CS50ai: week2 Uncertainty我的笔记B版:一口气从“爬山”到“退火”, 优化与CSP超好懂入门
写给零基础但想快速上手 AI 里“选最优”的你。轻松点儿看,但招儿都很正。
前言:为什么你会卡在“小山包”上?
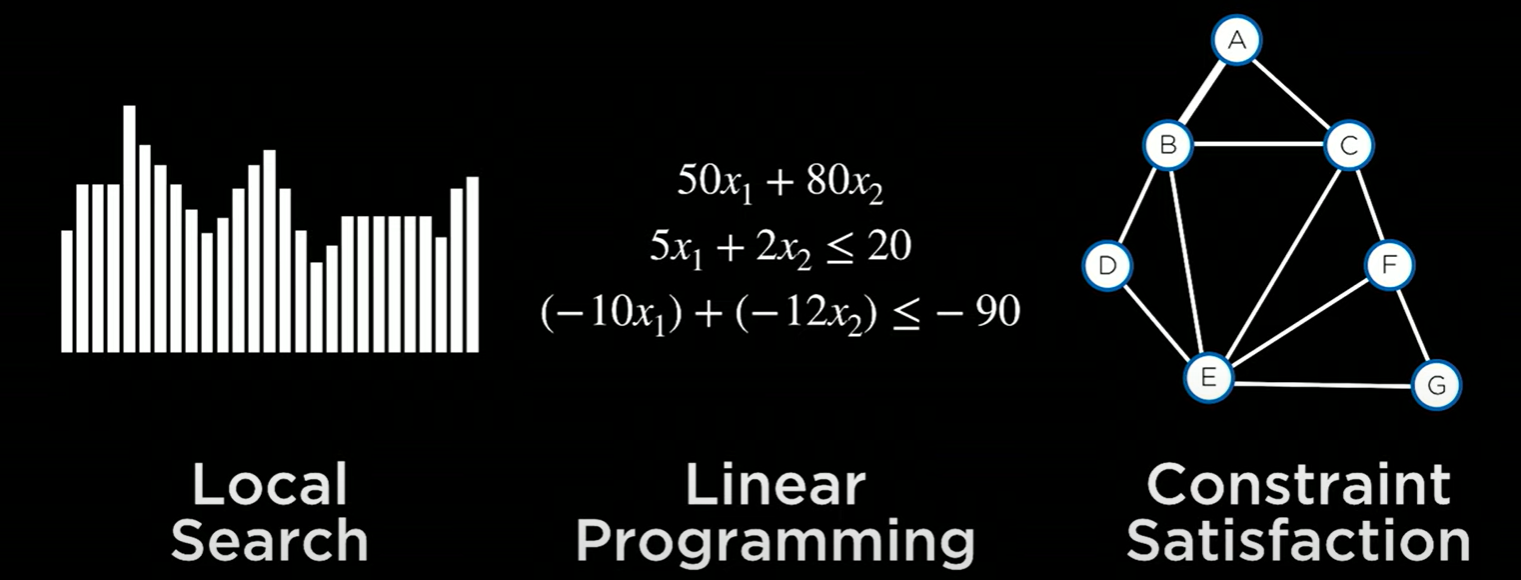
很多 AI 问题的核心不在于“怎么走”,而在于“哪儿最好”。比如:医院建在哪最省路?快递员走哪条环线最短?课程考试怎么排才不撞车?这类优化问题共同点是:从一堆可行方案里挑“最好”的那个。今天我们用一篇小教程,把局部搜索(local search)、模拟退火(simulated annealing)、**线性规划(LP)和约束满足问题(CSP)**串起来,既讲直觉,也给你能落地的伪代码与实战心法。
1)局部搜索:只带一个状态就出门的“轻装派”
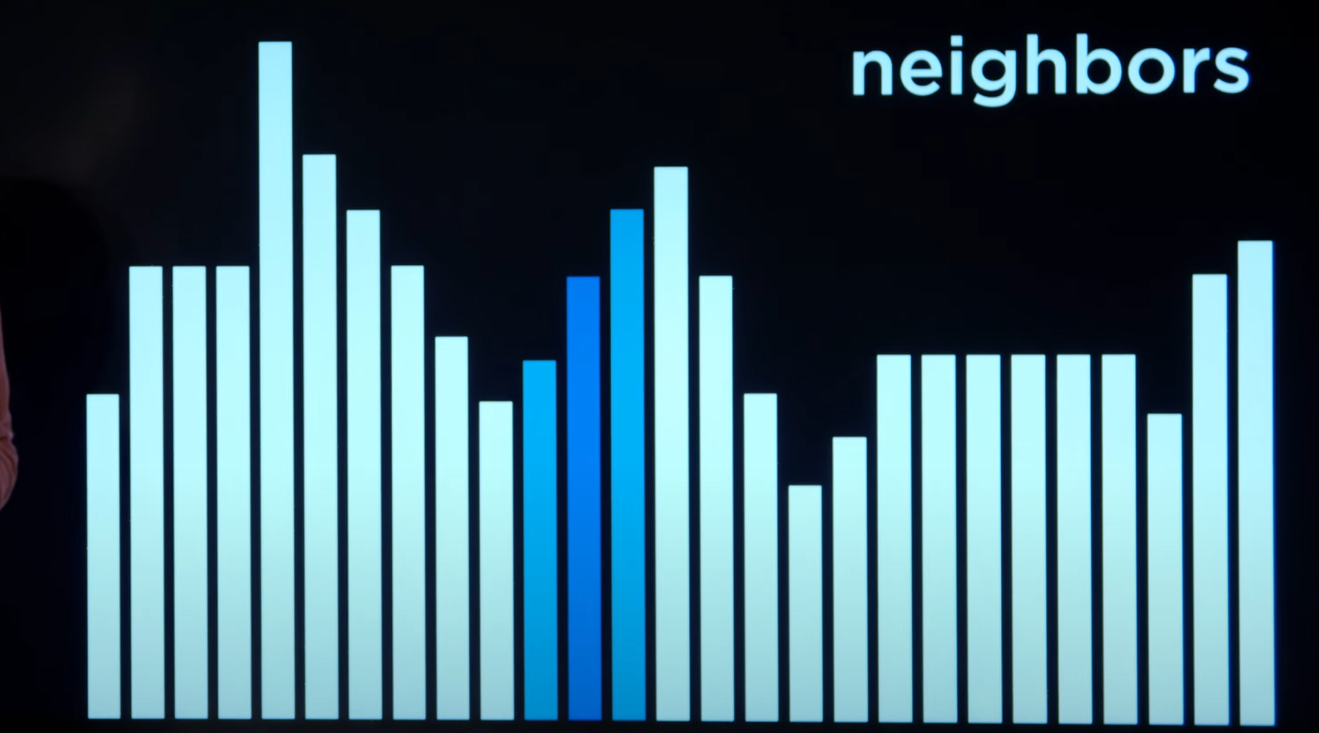
状态空间地形(state-space landscape)
把每个可行状态画成一根柱子,高度 = 目标函数值(要最大化时)或代价函数值(要最小化时)。我们的任务是找到全局最优:最高峰(或最低谷)。局部搜索的做法很“近视眼”——只维护一个当前状态,再在它的邻居里挑更好的,向左一步或向右一步,慢慢爬。
爬山算法(Hill Climbing)
想最大化就每次选更高的邻居;想最小化就每次选更低的邻居;若无更好邻居就停。
HILL-CLIMB(problem):current ← initial_state(problem) # 随机也行loop:neighbor ← best_neighbor(current) # 最大化选最高;最小化选最低if value(neighbor) ≤ value(current): return current # 没更好就收工current ← neighbor
