【完整源码+数据集+部署教程】【零售和消费品&家居用品】家庭门窗开闭状态安全监控系统源码&数据集全套:改进yolo11-DCNV2
背景意义
随着智能家居技术的迅速发展,家庭安全监控系统逐渐成为现代家庭生活中不可或缺的一部分。传统的安全监控手段往往依赖于人工监控或简单的报警系统,难以实现实时、智能化的安全防护。近年来,基于深度学习的目标检测技术,尤其是YOLO(You Only Look Once)系列模型,因其高效性和准确性而受到广泛关注。YOLOv11作为该系列的最新版本,具有更快的检测速度和更高的精度,适合应用于家庭安全监控领域。
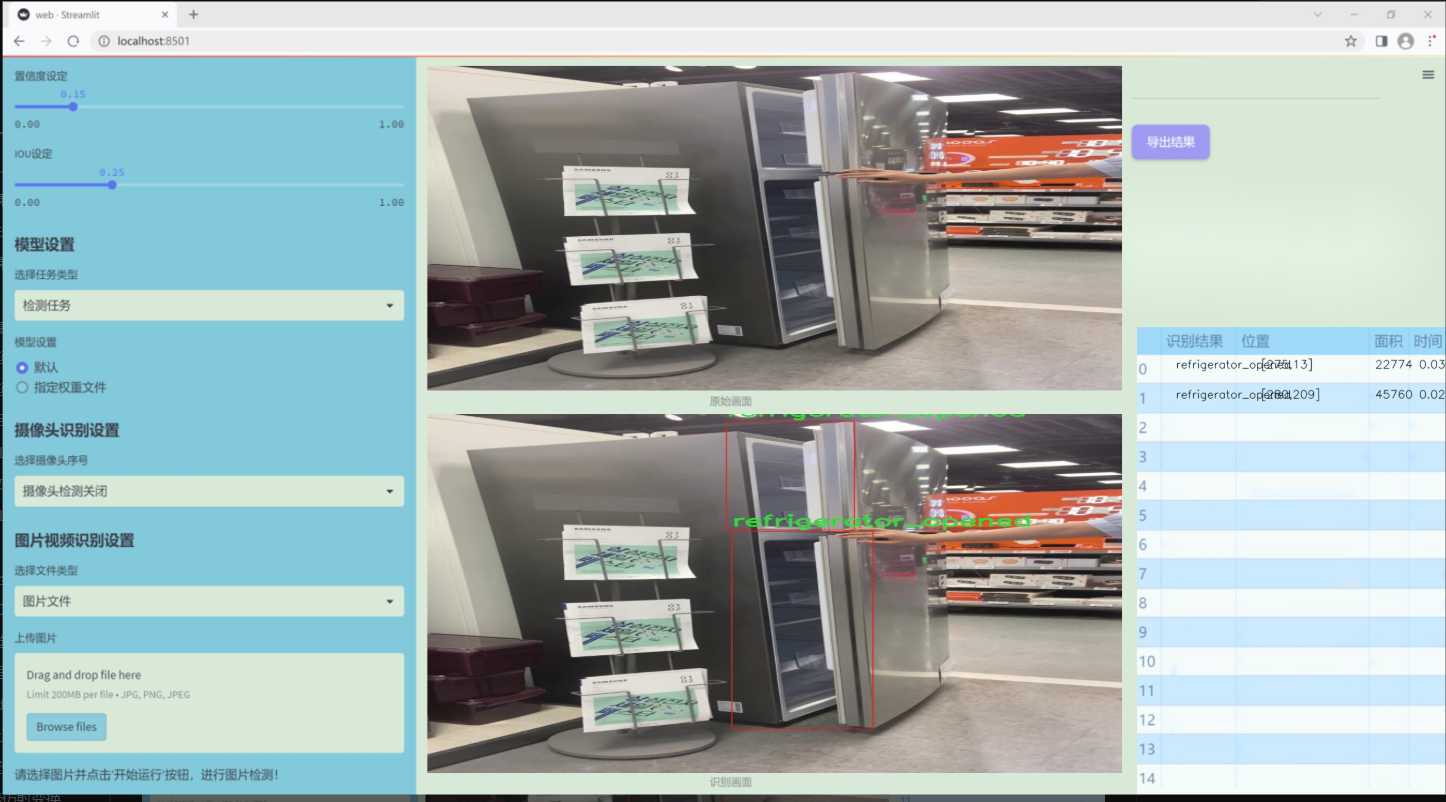
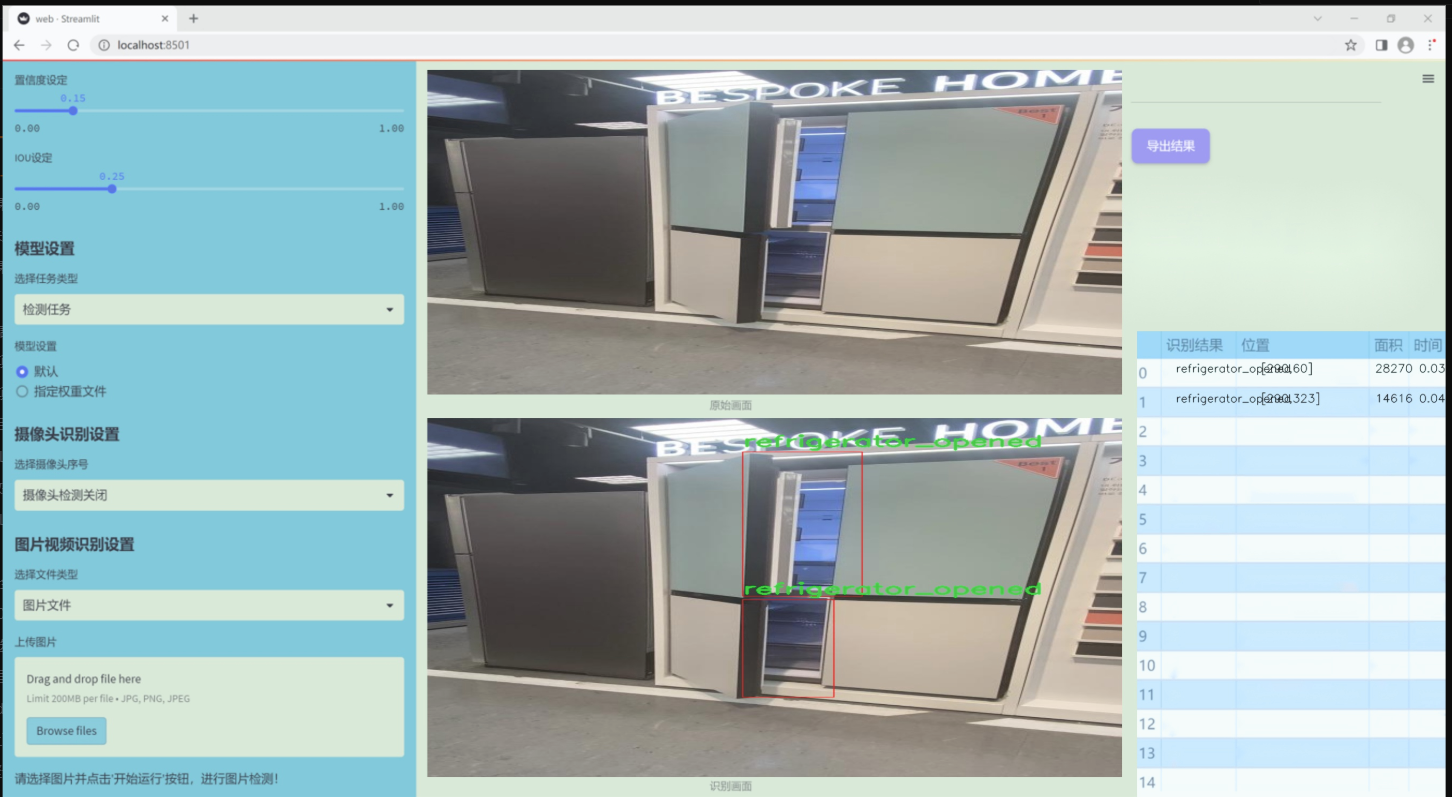
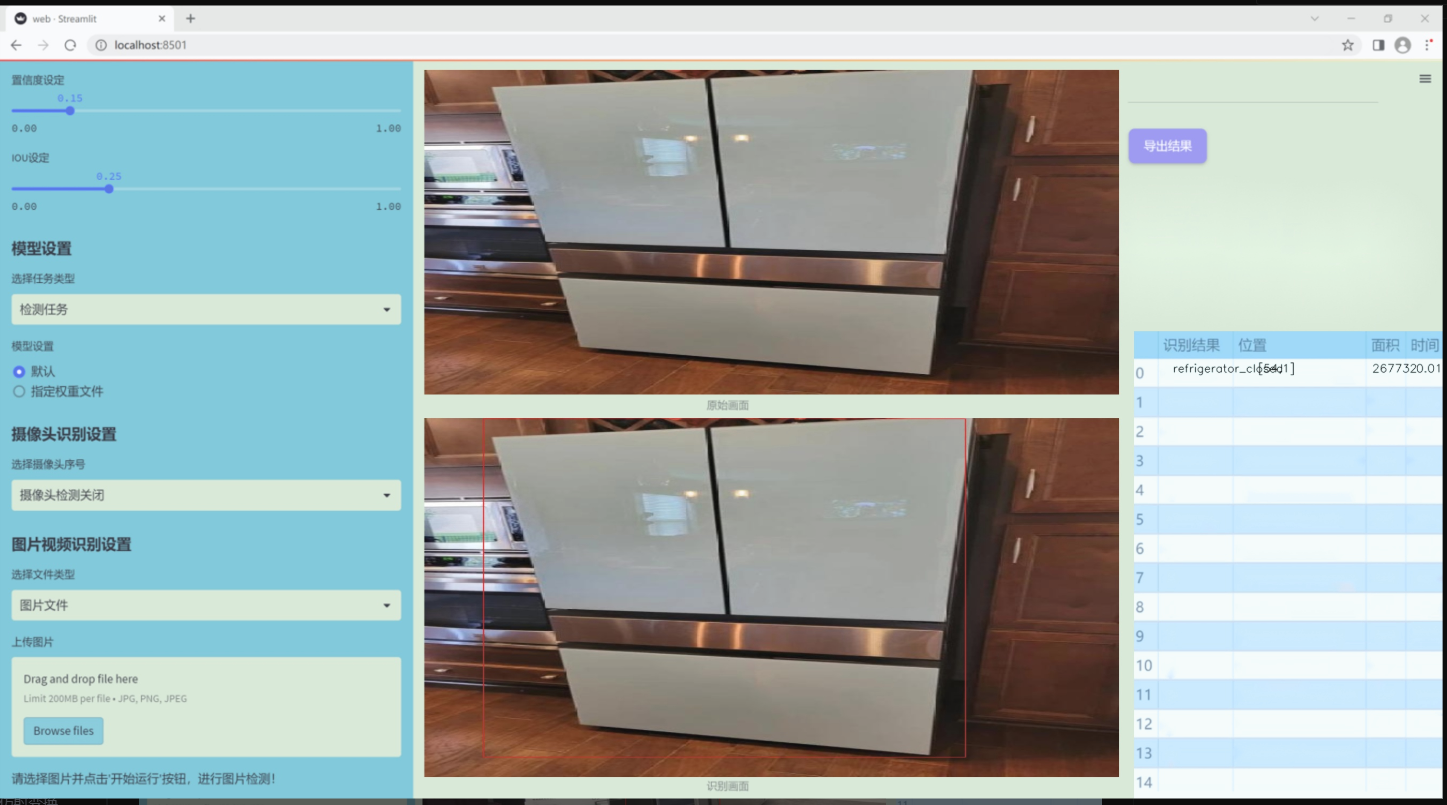
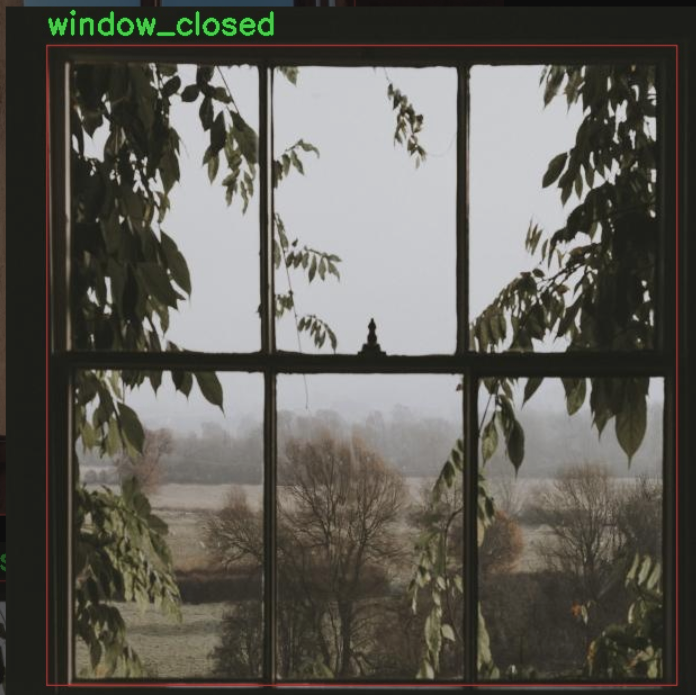
本研究旨在基于改进的YOLOv11模型,开发一套家庭门窗开闭状态的安全监控系统。该系统将通过实时监测家庭门窗的状态,及时识别潜在的安全隐患,提升家庭安全防护能力。我们所使用的数据集包含5900张图像,涵盖了三类主要目标:门的开闭状态、窗户的开闭状态以及气体设备的开关状态。这些类别不仅包括门窗的开闭状态(door_closed、door_opened、window_closed、window_opened),还涉及到家庭日常生活中可能存在的安全隐患,如气体设备的开启与关闭(gas_turn_on、gas_turn_off)以及冰箱的状态(refrigerator_closed、refrigerator_opened)。通过对这些状态的监测,系统能够及时发出警报,防止意外事故的发生。
此外,家庭安全监控系统的智能化升级,不仅能够提升家庭成员的安全感,还能有效降低因人为疏忽而导致的财产损失。通过引入深度学习技术,我们期望能够实现更高效的监测与识别,推动家庭安全监控技术的进一步发展。因此,本研究不仅具有重要的理论意义,还有着广泛的实际应用前景,为智能家居的安全防护提供了新的解决方案。
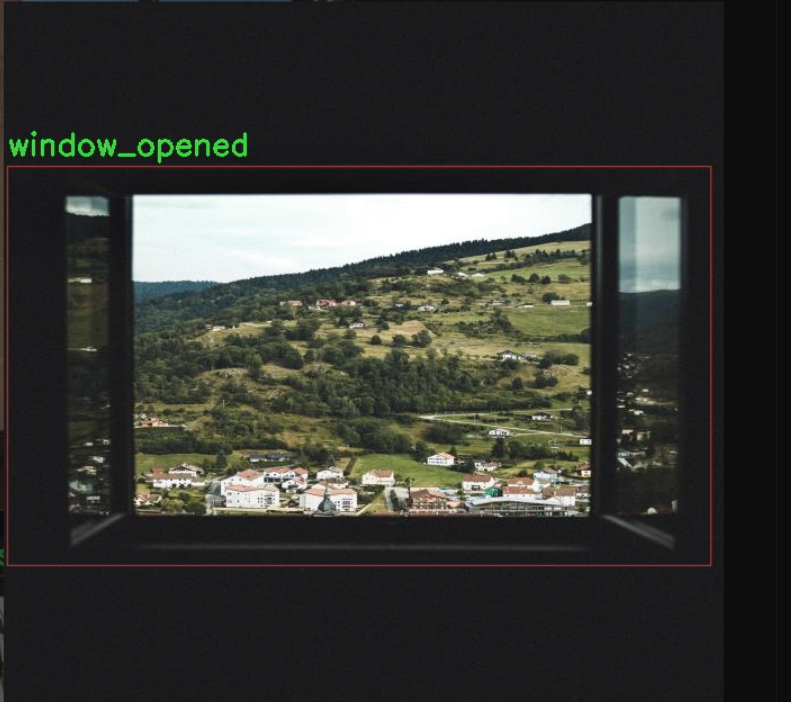
图片效果
数据集信息
本项目所使用的数据集名为“Security-Detection”,旨在为改进YOLOv11的家庭门窗开闭状态安全监控系统提供强有力的支持。该数据集共包含9个类别,涵盖了家庭安全监控中常见的状态,具体包括“Fall_Detected”(跌倒检测)、“door_closed”(门关闭)、“door_opened”(门打开)、“gas_turn_off”(燃气关闭)、“gas_turn_on”(燃气开启)、“refrigerator_closed”(冰箱关闭)、“refrigerator_opened”(冰箱打开)、“window_closed”(窗户关闭)以及“window_opened”(窗户打开)。这些类别的设计充分考虑了家庭日常生活中的安全隐患,旨在通过智能监控系统及时识别和响应潜在的危险。
数据集中的每个类别均经过精心标注,确保模型在训练过程中能够准确学习到不同状态的特征。跌倒检测类别尤其重要,因为它直接关系到家庭成员的安全,尤其是老年人。门窗和燃气的状态监控则是家庭安全的基础,及时的状态变化检测能够有效预防事故的发生。冰箱的开闭状态监控不仅有助于食品安全,还能通过智能化管理提升家庭生活的便利性。
在数据集的构建过程中,考虑到了多样性和真实场景的复杂性,数据来源于不同的家庭环境,以确保模型的泛化能力。通过对这些状态的有效监测,改进后的YOLOv11模型将能够实时分析家庭环境的安全状况,提供及时的警报和反馈,从而大幅提升家庭安全防护的智能化水平。整体而言,“Security-Detection”数据集为本项目的成功实施奠定了坚实的基础,期待通过这一数据集的应用,推动家庭安全监控技术的进一步发展。


核心代码
以下是经过简化和注释的核心代码部分,保留了最重要的结构和功能:
import torch
import torch.nn as nn
from functools import partial
class Mlp(nn.Module):
“”" 多层感知机模块,包含两个卷积层和一个深度卷积层 “”"
def init(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):
super().init()
out_features = out_features or in_features # 输出特征数
hidden_features = hidden_features or in_features # 隐藏层特征数
self.fc1 = nn.Conv2d(in_features, hidden_features, 1) # 第一个卷积层
self.dwconv = DWConv(hidden_features) # 深度卷积层
self.act = act_layer() # 激活函数
self.fc2 = nn.Conv2d(hidden_features, out_features, 1) # 第二个卷积层
self.drop = nn.Dropout(drop) # Dropout层
def forward(self, x):x = self.fc1(x)x = self.dwconv(x)x = self.act(x)x = self.drop(x)x = self.fc2(x)x = self.drop(x)return x
class LSKblock(nn.Module):
“”" LSK模块,包含空间卷积和注意力机制 “”"
def init(self, dim):
super().init()
self.conv0 = nn.Conv2d(dim, dim, 5, padding=2, groups=dim) # 深度卷积
self.conv_spatial = nn.Conv2d(dim, dim, 7, stride=1, padding=9, groups=dim, dilation=3) # 空间卷积
