【完整源码+数据集+部署教程】可回收金属垃圾检测系统源码和数据集:改进yolo11-AggregatedAtt
背景意义
研究背景与意义
随着全球对可持续发展和资源循环利用的关注日益增强,废弃物管理与回收利用成为了现代社会面临的重要挑战之一。金属垃圾,作为一种常见的可回收物品,其有效检测与分类对于提升资源回收率、减少环境污染具有重要意义。传统的金属垃圾检测方法往往依赖人工分拣,不仅效率低下,而且容易受到人为因素的影响,导致分类不准确。因此,基于计算机视觉技术的自动化检测系统应运而生,成为提升金属垃圾回收效率的有效解决方案。
在众多计算机视觉算法中,YOLO(You Only Look Once)系列算法因其高效的实时目标检测能力而备受青睐。YOLOv11作为该系列的最新版本,进一步优化了检测精度和速度,适合于处理复杂的环境和多样化的物体。在本研究中,我们将基于改进的YOLOv11算法,构建一个专门针对可回收金属垃圾的检测系统。该系统旨在通过深度学习技术,实现对四类金属垃圾(瓶盖、硬币、可乐罐和回形针)的高效识别与分类。
为支持这一目标,我们使用了一个包含2217张图像的数据集,涵盖了上述四类物品。数据集经过精心标注,并进行了多种预处理和增强,以提高模型的泛化能力和鲁棒性。通过对这些数据的深入分析与训练,我们期望不仅能够提升金属垃圾的检测精度,还能为后续的智能垃圾分类系统提供坚实的基础。
综上所述,基于改进YOLOv11的可回收金属垃圾检测系统的研究,不仅有助于推动智能垃圾分类技术的发展,还将为实现资源的高效回收和环境保护贡献一份力量。这一研究的成功实施,将为可持续发展目标的实现提供重要的技术支持和实践经验。
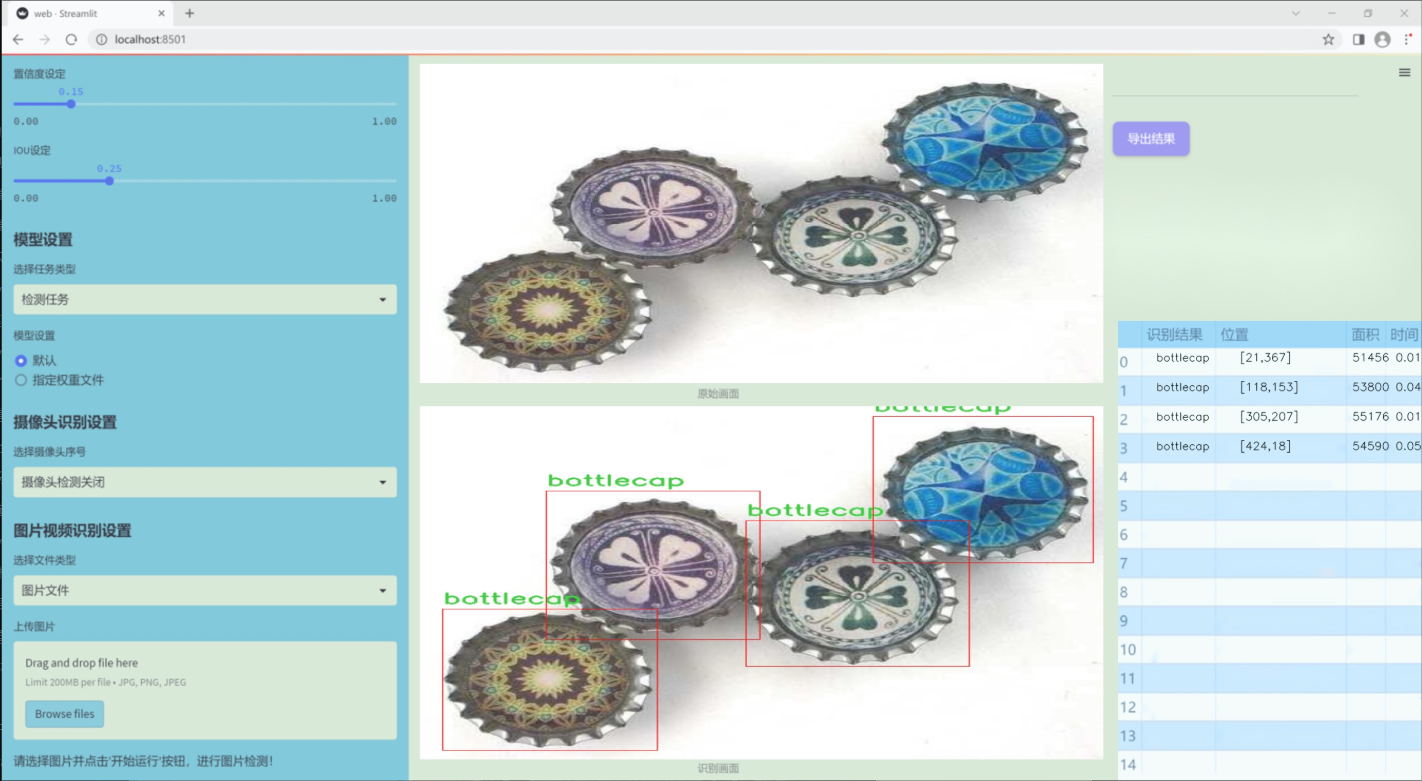
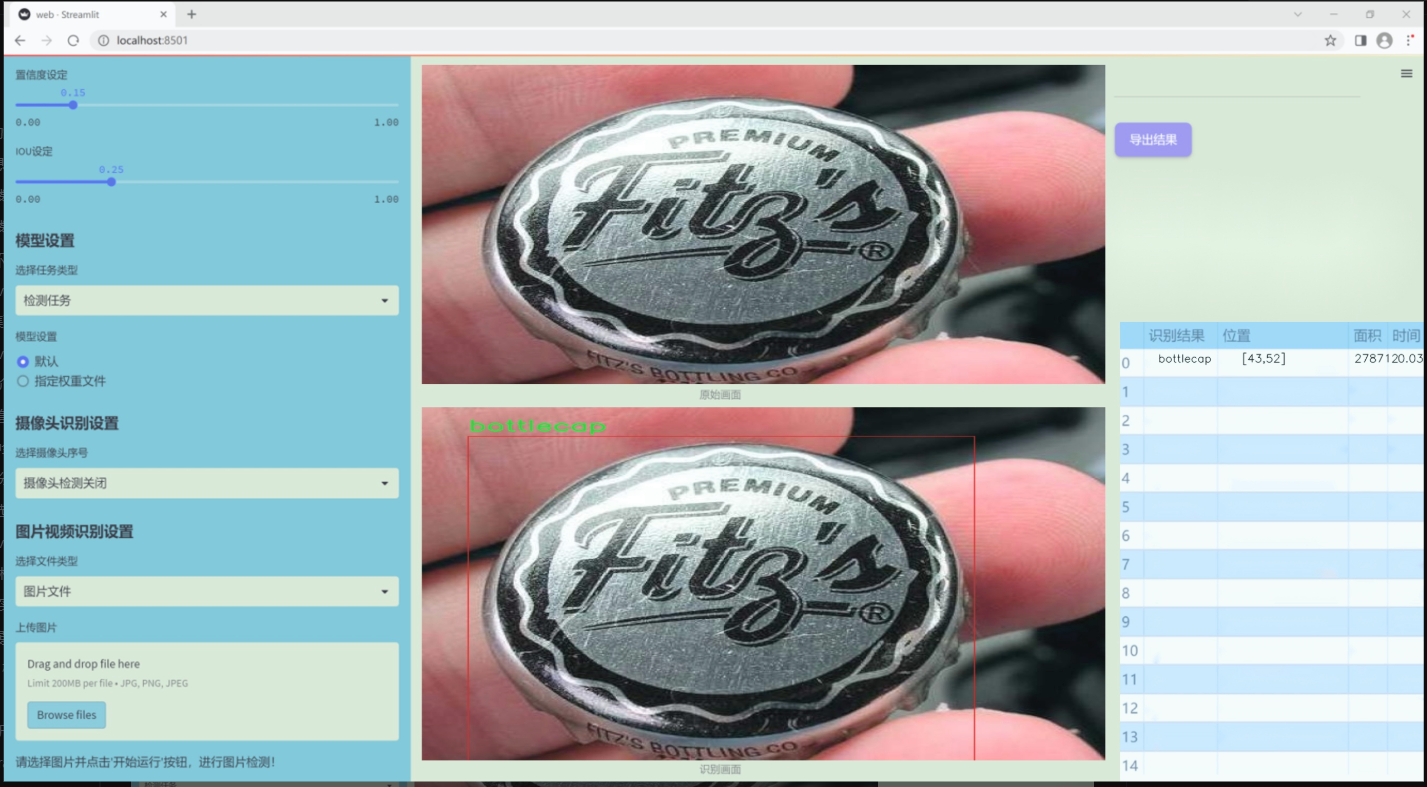
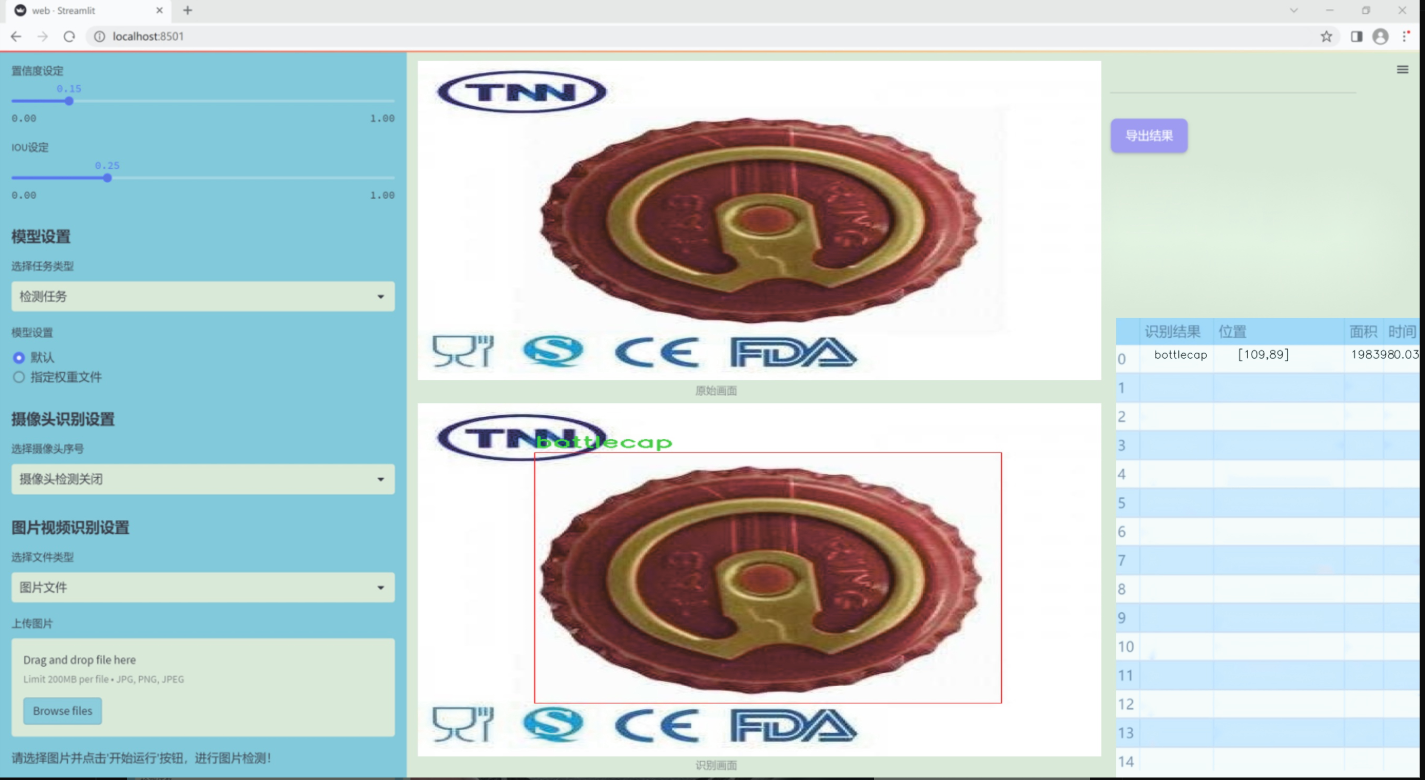
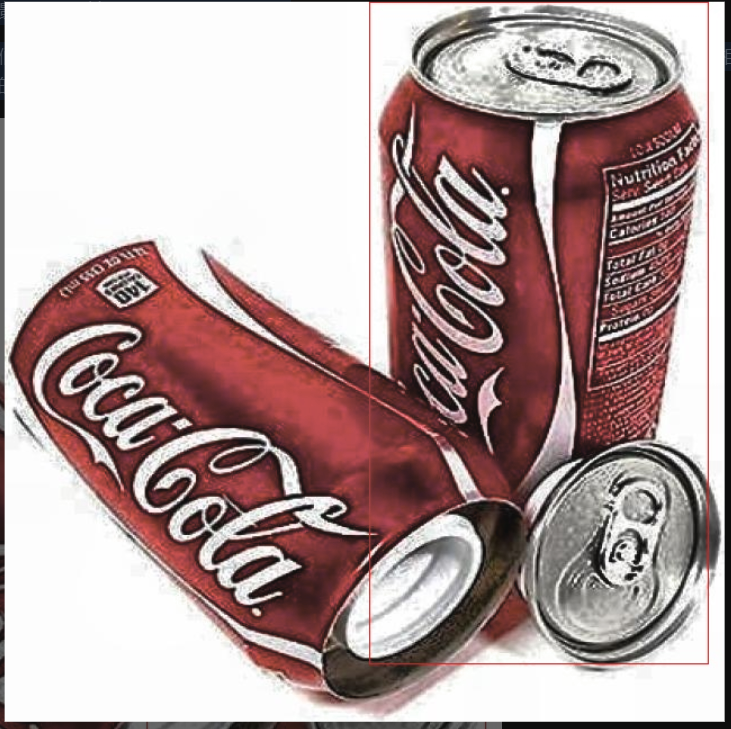
图片效果
数据集信息
本项目数据集信息介绍
本项目旨在开发一个改进版的YOLOv11模型,以实现高效的可回收金属垃圾检测系统。为此,我们构建了一个专门的数据集,专注于物体检测领域,涵盖了四种主要类别的可回收物品。这些类别包括瓶盖(bottlecap)、硬币(coin)、可乐罐(coke)和回形针(paperclips)。每个类别在数据集中都经过精心标注,以确保模型能够准确识别和分类这些物品。
数据集的构建过程涉及多种数据采集方法,包括实地拍摄和合成图像生成。我们从不同的环境和光照条件下收集了大量样本,以增强模型的鲁棒性和适应性。每个类别的样本数量均衡,确保模型在训练过程中不会偏向某一特定类别,从而提高整体检测性能。数据集中包含的图像经过预处理,确保了其质量和清晰度,以便于模型的学习和训练。
在数据标注方面,我们采用了高精度的标注工具,确保每个物体的边界框准确无误。这对于YOLOv11模型的训练至关重要,因为准确的标注能够直接影响模型的检测精度和召回率。此外,数据集还包括多种场景下的图像,以模拟实际应用中的复杂情况,例如不同的背景、物体的遮挡以及各种拍摄角度。
通过这一数据集的构建,我们希望为可回收金属垃圾的自动检测提供一个坚实的基础,从而推动环境保护和资源回收的相关研究。我们相信,改进后的YOLOv11模型将能够在实际应用中展现出卓越的性能,为可持续发展贡献一份力量。
核心代码
以下是经过简化并添加详细中文注释的核心代码部分:
import torch
import torch.nn as nn
import torch.nn.functional as F
import numpy as np
class Mlp(nn.Module):
“”" 多层感知机(MLP)模块 “”"