常见坑
-
局部最优:卡在小山包(local maxima/minima)
-
平台(plateau):一片平的,不知道往哪走
-
肩部(shoulder):虽不是最优,但短期内不变好
变体小抄
-
最陡上升:每次选“最最好”的邻居(贪心)
-
随机/首选上升:只要更好就跳,省评估
-
随机重启:换多个随机起点,多跑几次取最好
-
局部束搜索(beam):同时保留前 k 个最好状态
这些都在缓解“卡局部最优”的风险。
2)模拟退火:允许“变差”才能走到更好
纯爬山永远不往下走,注定可能错过更高峰。**模拟退火(SA)**借鉴物理退火:一开始“温度高”允许偶尔接收更差邻居(以概率),之后温度逐步降低,变得保守。
核心规则(以最大化为例):
-
若 ΔE = value(neighbor) − value(current) > 0:必接收
-
若 ΔE ≤ 0:以概率
exp(ΔE / T)接收(T 为温度)
SIMULATED-ANNEALING(problem, max_iter):current ← initial_state(problem)for t = 1..max_iter:T ← temperature(t) # 逐步下降,如 T0 * α^t 或 T0/(1+kt)neighbor ← random_neighbor(current)ΔE ← value(neighbor) - value(current)if ΔE > 0:current ← neighborelse with probability exp(ΔE / T):current ← neighborreturn current
什么时候用?