self.conv1 = nn.Conv2d(dim, dim//2, 1) # 1x1卷积
self.conv2 = nn.Conv2d(dim, dim//2, 1) # 1x1卷积
self.conv_squeeze = nn.Conv2d(2, 2, 7, padding=3) # 压缩卷积
self.conv = nn.Conv2d(dim//2, dim, 1) # 1x1卷积
def forward(self, x): attn1 = self.conv0(x) # 通过深度卷积attn2 = self.conv_spatial(attn1) # 通过空间卷积attn1 = self.conv1(attn1) # 1x1卷积attn2 = self.conv2(attn2) # 1x1卷积attn = torch.cat([attn1, attn2], dim=1) # 拼接avg_attn = torch.mean(attn, dim=1, keepdim=True) # 平均注意力max_attn, _ = torch.max(attn, dim=1, keepdim=True) # 最大注意力agg = torch.cat([avg_attn, max_attn], dim=1) # 拼接平均和最大注意力sig = self.conv_squeeze(agg).sigmoid() # 压缩并激活attn = attn1 * sig[:,0,:,:].unsqueeze(1) + attn2 * sig[:,1,:,:].unsqueeze(1) # 加权组合attn = self.conv(attn) # 最终卷积return x * attn # 乘以输入
class Attention(nn.Module):
“”" 注意力模块 “”"
def init(self, d_model):
super().init()
self.proj_1 = nn.Conv2d(d_model, d_model, 1) # 投影层
self.activation = nn.GELU() # 激活函数
self.spatial_gating_unit = LSKblock(d_model) # LSK模块
self.proj_2 = nn.Conv2d(d_model, d_model, 1) # 投影层
def forward(self, x):shortcut = x.clone() # 残差连接x = self.proj_1(x)x = self.activation(x)x = self.spatial_gating_unit(x)x = self.proj_2(x)x = x + shortcut # 残差连接return x
class Block(nn.Module):
“”" 网络中的基本块,包含注意力和多层感知机 “”"
def init(self, dim, mlp_ratio=4., drop=0., drop_path=0., act_layer=nn.GELU):
super().init()
self.norm1 = nn.BatchNorm2d(dim) # 第一层归一化
self.norm2 = nn.BatchNorm2d(dim) # 第二层归一化
self.attn = Attention(dim) # 注意力模块
self.mlp = Mlp(in_features=dim, hidden_features=int(dim * mlp_ratio), act_layer=act_layer, drop=drop) # MLP模块
def forward(self, x):x = x + self.attn(self.norm1(x)) # 注意力连接x = x + self.mlp(self.norm2(x)) # MLP连接return x
class OverlapPatchEmbed(nn.Module):
“”" 图像到补丁的嵌入 “”"
def init(self, img_size=224, patch_size=7, stride=4, in_chans=3, embed_dim=768):
super().init()
self.proj = nn.Conv2d(in_chans, embed_dim, kernel_size=patch_size, stride=stride, padding=(patch_size // 2)) # 卷积嵌入
self.norm = nn.BatchNorm2d(embed_dim) # 归一化层
def forward(self, x):x = self.proj(x) # 卷积嵌入x = self.norm(x) # 归一化return x
class LSKNet(nn.Module):
“”" LSK网络结构 “”"
def init(self, img_size=224, in_chans=3, embed_dims=[64, 128, 256, 512], depths=[3, 4, 6, 3]):
super().init()
self.num_stages = len(embed_dims) # 网络阶段数
for i in range(self.num_stages):patch_embed = OverlapPatchEmbed(img_size=img_size // (2 ** i), in_chans=in_chans if i == 0 else embed_dims[i - 1], embed_dim=embed_dims[i])block = nn.ModuleList([Block(dim=embed_dims[i]) for _ in range(depths[i])]) # 生成多个Blocknorm = nn.BatchNorm2d(embed_dims[i]) # 归一化层setattr(self, f"patch_embed{i + 1}", patch_embed) # 动态添加属性setattr(self, f"block{i + 1}", block)setattr(self, f"norm{i + 1}", norm)def forward(self, x):outs = []for i in range(self.num_stages):patch_embed = getattr(self, f"patch_embed{i + 1}")block = getattr(self, f"block{i + 1}")norm = getattr(self, f"norm{i + 1}")x = patch_embed(x) # 嵌入for blk in block:x = blk(x) # 通过每个Blockx = norm(x) # 归一化outs.append(x) # 保存输出return outs
