2025年ASOC SCI2区TOP,基于两种平衡机制的异构无人机群路径规划多目标进化算法,深度解析+性能实测,深度解析+性能实测
目录
- 1.摘要
- 2.问题描述
- 3.两种平衡机制多目标进化算法
- 4.结果展示
- 5.参考文献
- 6.代码获取
- 7.算法辅导·应用定制·读者交流
1.摘要
无人机集群路径规划是指根据任务需求为无人机群规划协同飞行路线的过程,与同质无人机集群相比,异质无人机集群能够整合多种机型优势,充分发挥各无人机平台的专长,在军民领域展现出更高的应用价值与经济效益。现有研究多集中于同质无人机集群的路径规划,而异质集群因各机型在动态约束和能耗模型上的差异,其路径规划问题面临更大挑战,且缺乏从功能视角统一描述的数学模型。为解决这一问题,本文首先构建了异质无人机集群的任务场景与组成结构,将路径规划问题建模为多目标优化问题,并提出异质集群设计的多目标进化算法HMOEA,该算法通过融合两种创新策略,有效平衡多个优化目标。
2.问题描述
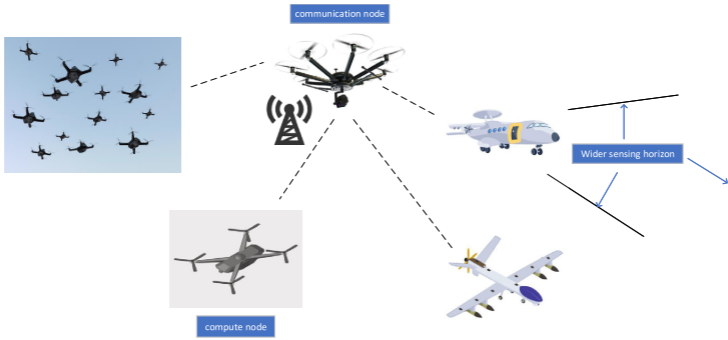
异构无人机集群组成结构
无人机集群采用异构架构,其中每架无人机承担不同角色与任务。集群由多种功能特性的无人机组成,能够高效执行多样化任务。集群中的无人机按功能划分为四种类型:计算型、通信中继型、探测增强型及无专用设备的普通型。探测型无人机可提供更广的视野范围以预测前方障碍物,并与集群共享信息实现协同飞行,但其计算决策能力较弱——这部分功能可由其他高性能无人机承担。通过确保有效的通信能力,该架构能够以更低经济成本实现更高价值功能,同时完成同等任务目标。
