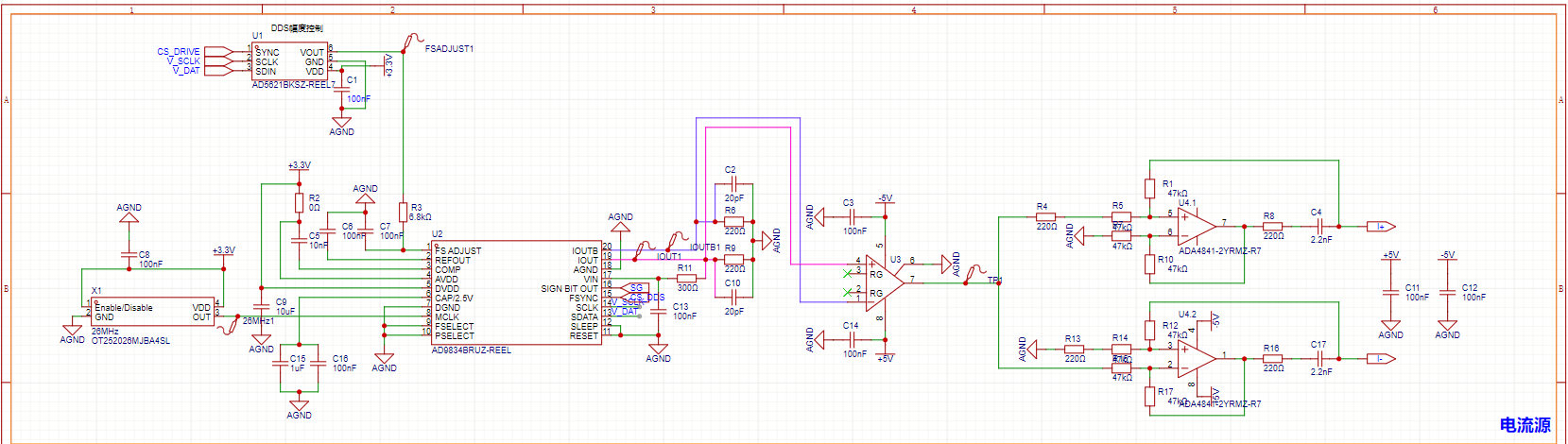
1. DDS 信号产生模块
核心:AD9834(U2,高精度 DDS 芯片)
功能:产生可编程的正弦波、方波等信号,频率、相位可通过数字接口(SCLK、SDATA、FSYNC)由外部控制器配置。
时钟源:由26MHz 晶振 X1(OT2620BMJ845L)提供稳定时钟,确保输出信号频率精度。
辅助控制:AD582(U1,采样保持放大器)** 用于控制 DDS 的频率调整(FSADJUST 引脚),增强频率设置的稳定性。
电源与滤波:+3.3V 供电,搭配 C6、C7、C9、C15、C18 等电容进行电源滤波,AGND 为模拟地,确保信号纯净。
2. 信号调理模块
核心:差分放大器 AD8220
功能:将 DDS 输出的差分电流信号(IOUTA、IOUTB)转换为电压信号,并进行初步放大。
电源与耦合:±5V 供电,C3、C14 为耦合电容,实现信号的交流耦合与噪声隔离,TP1 为测试点,便于信号观测。
3. 电流源差分输出放大模块
核心:ADA4841-2(U4,高速差分运放)
功能:对调理后的信号进行高增益、低失真放大,驱动后级负载或输出,产生精密、稳定的电流输出,可用于传感器激励、有源负载等场景。
