深度学习基础:从原理到实践——第一章感知机(中)
1.3感知机的数学模型
1.3.1感知机的数学定义
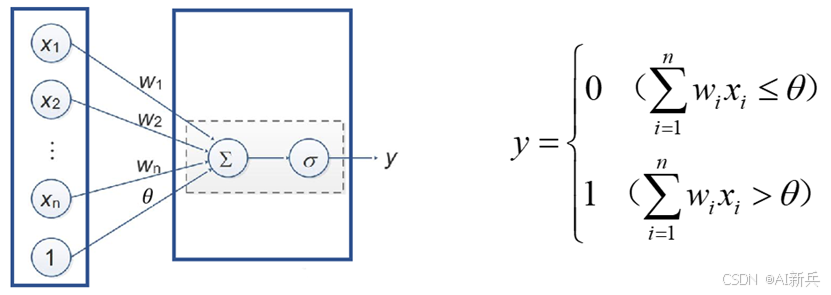
图4感知机模型
感知机的数学模型可以形式化地定义为:给定输入空间(特征空间)X ⊆ Rⁿ,输出空间 Y = {0, 1}。感知机是定义在特征空间上的如下函数:
f(x) = sign(w·x + b)
其中,w ∈ Rⁿ是权重向量,b ∈ R 是偏置,w・x 表示向量 w 和 x 的点积运算,sign (・) 是符号函数,定义为:
sign(z) = { 1, z ≥ 0; 0, z < 0 }
权重向量 w 和偏置 b 统称为感知机的模型参数。权重向量 w 决定了输入特征的重要性,偏置 b 则控制了分类边界的位置。从几何意义上看,w・x + b = 0 定义了特征空间中的一个超平面,称为分离超平面。
1.3.2权重和偏置的几何意义
在感知机模型中,权重向量 w 和偏置 b 具有明确的几何意义。权重向量 w 是分类超平面的法向量,它决定了超平面的方向。偏置 b 则决定了超平面距离原点的远近。
具体来说,对于超平面 w・x + b = 0,任意一点 x 到超平面的距离可以用公式表示为:
d = |w·x + b| / ||w||
