现代控制理论4——第3章线性控制系统的能控性和能观性(1)
摘要:本文主要内容为现代控制理论第3章线性控制系统的能控性和能观性的前半部分内容。
声明:本文章内容整理于浙江大学王建全副教授的MOOC课程《现代控制理论》,仅作个人学习使用,若有侵权,请联系删除。
文章阅读推荐顺序:
1、现代控制理论1——第1章控制系统的状态空间表达式(1)
2、现代控制理论2——第1章控制系统的状态空间表达式(2)
3、现代控制理论3——第2章控制系统状态空间表达式的解
4、本文
1.1 线性定常系统的能控性
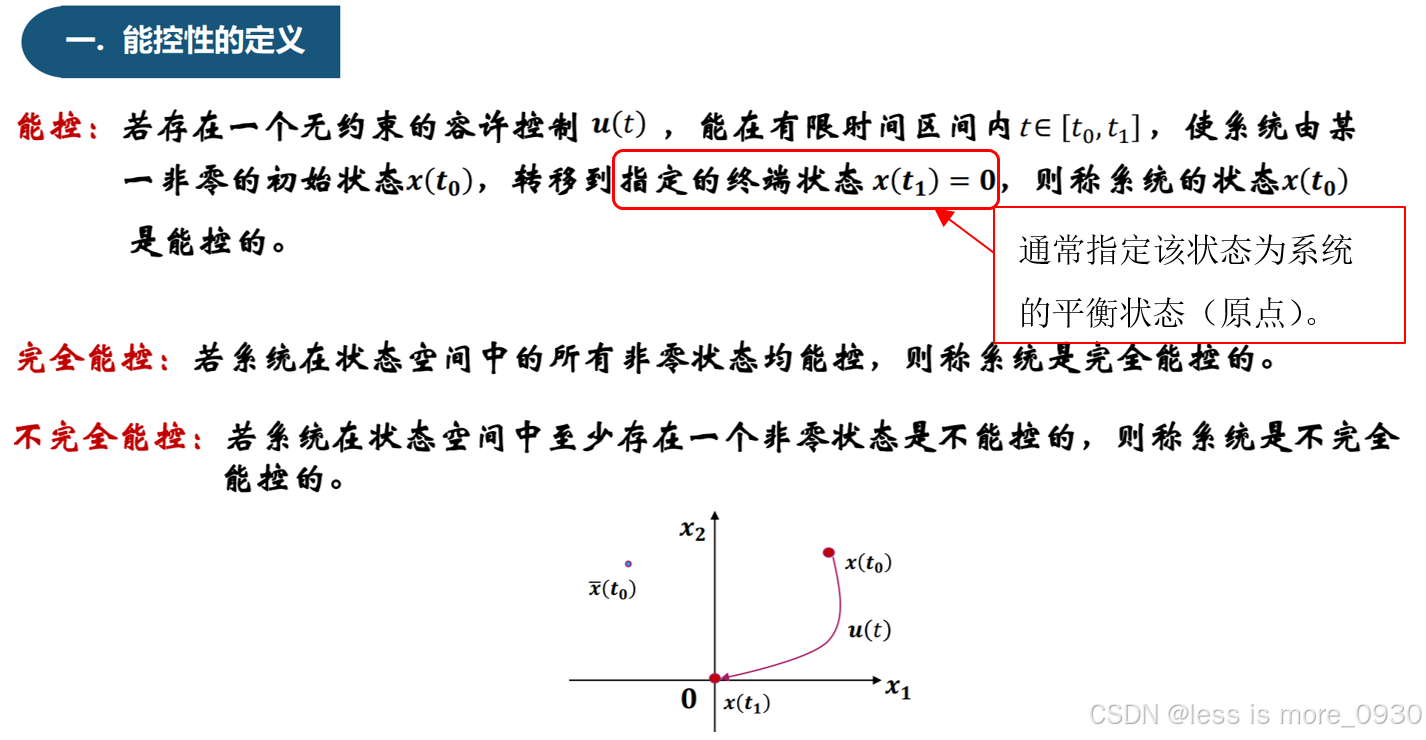