异构无人机集群数学模型
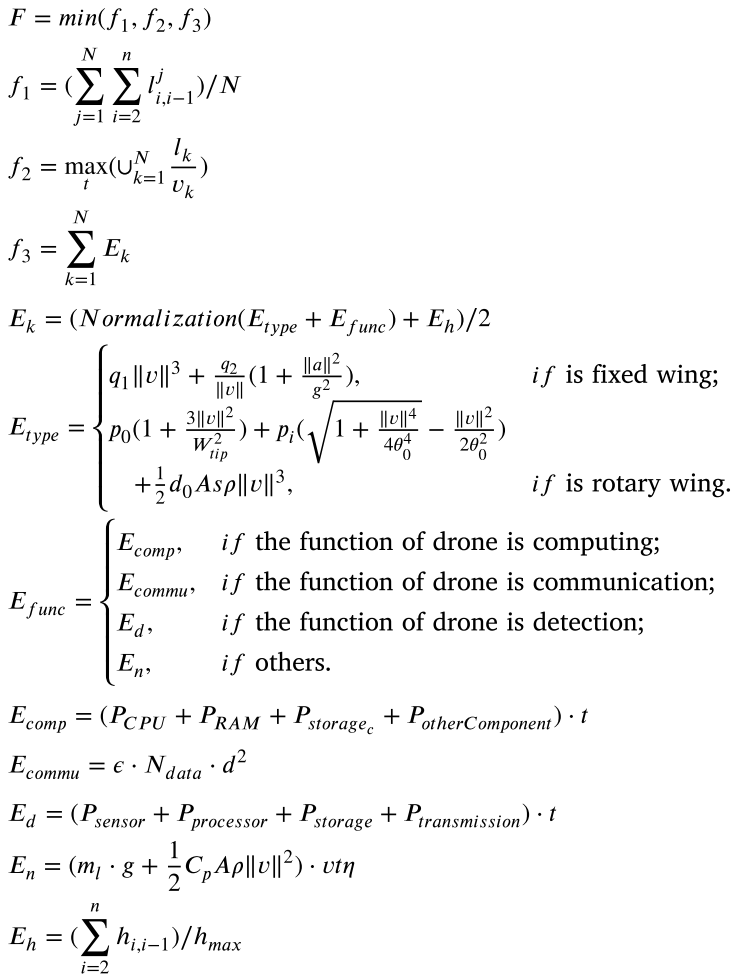
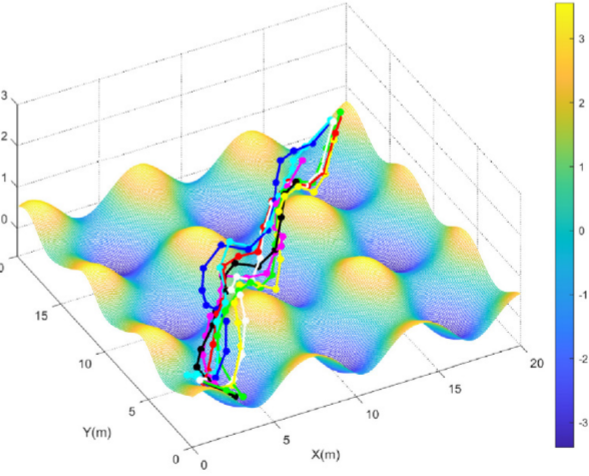
异构无人机集群松散编队路径规划问题旨在实现从起始点到目标点的航迹规划,需同时满足通信连通、机动约束、障碍规避与碰撞防止等多重要求。本研究将该问题建模为多目标优化问题,优化目标包括总能耗、路径总长度及最长飞行时间。
3.两种平衡机制多目标进化算法
基于最大平均差异的交配选择策略
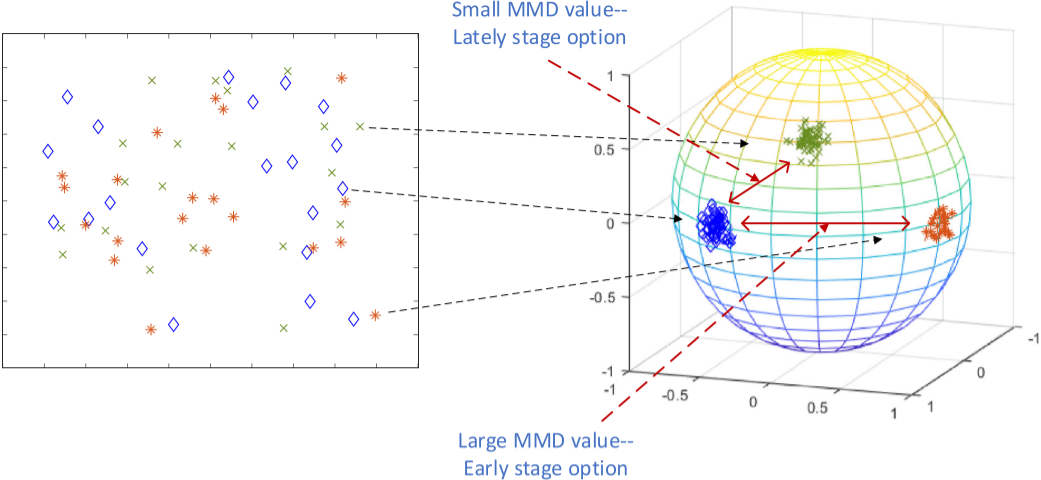
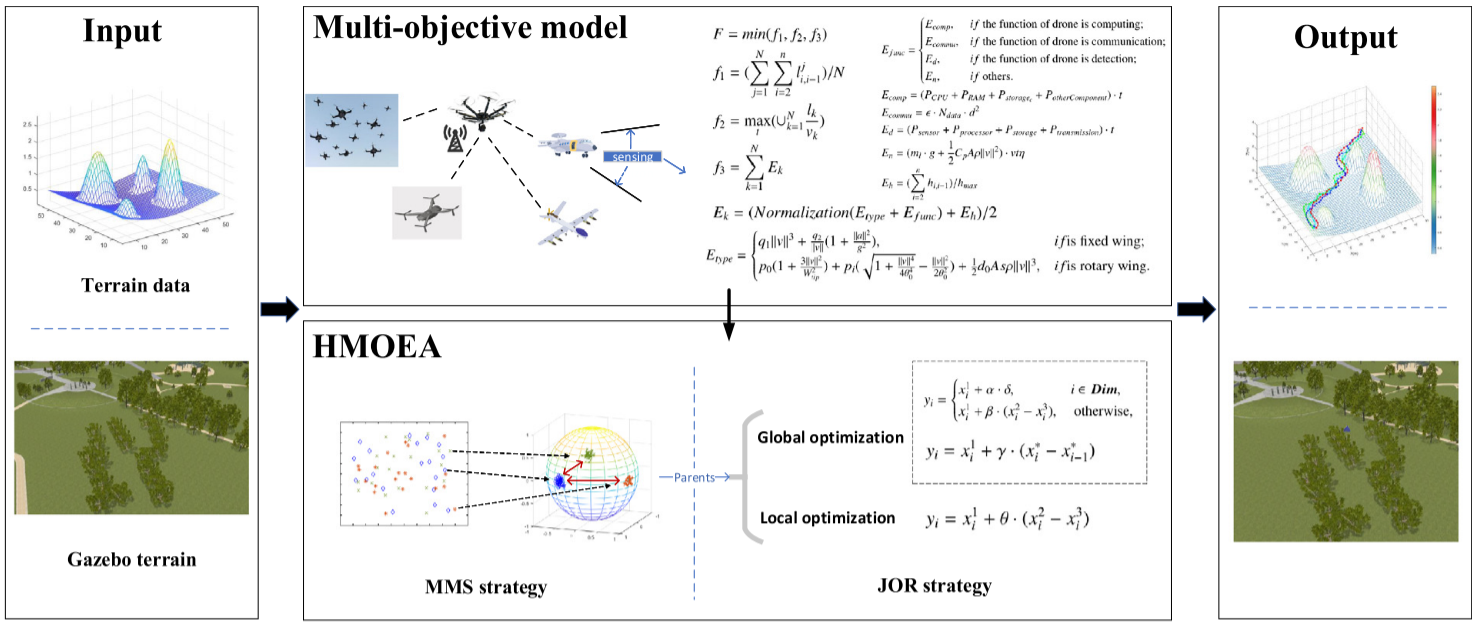
本文提出一种基于最大均值差异(MMD)的交配选择策略,通过量化个体间分布差异来动态调整搜索行为。在演化初期优先选择差异度大的个体作为父代,增强全局探索能力;在演化后期则侧重选择相似个体,加强局部开发效率。MMD作为再生核希尔伯特空间中的分布距离度量工具,能够有效处理高维决策变量的差异评估。
MMD2[F,X,Y]=1u(u−1)∑i≠juk(xi,xj)+1v(v−1)∑i≠jvk(yi,yj)−2uv∑i,j=1u,vk(xi,yj),\begin{aligned} \mathrm{MMD}^{2}[F,X,Y] & =\frac{1}{u(u-1)}\sum_{i\neq j}^{u}k\left(x_{i},x_{j}\right) \\ & +\frac{1}{v(v-1)}\sum_{i\neq j}^{v}k\left(y_{i},y_{j}\right) \\ & -\frac{2}{uv}\sum_{i,j=1}^{u,v}k\left(x_{i},y_{j}\right), \end{aligned} MMD2[F,X,Y]=u(u−1)1i=j∑uk(xi,xj)+v(v−1)1i=j∑vk(yi,yj)−uv2i,j=1∑u,vk(xi,yj),
k(x,x′)=exp(−∥x−x′∥2/(2σ2))k\left(x,x^{\prime}\right)=\exp\left(-\left\|x-x^{\prime}\right\|^{2}/\left(2\sigma^{2}\right)\right) k(x,x′)=exp(−∥x−x′∥2/(2σ2))
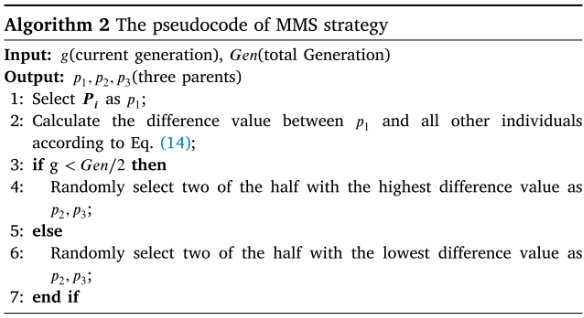
面向繁殖策略的全局与局部协同优化方法
融合全局与局部优化的协同繁殖策略(JOR)通过预设概率参数动态调整全局探索与局部开发的比重,有效平衡算法收敛性与多样性。在全局优化阶段,采用关键维度探索策略识别问题特征维度,并将无人机群划分为领导者-跟随者架构:对领导者关键维度施加显著扰动,非关键维度采用变异操作;局部优化阶段则侧重于在优势区域进行精细搜索。
