一款基于ESP32的导航小车
ref:基于视觉同时定位与建图技术的智能小车设计
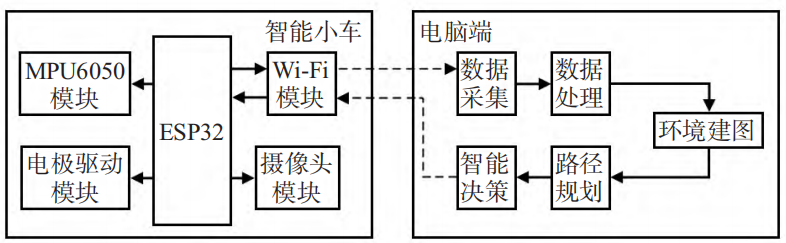
架构设计: 基 于 双 核 Tensilica Xtensa LX6 处 理 器 的ESP32 作为主控芯片,其内置的 Wi-Fi 和蓝牙模块支持 WiFi 802.11 b /g /n 和蓝牙 4.2 /5.0 标准,能够实现小车与外部设备的无线通信
图像灰度化: 通过加权平均将其转换为单通道灰度值:Gray = 0.299R + 0.587G + 0.114B,权重系数是根据人眼对不同颜色分量的感知权重来确定的
视觉 SLAM算法: ORB-SLAM2进行特征点的提取与匹配,使用ORB算法提取特征点(特征点描述符通过BRIEF算法计算),根据特征点匹配结果,通过 PnP计算位姿,并执行 BA优化位姿与地图点,之后使用 MPU 的加速度和角速度数据更新位姿。
路径跟踪: 依赖目标点跟当前位置距离差以及朝向角度,公式如下:
