云南网官方网站博客园和wordpress
文章目录
- 一、实验目的
- 实验内容
- 设计思路
- 三、实验代码实现
- 四、总结
一、实验目的
加深对磁盘调度算法的理解,进一步掌握先来先服务算法、最短寻道时间优先算法、SCAN和循环SCAN算法的实现方法。
实验内容
1.设计程序模拟先来先服务算法、最短寻道时间优先算法、SCAN和循环SCAN算法的工作过程。
2.分别利用不同的磁盘调度算法访问磁道序列,给出每一次访问的磁头移动距离,计算每种算法的平均寻道长度。
设计思路
先来先服务(FCFS)算法
最短寻道时间优先(SSTF)算法
SCAN 算法
循环 SCAN(C-SCAN)算法
三、实验代码实现
- 先来先服务(FCFS)算法
FCFS 是最简单的磁盘调度算法,按照请求到达的先后顺序依次处理。实现代码如下:
// 先来先服务算法(FCFS)
void FCFS(int request[], int n, int head) {int total_distance = 0;printf("FCFS磁盘调度顺序:\n");printf("%d ", head);for (int i = 0; i < n; i++) {int distance = abs(request[i] - head);total_distance += distance;head = request[i];printf("%d ", head);}printf("\n平均寻道长度: %.2f\n", (float)total_distance / n);
}
- 最短寻道时间优先(SSTF)算法
SSTF 算法选择距离当前磁头位置最近的请求进行处理,能够有效减少总寻道时间。
// 最短寻道时间优先算法(SSTF)
void SSTF(int request[], int n, int head) {int total_distance = 0;int visited[n];for (int i = 0; i < n; i++)visited[i] = 0;printf("SSTF磁盘调度顺序:\n");printf("%d ", head);for (int count = 0; count < n; count++) {int min_distance = 1000000;int index = -1;for (int i = 0; i < n; i++) {if (!visited[i]) {int distance = abs(request[i] - head);if (distance < min_distance) {min_distance = distance;index = i;}}}visited[index] = 1;total_distance += min_distance;head = request[index];printf("%d ", head);}printf("\n平均寻道长度: %.2f\n", (float)total_distance / n);
}
- SCAN 算法
SCAN 算法也称为电梯算法,磁头向一个方向移动,处理途中的所有请求,直到到达磁盘边缘,然后改变方向继续处理。
// SCAN算法
void SCAN(int request[], int n, int head, int disk_size) {int total_distance = 0;int visited[n];for (int i = 0; i < n; i++)visited[i] = 0;// 对请求磁道号数组进行排序for (int i = 0; i < n - 1; i++) {for (int j = 0; j < n - i - 1; j++) {if (request[j] > request[j + 1]) {int temp = request[j];request[j] = request[j + 1];request[j + 1] = temp;}}}int index = 0;while (index < n && request[index] < head)index++;printf("SCAN磁盘调度顺序:\n");printf("%d ", head);// 向磁盘号增大的方向移动for (int i = index; i < n; i++) {total_distance += abs(request[i] - head);head = request[i];printf("%d ", head);}// 向磁盘号减小的方向移动(如果有需要)if (index > 0) {total_distance += abs(request[0] - head);head = request[0];printf("%d ", head);for (int i = 1; i < index; i++) {total_distance += abs(request[i] - head);head = request[i];printf("%d ", head);}}printf("\n平均寻道长度: %.2f\n", (float)total_distance / n);
}
- 循环 SCAN(C-SCAN)算法
C-SCAN 算法是 SCAN 算法的变种,磁头只向一个方向移动,到达边缘后立即返回到起始位置继续移动。
// 循环SCAN算法(C-SCAN)
void C_SCAN(int request[], int n, int head, int disk_size) {int total_distance = 0;int visited[n];for (int i = 0; i < n; i++)visited[i] = 0;// 对请求磁道号数组进行排序for (int i = 0; i < n - 1; i++) {for (int j = 0; j < n - i - 1; j++) {if (request[j] > request[j + 1]) {int temp = request[j];request[j] = request[j + 1];request[j + 1] = temp;}}}int index = 0;while (index < n && request[index] < head)index++;printf("C-SCAN磁盘调度顺序:\n");printf("%d ", head);// 向磁盘号增大的方向移动直到末尾for (int i = index; i < n; i++) {total_distance += abs(request[i] - head);head = request[i];printf("%d ", head);}// 直接跳到磁盘号最小的磁道,继续扫描total_distance += abs(request[0] - head);head = request[0];printf("%d ", head);for (int i = 1; i < index; i++) {total_distance += abs(request[i] - head);head = request[i];printf("%d ", head);}printf("\n平均寻道长度: %.2f\n", (float)total_distance / n);
}结果分析:
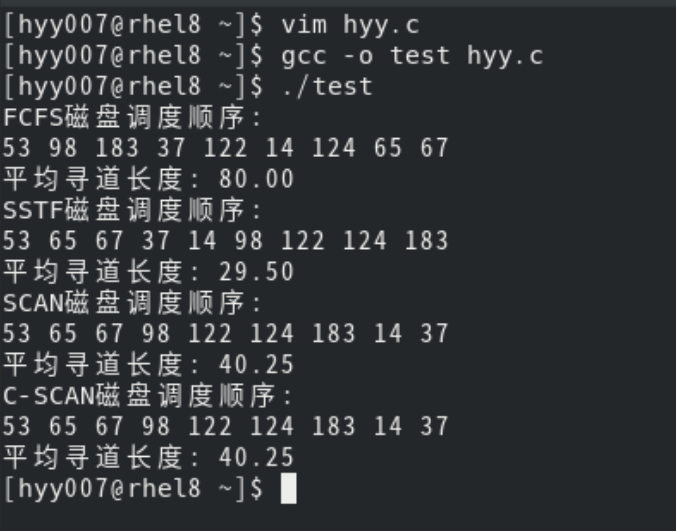
从实验结果可以看出:
FCFS 算法实现简单,但平均寻道长度最大,性能最差,因为它不考虑磁头的移动方向和距离。
SSTF 算法的平均寻道长度最小,性能最优,因为它总是选择最近的请求处理,但可能导致某些请求长期得不到服务(饥饿现象)。
SCAN 算法和 SSTF 性能接近,避免了饥饿现象,但由于需要改变方向,可能会增加一些额外的寻道时间。
C-SCAN 算法的平均寻道长度略高于 SCAN,因为它返回起点需要跨越整个磁盘,但它提供了更均匀的响应时间。
四、总结
- 遇到的问题
1致命语法错误:行头缺失
遇到的问题
函数命名冲突:malloc函数是标准库函数,在代码中重新定义会导致冲突。
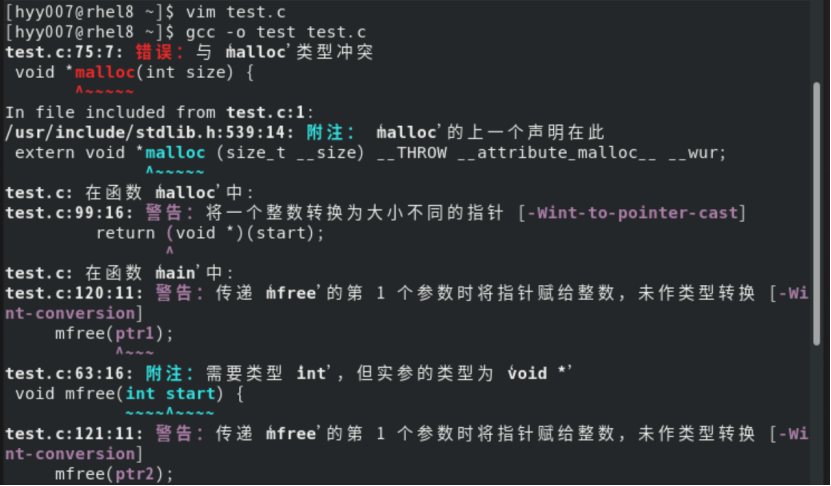
编译后提示错误,malloc 函数是标准库函数,重新定义会导致冲突。mfree 函数参数类型与标准库函数不匹配。指针转换为整数类型时需要进行类型转换。
参数类型不匹配:mfree函数参数类型与标准库函数不匹配。
类型转换问题:指针转换为整数类型时需要进行类型转换。
- 例如 SCAN 和 C-SCAN 算法需要对请求进行排序,这增加了算法的复杂度。此外,不同的初始磁头位置和请求序列会对算法性能产生显著影响。
通过本次实验,我深入理解了四种磁盘调度算法的工作原理和实现方法。不同的算法在不同的场景下有不同的优势:
FCFS 适用于请求较少或对公平性要求较高的场景。
SSTF 适用于大多数场景,能有效减少平均寻道时间。
SCAN 和 C-SCAN 适用于对响应时间分布要求较高的场景,如数据库系统。
通过比较各算法的性能,我认识到在实际操作系统中,需要根据系统的特点和应用需求选择合适的磁盘调度算法,以优化系统性能。