class DWConv(nn.Module):
“”" 深度卷积模块 “”"
def init(self, dim=768):
super(DWConv, self).init()
self.dwconv = nn.Conv2d(dim, dim, 3, padding=1, groups=dim) # 深度卷积
def forward(self, x):return self.dwconv(x) # 直接返回深度卷积结果
def lsknet_t(weights=‘’):
“”" LSKNet的一个变体,加载权重 “”"
model = LSKNet(embed_dims=[32, 64, 160, 256], depths=[3, 3, 5, 2])
if weights:
model.load_state_dict(torch.load(weights)[‘state_dict’]) # 加载权重
return model
if name == ‘main’:
model = lsknet_t(‘lsk_t_backbone-2ef8a593.pth’) # 实例化模型
inputs = torch.randn((1, 3, 640, 640)) # 随机输入
for i in model(inputs):
print(i.size()) # 打印输出尺寸
代码核心部分分析
Mlp: 实现了一个多层感知机,包含两个卷积层和一个深度卷积层,用于特征提取。
LSKblock: 通过深度卷积和空间卷积生成注意力特征,并结合平均和最大池化进行加权。
Attention: 通过残差连接和激活函数,结合LSK模块实现注意力机制。
Block: 组合了注意力模块和多层感知机,形成网络的基本构建块。
OverlapPatchEmbed: 将输入图像转换为补丁,进行特征嵌入。
LSKNet: 整体网络结构,包含多个阶段,每个阶段由嵌入层、多个Block和归一化层组成。
DWConv: 实现深度卷积,用于特征提取。
以上代码构成了一个深度学习模型的基础结构,适用于图像处理任务。
这个文件 lsknet.py 实现了一个名为 LSKNet 的深度学习模型,主要用于图像处理任务。代码中使用了 PyTorch 框架,包含了多个模块和类,构成了整个网络的结构。
首先,文件引入了必要的库,包括 PyTorch 的核心模块和一些辅助函数。接着,定义了几个重要的类。Mlp 类实现了一个多层感知机结构,包含了卷积层、深度卷积层、激活函数(GELU)和 dropout 层。这个类的 forward 方法定义了前向传播的过程。
LSKblock 类是一个核心模块,主要实现了一种特定的注意力机制。它通过多个卷积层和激活函数对输入进行处理,并使用 sigmoid 函数生成的权重对输入进行加权,最终输出与输入相乘的结果。
Attention 类则封装了一个注意力机制,它首先通过卷积层对输入进行线性变换,然后经过激活函数和 LSKblock 处理,最后再通过一个卷积层输出结果。这个类的设计使得网络能够关注输入特征的不同部分。
Block 类是网络的基本构建块,结合了注意力机制和多层感知机。它使用了批归一化和 dropout 技术来提高模型的稳定性和泛化能力。每个 Block 由两个主要部分组成:注意力部分和 MLP 部分,二者通过残差连接相结合。
OverlapPatchEmbed 类负责将输入图像转换为补丁嵌入。它使用卷积层来提取特征,并进行归一化处理。这个过程将输入图像划分为多个小块,便于后续的处理。
LSKNet 类是整个模型的主类,负责构建网络的不同阶段。它根据输入的参数设置不同的嵌入维度、深度和其他超参数。模型的前向传播方法将输入逐层传递,并在每个阶段进行处理,最终输出多个特征图。
DWConv 类实现了深度卷积操作,主要用于 Mlp 类中。深度卷积是一种特殊的卷积方式,可以有效减少参数数量和计算量。
此外,文件中还定义了 update_weight 函数,用于更新模型的权重。lsknet_t 和 lsknet_s 函数则分别创建了两种不同配置的 LSKNet 模型,并可以加载预训练的权重。
最后,在文件的主程序部分,创建了一个 LSKNet 模型实例,并生成了一个随机输入进行测试,打印出每个输出的尺寸。这部分代码可以用于验证模型的构建是否正确。
整体来看,这个文件实现了一个复杂的图像处理模型,结合了多种深度学习技术,具有较强的灵活性和可扩展性。
10.2 fast_kan_conv.py
以下是经过简化并添加详细中文注释的核心代码部分:
import torch
import torch.nn as nn
class RadialBasisFunction(nn.Module):
def init(self, grid_min: float = -2., grid_max: float = 2., num_grids: int = 8, denominator: float = None):
“”"
初始化径向基函数(RBF)模块。
参数:- grid_min: 网格的最小值- grid_max: 网格的最大值- num_grids: 网格的数量- denominator: 用于控制基函数平滑度的分母"""super().__init__()# 创建从 grid_min 到 grid_max 的线性空间grid = torch.linspace(grid_min, grid_max, num_grids)self.grid = torch.nn.Parameter(grid, requires_grad=False) # 将网格参数化,不需要梯度self.denominator = denominator or (grid_max - grid_min) / (num_grids - 1) # 计算分母def forward(self, x):"""前向传播,计算径向基函数的输出。参数:- x: 输入张量返回:- 经过径向基函数变换后的输出"""return torch.exp(-((x[..., None] - self.grid) / self.denominator) ** 2) # 计算RBF值
