ros2—交叉编译ros bridge自定义消息
拉取ros bridge
git clone https://github.com/ros2/ros1_bridge.git
这里根据目标的ros2版本,切相应分支,目前我用的是foxy版本
git checkout foxy
编译ros1自定义消息
ros1编译操作在bridge根目录执行
创建ROS1工作区
mkdir catkin_ws
catkin_init_workspace
cd catkin_ws
mkdir src
cd src
catkin_create_pkg custom_msgs std_msgs message_generation创建自定义消息内容
custom_msgs/msg/MotCmd.msg
# type: 1 on MoveL, 2 on MoveR, 3 on MoveCint64 type
Pose[] pose_arr
float64 velocity
float64 acceleration
custom_msgs/msg/Pose.msg
float64 x
float64 y
float64 z
float64 qw
float64 qx
float64 qy
float64 qz
custom_msgs/msg/ShapeBox.msg
Pose center
float64 l
float64 w
float64 hcustom_msgs/srv/PlannerPlanPath.srv
Pose start_pose
Pose target_pose
ShapeBox robot
ShapeBox[] env
---
int64 error_code
MotCmd[] cmd_arr
更改CMakeLists.txt 和package.xml
custom_msgs/CMakeLists.txt
cmake_minimum_required(VERSION 3.0.2)
project(custom_msgs)## Compile as C++11, supported in ROS Kinetic and newer
# add_compile_options(-std=c++11)## Find catkin macros and libraries
## if COMPONENTS list like find_package(catkin REQUIRED COMPONENTS xyz)
## is used, also find other catkin packages
find_package(catkin REQUIRED COMPONENTSmessage_generationstd_msgs
)## System dependencies are found with CMake's conventions
# find_package(Boost REQUIRED COMPONENTS system)## Uncomment this if the package has a setup.py. This macro ensures
## modules and global scripts declared therein get installed
## See http://ros.org/doc/api/catkin/html/user_guide/setup_dot_py.html
# catkin_python_setup()################################################
## Declare ROS messages, services and actions ##
################################################## To declare and build messages, services or actions from within this
## package, follow these steps:
## * Let MSG_DEP_SET be the set of packages whose message types you use in
## your messages/services/actions (e.g. std_msgs, actionlib_msgs, ...).
## * In the file package.xml:
## * add a build_depend tag for "message_generation"
## * add a build_depend and a exec_depend tag for each package in MSG_DEP_SET
## * If MSG_DEP_SET isn't empty the following dependency has been pulled in
## but can be declared for certainty nonetheless:
## * add a exec_depend tag for "message_runtime"
## * In this file (CMakeLists.txt):
## * add "message_generation" and every package in MSG_DEP_SET to
## find_package(catkin REQUIRED COMPONENTS ...)
## * add "message_runtime" and every package in MSG_DEP_SET to
## catkin_package(CATKIN_DEPENDS ...)
## * uncomment the add_*_files sections below as needed
## and list every .msg/.srv/.action file to be processed
## * uncomment the generate_messages entry below
## * add every package in MSG_DEP_SET to generate_messages(DEPENDENCIES ...)## Generate messages in the 'msg' folderadd_message_files(FILESMotCmd.msgPose.msgShapeBox.msg)## Generate services in the 'srv' folder
add_service_files(FILESPlannerPlanPath.srv
)## Generate actions in the 'action' folder
# add_action_files(
# FILES
# Action1.action
# Action2.action
# )## Generate added messages and services with any dependencies listed heregenerate_messages(DEPENDENCIESstd_msgs)################################################
## Declare ROS dynamic reconfigure parameters ##
################################################## To declare and build dynamic reconfigure parameters within this