def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.GELU, drop=0.):super().__init__()out_features = out_features or in_features # 输出特征数hidden_features = hidden_features or in_features # 隐藏层特征数self.fc1 = nn.Linear(in_features, hidden_features) # 第一层线性变换self.act = act_layer() # 激活函数self.fc2 = nn.Linear(hidden_features, out_features) # 第二层线性变换self.drop = nn.Dropout(drop) # Dropout层def forward(self, x):""" 前向传播 """x = self.fc1(x) # 线性变换x = self.act(x) # 激活x = self.drop(x) # Dropoutx = self.fc2(x) # 线性变换x = self.drop(x) # Dropoutreturn x
class WindowAttention(nn.Module):
“”" 窗口注意力机制模块 “”"
def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0.):super().__init__()self.dim = dim # 输入通道数self.window_size = window_size # 窗口大小self.num_heads = num_heads # 注意力头数head_dim = dim // num_heads # 每个头的维度self.scale = head_dim ** -0.5 # 缩放因子# 定义相对位置偏置参数self.relative_position_bias_table = nn.Parameter(torch.zeros((2 * window_size[0] - 1) * (2 * window_size[1] - 1), num_heads))# 计算相对位置索引coords_h = torch.arange(self.window_size[0])coords_w = torch.arange(self.window_size[1])coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 生成坐标网格coords_flatten = torch.flatten(coords, 1) # 展平坐标relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 计算相对坐标relative_coords = relative_coords.permute(1, 2, 0).contiguous() # 调整维度relative_coords[:, :, 0] += self.window_size[0] - 1 # 调整坐标范围relative_coords[:, :, 1] += self.window_size[1] - 1relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1relative_position_index = relative_coords.sum(-1) # 计算相对位置索引self.register_buffer("relative_position_index", relative_position_index) # 注册为缓冲区self.qkv = nn.Linear(dim, dim * 3, bias=qkv_bias) # 线性变换用于生成Q、K、Vself.attn_drop = nn.Dropout(attn_drop) # 注意力的Dropoutself.proj = nn.Linear(dim, dim) # 输出线性变换self.proj_drop = nn.Dropout(proj_drop) # 输出的Dropoutself.softmax = nn.Softmax(dim=-1) # Softmax层def forward(self, x, mask=None):""" 前向传播 """B_, N, C = x.shape # 获取输入的形状qkv = self.qkv(x).reshape(B_, N, 3, self.num_heads, C // self.num_heads).permute(2, 0, 3, 1, 4) # 计算Q、K、Vq, k, v = qkv[0], qkv[1], qkv[2] # 分离Q、K、Vq = q * self.scale # 缩放Qattn = (q @ k.transpose(-2, -1)) # 计算注意力得分# 添加相对位置偏置relative_position_bias = self.relative_position_bias_table[self.relative_position_index.view(-1)].view(self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1)relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # 调整维度attn = attn + relative_position_bias.unsqueeze(0) # 加入相对位置偏置if mask is not None:attn = attn + mask.unsqueeze(1).unsqueeze(0) # 加入maskattn = self.softmax(attn) # Softmax归一化attn = self.attn_drop(attn) # Dropoutx = (attn @ v).transpose(1, 2).reshape(B_, N, C) # 计算输出x = self.proj(x) # 输出线性变换x = self.proj_drop(x) # Dropoutreturn x
class SwinTransformer(nn.Module):
“”" Swin Transformer 主体 “”"
def __init__(self, embed_dim=96, depths=[2, 2, 6, 2], num_heads=[3, 6, 12, 24], window_size=7):super().__init__()self.embed_dim = embed_dim # 嵌入维度self.layers = nn.ModuleList() # 存储各层# 构建每一层for i_layer in range(len(depths)):layer = BasicLayer(dim=int(embed_dim * 2 ** i_layer),depth=depths[i_layer],num_heads=num_heads[i_layer],window_size=window_size)self.layers.append(layer)def forward(self, x):""" 前向传播 """for layer in self.layers:x = layer(x) # 逐层传递return x # 返回最终输出
代码说明:
Mlp类:实现了一个多层感知机,包含两层线性变换和激活函数。
WindowAttention类:实现了窗口注意力机制,支持相对位置偏置。
SwinTransformer类:实现了Swin Transformer的主体结构,包含多个基本层(BasicLayer),每层使用窗口注意力机制进行特征提取。
该代码片段是Swin Transformer模型的核心部分,负责实现特征提取和注意力机制。
这个程序文件实现了Swin Transformer模型的结构,Swin Transformer是一种基于视觉的Transformer架构,具有分层和移动窗口的特性。代码中定义了多个类和函数,以实现模型的各个组成部分。
首先,程序导入了必要的库,包括PyTorch的核心模块和一些用于构建模型的辅助函数。接着,定义了一个名为Mlp的类,这是一个多层感知机(MLP),用于在Transformer的每个块中进行前馈神经网络的计算。Mlp类的构造函数接受输入特征、隐藏特征和输出特征的维度,以及激活函数和丢弃率。其forward方法实现了前向传播。
接下来,定义了window_partition和window_reverse函数,这两个函数用于将输入特征分割成窗口以及将窗口合并回原始特征。窗口的概念是Swin Transformer的核心之一,它允许模型在局部区域内进行自注意力计算。
WindowAttention类实现了基于窗口的多头自注意力机制,支持相对位置偏置。它的构造函数定义了输入通道数、窗口大小、注意力头数等参数,并初始化了一些必要的权重。forward方法实现了自注意力的计算过程,包括查询、键、值的计算,以及相对位置偏置的应用。
SwinTransformerBlock类则是Swin Transformer的基本构建块,包含了归一化层、窗口注意力层和前馈网络。它的forward方法实现了输入特征的处理,包括规范化、窗口划分、注意力计算和前馈网络的应用。
PatchMerging类用于将特征图的补丁合并,以减少特征图的分辨率。它的forward方法实现了特征的重组和归一化。
BasicLayer类表示Swin Transformer中的一个基本层,包含多个SwinTransformerBlock。它的构造函数接受层的深度、头数、窗口大小等参数,并构建出多个块。forward方法计算输入特征的处理,并在必要时进行下采样。
PatchEmbed类用于将输入图像分割成补丁并进行嵌入。它的forward方法实现了图像的填充、卷积操作和归一化。
SwinTransformer类是整个模型的主类,负责将所有的组件组合在一起。它的构造函数定义了输入图像的大小、补丁大小、嵌入维度、每个阶段的深度和头数等参数,并构建出各个层。forward方法实现了模型的前向传播过程,包括补丁嵌入、位置编码的添加、各层的处理以及输出的归一化。
最后,update_weight函数用于更新模型的权重,确保加载的权重与模型的结构匹配。SwinTransformer_Tiny函数则是一个工厂函数,用于创建一个小型的Swin Transformer模型,并在提供权重文件时加载相应的权重。
总体而言,这个程序文件实现了Swin Transformer的完整结构,涵盖了模型的各个部分,包括嵌入、注意力机制、前馈网络和层的组合,适用于图像处理任务。
10.3 RFAConv.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn as nn
from einops import rearrange
class RFAConv(nn.Module):
def init(self, in_channel, out_channel, kernel_size, stride=1):
super().init()
self.kernel_size = kernel_size
