YOLOv8 —— Anchor-Free 设计
下面我将从历史背景、核心思想、技术实现、优势分析到实际效果,层层递进的介绍。
一、什么是 Anchor-Free?
Anchor-Free(无锚框)是一种目标检测范式,它摒弃了预定义的 anchor boxes,直接在特征图的每个位置预测目标的存在及其边界框参数。
对比理解:
| 方法 | 核心思想 |
|---|---|
| Anchor-Based(如 YOLOv3/v5) | “每个位置预设多个框(anchors),判断哪个框最像目标” |
| Anchor-Free(如 YOLOv8) | “每个位置直接说:这里有目标,它的中心在 (x,y),宽高是 (w,h)” |
二、Anchor-Based 的历史与痛点
1. 起源
-
Faster R-CNN (2015) 首次引入 anchor boxes:
- 在特征图每个位置预设 9 种尺度/长宽比的矩形框
- 分类器判断每个 anchor 是否包含目标
- 回归器微调 anchor 位置
-
YOLOv2/v3/v4/v5 继承此思想:
- 使用 k-means 聚类训练集 bbox,得到先验 anchor 尺寸
- 每个 grid cell 负责预测多个 anchor(如 YOLOv5 用 3 个)
2. 三大核心痛点
(1)依赖数据集先验
- 必须对训练集做 k-means 聚类获取 anchor 尺寸
- 若测试集分布偏移(如 COCO → 航拍图),anchor 不匹配 → 性能下降
(2)超参数敏感
- anchor 数量(3/5/9?)
- IoU 阈值(正负样本划分)
- 尺寸设计(是否覆盖小/大目标?)
(3)正样本分配复杂
- 一个 GT 可能匹配多个 anchor
- 需处理“一个目标被多个预测框响应”的冗余问题
- NMS 压力大
📌 本质问题:Anchor 是一种强先验假设,限制了模型的表达自由度。
三、Anchor-Free 的核心思想
1. 基本理念
“每个目标由其在特征图上的中心点(或关键点)唯一表示,无需预设框。”
- 摒弃预定义 anchor
- 每个 grid cell 只预测一个 bbox
- 直接回归 相对于 grid cell 的偏移量
2. 代表工作演进
| 方法 | 年份 | 核心思想 |
|---|---|---|
| CornerNet | 2018 | 用左上角+右下角点表示 bbox |
| CenterNet | 2019 | 用中心点 + 偏移 + 尺寸表示 bbox |
| FCOS | 2019 | 每个点预测到 bbox 四条边的距离 |
| YOLOX | 2021 | YOLO 系列首个 Anchor-Free 版本 |
| YOLOv8 | 2023 | 继承 YOLOX 思想,结合 DFL + TAL |
四、YOLOv8 Anchor-Free 的具体实现
1. 预测内容(每个 grid cell)
对特征图上位置 (i, j)(对应原图区域),YOLOv8 预测:
| 分量 | 含义 | 范围 | 预测方式 |
|---|---|---|---|
tx | 中心点 x 相对于 grid 左边界的偏移 | [0, 1] | DFL 分布 |
ty | 中心点 y 相对于 grid 上边界的偏移 | [0, 1] | DFL 分布 |
tw | bbox 宽度(归一化到图像宽) | [0, 2] | DFL 分布 |
th | bbox 高度(归一化到图像高) | [0, 2] | DFL 分布 |
✅ 关键:不再有 “哪个 anchor 负责哪个目标” 的匹配逻辑。
2. 坐标解码公式(归一化空间)
设特征图尺寸为 H × W,grid cell 坐标为 (i, j)
模型输出 DFL 解码后得到 (tx, ty, tw, th)
则归一化边界框为:
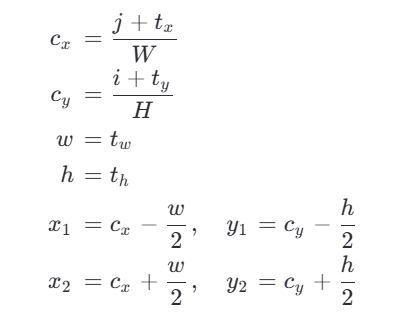
📌 所有坐标均在
[0, 1](中心点)或[0, 2](宽高)范围内。
3. 与 YOLOv5 Anchor-Based 的输出对比
| 项目 | YOLOv5(Anchor-Based) | YOLOv8(Anchor-Free) |
|---|---|---|
| 每 grid 预测数 | 3(3 anchors) | 1 |
| 输出通道数 | 3 × (nc + 5) | nc + 4×17 |
| 坐标含义 | 相对于 anchor 的偏移 | 相对于 grid cell 的绝对偏移 |
| 标签分配 | 基于 IoU 与 anchor 匹配 | 基于预测质量动态分配(TAL) |
| 是否需 anchor 文件 | 是(.yaml 中定义) | 否 |
💡 YOLOv8 的检测头输出没有 anchor 维度,结构更简洁。
五、Anchor-Free 如何提升泛化能力?
