【机械臂运动学基础】变换矩阵
目录
一、坐标系的旋转和移动
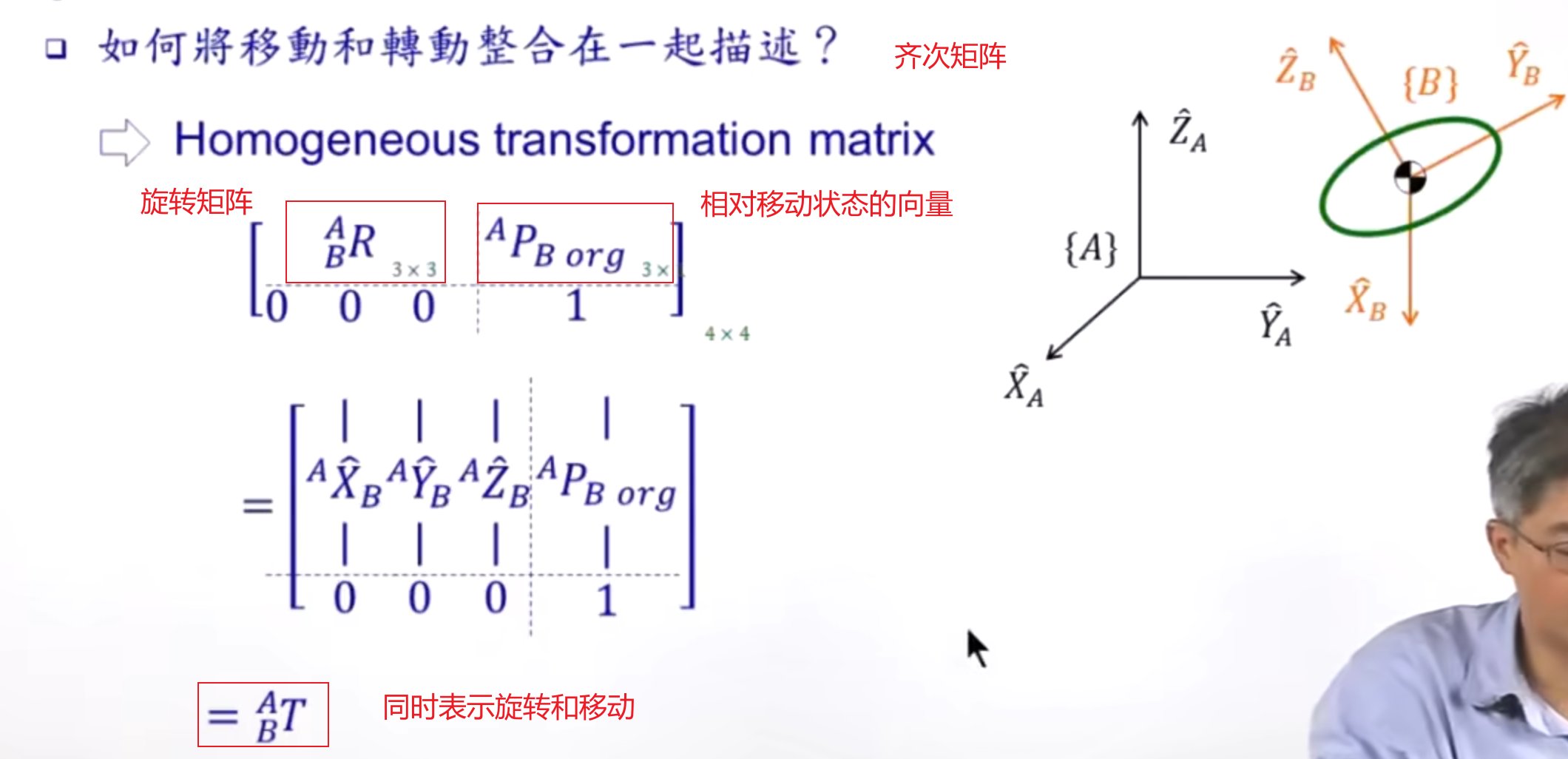
1.1 同时表达旋转和移动
1.1.1 用法
1.1.2 证明过程
1.1.3 例题
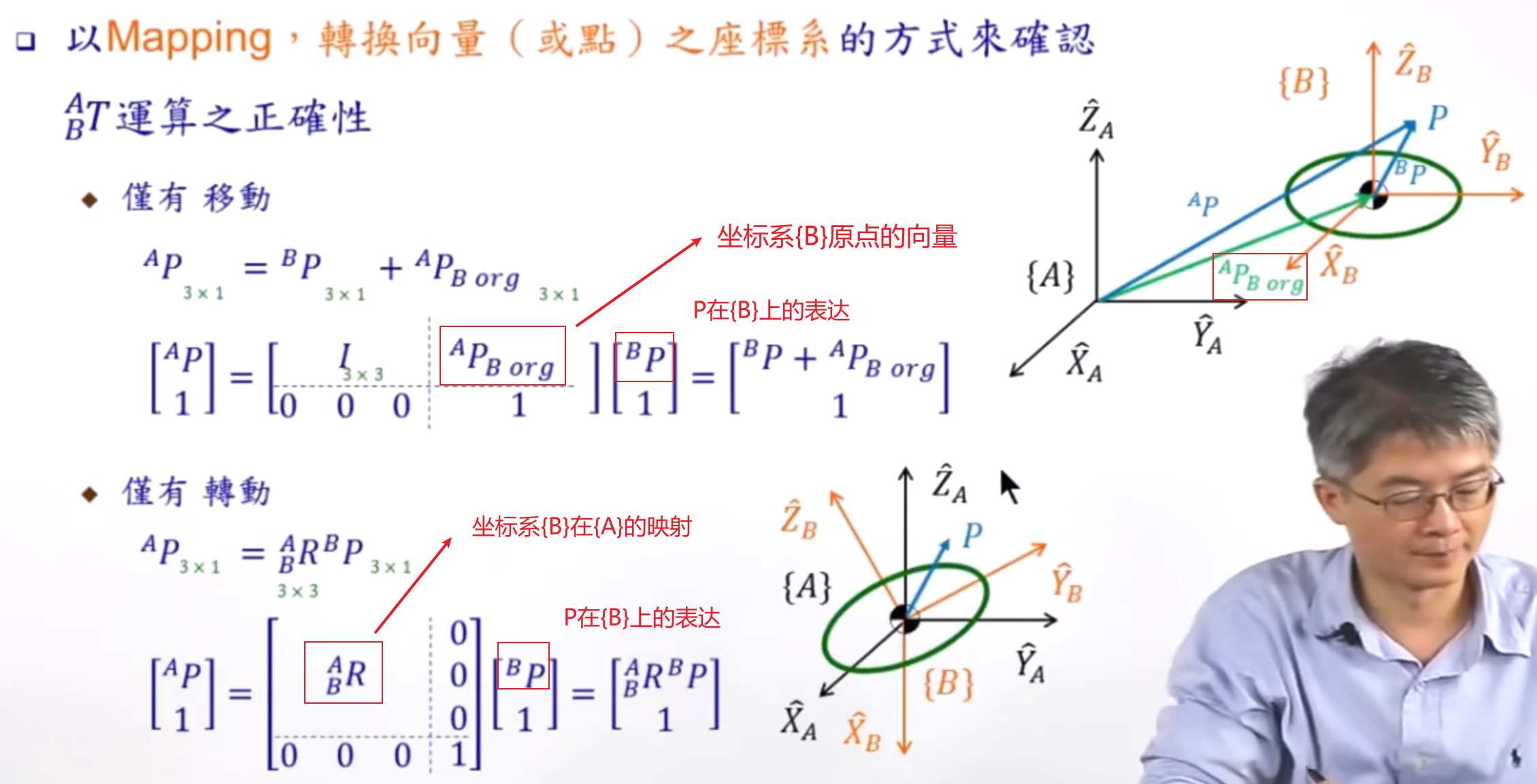