电路设计:U4.1 和 U4.2 组成对称的差分放大电路,R5、R6、R10(47kΩ)与 R4、R8(220Ω)构成反馈网络,设置放大倍数;C4、C17 为输出耦合电容,实现信号的隔离与传输。
3.2.3 EIT多路复用器电路的设计
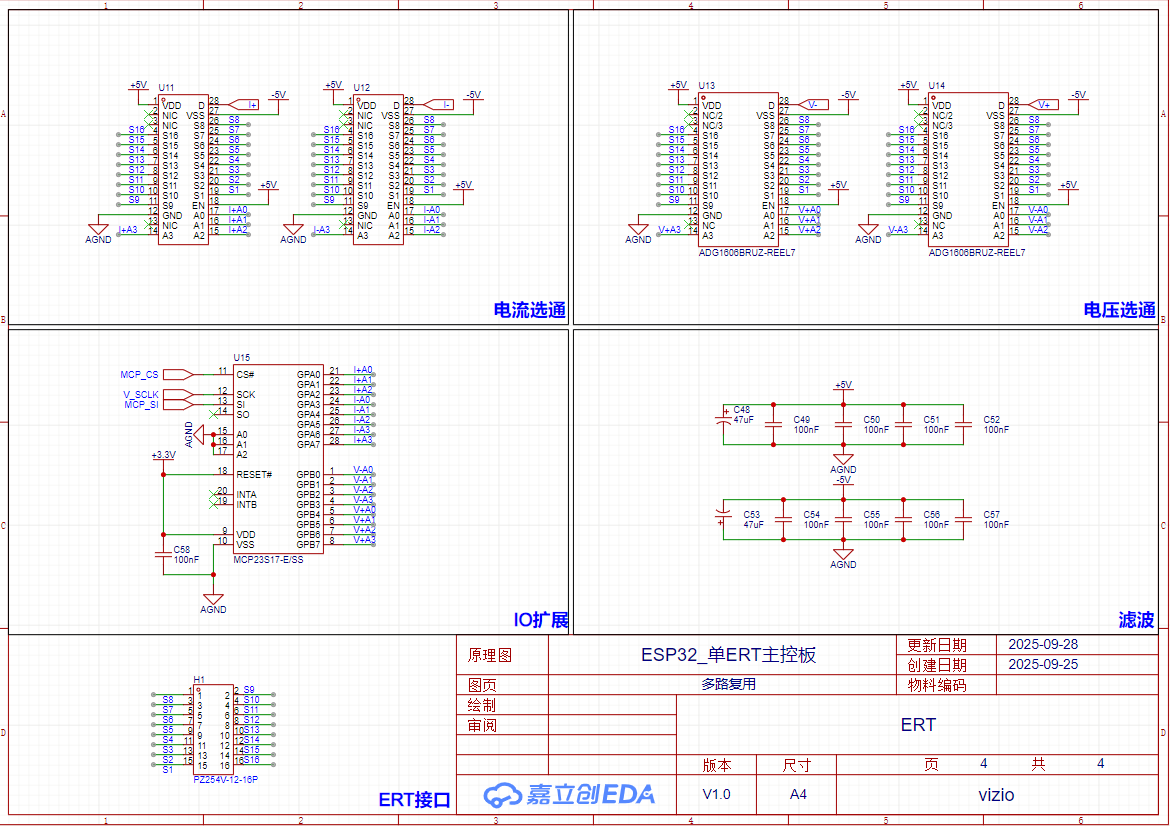
1. 电流选通模块
核心:2 片多路模拟开关芯片(如 ADG 系列),用于切换多路电流信号通道,实现不同电流信号的选通控制。
电源:±5V 供电,AGND 为模拟地,保障信号纯净度。
2. 电压选通模块
核心:2 片ADG1608BRUZ(多路模拟开关),用于切换多路电压信号通道。
功能:通过 S0~S7 等控制端选择不同电压输入 / 输出通道,适用于多通道电压信号的采集或切换场景。
3. IO 扩展模块
核心:MCP23S17-E/SS(SPI 接口 IO 扩展芯片)
功能:通过 SPI 接口(MCP_CS、V_SCLK、MCP_SI)扩展 GPIO,增加系统输入输出能力,可用于多路开关控制、状态检测等场景。
辅助:+3.3V 供电,配备复位电路和电源滤波电容,保障工作稳定性。
4. 滤波模块
电路:由多颗电容(100nF、47μF)组成电源滤波网络,对 + 5V、-5V、AGND 进行滤波,抑制电源噪声,提升系统整体稳定性。
3.2.4 EIT电压采集电路的设计