# 用于获取权重的卷积模块self.get_weight = nn.Sequential(nn.AvgPool2d(kernel_size=kernel_size, padding=kernel_size // 2, stride=stride),nn.Conv2d(in_channel, in_channel * (kernel_size ** 2), kernel_size=1, groups=in_channel, bias=False))# 用于生成特征的卷积模块self.generate_feature = nn.Sequential(nn.Conv2d(in_channel, in_channel * (kernel_size ** 2), kernel_size=kernel_size, padding=kernel_size // 2, stride=stride, groups=in_channel, bias=False),nn.BatchNorm2d(in_channel * (kernel_size ** 2)),nn.ReLU())# 最终的卷积层self.conv = nn.Conv2d(in_channel, out_channel, kernel_size=kernel_size, stride=kernel_size)def forward(self, x):b, c = x.shape[0:2] # 获取输入的批量大小和通道数weight = self.get_weight(x) # 获取权重h, w = weight.shape[2:] # 获取特征图的高和宽# 对权重进行softmax归一化weighted = weight.view(b, c, self.kernel_size ** 2, h, w).softmax(2) # b c*kernel**2, h, w# 生成特征并调整形状feature = self.generate_feature(x).view(b, c, self.kernel_size ** 2, h, w) # b c*kernel**2, h, w# 加权特征weighted_data = feature * weighted# 调整形状以进行卷积conv_data = rearrange(weighted_data, 'b c (n1 n2) h w -> b c (h n1) (w n2)', n1=self.kernel_size, n2=self.kernel_size)return self.conv(conv_data) # 返回卷积结果
class SE(nn.Module):
def init(self, in_channel, ratio=16):
super(SE, self).init()
self.gap = nn.AdaptiveAvgPool2d((1, 1)) # 全局平均池化
self.fc = nn.Sequential(
nn.Linear(in_channel, ratio, bias=False), # 从 c -> c/r
nn.ReLU(),
nn.Linear(ratio, in_channel, bias=False), # 从 c/r -> c
nn.Sigmoid()
)
def forward(self, x):b, c = x.shape[0:2] # 获取输入的批量大小和通道数y = self.gap(x).view(b, c) # 进行全局平均池化并调整形状y = self.fc(y).view(b, c, 1, 1) # 通过全连接层并调整形状return y # 返回通道注意力权重
class RFCBAMConv(nn.Module):
def init(self, in_channel, out_channel, kernel_size=3, stride=1):
super().init()
self.kernel_size = kernel_size