yi={xi1+α⋅δ,i∈Dim,xi1+β⋅(xi2−xi3),otherwise,\left.y_{i}=\left\{ \begin{array} {ll}x_{i}^{1}+\alpha\cdot\delta, & i\in Dim, \\ x_{i}^{1}+\beta\cdot(x_{i}^{2}-x_{i}^{3}), & \text{otherwise,} \end{array}\right.\right. yi={xi1+α⋅δ,xi1+β⋅(xi2−xi3),i∈Dim,otherwise,
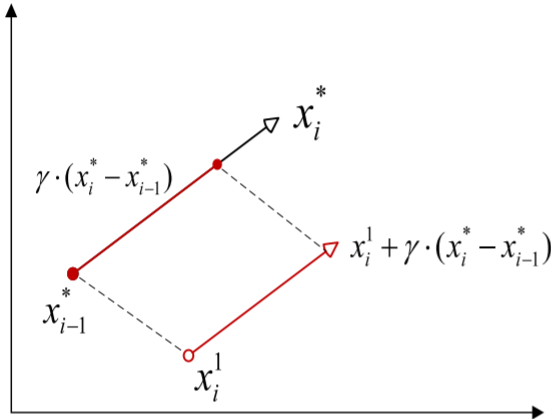
剩余无人机进化方法:
yi=xi1+γ⋅(xi∗−xi−1∗)y_i=x_i^1+\gamma\cdot(x_i^*-x_{i-1}^*) yi=xi1+γ⋅(xi∗−xi−1∗)
在局部优化中,无人机的所有维度都对子代进行变异:
yi=xi1+θ⋅(xi2−xi3)y_{i}=x_{i}^{1}+\theta\cdot(x_{i}^{2}-x_{i}^{3}) yi=xi1+θ⋅(xi2−xi3)
4.结果展示
5.参考文献
[1] Xu X, Xie C, Ma L, et al. Multi-objective evolutionary algorithm with two balancing mechanisms for heterogeneous UAV swarm path planning[J]. Applied Soft Computing, 2025, 173: 112927.
6.代码获取
xx
7.算法辅导·应用定制·读者交流
xx