class FastKANConvNDLayer(nn.Module):
def init(self, conv_class, norm_class, input_dim, output_dim, kernel_size, groups=1, padding=0, stride=1, dilation=1, ndim: int = 2, grid_size=8, base_activation=nn.SiLU, grid_range=[-2, 2], dropout=0.0):
“”"
初始化FastKAN卷积层。
参数:- conv_class: 卷积层的类(如nn.Conv2d)- norm_class: 归一化层的类(如nn.InstanceNorm2d)- input_dim: 输入维度- output_dim: 输出维度- kernel_size: 卷积核大小- groups: 分组数- padding: 填充- stride: 步幅- dilation: 膨胀- ndim: 维度(1D, 2D, 3D)- grid_size: 网格大小- base_activation: 基础激活函数- grid_range: 网格范围- dropout: dropout比率"""super(FastKANConvNDLayer, self).__init__()self.inputdim = input_dimself.outdim = output_dimself.kernel_size = kernel_sizeself.padding = paddingself.stride = strideself.dilation = dilationself.groups = groupsself.ndim = ndimself.grid_size = grid_sizeself.base_activation = base_activation() # 实例化基础激活函数self.grid_range = grid_range# 验证分组参数if groups <= 0:raise ValueError('groups must be a positive integer')if input_dim % groups != 0:raise ValueError('input_dim must be divisible by groups')if output_dim % groups != 0:raise ValueError('output_dim must be divisible by groups')# 创建基础卷积层和样条卷积层self.base_conv = nn.ModuleList([conv_class(input_dim // groups, output_dim // groups, kernel_size, stride, padding, dilation, groups=1, bias=False) for _ in range(groups)])self.spline_conv = nn.ModuleList([conv_class(grid_size * input_dim // groups, output_dim // groups, kernel_size, stride, padding, dilation, groups=1, bias=False) for _ in range(groups)])# 创建归一化层self.layer_norm = nn.ModuleList([norm_class(output_dim // groups) for _ in range(groups)])# 初始化径向基函数self.rbf = RadialBasisFunction(grid_range[0], grid_range[1], grid_size)# 初始化dropout层self.dropout = nn.Dropout(p=dropout) if dropout > 0 else None# 使用Kaiming均匀分布初始化卷积层权重for conv_layer in self.base_conv:nn.init.kaiming_uniform_(conv_layer.weight, nonlinearity='linear')for conv_layer in self.spline_conv:nn.init.kaiming_uniform_(conv_layer.weight, nonlinearity='linear')def forward_fast_kan(self, x, group_index):"""快速KAN前向传播,处理每个分组的输入。参数:- x: 输入张量- group_index: 当前处理的分组索引返回:- 输出张量"""# 应用基础激活函数并进行线性变换base_output = self.base_conv[group_index](self.base_activation(x))if self.dropout is not None:x = self.dropout(x) # 应用dropoutspline_basis = self.rbf(self.layer_norm[group_index](x)) # 计算样条基spline_basis = spline_basis.moveaxis(-1, 2).flatten(1, 2) # 调整维度以适应卷积层spline_output = self.spline_conv[group_index](spline_basis) # 计算样条卷积输出x = base_output + spline_output # 合并基础输出和样条输出return xdef forward(self, x):"""前向传播,处理所有分组的输入。参数:- x: 输入张量返回:- 输出张量"""split_x = torch.split(x, self.inputdim // self.groups, dim=1) # 按组分割输入output = []for group_ind, _x in enumerate(split_x):y = self.forward_fast_kan(_x.clone(), group_ind) # 处理每个分组output.append(y.clone())y = torch.cat(output, dim=1) # 合并所有分组的输出return y
