MetaShape(PhotoScan)——Camera calibration相机标定详解
一句话概括:
Metashape 的相机标定是在 Calibration Group 层级上,借助 对齐/优化阶段的捆绑平差,把 EXIF/手工初值转化为整组照片的 联合最优内参;提供固定参数、按影像变体参数、快门补偿、像片基准点(航片)等专业选项,并用残差/相关性等工具评估结果质量。
1) 标定对象:按“Calibration Group(标定组)”而不是单张影像
-
导入照片后,Metashape会依据 图像分辨率与/或EXIF(相机型号、焦距等)把照片自动分到若干 Calibration Groups。
-
每个组共享同一套内参(f、cx、cy、k1–k4、p1–p2等)
-
也可以在 Tools → Camera Calibration 里手动:
-
Create Group / Move photos between groups / Split Groups(把每张照片放入各自独立的组也可以)。
-
-
多机位、不同分辨率、不同镜头/焦段,就应分别成组,各组独立求内参。
2) 相机类型与初值来源
支持 Frame camera(常规针孔)、Fisheye、Spherical(等距矩形)、Cylindrical,以及 RPC(卫星影像)。
-
Rolling shutter compensation 可选(Preferences 或 Camera Calibration 对话框里启用)。
-
初值通常来自 EXIF(焦距mm、像元尺寸/传感器尺寸、分辨率)。若 EXIF 不足,软件会假定一个等效焦距(photoscan的说明文件里写明了:缺失时默认 50 mm、35mm等效),或在 Calibration 对话框 Initial 页签手动录入。
-
对于底片扫描类航摄像片,可走 Fiducial marks(像片像主点及边缘基准点)的专用流程(Detect/Calibrate Fiducials),在 相机坐标系(原点在传感器中心,X向右、Y向下,单位 mm)录入像控点坐标。
3) 可估计/录入的参数(Initial 页签)
-
f:焦距(单位是像素)。
-
cx, cy:主点(像素坐标)。
-
b1, b2:Affinity 与 Skew(非正交/非等尺性)。
-
k1–k4:径向畸变。
-
p1, p2:切向畸变。
也可 Load 外部标定文件(Agisoft 自家格式或 Australis / PhotoModeler / CalCam / OpenCV 等格式)。
若你已有非常可靠的先验,可把部分参数设为 Fixed(固定不估)以稳定求解。
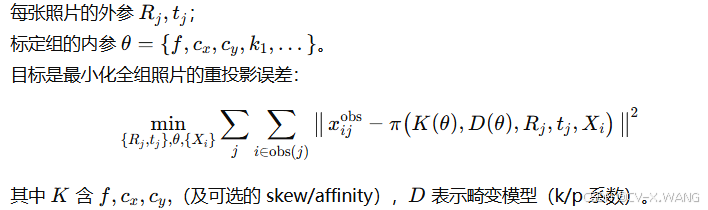
4) 标定什么时候“被求出来”?——在对齐与优化步骤中
求解并不在你点开对话框时发生,而是发生在:
-
Align Photos(匹配/重建稀疏点)阶段,捆绑平差会 联合估计:
- Optimize Cameras(在稀疏点云上进一步优化)阶段,你可以勾选希望参与优化的参数子集,再跑一次 BA 细化。
-
优化完成后,Adjusted 页签显示“估计后的内参”。你可以 Save 导出这套结果。
5) “Image-variant parameters”(可选,按相机而非整组共享)
-
有时需要在同一组里 对每台物理相机或每张影像分别估计某些内参子集(例如滚快门强、主点轻微漂移等),可在 Image-variant parameters 区域勾选对应项,让这些参数在组内“按影像/相机实例解耦”估。
-
否则默认是整组共享一套参数。
6) 结果评估与诊断(Analyzing calibration results)
在 Camera Calibration 对话框里,对每个组提供若干诊断页签:
-
Distortion:显示估计的总畸变/径向/偏心(decentering)等曲线与矢量图,含 Residuals(按网格/整组汇总的残差热力)。
-
Profile:径向与偏心畸变随半径的增长曲线,可导出图像。
-
Correlation:给出
-
已估计的内参及其 标准差/不确定度;
-
相关系数矩阵(判断参数耦合度,相关性过高说明可适当固定/减少自由度)。
-
-
Vignetting:辐射暗角模型(若元数据里有或通过 Calibrate Colors 另行估计)。
7) fx/fy/px/py
内部以 f(像素) + **cx,cy(像素)**为主;若你从 EXIF 启动了 焦距 f_mm 与 传感器尺寸 Sx,Sy(mm),初值会按

-
建立到像素坐标系;其后在 BA 中被统一优化为 Adjusted f,cx,cy(也就对应你导出时看到的 fx, fy, px, py)。
-
是否逐张?——默认 按组共享;只有启用 Image-variant 时才可能出现“每张/每机位单独估计某些参数”。