## package, follow these steps:
## * In the file package.xml:
## * add a build_depend and a exec_depend tag for "dynamic_reconfigure"
## * In this file (CMakeLists.txt):
## * add "dynamic_reconfigure" to
## find_package(catkin REQUIRED COMPONENTS ...)
## * uncomment the "generate_dynamic_reconfigure_options" section below
## and list every .cfg file to be processed## Generate dynamic reconfigure parameters in the 'cfg' folder
# generate_dynamic_reconfigure_options(
# cfg/DynReconf1.cfg
# cfg/DynReconf2.cfg
# )###################################
## catkin specific configuration ##
###################################
## The catkin_package macro generates cmake config files for your package
## Declare things to be passed to dependent projects
## INCLUDE_DIRS: uncomment this if your package contains header files
## LIBRARIES: libraries you create in this project that dependent projects also need
## CATKIN_DEPENDS: catkin_packages dependent projects also need
## DEPENDS: system dependencies of this project that dependent projects also need
catkin_package(
# INCLUDE_DIRS include
# LIBRARIES custom_msgsCATKIN_DEPENDS message_generation message_runtime std_msgs
# DEPENDS system_lib
)###########
## Build ##
############# Specify additional locations of header files
## Your package locations should be listed before other locations
include_directories(
# include${catkin_INCLUDE_DIRS}
)custom_msgs/package.xml
<?xml version="1.0"?>
<package format="2"><name>custom_msgs</name><version>0.0.0</version><description>The custom_msgs package</description><!-- One maintainer tag required, multiple allowed, one person per tag --><!-- Example: --><!-- <maintainer email="jane.doe@example.com">Jane Doe</maintainer> --><maintainer email="root@todo.todo">root</maintainer><!-- One license tag required, multiple allowed, one license per tag --><!-- Commonly used license strings: --><!-- BSD, MIT, Boost Software License, GPLv2, GPLv3, LGPLv2.1, LGPLv3 --><license>TODO</license><!-- Url tags are optional, but multiple are allowed, one per tag --><!-- Optional attribute type can be: website, bugtracker, or repository --><!-- Example: --><!-- <url type="website">http://wiki.ros.org/custom_msgs</url> --><!-- Author tags are optional, multiple are allowed, one per tag --><!-- Authors do not have to be maintainers, but could be --><!-- Example: --><!-- <author email="jane.doe@example.com">Jane Doe</author> --><!-- The *depend tags are used to specify dependencies --><!