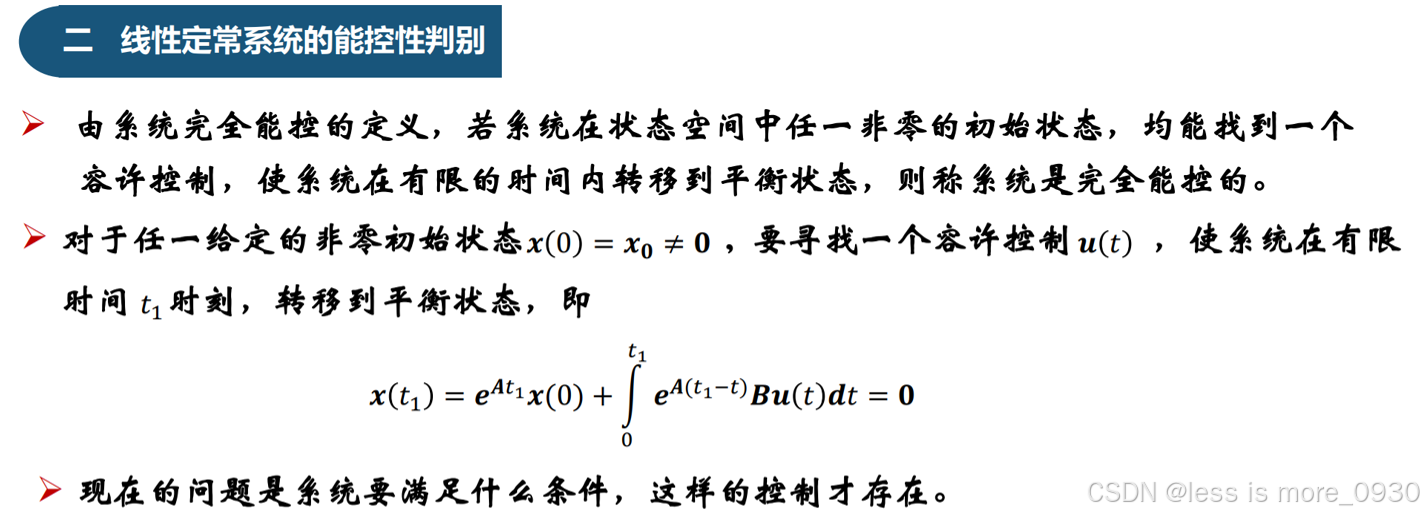
1.1.1 定义
1.1.2 能控性Gram矩阵判据
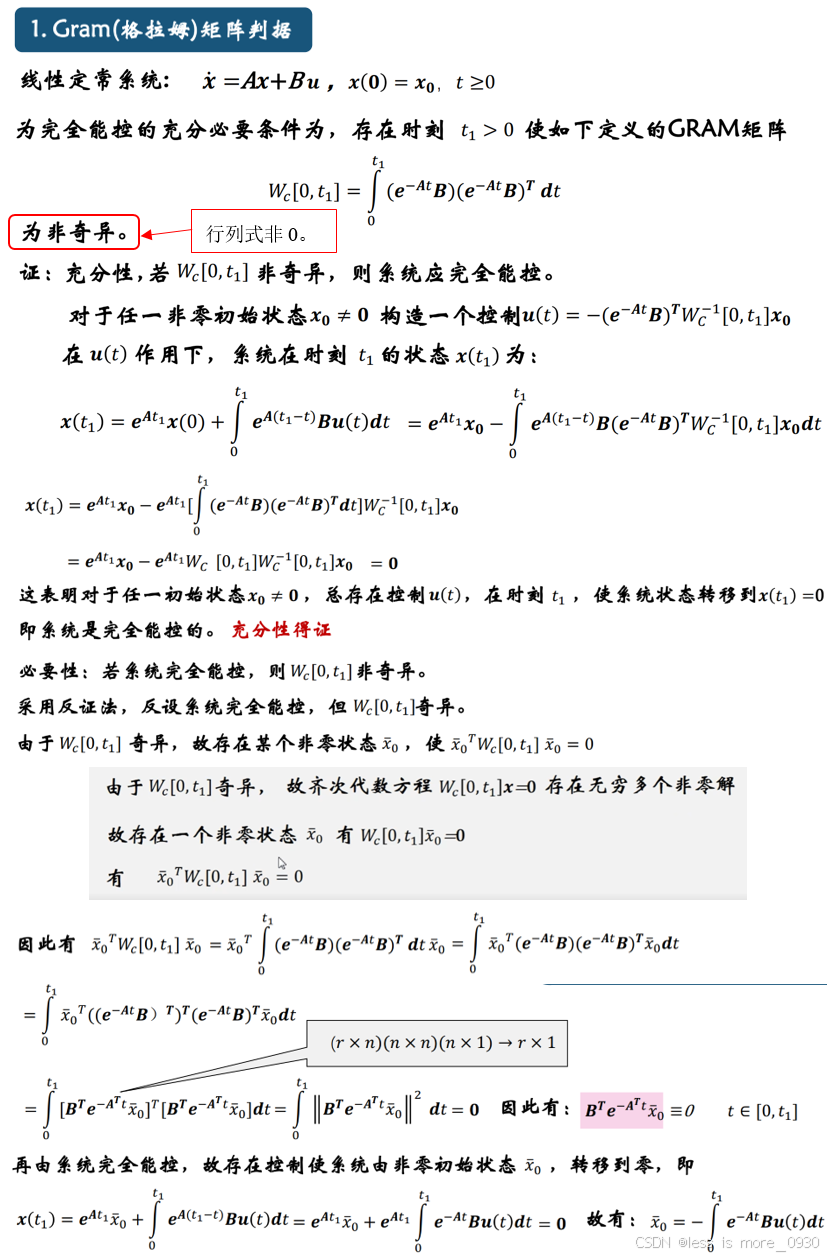

Gram矩阵判据是依据系统能控性的矩阵推导出来的,具有重要理论意义。但是利用Gram矩阵判据需要计算系统的转移矩阵,需要积分,需要计算行列式的值,计算量较大,因此还需要研究即便的计算方法用于判断系统的能控性。
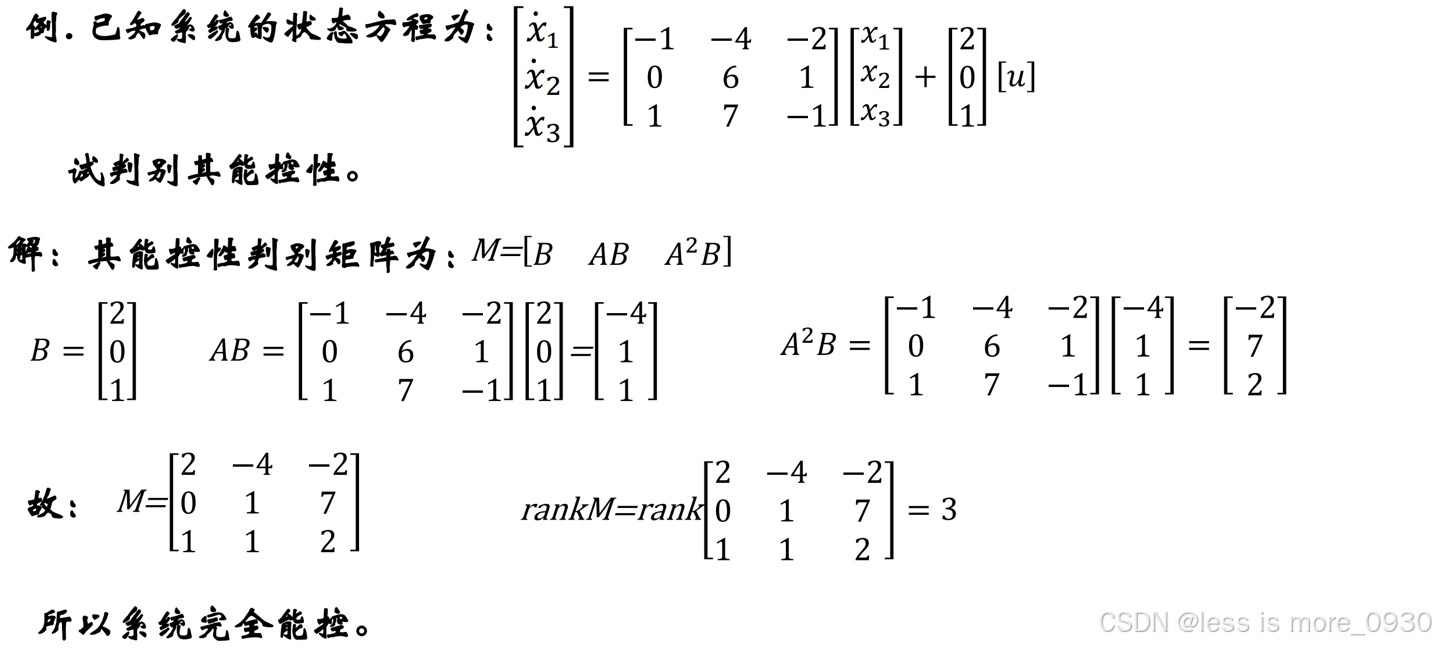