# 特征生成模块self.generate = nn.Sequential(nn.Conv2d(in_channel, in_channel * (kernel_size ** 2), kernel_size, padding=kernel_size // 2, stride=stride, groups=in_channel, bias=False),nn.BatchNorm2d(in_channel * (kernel_size ** 2)),nn.ReLU())# 权重获取模块self.get_weight = nn.Sequential(nn.Conv2d(2, 1, kernel_size=3, padding=1, bias=False), nn.Sigmoid())self.se = SE(in_channel) # 通道注意力模块# 最终的卷积层self.conv = nn.Conv2d(in_channel, out_channel, kernel_size=kernel_size, stride=kernel_size)def forward(self, x):b, c = x.shape[0:2] # 获取输入的批量大小和通道数channel_attention = self.se(x) # 获取通道注意力generate_feature = self.generate(x) # 生成特征h, w = generate_feature.shape[2:] # 获取特征图的高和宽generate_feature = generate_feature.view(b, c, self.kernel_size ** 2, h, w) # 调整形状# 调整形状以进行卷积generate_feature = rearrange(generate_feature, 'b c (n1 n2) h w -> b c (h n1) (w n2)', n1=self.kernel_size, n2=self.kernel_size)# 加权特征unfold_feature = generate_feature * channel_attention# 计算最大值和均值特征max_feature, _ = torch.max(generate_feature, dim=1, keepdim=True)mean_feature = torch.mean(generate_feature, dim=1, keepdim=True)# 获取感受野注意力receptive_field_attention = self.get_weight(torch.cat((max_feature, mean_feature), dim=1))# 返回卷积结果conv_data = unfold_feature * receptive_field_attentionreturn self.conv(conv_data)
代码说明:
RFAConv: 该类实现了一种卷积层,结合了特征生成和权重计算,通过自适应的方式来增强特征表示。
SE: 该类实现了Squeeze-and-Excitation模块,用于生成通道注意力权重,增强网络对重要特征的关注。
RFCBAMConv: 该类结合了RFAConv和SE模块,进一步增强了特征提取能力,并引入了感受野注意力机制。
这些模块可以用于构建更复杂的神经网络架构,提升图像处理任务的性能。
这个程序文件 RFAConv.py 定义了一些用于卷积神经网络的模块,主要包括 RFAConv、RFCBAMConv 和 RFCAConv 三个类,以及一些辅助的激活函数和注意力机制。下面是对代码的详细说明。
首先,文件导入了必要的库,包括 PyTorch 的核心模块和一些自定义的卷积模块。接着,定义了两个激活函数类 h_sigmoid 和 h_swish,这两个类分别实现了 h-sigmoid 和 h-swish 激活函数,通常用于提高网络的非线性表达能力。
RFAConv 类是一个自定义的卷积层,它通过加权的方式生成特征图。初始化时,它接受输入通道数、输出通道数、卷积核大小和步幅作为参数。该类内部定义了两个主要的子模块:get_weight 和 generate_feature。get_weight 通过平均池化和卷积操作生成权重,而 generate_feature 则通过卷积、批归一化和 ReLU 激活生成特征。前向传播中,首先计算权重,然后生成特征,接着将特征与权重相乘,最后通过重排和卷积得到输出。
SE 类实现了 Squeeze-and-Excitation (SE) 模块,用于增强特征的表达能力。它通过全局平均池化和全连接层来生成通道注意力权重,进而调整输入特征的通道信息。
RFCBAMConv 类是一个结合了通道注意力和空间注意力的卷积模块。它在初始化时定义了生成特征的卷积层、获取权重的卷积层以及 SE 模块。在前向传播中,首先计算通道注意力,然后生成特征并重排,接着计算最大值和均值特征以生成空间注意力权重,最后将特征与注意力权重相乘并通过卷积得到输出。
RFCAConv 类则实现了一种更复杂的卷积模块,结合了空间和通道注意力机制。它在初始化时定义了生成特征的卷积层、用于计算通道注意力的卷积层以及最终的卷积层。在前向传播中,生成特征后,通过自适应平均池化计算水平和垂直方向的特征,然后将它们拼接并通过一系列卷积和激活操作生成通道注意力,最后将特征与注意力权重相乘并通过卷积得到最终输出。
总体而言,这个文件实现了一些先进的卷积操作和注意力机制,旨在提高卷积神经网络的性能,尤其是在处理图像等高维数据时。
10.4 utils.py
以下是代码中最核心的部分,并附上详细的中文注释:
import torch
import torch.nn.functional as F
def multi_scale_deformable_attn_pytorch(
value: torch.Tensor,
value_spatial_shapes: torch.Tensor,
sampling_locations: torch.Tensor,
attention_weights: torch.Tensor,
) -> torch.Tensor:
“”"
多尺度可变形注意力机制。
参数:value: 输入特征图,形状为 (bs, C, num_heads, embed_dims)value_spatial_shapes: 特征图的空间形状,形状为 (num_levels, 2)sampling_locations: 采样位置,形状为 (bs, num_queries, num_heads, num_levels, num_points, 2)attention_weights: 注意力权重,形状为 (bs, num_heads, num_queries, num_levels, num_points)返回:output: 经过多尺度可变形注意力机制处理后的输出,形状为 (bs, num_queries, num_heads * embed_dims)
"""
bs, _, num_heads, embed_dims = value.shape # 获取输入特征图的批次大小、通道数、头数和嵌入维度
_, num_queries, _, num_levels, num_points, _ = sampling_locations.shape # 获取采样位置的相关维度# 将输入特征图按照空间形状拆分成多个特征图
value_list = value.split([H_ * W_ for H_, W_ in value_spatial_shapes], dim=1)# 将采样位置转换到[-1, 1]范围
sampling_grids = 2 * sampling_locations - 1
sampling_value_list = [] # 用于存储每个尺度的采样值for level, (H_, W_) in enumerate(value_spatial_shapes):# 对于每个尺度,调整特征图的形状以便进行采样value_l_ = value_list[level].flatten(2).transpose(1, 2).reshape(bs * num_heads, embed_dims, H_, W_)# 调整采样网格的形状sampling_grid_l_ = sampling_grids[:, :, :, level].transpose(1, 2).flatten(0, 1)# 使用grid_sample进行双线性插值采样sampling_value_l_ = F.grid_sample(value_l_, sampling_grid_l_, mode="bilinear", padding_mode="zeros", align_corners=False)sampling_value_list.append(sampling_value_l_) # 将采样结果添加到列表中# 调整注意力权重的形状以便进行加权求和
