PID--积分项I
含有比例项和积分项的PID输出值:
积分项的输出值取决于0~t所有时刻误差的积分,与历史时刻有关。积分项将历史所有时刻的误差累积,乘上积分项系数
后作为积分项输出值, 积分项用于弥补纯比例项产生的稳态误差,若系统持续产生误差,则积分项会不断累积误差,直到控制器产生动作,让稳态误差消失.
越大,积分项权重越大,稳态误差消失越快,但系统滞后性也会随之增加
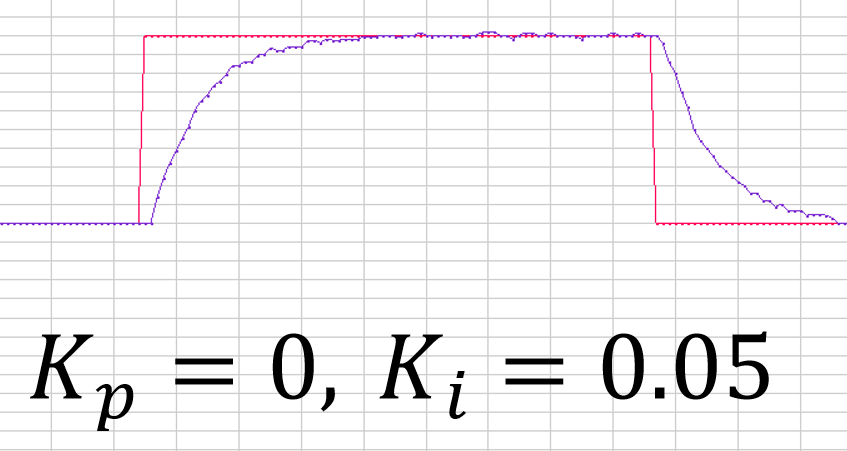
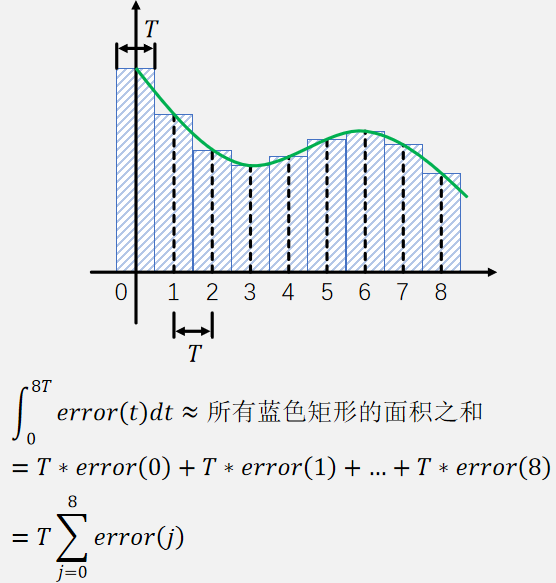 我们的软件层不能一直只监控误差的积分,即使是加了FreeRTOS等实时操作系统也做不到硬件那种连续性,所有我们的积分是离散化的,每个周期T采样一次进行积分。如果我们抛出比例项,只保留积分项
我们的软件层不能一直只监控误差的积分,即使是加了FreeRTOS等实时操作系统也做不到硬件那种连续性,所有我们的积分是离散化的,每个周期T采样一次进行积分。如果我们抛出比例项,只保留积分项,那从零时刻起,Out会逐渐逼近Target,而且在这个过程中,Error是不断减少的,所以越靠近Target增长越慢,这就是滞后性,积分项能确保Actual达到Target(前提是Target值合理,Out取最大值前Actual能达到Target),积分项存在,则只要存在误差,Out就会不断改变,无论初态是高是低,经积分项作用最终都会达到Target
消除稳态误差:
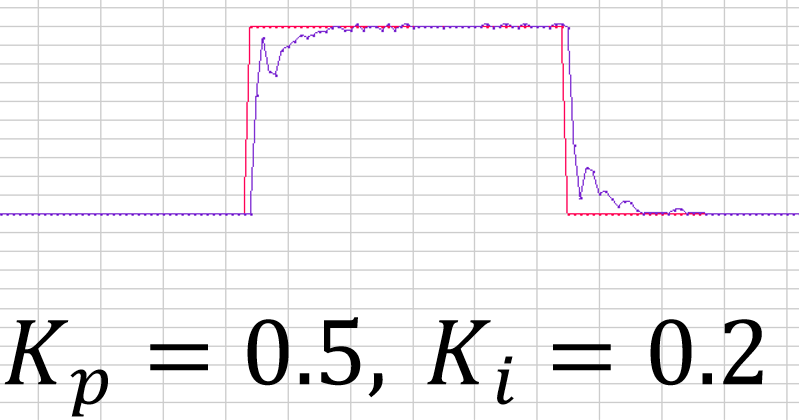
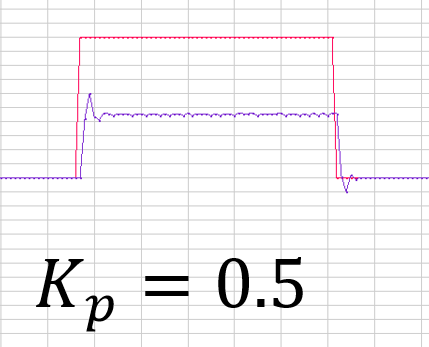
通过积分项的作用,稳态误差被消除,但是也埋下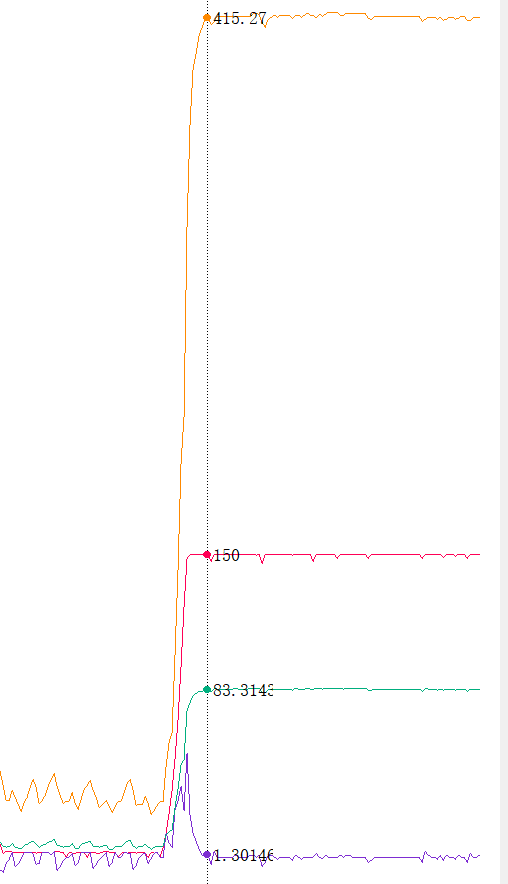 了一个问题,即Out值与历史有关了,积分值是一个较大的值,对于电机驱动来说如果Target设置为150,紫色是误差值 ,橙色是积分值,红色目标值Target,绿色是Out值。 此时的K_P = K_I = 0.2 积分项的积分值在很短的时间内就积累起来了,而比例项的误差值涨幅不高并且之后降为了0,所以PI控制的情况下最终实际上Out只取决于积分项I了。 我们设置的K_I在这种电机控制下占比还是比较的大,没有太高普遍参考意义 如果这里K_I是0.05或更小值是,积分值会非常高,这会降低响应速度,增大之后性(这里的响应不同于比例项P的响应,比例项到达稳态误差后,积分项还没从之前的历史影响走出来,作用的较慢)