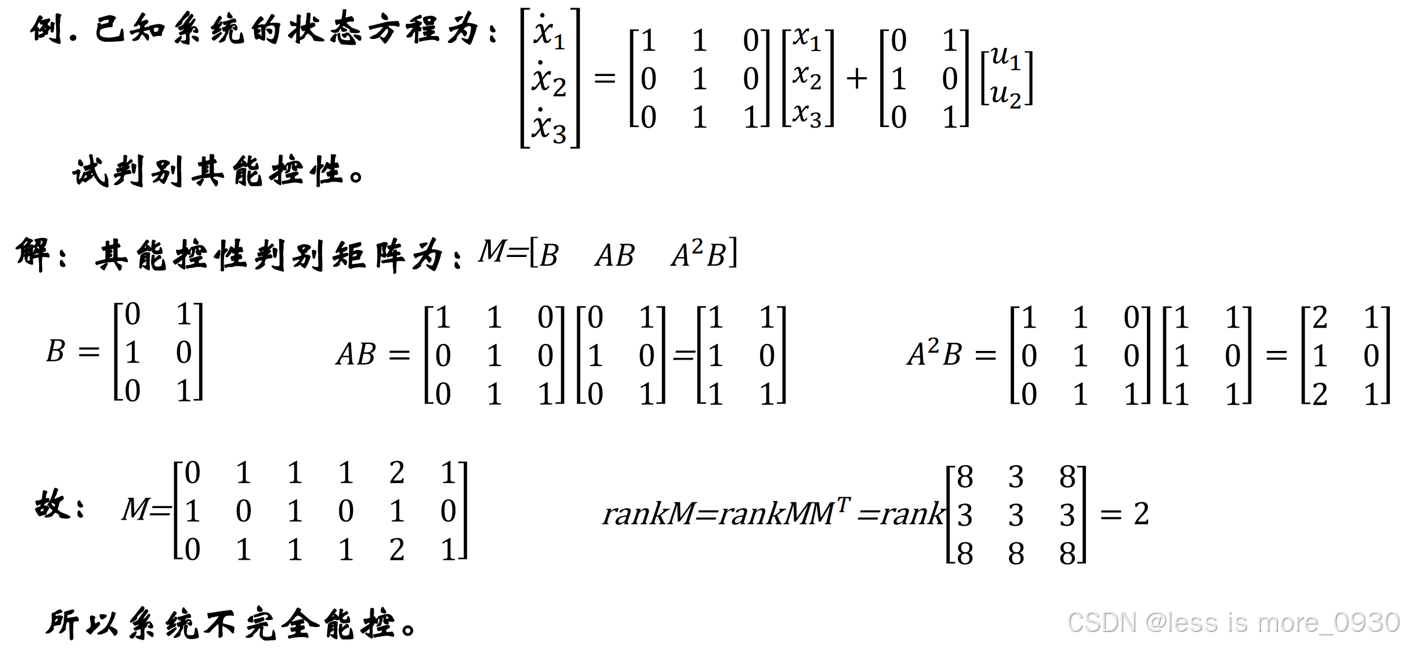
1.1.3 能控性秩判据
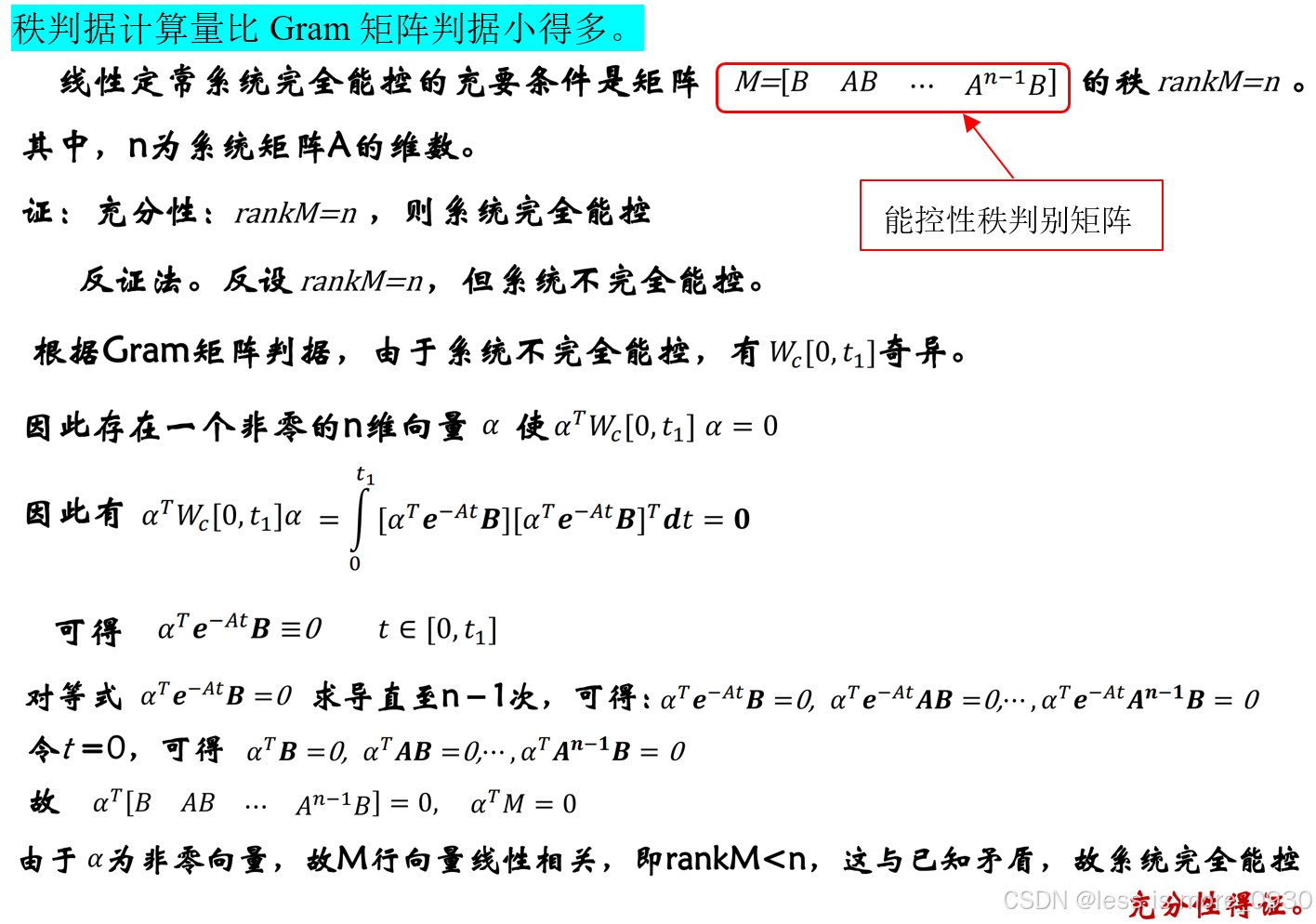
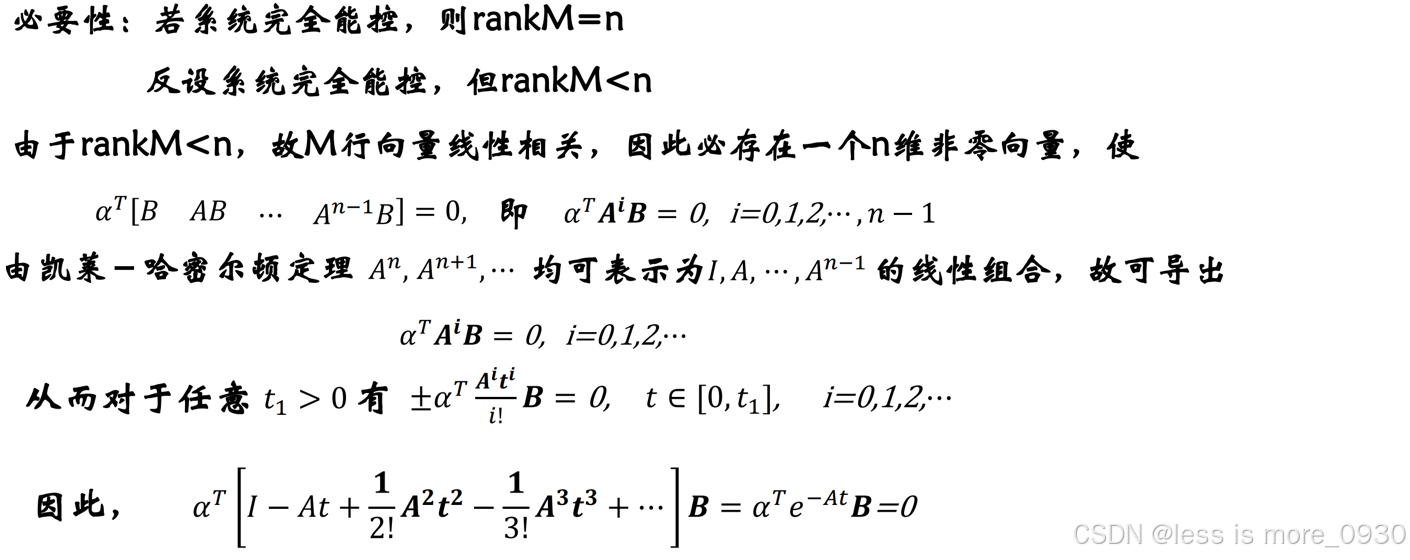