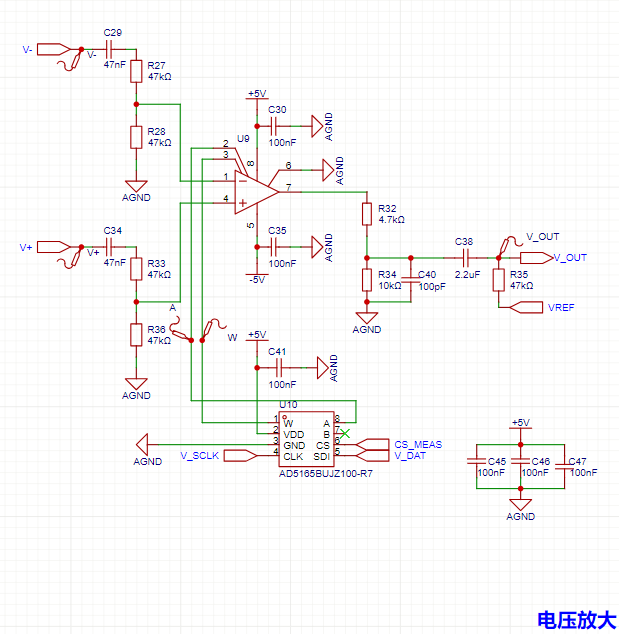
1. 差分输入与预处理模块
输入:V+和V-为差分信号输入,经电容C29、C34(47nF)交流耦合,电阻R27、R28、R33、R36(47kΩ)构成分压 / 偏置网络,将输入信号调理至后续放大电路的适配范围,AGND为模拟地,确保信号纯净。
2. 精密差分放大模块
核心:AD8421(仪表放大器),具备高共模抑制比、低噪声特性,用于对差分输入信号进行高精度放大。
电源与滤波:采用 ±5V 和 - 10V 供电,C30、C35(100nF)为电源滤波电容,提升供电稳定性,抑制电源噪声。
3. 可编程增益控制模块
核心:AD5165BUJZ100-R7(数字电位器),通过 SPI 接口(V_SCLK、V_DAT、CS_MEAS)实现数字控制,可灵活调节 AD8421 的增益,使电路适配不同幅度的输入信号。
4. 输出调理与滤波模块
电路:R32、R34、C40组成 RC 滤波网络,C38(2.2μF)实现输出耦合,R35(47kΩ)配合VREF可调节输出偏置;C45、C46、C47(100nF)对 + 5V 电源滤波,进一步抑制噪声。
3.2.5 EIT电压DAC电路的设计
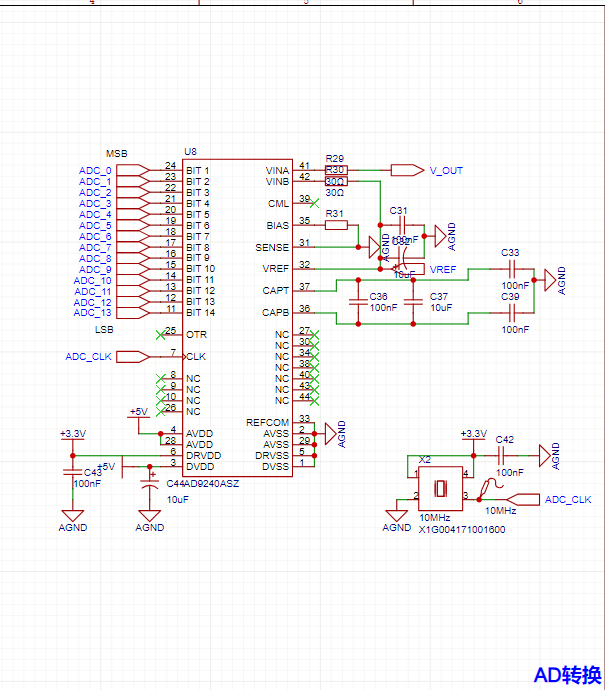
1. ADC 核心模块