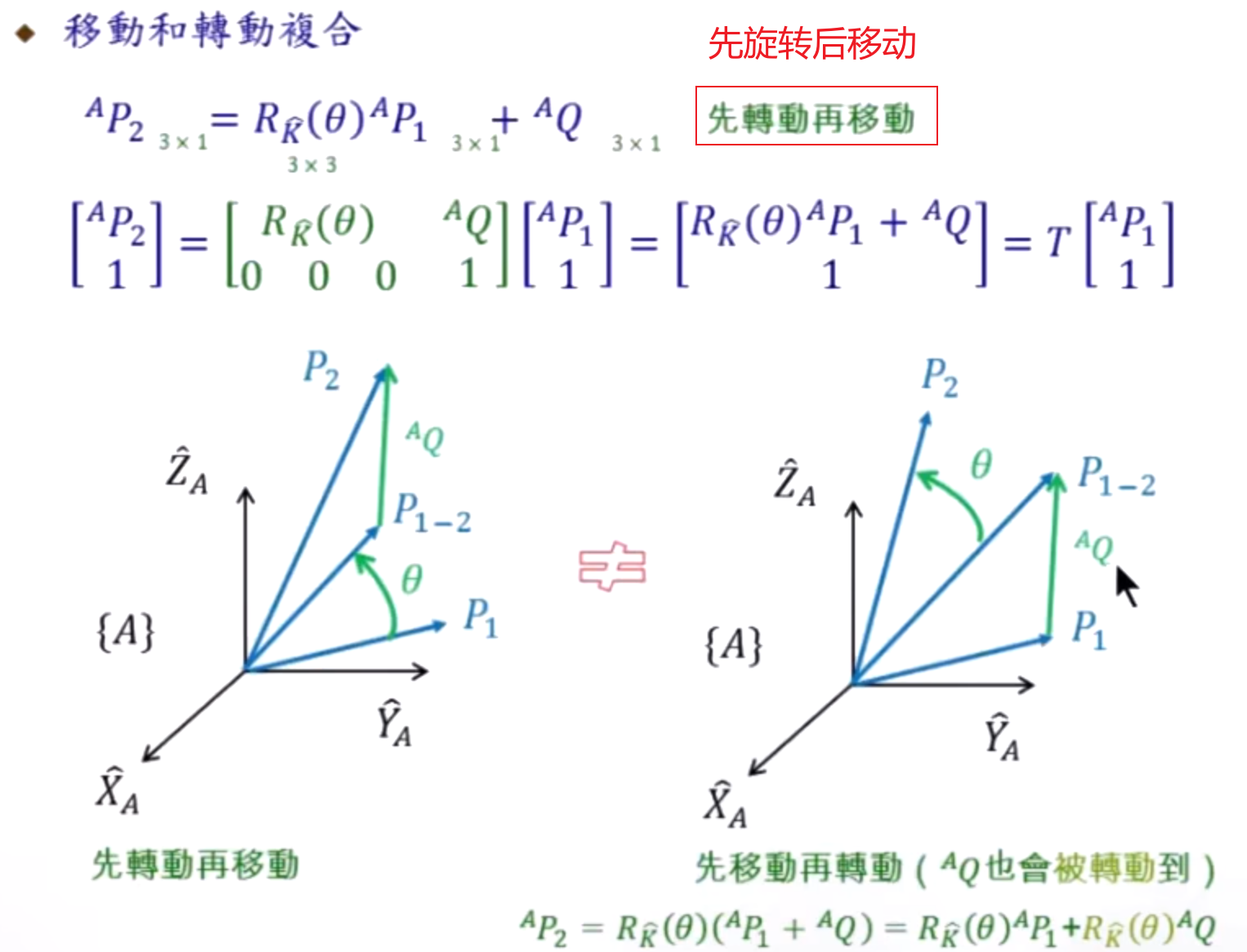
1.2 基于向量同时表达旋转和移动
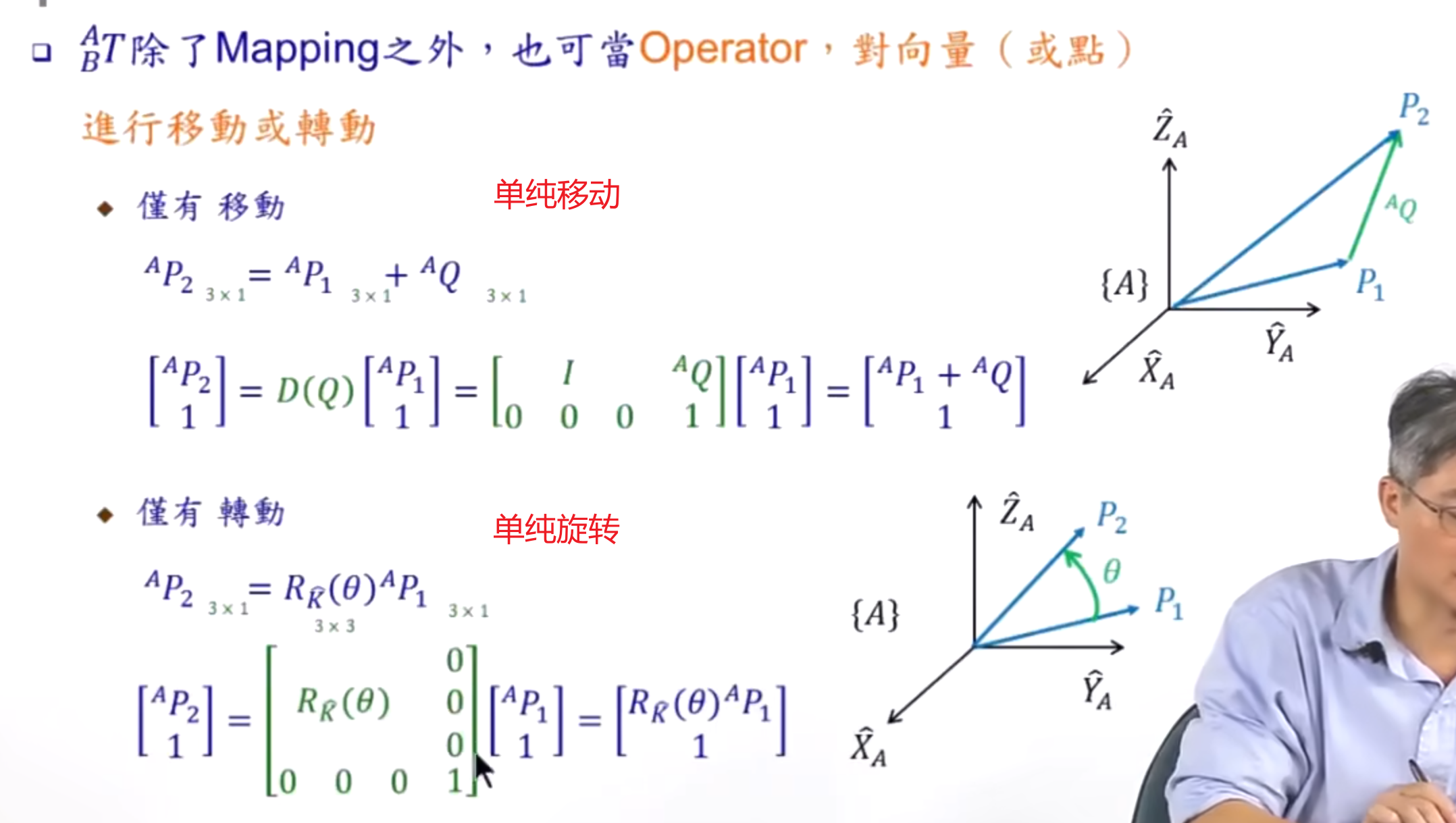