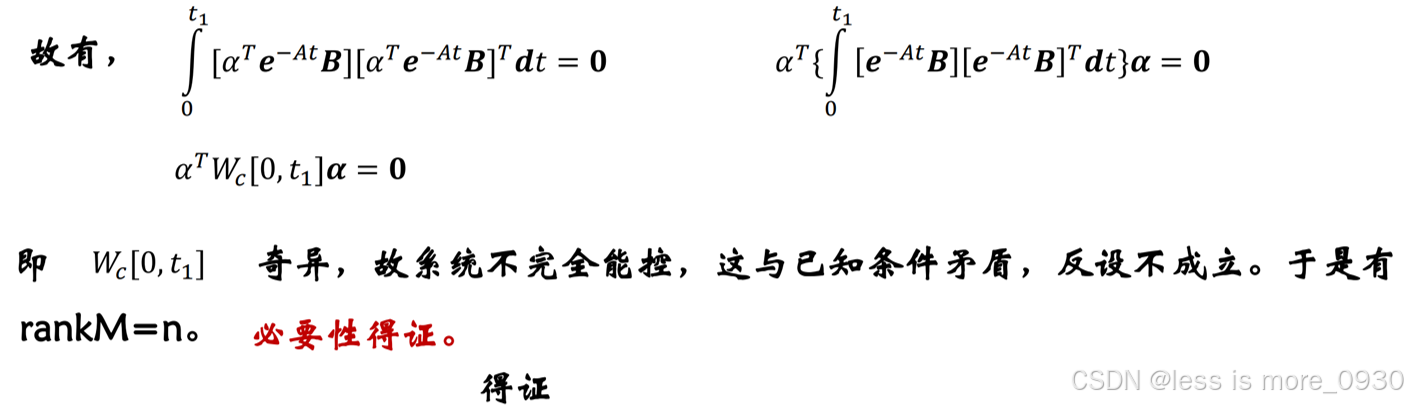
秩判据只能给出整个系统是否能控的结论,对于不完全能控的系统,哪些特征根可移动,哪些特征根不可移动,秩判据不能给出具体的信息。
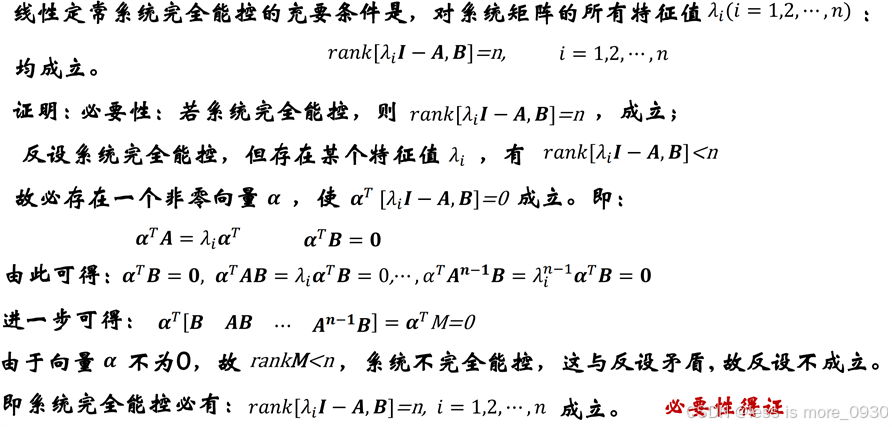
1.1.4 能控性PBH判据
![]()
PBH判据要计算每一个特征值的能控性自判别矩阵,计算量比秩矩阵判据大。
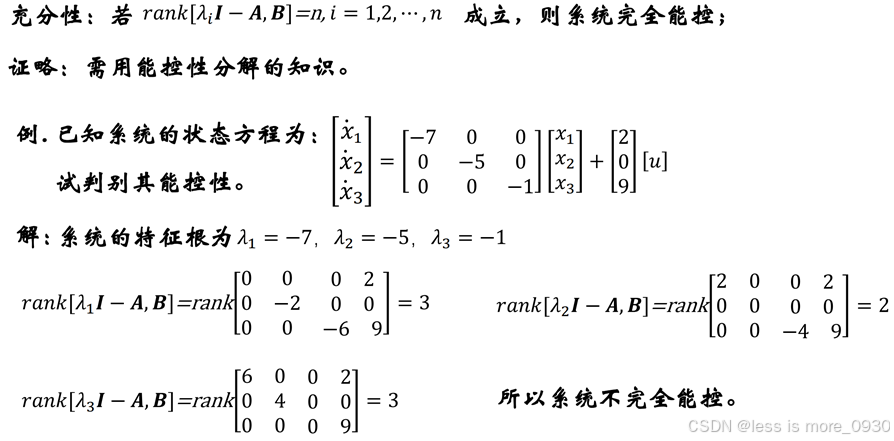
λ2这个特征根不可控,不能通过状态反馈控制来移动极点λ2。
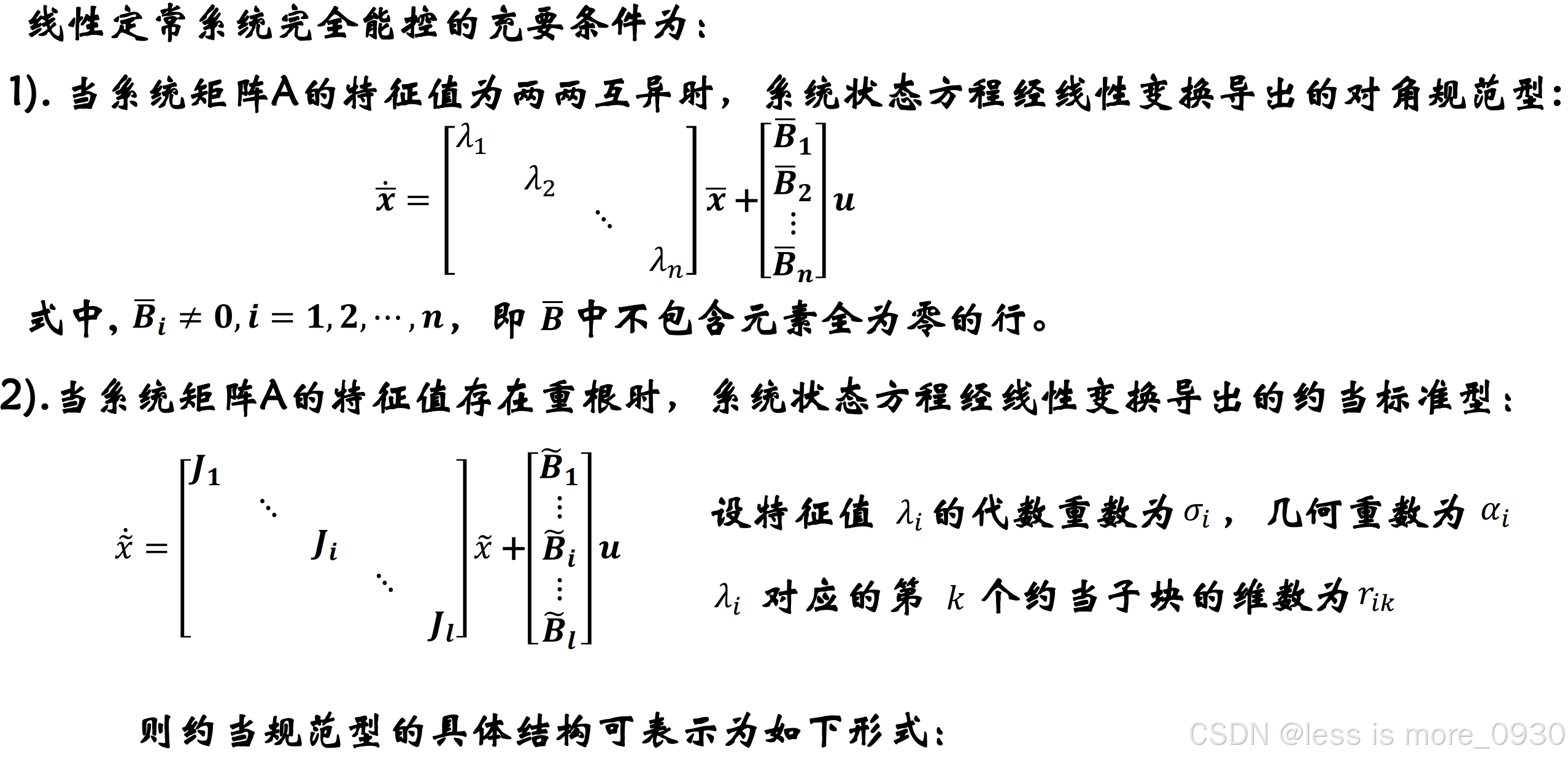