attention_weights = attention_weights.transpose(1, 2).reshape(bs * num_heads, 1, num_queries, num_levels * num_points
)# 计算最终输出,进行加权求和
output = ((torch.stack(sampling_value_list, dim=-2).flatten(-2) * attention_weights).sum(-1).view(bs, num_heads * embed_dims, num_queries)
)return output.transpose(1, 2).contiguous() # 返回输出,调整形状以符合预期
代码说明:
函数定义:multi_scale_deformable_attn_pytorch函数实现了多尺度可变形注意力机制。
参数说明:
value:输入特征图,包含多个头的特征信息。
value_spatial_shapes:特征图的空间形状,用于确定每个尺度的高和宽。
sampling_locations:指定在特征图上进行采样的位置。
attention_weights:每个查询对应的注意力权重。
主要步骤:
拆分输入特征图为多个尺度。
将采样位置转换到[-1, 1]范围。
对每个尺度的特征图进行双线性插值采样。
调整注意力权重的形状并进行加权求和,最终得到输出。
这个程序文件 utils.py 是一个用于实现一些常用功能的模块,主要涉及深度学习中的模型初始化和多尺度可变形注意力机制。文件中使用了 PyTorch 库,包含了一些重要的函数和工具。
首先,文件引入了必要的库,包括 copy、math、numpy 和 torch 及其子模块。接着,定义了一个 all 列表,指定了该模块公开的接口,方便其他模块导入。
文件中定义了一个 _get_clones 函数,该函数用于克隆给定的模块 n 次,并返回一个 ModuleList,这在构建具有多个相同层的网络时非常有用。
接下来是 bias_init_with_prob 函数,它根据给定的先验概率初始化卷积或全连接层的偏置值。这个函数使用了对数几率的公式,将概率转换为偏置值,以便在训练过程中更好地控制模型的输出。
linear_init 函数用于初始化线性模块的权重和偏置。它根据权重的形状计算一个边界值,并使用均匀分布在该范围内初始化权重和偏置。
inverse_sigmoid 函数计算输入张量的反 sigmoid 函数。它首先将输入限制在 [0, 1] 范围内,然后计算反 sigmoid 值。这个函数在一些模型中用于处理概率值的转换。
最后,multi_scale_deformable_attn_pytorch 函数实现了多尺度可变形注意力机制。该函数接收多个输入,包括值张量、空间形状、采样位置和注意力权重。函数内部首先对输入的值进行分割,然后计算采样网格,并使用 F.grid_sample 函数进行双线性插值,得到采样值。最后,通过加权求和的方式将采样值与注意力权重结合,输出最终的结果。
整体来看,这个模块提供了一些基础的工具函数,特别是在构建和初始化深度学习模型时非常实用,同时实现了一个复杂的多尺度注意力机制,为后续的模型训练和推理提供了支持。
源码文件

源码获取
欢迎大家点赞、收藏、关注、评论啦 、查看👇🏻获取联系方式👇🏻