1.2.1 用法
1.2.2 证明过程
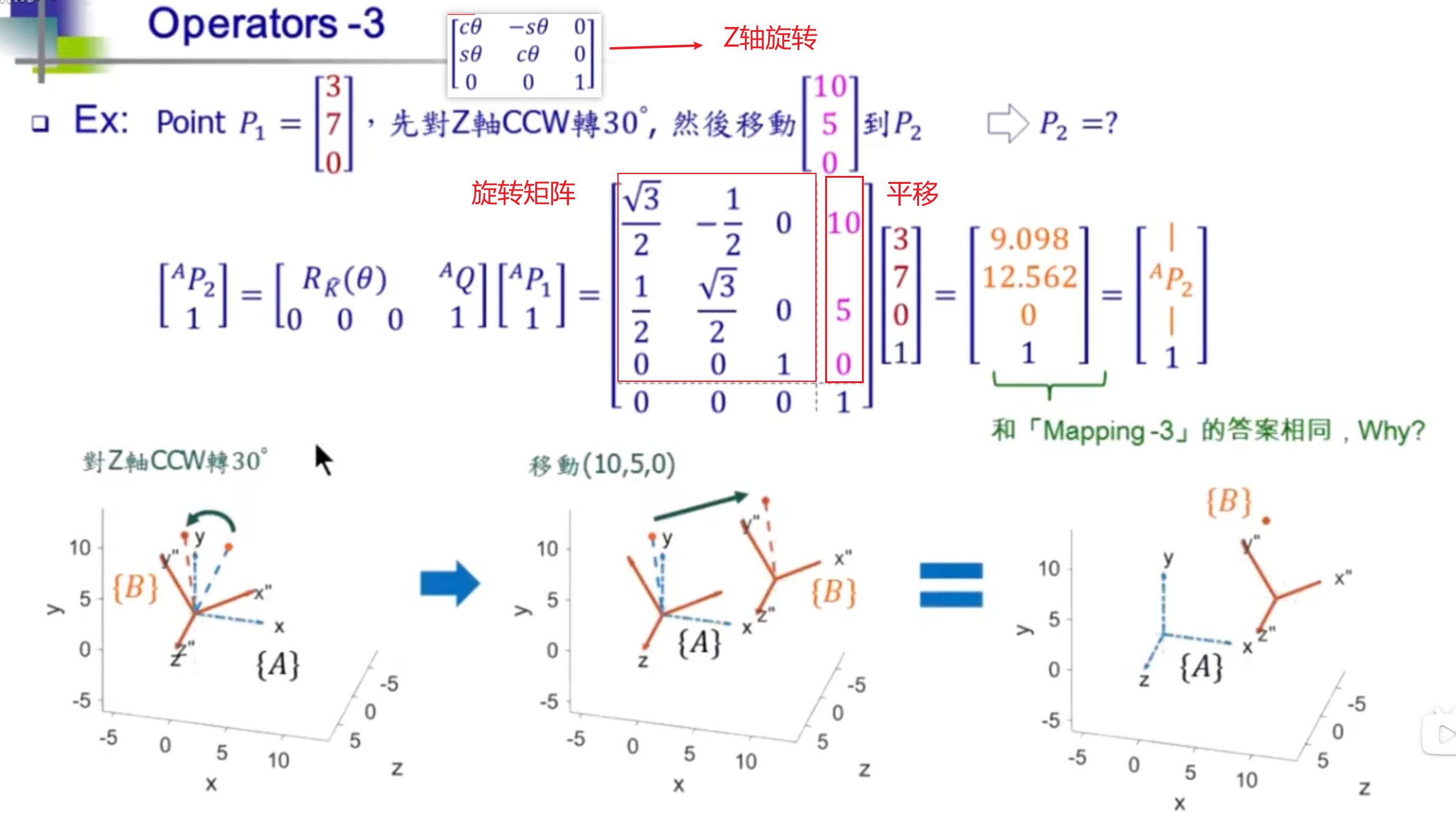
1.2.3 例题
1.3 多个坐标系的转换