代码核心部分说明:
RadialBasisFunction类:实现了径向基函数的计算,主要用于将输入映射到高维空间,以便于后续的卷积操作。
FastKANConvNDLayer类:实现了一个灵活的卷积层,支持多维卷积,结合了基础卷积和样条卷积,使用径向基函数来增强模型的表达能力。
前向传播方法:forward_fast_kan和forward方法实现了输入的处理逻辑,包括分组处理、激活函数应用、dropout、样条基计算和输出合并。
这个程序文件 fast_kan_conv.py 定义了一些用于快速卷积操作的神经网络层,主要包括径向基函数(Radial Basis Function)和多维卷积层(FastKANConvNDLayer),以及其一维、二维和三维的具体实现。
首先,RadialBasisFunction 类是一个自定义的神经网络模块,使用了径向基函数来生成平滑的基函数。它的构造函数接受最小和最大网格值、网格数量以及分母参数。网格值通过 torch.linspace 生成,并且被定义为不可训练的参数。forward 方法计算输入 x 和网格之间的距离,并返回经过指数函数处理的结果,这个结果可以用于后续的卷积操作。
接下来,FastKANConvNDLayer 类是一个多维卷积层的基类,支持一维、二维和三维卷积。它的构造函数接受多个参数,包括输入和输出维度、卷积核大小、分组数、填充、步幅、扩张、网格大小、基础激活函数、网格范围和丢弃率等。构造函数中会检查分组数的有效性,并确保输入和输出维度可以被分组数整除。然后,它初始化了基础卷积层、样条卷积层、层归一化层和径向基函数模块。根据提供的丢弃率,选择适当的丢弃层。权重初始化使用了 Kaiming 均匀分布,以便于训练的开始。
forward_fast_kan 方法是该类的核心部分,负责处理输入数据。它首先对输入应用基础激活函数,然后通过基础卷积层进行线性变换。接着,如果使用了丢弃层,则对输入进行丢弃处理。之后,计算样条基函数并通过样条卷积层得到输出,最后将基础卷积的输出和样条卷积的输出相加,返回最终结果。
forward 方法将输入数据按组进行分割,并对每个组调用 forward_fast_kan 方法,最后将所有组的输出拼接在一起。
接下来的三个类 FastKANConv3DLayer、FastKANConv2DLayer 和 FastKANConv1DLayer 分别继承自 FastKANConvNDLayer,并指定了卷积类型(3D、2D 和 1D)和归一化类型(实例归一化)。这些类的构造函数调用了基类的构造函数,并传递了适当的参数。
总体而言,这个程序文件实现了一种高效的卷积层,结合了径向基函数和多维卷积操作,适用于深度学习中的图像和信号处理任务。
10.3 test_selective_scan_easy.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn.functional as F
def selective_scan_easy(us, dts, As, Bs, Cs, Ds, delta_bias=None, delta_softplus=False, return_last_state=False, chunksize=64):
“”"
选择性扫描函数,执行状态更新和输出计算。
参数:
us: 输入张量,形状为 (B, G * D, L)
dts: 时间增量张量,形状为 (B, G * D, L)
As: 状态转移矩阵,形状为 (G * D, N)
Bs: 影响输入的矩阵,形状为 (B, G, N, L)
Cs: 输出矩阵,形状为 (B, G, N, L)
Ds: 额外的输入影响,形状为 (G * D)
delta_bias: 可选的偏置,形状为 (G * D)
delta_softplus: 是否对 dts 应用 softplus
return_last_state: 是否返回最后的状态
chunksize: 处理的块大小返回:
输出张量和(可选的)最后状态
"""def selective_scan_chunk(us, dts, As, Bs, Cs, hprefix):"""处理每个块的选择性扫描。参数:us: 当前块的输入张量dts: 当前块的时间增量As: 状态转移矩阵Bs: 当前块的影响输入矩阵Cs: 当前块的输出矩阵hprefix: 前一个状态的输出返回:当前块的输出和更新后的状态"""ts = dts.cumsum(dim=0) # 计算时间增量的累积和Ats = torch.einsum("gdn,lbgd->lbgdn", As, ts).exp() # 计算状态转移的指数scale = 1 # 缩放因子rAts = Ats / scale # 归一化的状态转移duts = dts * us # 计算输入的影响dtBus = torch.einsum("lbgd,lbgn->lbgdn", duts, Bs) # 计算影响输入的影响hs_tmp = rAts * (dtBus / rAts).cumsum(dim=0) # 更新状态hs = hs_tmp + Ats * hprefix.unsqueeze(0) # 加上前一个状态ys = torch.einsum("lbgn,lbgdn->lbgd", Cs, hs) # 计算输出return ys, hs # 返回输出和更新后的状态# 数据类型设置