了一个问题,即Out值与历史有关了,积分值是一个较大的值,对于电机驱动来说如果Target设置为150,紫色是误差值 ,橙色是积分值,红色目标值Target,绿色是Out值。 此时的K_P = K_I = 0.2 积分项的积分值在很短的时间内就积累起来了,而比例项的误差值涨幅不高并且之后降为了0,所以PI控制的情况下最终实际上Out只取决于积分项I了。 我们设置的K_I在这种电机控制下占比还是比较的大,没有太高普遍参考意义 如果这里K_I是0.05或更小值是,积分值会非常高,这会降低响应速度,增大之后性(这里的响应不同于比例项P的响应,比例项到达稳态误差后,积分项还没从之前的历史影响走出来,作用的较慢)
积分限幅
要解决的问题:如果执行器因为卡住、断电、损坏等原因不能消除误差,则误差积分会无限制加大,进而达到深度饱和状态,此时PID控制器会持续输出最大的调控力,即使后续执行器恢复正常,PID控制器在短时间内也会维持最大的调控力,直到误差积分从深度饱和状态退出 积分限幅
实现思路:对误差积分或积分项输出进行判断,如果幅值超过指定阈值,则进行限制
ErrorInt += Error0;
if(ErrorInt > Limit){ErrorInt = Limit;}
else if(ErrorInt < -Limit){ErrorInt = -Limit;}
Out = K_P * Error0 + K_I * ErrorInt;
Int是积分integral的缩写
Limit一般设置为Out的最大值,令Limit = K_I * ErrorInt。
也可以直接对积分项I进行限幅
I += K_I * Error0;
if(I > Limit){I = Limit;}
else if(I < -Limit){I = -Limit;}
Out = K_P * Error0 + I + K_D * (Error0 - Error1);
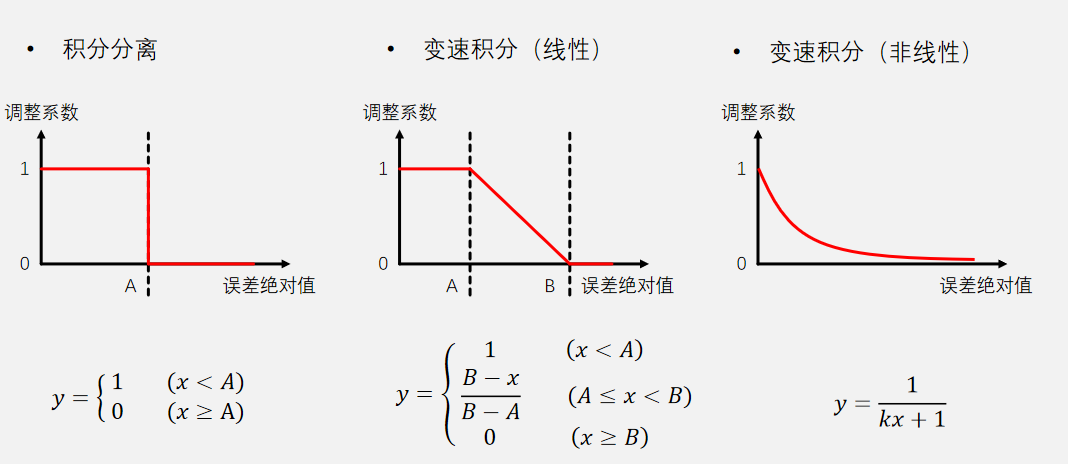
积分分离
对于一些精准调控,如转盘位置,积分项导致的滞后性会导致当Actual达到Target时Out不能及时的归零,需要积分抵消才能停止。
要解决的问题:积分项作用一般位于调控后期,用来消除持续的误差,调控前期一般误差较大且不需要积分项作用,如果此时仍然进行积分,则调控进行到后期时,积分项可能已经累积了过大的调控力,这会导致超调
积分分离实现思路:对误差大小进行判断,如果误差绝对值小于指定阈值,则加入积分项作用,反之,则直接将误差积分清零或不加入积分项作用
//求绝对值
if(Error0 < 0){ErrorValve = -Error0;}
else{ErrorValve = Error0;}
//阈值比较
if(K_I != 0 && ErrorValve <= Value){ErrorInt += Error0;}
else{ErrorInt = 0;}Out = K_P * Error0 + K_I * ErrorInt;阈值Value根据稳态误差确定,使K_I = 0,观察稳态误差,并且以此为基础适当扩大阈值,给积分项一定预热时间。
积分激活法:
ErrorInt += Error0;
uint8_t i = 0;if(Error0 < 0){ErrorValve = -Error0;}
else{ErrorValve = Error0;}
if(K_I != 0 && ErrorValve <= Value){i = 1;}
else{i = 0;}Out = K_P * Error0 + i * K_I * ErrorInt;变速积分
要解决的问题:积分项作用一般位于调控后期,用来消除持续的误差,调控前期一般误差较大且不需要积分项作用,如果此时仍然进行积分,则调控进行到后期时,积分项可能已经累积了过大的调控力,这会导致超调。
变速积分一般是对积分分离的优化。
积分分离实现思路:对误差大小进行判断,如果误差绝对值小于指定阈值,则加入积分项作用,反之,则直接将误差积分清零或不加入积分项作用
if(Error0 < 0){ErrorValve = -Error0;}
else{ErrorValve = Error0;}
if(K_I != 0 && ErrorValve <= Value){i = 1 /(k * ErrorValve + 1);}
else{i = 0;}
ErrorInt += i * Error0;
Out = K_P * Error0 + i * K_I * ErrorInt + K_D * (Error0 - Error1);积分项在弥补比例项不足的同时也产生了新的问题,根据实际情况合理调参,进行优化,才能使算法达到一个比较理想的状态。