-
地形“坑坑洼洼”局部最优多:如**旅行商问题(TSP)**用“2-opt”邻域(交换两条边)常配 SA 作为近似法。
3)线性规划(LP):当目标和约束都“线性”
问题形态
最小化 c^T x,满足
-
线性不等式:
Ax ≤ b(或等式A_eq x = b_eq) -
变量界:
ℓ ≤ x ≤ u
例子:两台机器 x1/x2,费用最小;受限于劳动力和产出需求。能用 SciPy linprog 一步搞定(算法底层常用单纯形或内点法)。当你的目标/约束都是线性的,优先考虑 LP——它是有“成熟工业级解法”的。
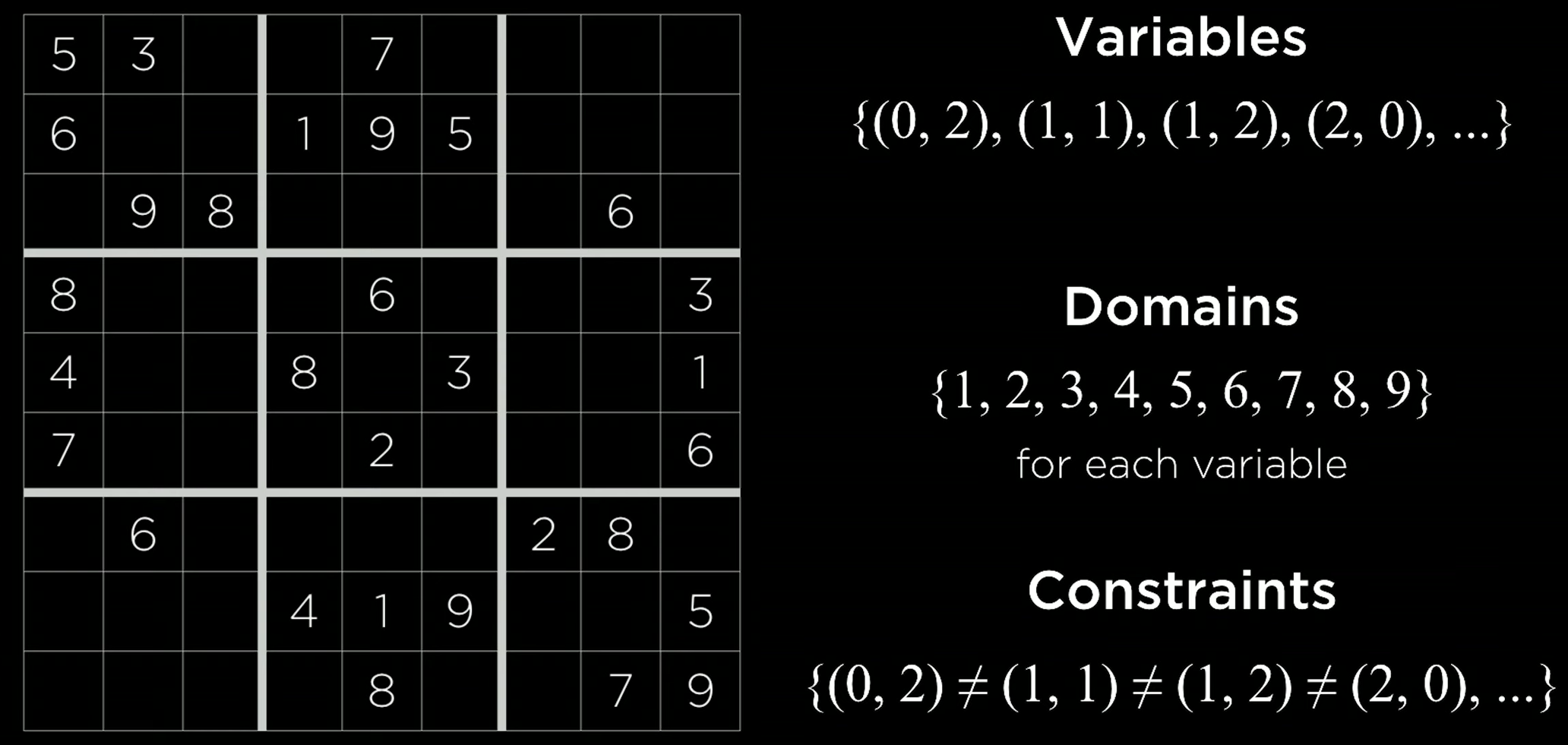
4)约束满足问题(CSP):变量、取值与“不许这样”
定义
-
变量集合:
{X1, …, Xn} -
每个变量的域(可取值):
{D1, …, Dn} -
约束集合:对变量取值的限制(等于/不等/相邻不同等)
硬/软约束
-
硬约束:必须满足(如同一学生一天不能两门考试)
-
软约束:更像偏好,满足越多越优
一元/二元约束
-
一元:只涉及一个变量(如
A ≠ Mon) -
二元:涉及两个变量(如
A ≠ B)
一致性:先削域再搜索,省大力气
-
节点一致性(Node Consistency):域内每个值都满足一元约束 → 不合法的值直接删
-
弧一致性(Arc Consistency):对弧
(X, Y),保证 X 的每个值 在 Y 的域 中都有搭档可满足二元约束;没有就从 X 的域删掉
REVISE 与 AC-3 伪代码(删不合法的域值):
REVISE(csp, X, Y):revised ← falsefor x in Domain(X):if ∄ y in Domain(Y) s.t. constraint(X, Y) satisfied:delete x from Domain(X)revised ← truereturn revisedAC-3(csp):Q ← all arcs (X, Y) in cspwhile Q not empty:(X, Y) ← pop(Q)if REVISE(csp, X, Y):if Domain(X) = ∅: return falsefor each Z in Neighbors(X) - {Y}:push (Z, X) into Qreturn true
小例:考试排程(课程 A–G,域是 Mon/Tue/Wed,约束是同学选的课不能同日),AC-3 能大幅缩小各课的可行日期,后面的搜索就容易多了。
5)把 CSP 当搜索:回溯 + 推理 = 实用解法
朴素回溯(Backtracking)