-- Dependencies can be catkin packages or system dependencies --><!-- Examples: --><!-- Use depend as a shortcut for packages that are both build and exec dependencies --><!-- <depend>roscpp</depend> --><!-- Note that this is equivalent to the following: --><!-- <build_depend>roscpp</build_depend> --><!-- <exec_depend>roscpp</exec_depend> --><!-- Use build_depend for packages you need at compile time: --><!-- <build_depend>message_generation</build_depend> --><!-- Use build_export_depend for packages you need in order to build against this package: --><!-- <build_export_depend>message_generation</build_export_depend> --><!-- Use buildtool_depend for build tool packages: --><!-- <buildtool_depend>catkin</buildtool_depend> --><!-- Use exec_depend for packages you need at runtime: --><!-- <exec_depend>message_runtime</exec_depend> --><!-- Use test_depend for packages you need only for testing: --><!-- <test_depend>gtest</test_depend> --><!-- Use doc_depend for packages you need only for building documentation: --><!-- <doc_depend>doxygen</doc_depend> --><buildtool_depend>catkin</buildtool_depend><build_depend>message_generation</build_depend><build_depend>std_msgs</build_depend><build_export_depend>std_msgs</build_export_depend><exec_depend>std_msgs</exec_depend><exec_depend>message_generation</exec_depend><exec_depend>message_runtime</exec_depend><!-- The export tag contains other, unspecified, tags --><export><!-- Other tools can request additional information be placed here --></export>
</package>编译自定义消息
catkin_make
编译成功即可
编译ros2自定义消息
ros2编译操作在bridge根目录执行
创建ROS2工作区
# 需要新开一个终端,避免ROS1和ROS2环境混杂
source /opt/ros/foxy/setup.bash
mkdir colcon_ws
cd colcon_ws
ros2 pkg create --build-type ament_cmake custom_msgs创建自定义消息
这里我的自定义消息内容如下:
custom_msgs/msg/MotCmd.msg
# type: 1 on MoveL, 2 on MoveR, 3 on MoveCint64 type
Pose[] pose_arr
float64 velocity
float64 accelerationcustom_msgs/msg/Pose.msg
float64 x
float64 y
float64 z
float64 qw
float64 qx
float64 qy
float64 qz
custom_msgs/msg/ShapeBox.msg
Pose center
float64 l
float64 w
float64 hcustom_msgs/srv/PlannerPlanPath.srv
Pose start_pose
Pose target_pose
ShapeBox robot
ShapeBox[] env
---
int64 error_code
MotCmd[] cmd_arr
修改CMakeLists.txt和package.xm进行编译适配
custom_msgs/CMakeLists.txt
cmake_minimum_required(VERSION 3.5)
project(custom_msgs)# Default to C99
if(NOT CMAKE_C_STANDARD)set(CMAKE_C_STANDARD 99)
endif()# Default to C++14
if(NOT CMAKE_CXX_STANDARD)set(CMAKE_CXX_STANDARD 14)