核心器件:AD9240ASZ(U8),是一款 14 位高速 ADC,支持最高 40MSPS 的采样率,可将模拟信号转换为 14 位数字信号(ADC_0~ADC_13 为数字输出,MSB 到 LSB 依次排列)。
2. 模拟输入与调理模块
输入:V_OUT经 R29、R30(300Ω)匹配后,通过 VINA(41 脚)、VINB(42 脚)差分输入;C31(100pF)为滤波电容,AGND为模拟地,抑制噪声干扰。
3. 参考与偏置模块
参考电压:VREF引脚(32 脚)外接滤波网络(C33、C39、C37、C36),稳定内部参考电压,保障转换精度。
偏置与共模控制:CML(39 脚)、BIAS(35 脚)、SENSE(31 脚)等引脚实现内部偏置电流和共模电平的控制。
4. 时钟与电源模块
时钟:由10MHz 晶振 X2(X1G004171001600)提供,经 C42(100nF)滤波后输出ADC_CLK,控制 ADC 转换时序。
电源:采用 + 5V 和 + 3.3V 供电,C43(100nF)、C44(10μF)为电源滤波电容,抑制电源噪声。
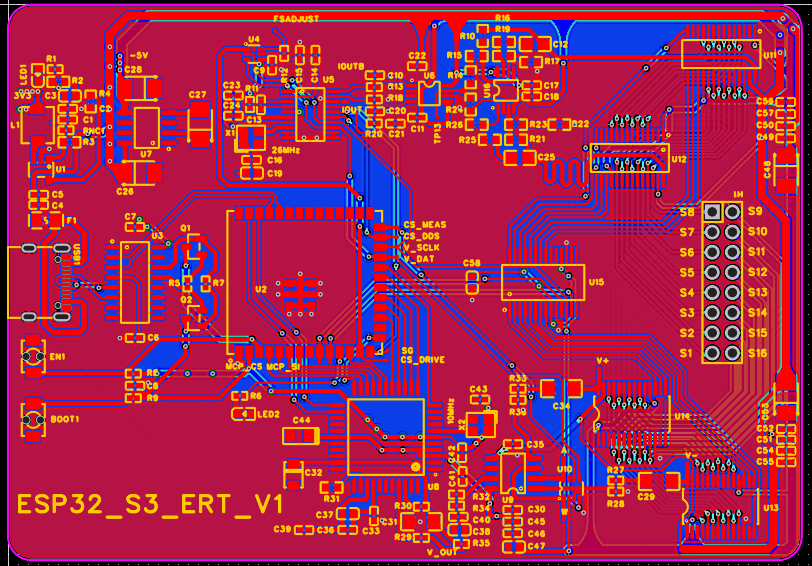
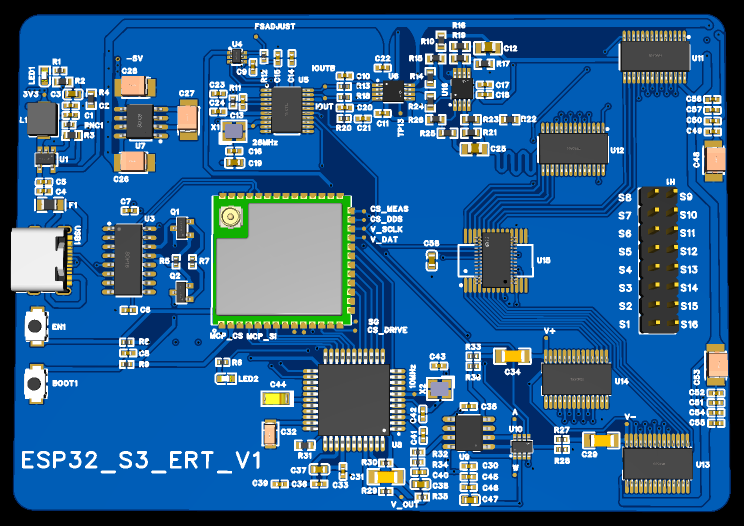
3.2.6 目前已经做好的一版EIT硬件电路