1.3.1 用法
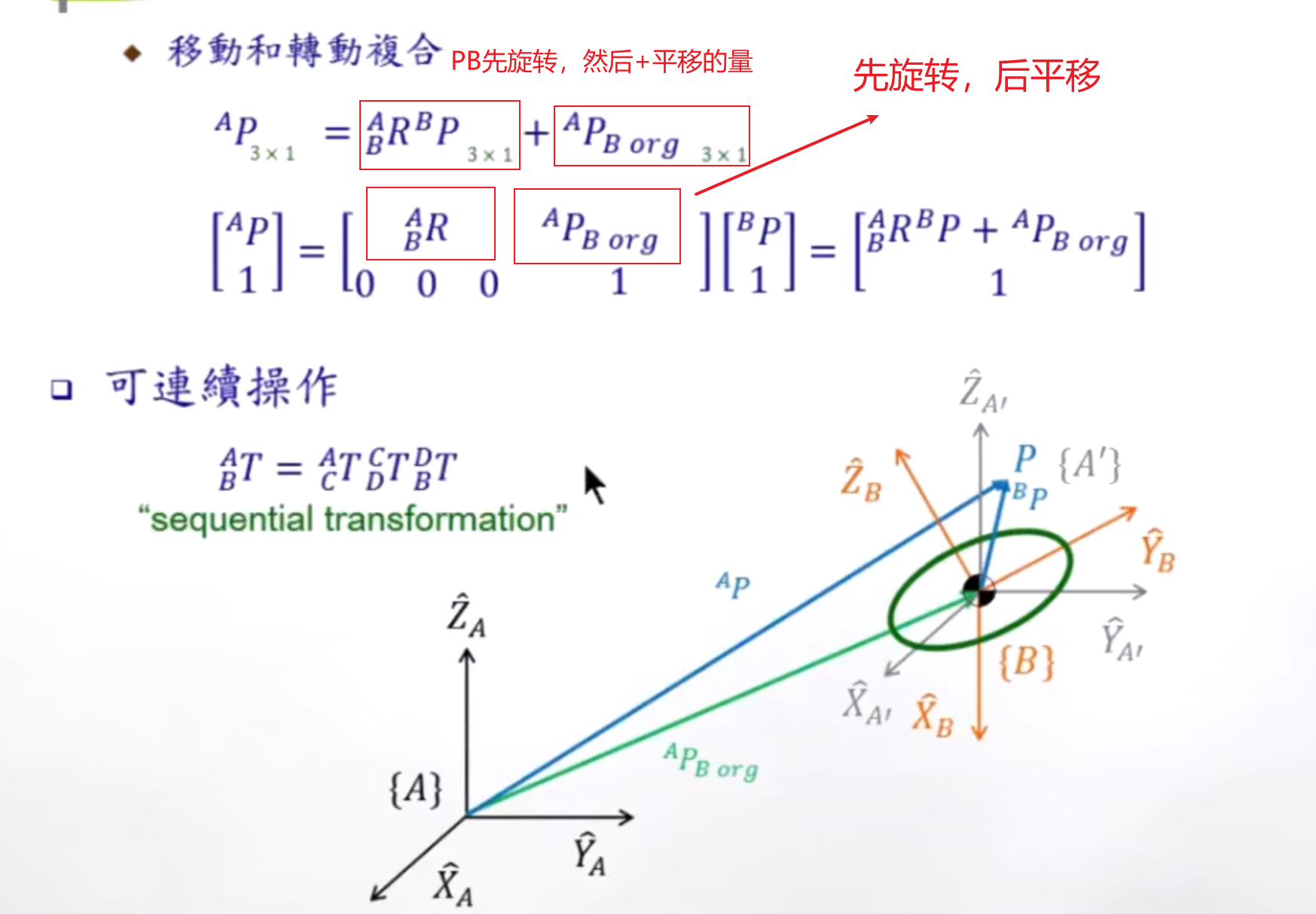
1.3.2 连续变换
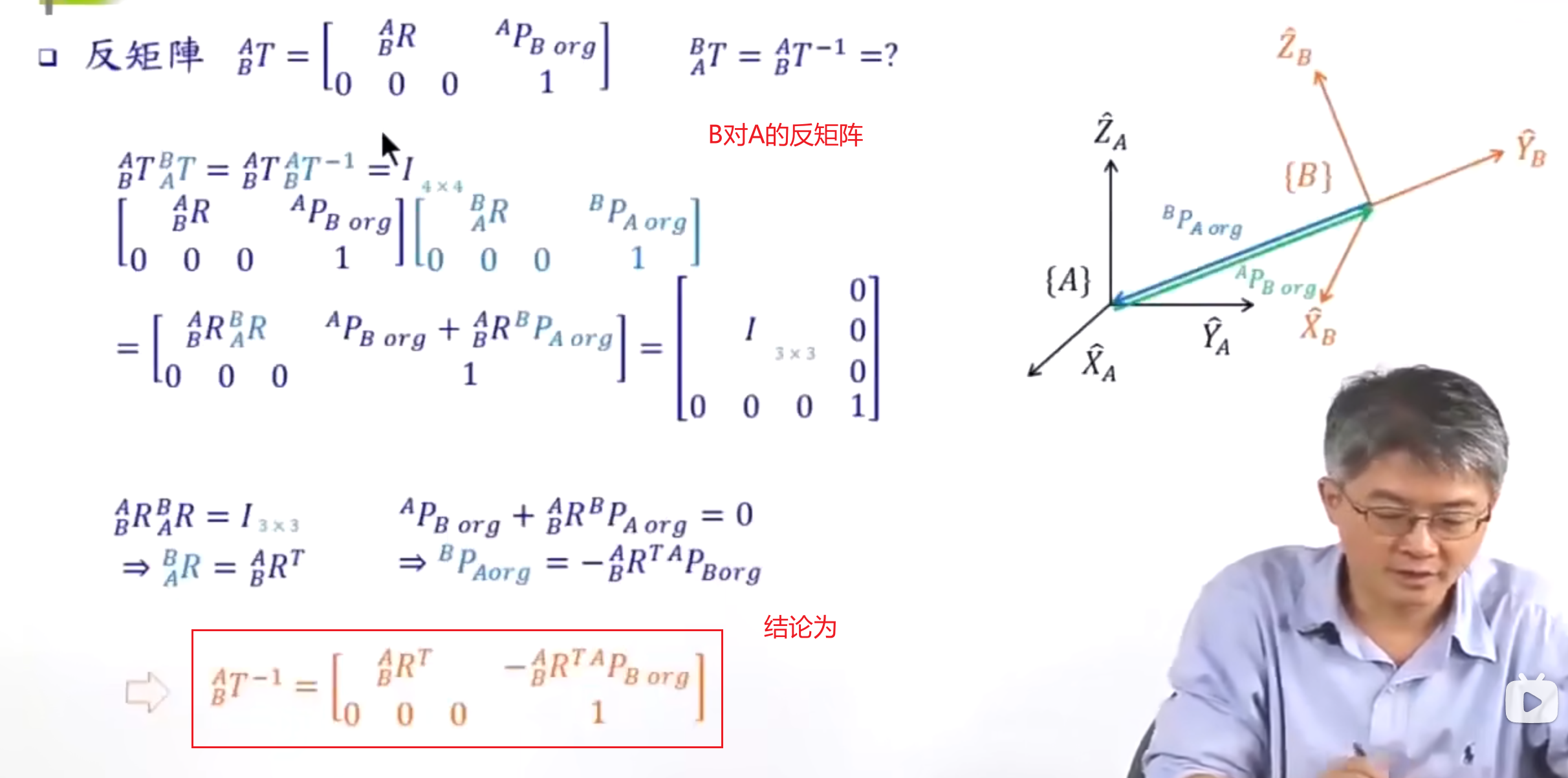