endif()if(CMAKE_COMPILER_IS_GNUCXX OR CMAKE_CXX_COMPILER_ID MATCHES "Clang")add_compile_options(-Wall -Wextra -Wpedantic)
endif()# find dependencies
find_package(ament_cmake REQUIRED)
find_package(builtin_interfaces REQUIRED)
find_package(rosidl_default_generators REQUIRED)rosidl_generate_interfaces(custom_msgssrv/PlannerPlanPath.srvmsg/Pose.msgmsg/ShapeBox.msgmsg/MotCmd.msgDEPENDENCIESbuiltin_interfaces
)install(TARGETSDESTINATION share/${PROJECT_NAME}
)
ament_export_dependencies(rosidl_default_runtime)
# uncomment the following section in order to fill in
# further dependencies manually.
# find_package(<dependency> REQUIRED)if(BUILD_TESTING)find_package(ament_lint_auto REQUIRED)# the following line skips the linter which checks for copyrights# uncomment the line when a copyright and license is not present in all source files#set(ament_cmake_copyright_FOUND TRUE)# the following line skips cpplint (only works in a git repo)# uncomment the line when this package is not in a git repo#set(ament_cmake_cpplint_FOUND TRUE)ament_lint_auto_find_test_dependencies()
endif()ament_package()custom_msgs/package.xml
<?xml version="1.0"?>
<?xml-model href="http://download.ros.org/schema/package_format3.xsd" schematypens="http://www.w3.org/2001/XMLSchema"?>
<package format="3"><name>custom_msgs</name><version>0.0.0</version><description>TODO: Package description</description><maintainer email="root@todo.todo">root</maintainer><license>TODO: License declaration</license><buildtool_depend>ament_cmake</buildtool_depend><member_of_group>rosidl_interface_packages</member_of_group><test_depend>ament_lint_auto</test_depend><test_depend>ament_lint_common</test_depend><depend>builtin_interfaces</depend><depend>rosidl_default_generators</depend><depend>rclpy</depend><export><build_type>ament_cmake</build_type></export>
</package>编译自定义消息
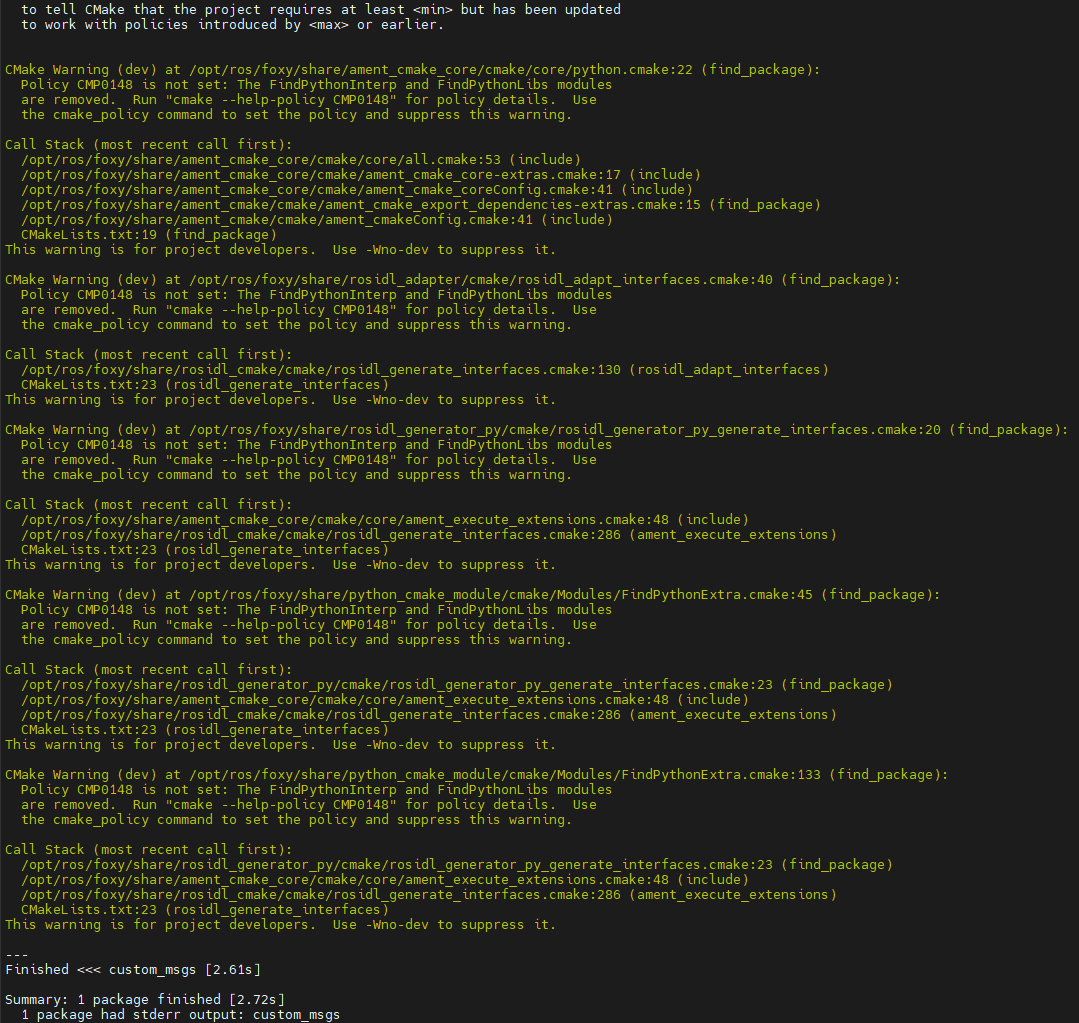
colcon build --packages-select custom_msgs –symlink-install
编译成功后能看到提示
编译ros bridge
source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
source catkin_ws/devel/setup.bash
source colcon_ws/install/setup.bash
colcon build --packages-select ros1_bridge --cmake-force-configure

source /opt/ros/noetic/setup.bash
source /opt/ros/foxy/setup.bash
source catkin_ws/devel/setup.bash
source colcon_ws/install/setup.bash
source install/setup.bash
ros2 run ros1_bridge dynamic_bridge --print-pairs | grep custom_msgs

ros2 run ros1_bridge dynamic_bridge

可以成功看到bridge被运行,并且能桥接我们想要的数据类型!