dtype = torch.float32
inp_dtype = us.dtype # 输入数据类型
has_D = Ds is not None # 检查是否有额外的输入影响
if chunksize < 1:chunksize = Bs.shape[-1] # 设置块大小# 处理输入数据
dts = dts.to(dtype)
if delta_bias is not None:dts = dts + delta_bias.view(1, -1, 1).to(dtype) # 应用偏置
if delta_softplus:dts = F.softplus(dts) # 应用 softplus# 处理维度
Bs = Bs.unsqueeze(1) if len(Bs.shape) == 3 else Bs
Cs = Cs.unsqueeze(1) if len(Cs.shape) == 3 else Cs
B, G, N, L = Bs.shape
us = us.view(B, G, -1, L).permute(3, 0, 1, 2).to(dtype)
dts = dts.view(B, G, -1, L).permute(3, 0, 1, 2).to(dtype)
As = As.view(G, -1, N).to(dtype)
Bs = Bs.permute(3, 0, 1, 2).to(dtype)
Cs = Cs.permute(3, 0, 1, 2).to(dtype)
Ds = Ds.view(G, -1).to(dtype) if has_D else None
D = As.shape[1] # 状态维度oys = [] # 输出列表
hprefix = us.new_zeros((B, G, D, N), dtype=dtype) # 初始化前一个状态
for i in range(0, L, chunksize):ys, hs = selective_scan_chunk(us[i:i + chunksize], dts[i:i + chunksize], As, Bs[i:i + chunksize], Cs[i:i + chunksize], hprefix, )oys.append(ys) # 收集输出hprefix = hs[-1] # 更新前一个状态oys = torch.cat(oys, dim=0) # 合并输出
if has_D:oys = oys + Ds * us # 添加额外的输入影响
oys = oys.permute(1, 2, 3, 0).view(B, -1, L) # 调整输出维度return oys.to(inp_dtype) if not return_last_state else (oys.to(inp_dtype), hprefix.view(B, G * D, N).float()) # 返回输出和状态
代码说明
函数定义:selective_scan_easy 是一个选择性扫描的函数,主要用于在给定输入和时间增量的情况下,计算输出和状态更新。
内部函数:selective_scan_chunk 用于处理每个块的计算,使用张量运算来更新状态和计算输出。
参数处理:函数首先处理输入参数,包括时间增量、状态转移矩阵等,并进行必要的维度调整。
输出计算:通过循环处理每个块,调用内部函数进行状态更新和输出计算,最后将结果合并并返回。
这个核心部分是实现选择性扫描的基础,涉及张量运算和状态更新的逻辑。
这个程序文件 test_selective_scan_easy.py 实现了一个名为 selective_scan_easy 的函数,该函数用于执行选择性扫描操作,通常用于序列数据的处理,尤其是在深度学习模型中。文件中包含了多个函数和类,主要功能是计算和反向传播,适用于 PyTorch 框架。
首先,文件导入了一些必要的库,包括 torch 和 pytest,并定义了一些常量和模式。selective_scan_easy 函数的输入包括多个张量(us, dts, As, Bs, Cs, Ds),这些张量代表了批量数据、时间步长、状态转移矩阵等。函数内部定义了一个嵌套函数 selective_scan_chunk,用于处理数据块的选择性扫描逻辑。
在 selective_scan_easy 函数中,首先对输入数据进行类型转换和形状调整,以确保它们符合后续计算的要求。接着,函数通过循环分块处理输入数据,调用 selective_scan_chunk 进行计算,最终将结果合并并返回。
SelectiveScanEasy 类是一个自定义的 PyTorch 自动求导函数,包含 forward 和 backward 方法。forward 方法实现了前向传播逻辑,计算输出和最后的状态;backward 方法实现了反向传播逻辑,计算梯度。该类支持混合精度计算,使用了 torch.cuda.amp.custom_fwd 和 torch.cuda.amp.custom_bwd 装饰器。
此外,文件还定义了多个版本的选择性扫描函数(如 selective_scan_easyv2 和 selective_scan_easyv3),这些版本在实现细节上有所不同,可能会针对不同的场景进行优化。
文件的最后部分是一个测试函数 test_selective_scan,使用 pytest 框架对选择性扫描函数进行单元测试。测试中使用了多种参数组合,验证了函数的正确性和性能。
总的来说,这个程序文件实现了一个高效的选择性扫描机制,适用于处理序列数据的深度学习任务,并通过测试确保了其功能的正确性。
10.4 mamba_yolo.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
from einops import rearrange
class LayerNorm2d(nn.Module):
“”"
2D层归一化模块
“”"
def init(self, normalized_shape, eps=1e-6, elementwise_affine=True):
super().init()