1.3.3 反矩阵
一、坐标系的旋转和移动
1.1 同时表达旋转和移动
1.1.1 用法
1.1.2 证明过程
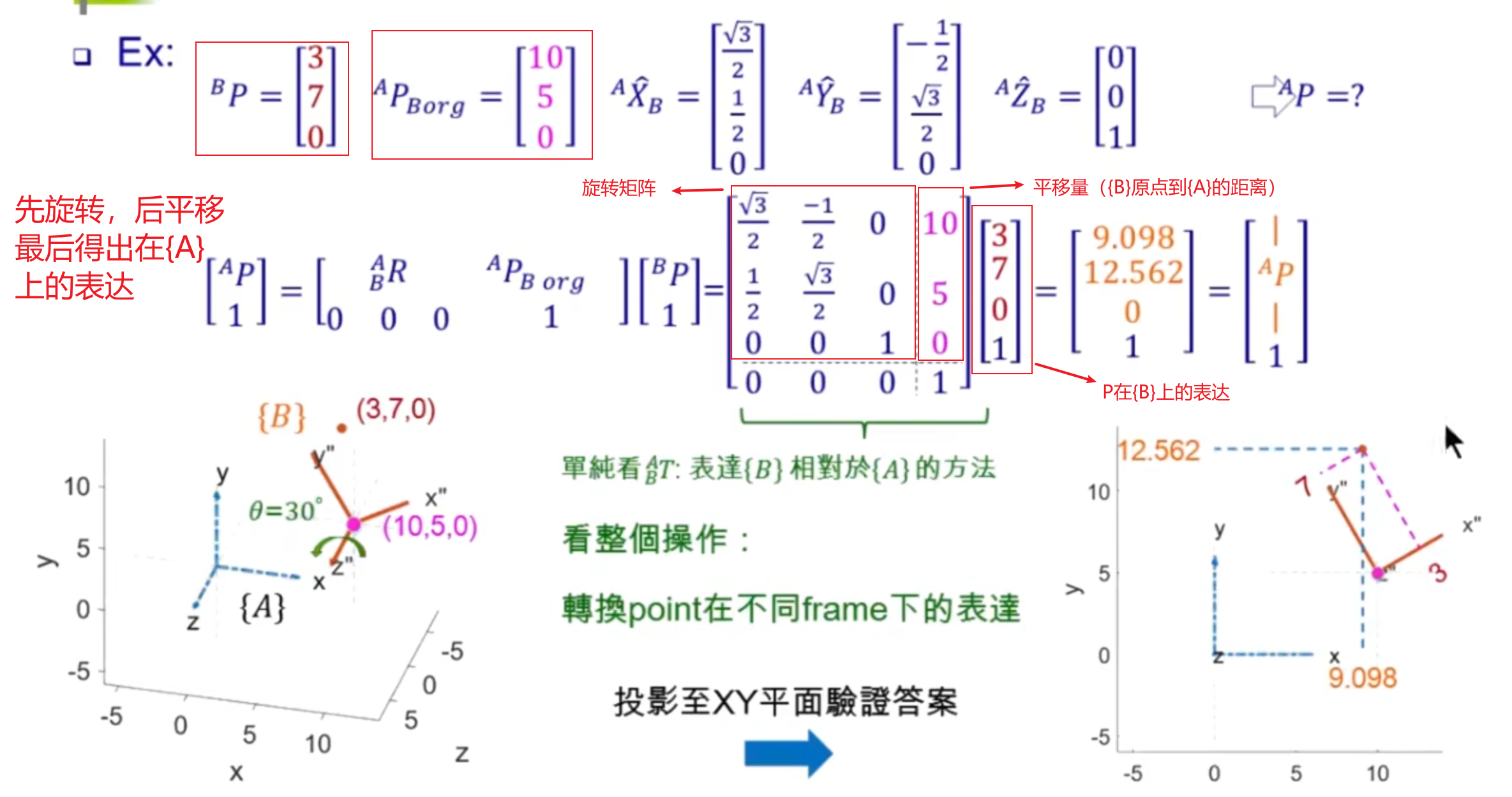
1.1.3 例题
1.2 基于向量同时表达旋转和移动
1.2.1 用法
1.2.2 证明过程
1.2.3 例题
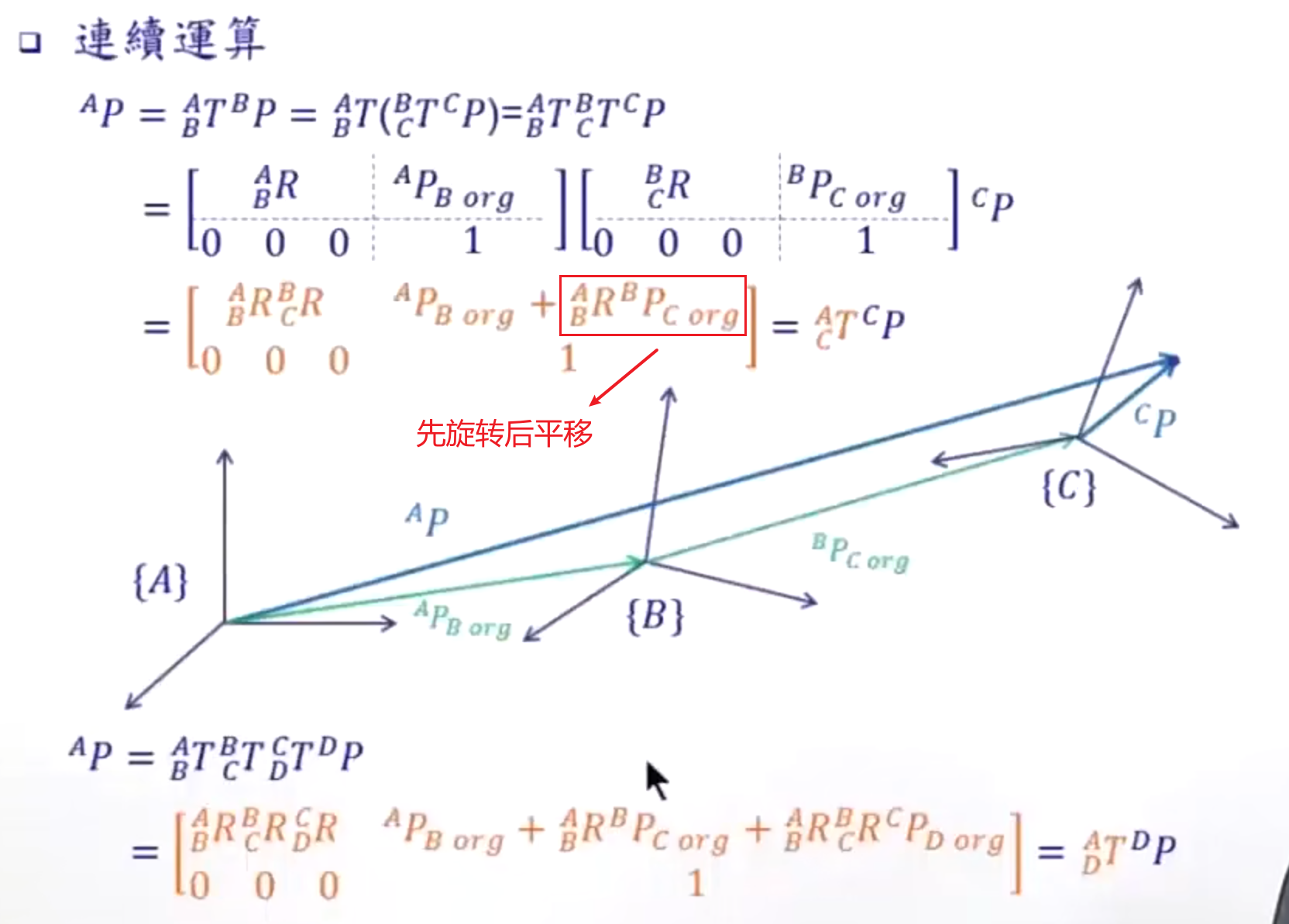
1.3 多个坐标系的转换
1.3.1 用法


1.3.2 连续变换
1.3.3 反矩阵