1. 去先验化(Prior-Free)
- 不依赖训练集 bbox 分布
- 在跨域场景(如 COCO → 自动驾驶)表现更稳定
2. 简化优化目标
- 每个目标只由最接近其中心的 grid cell 负责
- 避免多个 anchor 竞争同一目标
- 梯度更集中,训练更稳定
3. 与 TAL 完美契合
- TAL 根据
(cls_score^α × IoU^β)动态选择正样本 - Anchor-Free 提供干净的预测空间(无 anchor 干扰)
- 高质量预测(高 cls + 高 IoU)自然被选中
4. 对极端比例目标更友好
- Anchor-Based:若目标长宽比超出 anchor 范围,匹配 IoU 低
- Anchor-Free:直接回归任意尺寸,无此限制
📊 实验表明:在 VisDrone(小目标密集)和 SKU-110K(极端宽高比)数据集上,YOLOv8 比 YOLOv5 mAP 高 2~3 个点。
六、Anchor-Free 的潜在挑战与 YOLOv8 的应对
挑战 1:中心点定位不准 → 检测失败
- 问题:若目标中心落在 grid 边界,可能被相邻 grid 误判
- YOLOv8 应对:
- 使用 DFL 提升中心点定位精度(亚像素级)
- 高分辨率 P3 特征图(80×80) 捕捉小目标中心
挑战 2:密集目标中心重叠
- 问题:多个目标中心落在同一 grid cell
- YOLOv8 应对:
- TAL 动态分配:即使同一 grid,也可分配多个正样本(通过 top-k)
- NMS 后处理:过滤重叠框
🔍 实际上,YOLOv8 的每个 grid cell 仍可预测多个目标(通过 TAL 分配多个 GT 到同一位置),只是每个预测只对应一个 bbox,而非多个 anchor。
挑战 3:训练初期正样本稀疏
- 问题:Anchor-Free 初始预测质量低,TAL 难以分配正样本
- YOLOv8 应对:
- Warmup 阶段:前 3 epoch 使用更宽松的分配策略
- Mosaic 增强:增加目标多样性,提升初期学习信号
七、与 YOLOX Anchor-Free 的区别
YOLOv8 并非简单照搬 YOLOX,而是在其基础上优化:
| 特性 | YOLOX | YOLOv8 |
|---|---|---|
| Head | Decoupled | Decoupled + DFL |
| 标签分配 | SimOTA | Task-Aligned Assigner (TAL) |
| 回归方式 | 直接 L1 + IoU | DFL + CIoU |
| 主干网络 | CSPDarknet | CSPDarknet + C2f |
| 多任务支持 | 仅检测 | 检测+分割+姿态 |
✅ YOLOv8 的 Anchor-Free 是 “YOLOX 思想 + Ultralytics 工程优化” 的产物。
八、可视化理解
Anchor-Based(YOLOv5)
Grid Cell (i,j)
│
├─ Anchor 1 (small) → Predict Box 1
├─ Anchor 2 (medium) → Predict Box 2
└─ Anchor 3 (large) → Predict Box 3
→ 3 个预测,需匹配哪个 anchor 负责 GT
Anchor-Free(YOLOv8)
Grid Cell (i,j)
│
└─ Direct Prediction → Single Box
→ 1 个预测,直接回归 bbox
九、总结:Anchor-Free 为何是 YOLOv8 的关键创新?
| 维度 | 优势 |
|---|---|
| 设计简洁性 | 无需 anchor 聚类,配置文件更简单 |
| 训练稳定性 | 正样本分配更合理,收敛更快 |
| 泛化能力 | 跨数据集、跨域表现更鲁棒 |
| 部署友好 | 模型结构统一,ONNX 导出更干净 |
| 精度提升 | 在 COCO 上比 YOLOv5 高 1~2 mAP |
🌟 Anchor-Free 不仅是技术选择,更是 YOLO 系列“去工程化、重本质”的体现——让模型直接学习“哪里有目标、目标多大”,而非“哪个预设框最像目标”。