# 初始化LayerNorm,normalized_shape为归一化的形状
self.norm = nn.LayerNorm(normalized_shape, eps, elementwise_affine)
def forward(self, x):# 将输入x的形状从 (B, C, H, W) 转换为 (B, H, W, C)x = rearrange(x, 'b c h w -> b h w c').contiguous()# 应用LayerNormx = self.norm(x)# 将输出的形状转换回 (B, C, H, W)x = rearrange(x, 'b h w c -> b c h w').contiguous()return x
class CrossScan(torch.autograd.Function):
“”"
交叉扫描操作
“”"
@staticmethod
def forward(ctx, x: torch.Tensor):
B, C, H, W = x.shape
ctx.shape = (B, C, H, W)
# 创建一个新的张量,存储交叉扫描的结果
xs = x.new_empty((B, 4, C, H * W))
xs[:, 0] = x.flatten(2, 3) # 原始顺序
xs[:, 1] = x.transpose(dim0=2, dim1=3).flatten(2, 3) # 转置后的顺序
xs[:, 2:4] = torch.flip(xs[:, 0:2], dims=[-1]) # 翻转的顺序
return xs
@staticmethod
def backward(ctx, ys: torch.Tensor):B, C, H, W = ctx.shapeL = H * W# 计算反向传播的梯度ys = ys[:, 0:2] + ys[:, 2:4].flip(dims=[-1]).view(B, 2, -1, L)y = ys[:, 0] + ys[:, 1].view(B, -1, W, H).transpose(dim0=2, dim1=3).contiguous().view(B, -1, L)return y.view(B, -1, H, W)
class SelectiveScanCore(torch.autograd.Function):
“”"
选择性扫描核心操作
“”"
@staticmethod
@torch.cuda.amp.custom_fwd
def forward(ctx, u, delta, A, B, C, D=None, delta_bias=None, delta_softplus=False, nrows=1, backnrows=1):
# 确保输入是连续的
if u.stride(-1) != 1:
u = u.contiguous()
if delta.stride(-1) != 1:
delta = delta.contiguous()
if D is not None and D.stride(-1) != 1:
D = D.contiguous()
if B.stride(-1) != 1:
B = B.contiguous()
if C.stride(-1) != 1:
C = C.contiguous()
# 处理输入的维度if B.dim() == 3:B = B.unsqueeze(dim=1)ctx.squeeze_B = Trueif C.dim() == 3:C = C.unsqueeze(dim=1)ctx.squeeze_C = True# 选择性扫描的前向操作out, x, *rest = selective_scan_cuda_core.fwd(u, delta, A, B, C, D, delta_bias, delta_softplus, 1)ctx.save_for_backward(u, delta, A, B, C, D, delta_bias, x)return out@staticmethod
@torch.cuda.amp.custom_bwd
def backward(ctx, dout, *args):u, delta, A, B, C, D, delta_bias, x = ctx.saved_tensorsif dout.stride(-1) != 1:dout = dout.contiguous()# 选择性扫描的反向操作du, ddelta, dA, dB, dC, dD, ddelta_bias, *rest = selective_scan_cuda_core.bwd(u, delta, A, B, C, D, delta_bias, dout, x, ctx.delta_softplus, 1)return (du, ddelta, dA, dB, dC, dD, ddelta_bias, None, None, None, None)
def cross_selective_scan(x: torch.Tensor, x_proj_weight: torch.Tensor, dt_projs_weight: torch.Tensor, A_logs: torch.Tensor, Ds: torch.Tensor, out_norm: torch.nn.Module = None):
“”"
交叉选择性扫描操作
“”"
B, D, H, W = x.shape
D, N = A_logs.shape
K, D, R = dt_projs_weight.shape
L = H * W
# 进行交叉扫描
xs = CrossScan.apply(x)# 进行权重投影
x_dbl = torch.einsum("b k d l, k c d -> b k c l", xs, x_proj_weight)
dts, Bs, Cs = torch.split(x_dbl, [R, N, N], dim=2)
dts = torch.einsum("b k r l, k d r -> b k d l", dts, dt_projs_weight)# HiPPO矩阵
As = -torch.exp(A_logs.to(torch.float)) # (k * c, d_state)
Bs = Bs.contiguous()
Cs = Cs.contiguous()
Ds = Ds.to(torch.float) # (K * c)# 选择性扫描
ys: torch.Tensor = SelectiveScanCore.apply(xs, dts, As, Bs, Cs, Ds)
return ys
class SS2D(nn.Module):
“”"
2D选择性扫描模块
“”"
def init(self, d_model=96, d_state=16, ssm_ratio=2.0, ssm_rank_ratio=2.0):
super().init()
self.d_model = d_model
self.d_state = d_state
self.ssm_ratio = ssm_ratio
self.ssm_rank_ratio = ssm_rank_ratio
# 输入投影层self.in_proj = nn.Conv2d(d_model, int(ssm_ratio * d_model), kernel_size=1)# 输出投影层self.out_proj = nn.Conv2d(int(ssm_ratio * d_model), d_model, kernel_size=1)def forward(self, x: torch.Tensor):# 前向传播x = self.in_proj(x)x = cross_selective_scan(x, self.x_proj_weight, self.dt_projs_weight, self.A_logs, self.Ds)x = self.out_proj(x)return x
class VSSBlock_YOLO(nn.Module):
“”"
YOLO模型中的VSSBlock模块
“”"
def init(self, in_channels: int, hidden_dim: int):
super().init()
self.proj_conv = nn.Conv2d(in_channels, hidden_dim, kernel_size=1)
self.ss2d = SS2D(d_model=hidden_dim)
def forward(self, input: torch.Tensor):input = self.proj_conv(input) # 投影x = self.ss2d(input) # 选择性扫描return x
代码说明
LayerNorm2d: 实现了2D层归一化,适用于图像数据。
CrossScan: 实现了交叉扫描操作,前向传播和反向传播均定义。
SelectiveScanCore: 实现了选择性扫描的核心功能,包含前向和反向传播。
cross_selective_scan: 结合交叉扫描和选择性扫描的操作。
SS2D: 2D选择性扫描模块,包含输入和输出投影层。
VSSBlock_YOLO: YOLO模型中的VSSBlock模块,整合了投影和选择性扫描。
这些模块和功能构成了深度学习模型中的关键部分,尤其是在处理图像数据时。
这个程序文件 mamba_yolo.py 是一个用于实现 YOLO(You Only Look Once)目标检测模型的 PyTorch 代码。文件中定义了多个类和函数,主要用于构建模型的不同模块,包括层归一化、卷积、选择性扫描等。以下是对代码的详细说明。
首先,文件导入了一些必要的库,包括 torch、math、functools 和 torch.nn 等,后者用于构建神经网络层。还使用了 einops 库来进行张量的重排和重复操作,timm.layers 中的 DropPath 用于实现随机丢弃路径的功能。
接下来,定义了一个 LayerNorm2d 类,它是对二维数据进行层归一化的实现。其 forward 方法将输入张量的维度从 (batch, channels, height, width) 转换为 (batch, height, width, channels),然后进行归一化处理,最后再转换回原来的维度。
autopad 函数用于根据卷积核的大小自动计算填充量,以确保输出形状与输入形状相同。
接下来的 CrossScan 和 CrossMerge 类实现了交叉扫描和交叉合并的功能,这些操作对于处理特征图的不同维度和方向非常重要。它们的 forward 和 backward 方法定义了前向传播和反向传播的计算过程。
SelectiveScanCore 类实现了选择性扫描的核心功能,提供了前向和反向传播的计算方法。选择性扫描是一种高效的计算方法,用于处理序列数据。
cross_selective_scan 函数是一个高层次的接口,用于执行选择性扫描操作,接受多个输入参数并返回处理后的输出。
SS2D 类是一个主要的模块,结合了选择性扫描和卷积操作。它的构造函数定义了多个参数,包括模型的维度、状态维度、卷积层的参数等。forward 方法实现了前向传播的逻辑,结合了输入投影、卷积和选择性扫描的操作。
RGBlock 和 LSBlock 类实现了残差块和层次块的功能,分别用于构建模型的不同部分。它们包含了卷积层、激活函数和丢弃层。
XSSBlock 和 VSSBlock_YOLO 类是 YOLO 模型的关键模块,结合了多个子模块以实现复杂的特征提取和处理。它们的构造函数中定义了输入和输出的维度、激活函数、丢弃率等参数,并在 forward 方法中实现了具体的前向传播逻辑。
SimpleStem 类是模型的输入处理模块,负责将输入图像通过卷积层进行特征提取。
最后,VisionClueMerge 类用于合并不同特征图的输出,以便于后续的处理。
整体来看,这个文件实现了一个复杂的神经网络结构,结合了多种技术以提高目标检测的性能。通过使用选择性扫描、残差连接和多种卷积操作,模型能够有效地提取和处理图像特征。
注意:由于此博客编辑较早,上面“10.YOLOv11核心改进源码讲解”中部分代码可能会优化升级,仅供参考学习,以“11.完整训练+Web前端界面+200+种全套创新点源码、数据集获取”的内容为准。
源码文件
源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