不断给未赋值变量尝试一个值;若违背约束则回退换值。
BACKTRACK(assignment, csp):if assignment complete: return assignmentX ← SELECT-UNASSIGNED-VAR(assignment, csp)for v in ORDERED-DOMAIN-VALUES(X, assignment, csp):if consistent(X=v, assignment, csp):add X=v to assignmentresult ← BACKTRACK(assignment, csp)if result ≠ failure: return resultremove X=v from assignmentreturn failure
让搜索“更聪明”的三板斧
-
保持弧一致性(MAC):每次新赋值后立刻跑一次 AC-3,把“不可能”的域值提前剪掉。
-
选变量(变量排序)
-
MRV(最少剩余值):先选域最小的变量,尽早发现死路;
-
度启发式:若并列,选度最高(约束最多)的变量,能更快缩小其他域。
-
-
选值(值排序)
-
最少约束值(LCV):优先尝试排除他人可能性最少的值,给后续“留活路”。
-
实战感受:MRV + 度启发式 + LCV + MAC 的组合,能让原本“回溯爆炸”的问题,秒变顺滑。考试排程、数独等都能明显受益。
Optimization - Lecture 3 - CS50…
6)用哪一个?一张对照表
| 你的问题长这样 | 建议首选 | 说明 |
|---|---|---|
| 只关心最终解,不在乎路径;邻域好定义 | 爬山 / 随机重启 | 快速、易实现;但可能卡局部最优 |
| 地形多坑、易卡局部最优 | 模拟退火 | 早期敢“变差”,后期稳;调好温度很关键 |
| 目标/约束全是线性的实数 | 线性规划(LP) | 工业级算法(单纯形/内点),稳准狠 |
| 变量离散、约束繁多(排程/拼图/数独…) | CSP(回溯+MAC+启发式) | “先削域再搜索”,大幅提效 |
7)易错与复盘清单
-
邻域没定义清楚:局部搜索先把“邻居”定义严谨(TSP 常用 2-opt/3-opt)。
-
目标/代价混用:最大化就用“目标函数”,最小化就用“代价函数”,别混。
-
退火温度表太激进:降温太快=变成爬山;太慢=效率低。用指数或线性退火做 baseline。
-
CSP 不先一致化:不做 AC-3 就硬回溯,常常平白多 10× 的搜索量。
-
忽略启发式:MRV/度/LCV 是“白拿”的效率红利。
注意:该文章为ai根据cs50ai视频与我的笔记生成,因逻辑清晰且更具阅读性而发布,仅供学习参考