其中 ||w|| 表示权重向量 w 的 L2 范数。这个距离公式揭示了感知机的分类机制:样本点到超平面的距离决定了分类的置信度。距离越大,分类的确定性越高;距离越小,分类的不确定性越大。
权重向量 w 的方向还决定了特征空间中不同方向上的重要性。权重的绝对值越大,对应的特征对分类结果的影响就越大。例如,如果 w₁的绝对值远大于其他权重分量,说明第一个特征在分类中起着主导作用。偏置 b 的作用类似于截距,它调整了超平面在特征空间中的位置,使得分类边界可以在空间中自由移动,而不改变其方向。
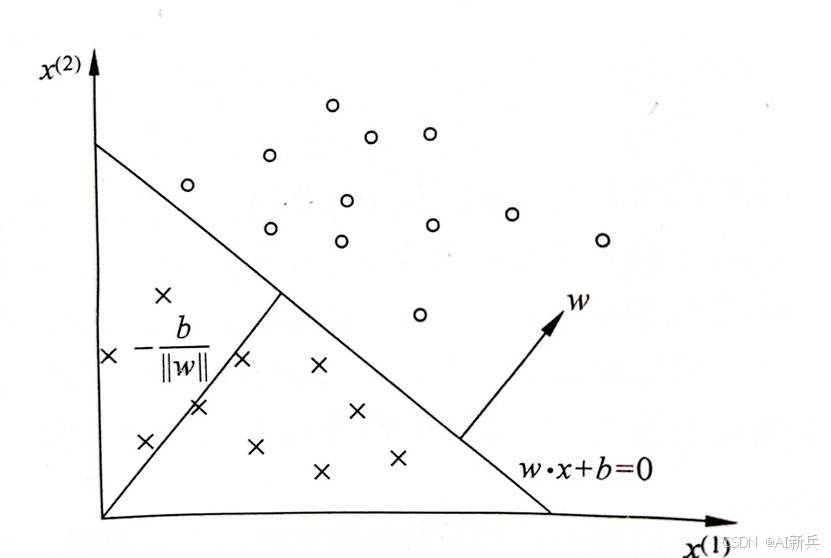
图 5感知机是一个线性分类器
1.3.3激活函数的选择与作用
感知机使用符号函数 sign (・) 作为激活函数,这是一个阶跃函数,在零点处不连续。激活函数的作用是将线性组合的结果转换为离散的分类标签。除了符号函数,感知机也可以使用其他激活函数,如 sigmoid 函数、tanh 函数等,但这些激活函数主要用于多层感知机中。
常用激活函数如下:
1)阶跃函数
激活函数以阈值为界,一旦输入超过阈值,就切换输出。这样的函数称为“阶跃函数”。
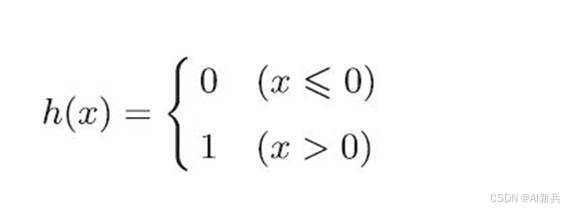
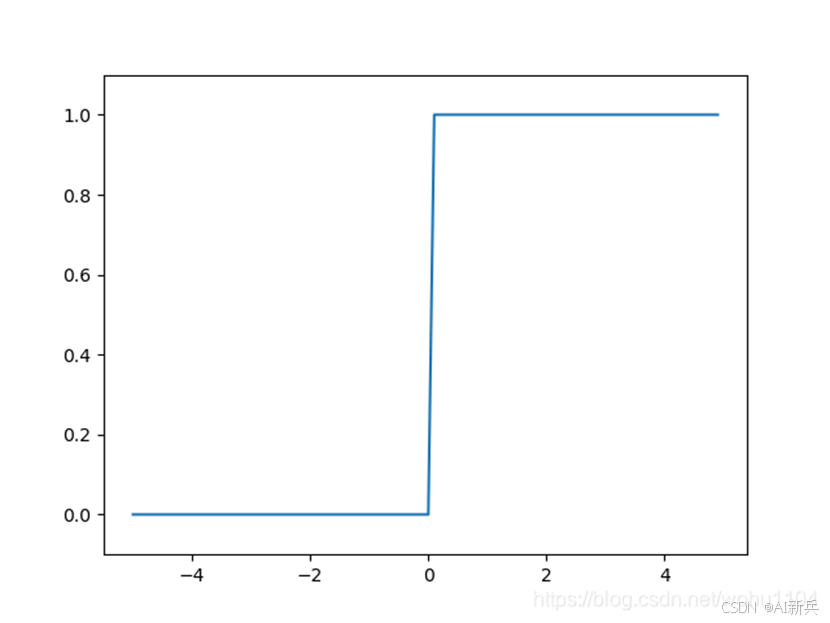
图 6阶跃函数公式及图形
2)sigmoid 函数
神经网络中经常使用的一个激活函数是sigmoid 函数:
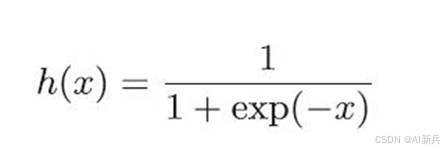
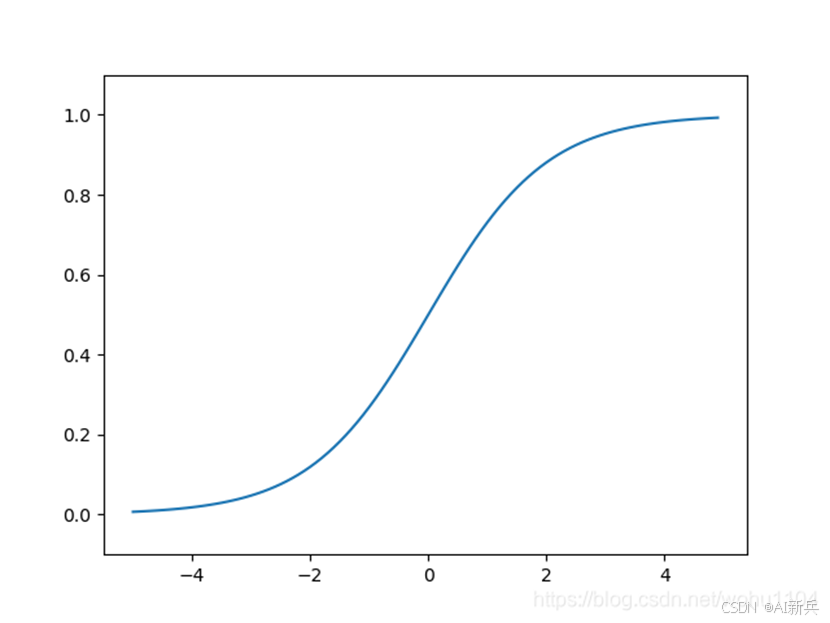
图 7 sigmoid 函数公式及图形
3)ReLU 函数
在神经网络发展的历史上, sigmoid 函数很早就开始被使用了,而最近则主要使用 ReLU 线性整流函数 ( Rectified Linear Unit )函数。
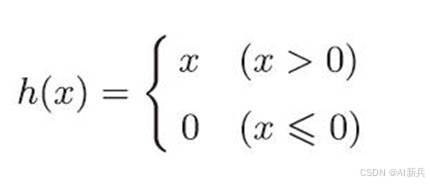
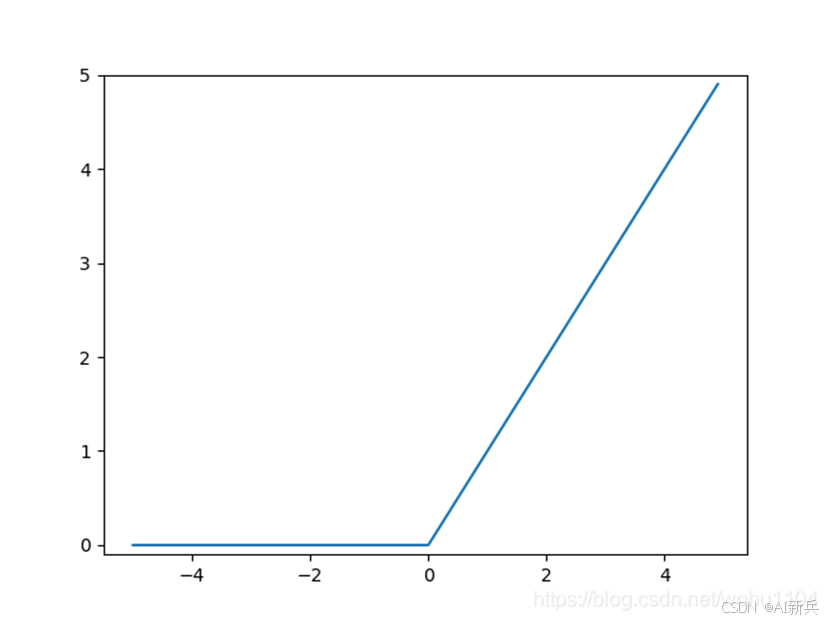
图 8 ReLU 函数公式及图形
4)tanh 函数
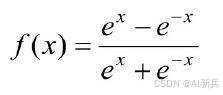
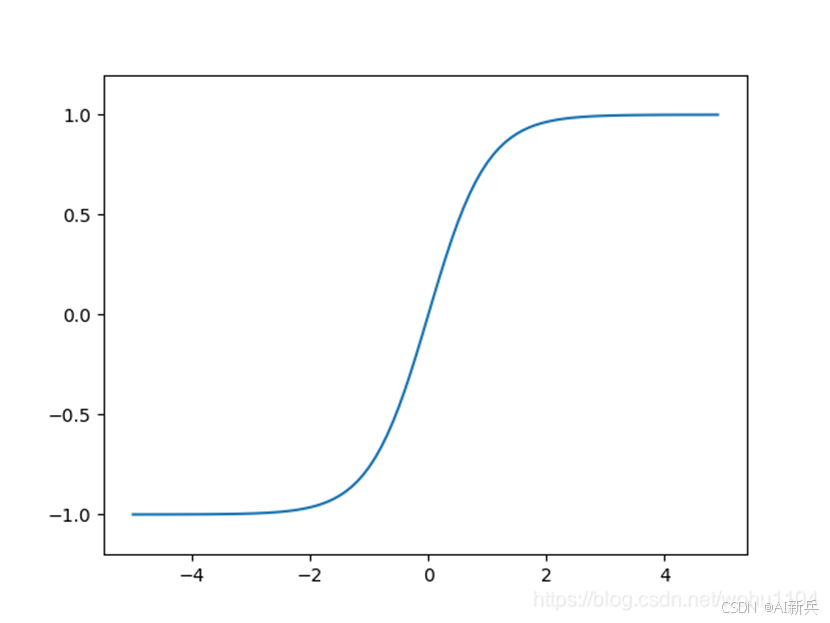
图 9 tanh 函数公式及图形
激活函数的选择对感知机的性能有重要影响。符号函数的优点是计算简单,输出明确,但它的不连续性导致无法使用梯度下降等基于导数的优化算法。这也是为什么感知机需要使用专门的学习算法,而不能直接应用通用的梯度下降方法。
在实际应用中,有时会使用平滑的激活函数来近似符号函数,如使用 sigmoid 函数的阈值输出。但这种做法改变了感知机的本质特性,使其不再是严格意义上的线性分类器。因此,在单层感知机中,符号函数仍然是最标准的选择。