ORB_SLAM2原理及代码解析:Frame::UnprojectStereo() 函数
1 作用
把当前帧中的第
i个特征点反投影到世界坐标系(如果有深度信息)。
2 所属位置及代码
(1)声明:include/Frame.h
// Backprojects a keypoint (if stereo/depth info available) into 3D world coordinates.cv::Mat UnprojectStereo(const int &i);(2)定义:src/Frame.cc
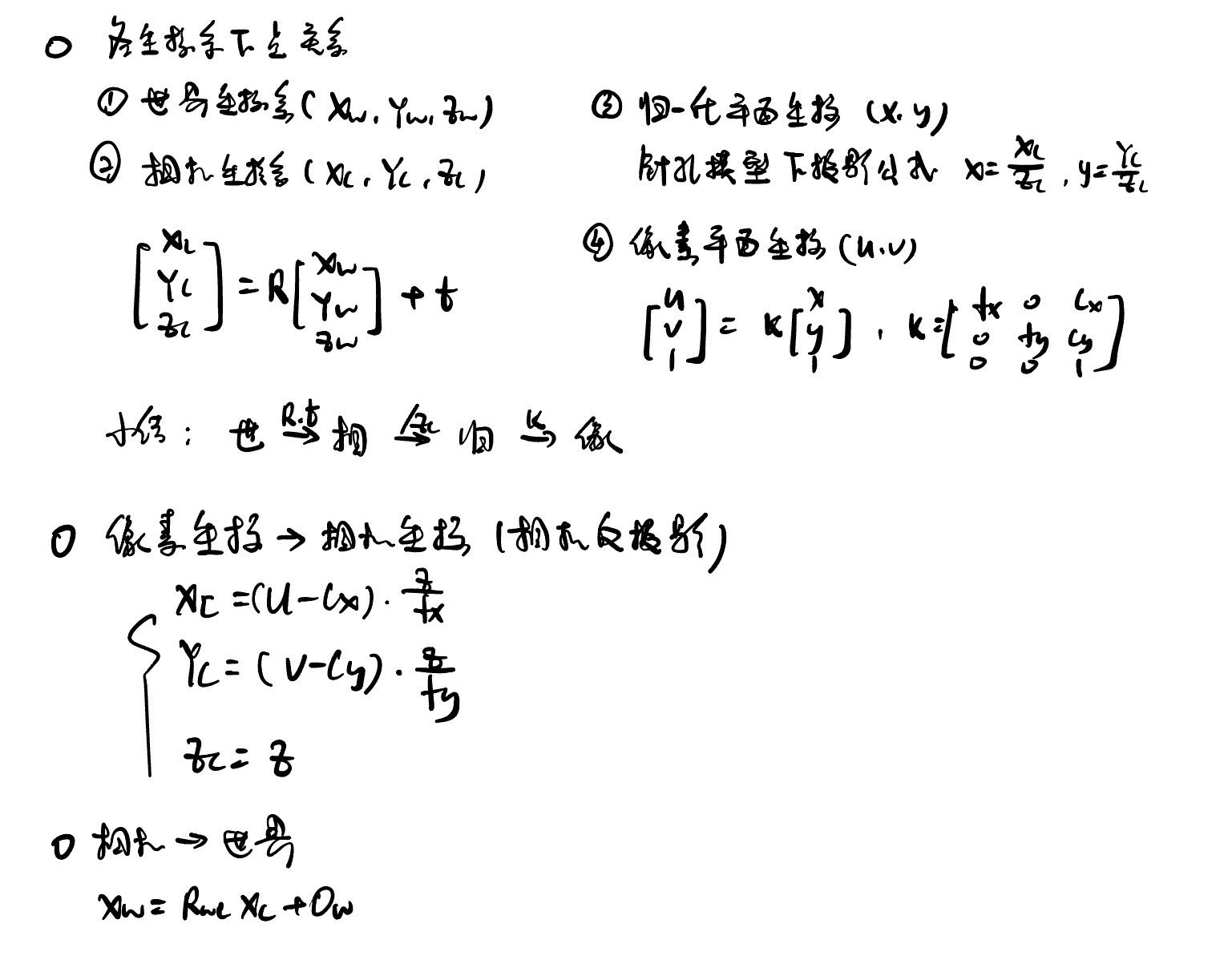
cv::Mat Frame::UnprojectStereo(const int &i) {const float z = mvDepth[i];if(z>0){const float u = mvKeysUn[i].pt.x;const float v = mvKeysUn[i].pt.y;const float x = (u-cx)*z*invfx;const float y = (v-cy)*z*invfy;cv::Mat x3Dc = (cv::Mat_<float>(3,1) << x, y, z);return mRwc*x3Dc+mOw;}elsereturn cv::Mat(); }
3 原理解析
思路:像素坐标-去畸变-归一化-相机坐标-世界坐标
mvDepth[i]:存储第i个特征点的深度;
mvKeysUn[i]:去畸变后的关键点;
(u,v):是图像平面上的像素坐标
3.1 const float u = mvKeysUn[i].pt.x;
const float v = mvKeysUn[i].pt.y;
ORB_SLAM2中在ORB提取特征点时已经“去畸变”,得到的是去畸变后的像素坐标。
3.2 const float x = (u-cx)*z*invfx;
const float y = (v-cy)*z*invfy;
去畸变后的像素坐标转化为相机坐标。
3.3 cv::Mat x3Dc = (cv::Mat_<float>(3,1) << x, y, z);
把反投影(像素坐标-相机坐标)得到的相机坐标系下的三维点
构造成 OpenCV 的
cv::Mat矩阵。
3.4 return mRwc*x3Dc+mOw;
输出世界坐标系下的坐标。注意相机初始化是用的是左目的数据。