磁共振成像原理(理论)19:基本成像原理 (Basic Imaging Methods) - 三维成像
之前的内容介绍到:在没有梯度磁场的情况下,射频脉冲激励后产生的信号(FID信号和Echo信号)将来自整个三维成像物体(该成像物体一般就是三维的)。
换句话说,从整个物体产生信号比从有限区域产生信号更容易。三维成像的挑战在于区分来自不同空间位置的所有信号分量。实现这一目标的方法有很多,最简单的大概是多切片成像方法,该方法:
- 首先基于选层梯度+射频脉冲进行选择性激发,把三维问题降低到二维;
- 然后通过二维编码,即相位编码和频率编码完成K空间覆盖。
在施加射频脉冲时同时施加选层梯度,可将上述三维成像转化为多个切片成像,而每一个切片成像都是二维成像。因此,该方法通常会产生多个二维图像。
对于真正的三维成像,使用非选择性脉冲进行信号生成,所有三维信息必须编码到激活信号中。由于磁共振信号的性质,沿一维的信息自然进行频率编码,而沿其他二维的信息可以进行相位或频率编码。无论采用何种编码方案,通用成像方程均为三维傅里叶变换形式:
S(kx,ky,kz)=∫−∞∞∫−∞∞∫−∞∞I(x,y,z)e−i2π(kxx+kyy+kzz)dxdydz(5.110) S(k_x,k_y,k_z) = \int_{-\infty}^{\infty}\int_{-\infty}^{\infty}\int_{-\infty}^{\infty} I(x,y,z)e^{-i2\pi(k_xx + k_yy + k_zz)} dx dy dz \tag{5.110} S(kx,ky,kz)=∫−∞∞∫−∞∞∫−∞∞I(x,y,z)e−i2π(kxx+kyy+kzz)dxdydz(5.110)
其中 S(kx,ky,kz)S(k_x,k_y,k_z)S(kx,ky,kz) 表示kkk空间信号,I(x,y,z)I(x,y,z)I(x,y,z) 表示三维物体分布函数。该方程建立了图像空间与kkk空间之间的傅里叶变换关系,是三维磁共振成像的数学基础。
不同编码方案仅导致三维kkk空间的不同采样模式。为证明此点,考虑下图所示的三维相位编码成像序列.
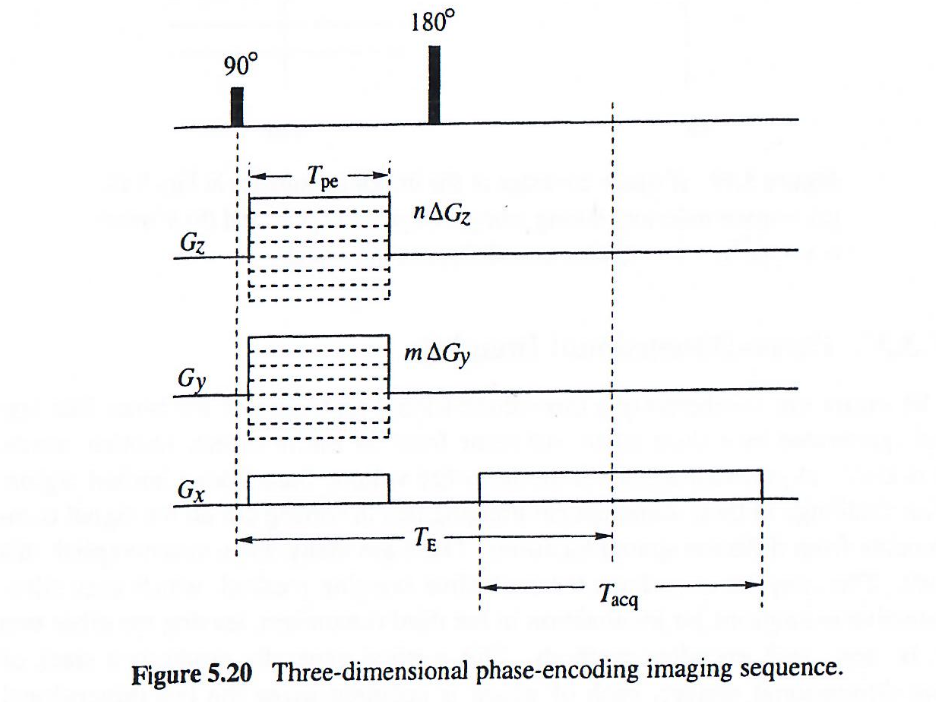
其中xxx方向进行频率编码,而yyy和zzz方向进行相位编码。在这种情况下,kkk空间由平行于 kxk_xkx 轴的直线填充,其数学描述为:
{kx=γˉGx(t−TE)ky=γˉGyTpekz=γˉGzTpe∣t−TE∣<Tacq/2(5.111)
\begin{cases}
k_x = \bar \gamma G_x(t - T_E) \\
k_y = \bar \gamma G_y T_{pe} \\
k_z = \bar \gamma G_z T_{pe}
\end{cases} \quad |t - T_E| < T_{acq}/2 \tag{5.111}
⎩⎨⎧kx=γˉGx(t−TE)ky=γˉGyTpekz=γˉGzTpe∣t−TE∣<Tacq/2(5.111)
其中 GxG_xGx 为常数,但 Gy=mΔGyG_y = m\Delta G_yGy=mΔGy 且 Gz=nΔGzG_z = n\Delta G_zGz=nΔGz。这里 γˉ\bar \gammaγˉ 是旋磁比,TET_ETE 是回波时间,TpeT_{pe}Tpe 是相位编码时间,TacqT_{acq}Tacq 是数据采集时间窗。通过改变 mmm 和 nnn 的值,可以在 kyk_yky-kzk_zkz 平面内系统地遍历不同的相位编码步进,从而实现对三维k空间的均匀采样。
作为另一个示例,下图展示了另一种三维频率编码成像序列。
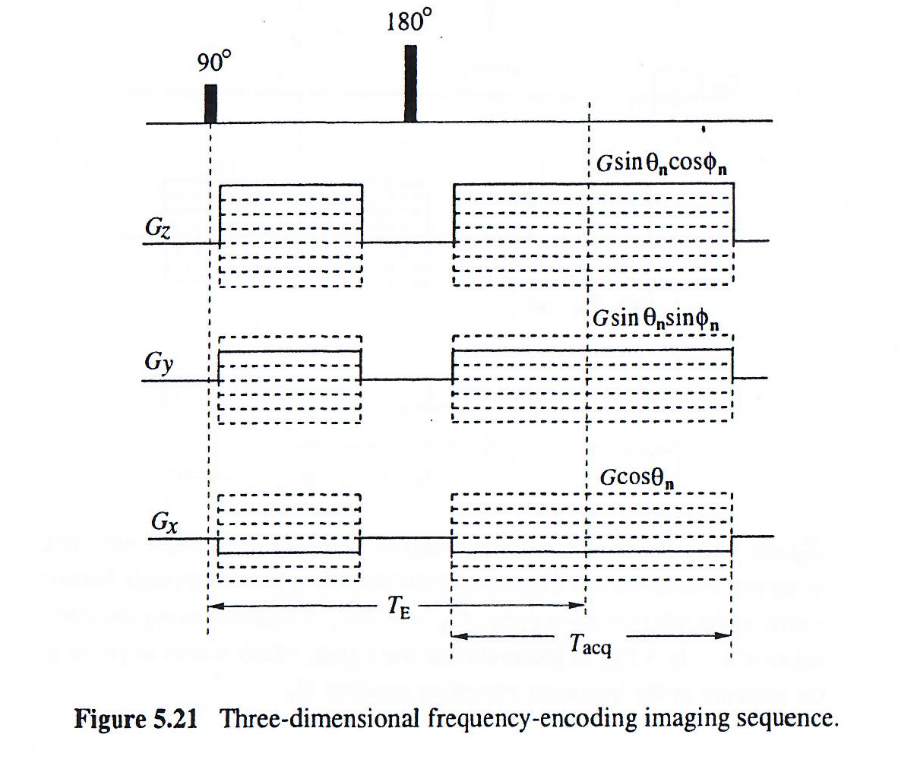
与上一个范例不同在于,x,y,zx,y,zx,y,z方向都是进行频率编码,kkk空间现在由通过原点的径向线填充。这可以通过注意每个频率编码信号的以下k空间采样轨迹方程来理解:
{kx=γˉGx(t−TE)ky=γˉGy(t−TE)kz=γˉGz(t−TE)∣t−TE∣<Tacq/2(5.112)
\begin{cases}
k_x = \bar \gamma G_x(t - T_E) \\
k_y = \bar \gamma G_y(t - T_E) \\
k_z = \bar \gamma G_z(t - T_E)
\end{cases} \quad |t - T_E| < T_{acq}/2 \tag{5.112}
⎩⎨⎧kx=γˉGx(t−TE)ky=γˉGy(t−TE)kz=γˉGz(t−TE)∣t−TE∣<Tacq/2(5.112)
其中 GxG_xGx、GyG_yGy 和 GzG_zGz 根据以下公式选择:
{Gx=GsinθncosϕmGy=GsinθnsinϕmGz=Gcosθn(5.113)
\begin{cases}
G_x = G\sin\theta_n\cos\phi_m \\
G_y = G\sin\theta_n\sin\phi_m \\
G_z = G\cos\theta_n
\end{cases} \tag{5.113}
⎩⎨⎧Gx=GsinθncosϕmGy=GsinθnsinϕmGz=Gcosθn(5.113)
其中 GGG 是梯度幅值,θn\theta_nθn 和 ϕm\phi_mϕm 分别表示极角和方位角。通过系统地改变这些角度,可以实现对三维kkk空间的径向采样模式。
上述讨论表明,三维成像的概念与二维成像没有太大不同。然而,三维成像确实呈现一些独特的实际问题,因为覆盖三维kkk空间需要更多编码次数。后续将讨论与有限数据采集时间、分辨率和信噪比相关的一些实际成像问题。