普蓝机器人PlanRobot-DR200:基于多传感融合的全天候电力巡检自主导航技术与实践

⚡ 普蓝机器人DR200:让电力巡检进入全天候自主时代
🏗️ 背景与挑战
随着电力系统规模的不断扩大和智能电网建设的持续深入,传统人工巡检方式已难以满足现代电力运维对效率、安全性与精确性的要求。
高温、高压、复杂地形以及昼夜环境变化,使得人工巡检面临极高的安全风险与成本压力。
为实现无人化、智能化巡检,自动驾驶机器人底盘技术应运而生。

🤖 DR200 自动驾驶机器人底盘简介
PlanRobot-DR200 自动驾驶机器人底盘是新一代智能移动巡检平台,具备自主导航、环境感知、避障决策、实时监控与远程管理能力,正逐步成为电力巡检场景中的核心装备。
DR200 集成了多传感融合与智能决策系统,实现复杂环境下的全天候自动驾驶和精准作业。
🧩 系统总体架构
DR200 采用 四轮独立驱动、差速转向、电动驱动的智能底盘结构,由以下四大系统组成:
1️⃣ 运动控制系统(Motion Control System)
2️⃣ 感知系统(Perception System)
3️⃣ 决策与规划系统(Decision & Planning System)
4️⃣ 通信与监控系统(Communication & Monitoring System)

🧭 自主导航技术原理
自主导航(Autonomous Navigation)是机器人智能巡检的核心能力。
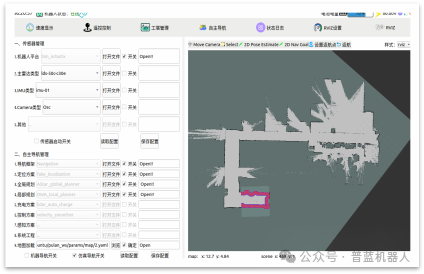
DR200 通过 多传感器融合定位 与 SLAM 建图算法,实现无人工干预的实时定位与路径规划。
(1)多传感器融合定位
融合 RTK-GPS、IMU、编码器 与 激光雷达(LiDAR)数据,提升定位精度与鲁棒性。
(2)SLAM 建图与路径规划
采用 激光雷达+视觉融合 SLAM,实现同步建图与定位。
机器人可在陌生或动态环境中自主构建环境地图并规划最优路径。
🚧 避障与路径决策系统
在复杂电力场景中,避障能力是机器人稳定运行的关键。
静态避障:基于激光雷达与深度相机进行三维环境建模;
动态避障:通过视觉跟踪算法实现预测性避障与动态绕行。
这种多层感知机制确保 DR200 在复杂地形与动态环境下仍能稳定、安全地运行。
📸 深度相机与视觉感知
深度相机在三维结构识别、表面缺陷检测、夜间识别与目标分类中发挥重要作用。
通过视觉算法,DR200 能精准识别电力设备、线路支架及安全隐患。
☁️ 实时监控与云端运维
借助 5G 通信模块,DR200 可实时上传巡检数据至云端,实现:
边缘计算与智能调度
云端任务规划与日志回放
异常告警与远程诊断
这让运维人员可随时掌握机器人状态,实现“云上巡检”的智能管理。
🌙 全天候自主运行机制
面对昼夜交替、高温高湿等复杂工况,DR200 通过:
多模态感知融合
环境适应算法
智能能量管理系统(BMS)
实现真正的全天候、全环境稳定运行。
🧠 运维安全与人机协同
DR200 具备多层安全机制:
物理防护层:防撞、防尘、防水设计
控制算法层:防失控与冗余保护
软件监控层:实时健康监测与状态反馈
支持 自主、半自动、远程控制 三种模式,实现灵活高效的人机协同。
📊 数据集构建与视觉算法优化
在仓储与电力场景下,为识别路面水渍、油污等风险障碍:
数据采集:采集不同光照、地面材质下的多类型水渍图像;
数据标注:使用 LabelMe、VGG Image Annotator 精确标注区域坐标;
算法训练:基于深度学习模型,实现高精度识别与避障策略优化。

🚀 应用成效
✅ 巡检效率提升 3~5 倍
✅ 定位与检测精度达 厘米级
✅ 安全风险降低 90% 以上
DR200 以其自主导航能力、智能决策算法与安全可靠设计,为电力巡检行业带来了革命性变革。
🔮 未来
随着智能电网的持续建设,DR200 将在更多场景中发挥作用,成为智慧电网巡检的重要支撑平台,推动电力运维迈向无人化、智能化的新阶段。