编译问题汇总
cmake版本不匹配
这里我使用的是3.12版本cmake
wget https://cmake.org/files/v3.12/cmake-3.12.0.tar.gz --no-check-certificate
./configure --prefix=/usr/local/cmake
make && make install
rm -rf /usr/bin/cmake
ln -s /usr/local/cmake/bin/cmake /usr/bin/cmake
cmake --version
能看到版本号显示3.12版本
ros2编译,colon环境缺失
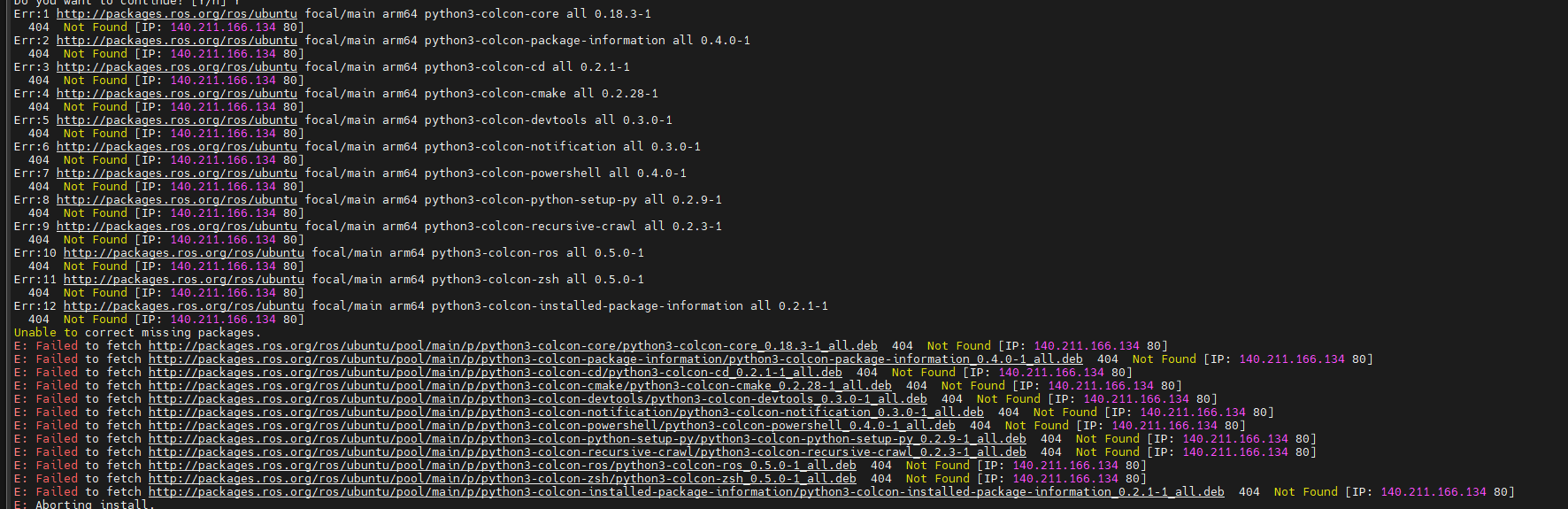
colon build时提示colon not found 需要安装colon环境
执行sudo apt install python3-colcon-common-extensions安装,如果遇到以下报错则可以这样解决:
sudo sh -c ‘. /etc/lsb-release && echo “deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ lsb_release -cs main” > /etc/apt/sources.list.d/ros-latest.list’
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654
sudo apt update
随后执行sudo apt install python3-colcon-common-extensions
重新安装colcon
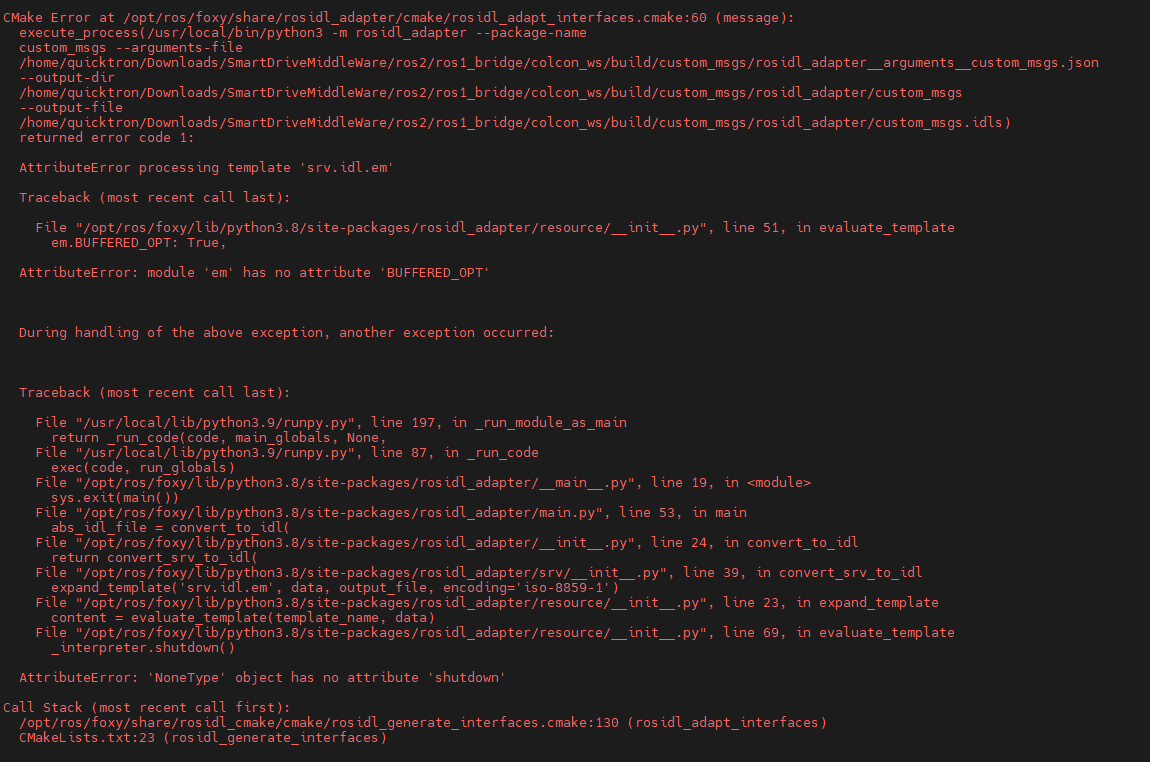
em和empy环境冲突
错误提示如下,原因是empy和em都是使用import em引入,而我们真正要使用的是empy
执行以下命令解决:
pip uninstall em
pip3 install empy==3.3.4
pip3 install lark
rospkg安装
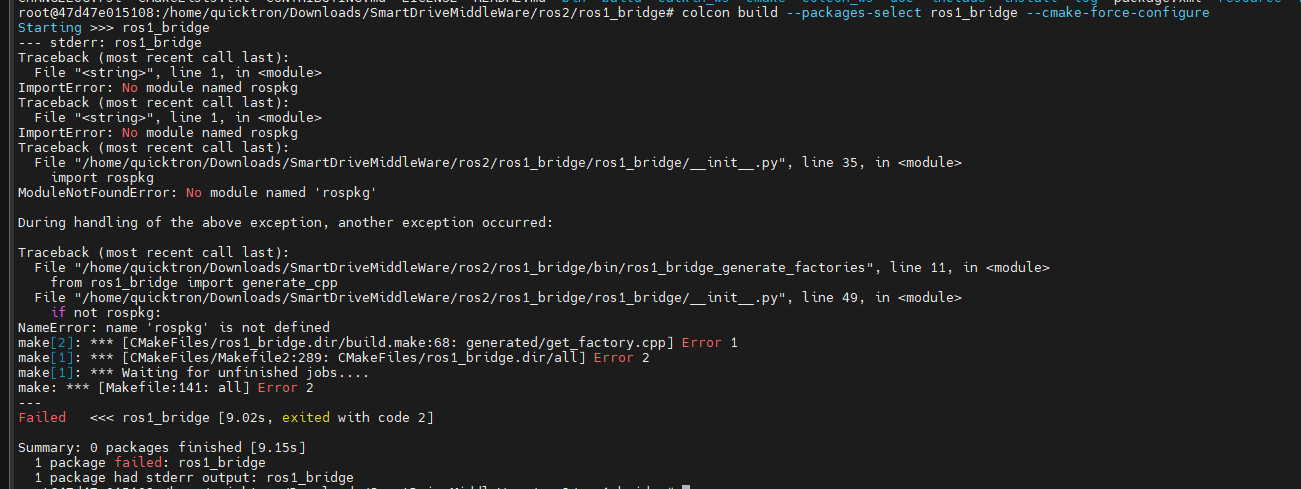
pip3 install rospkg