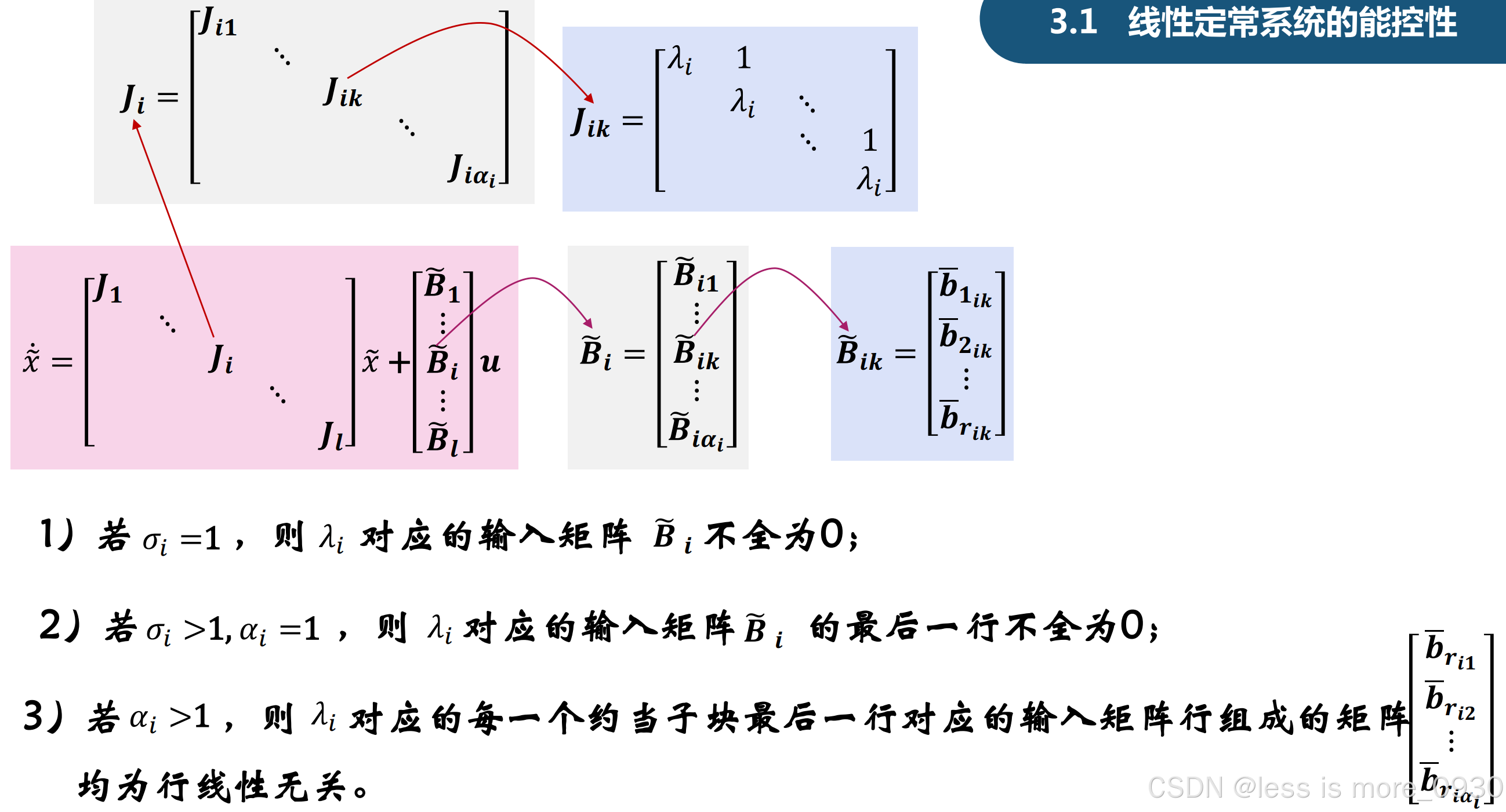
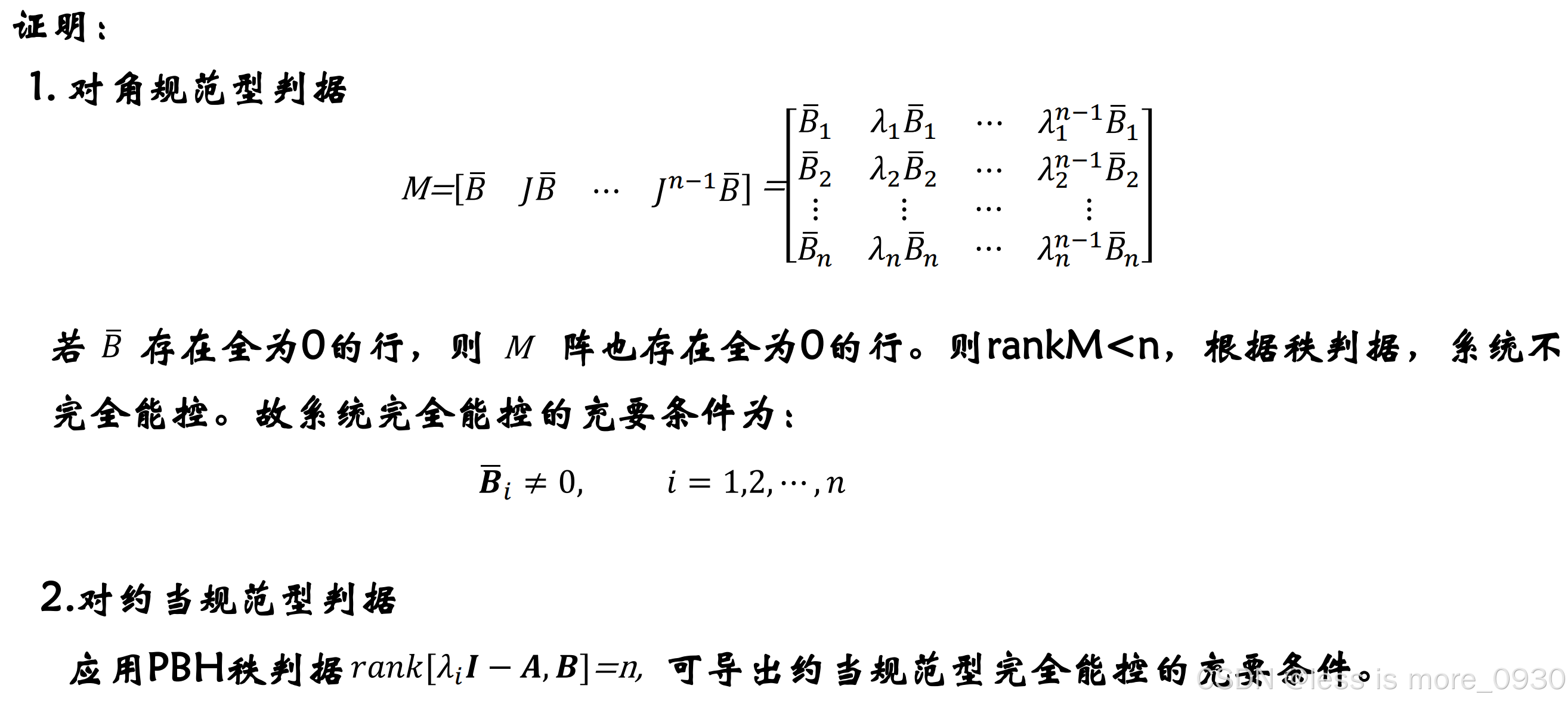
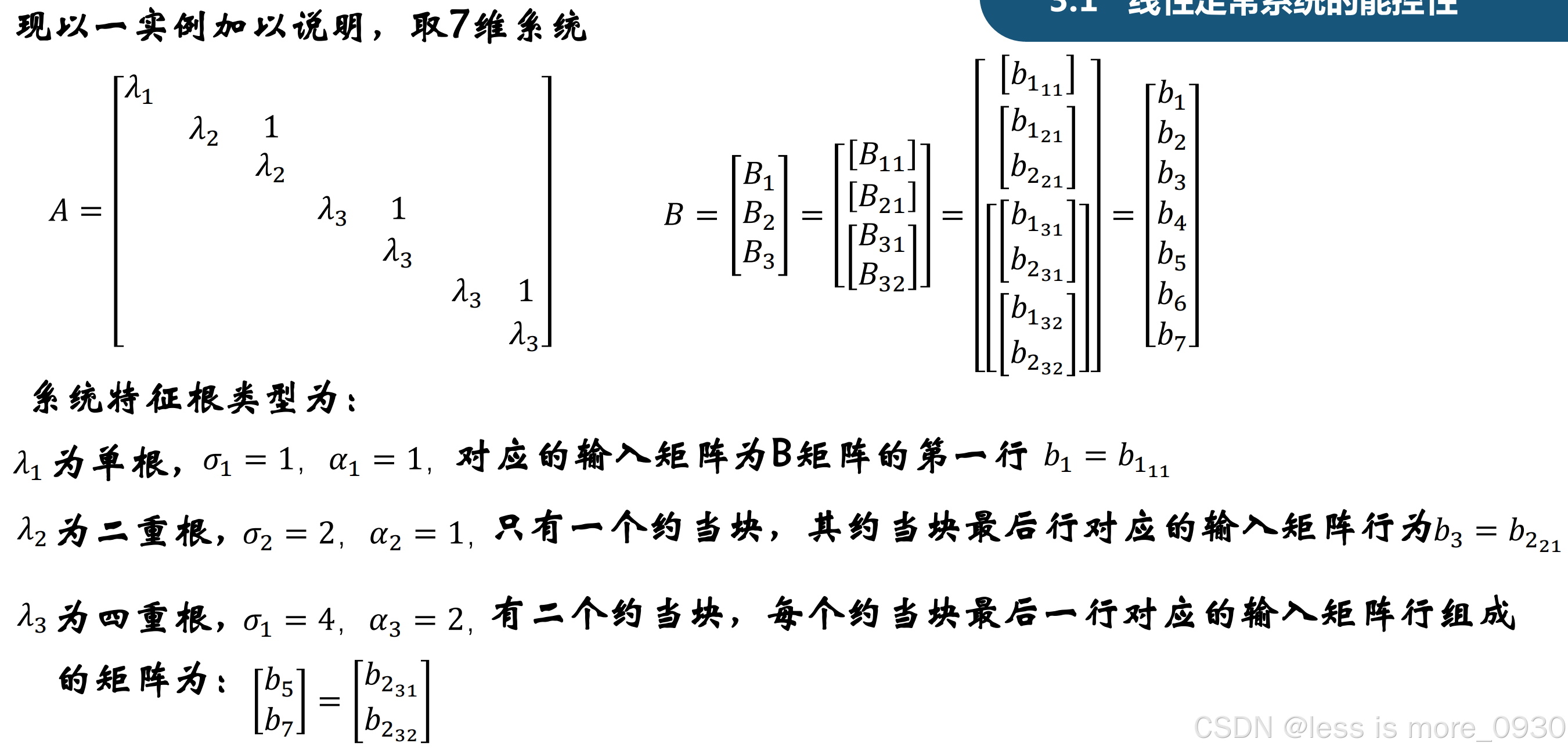
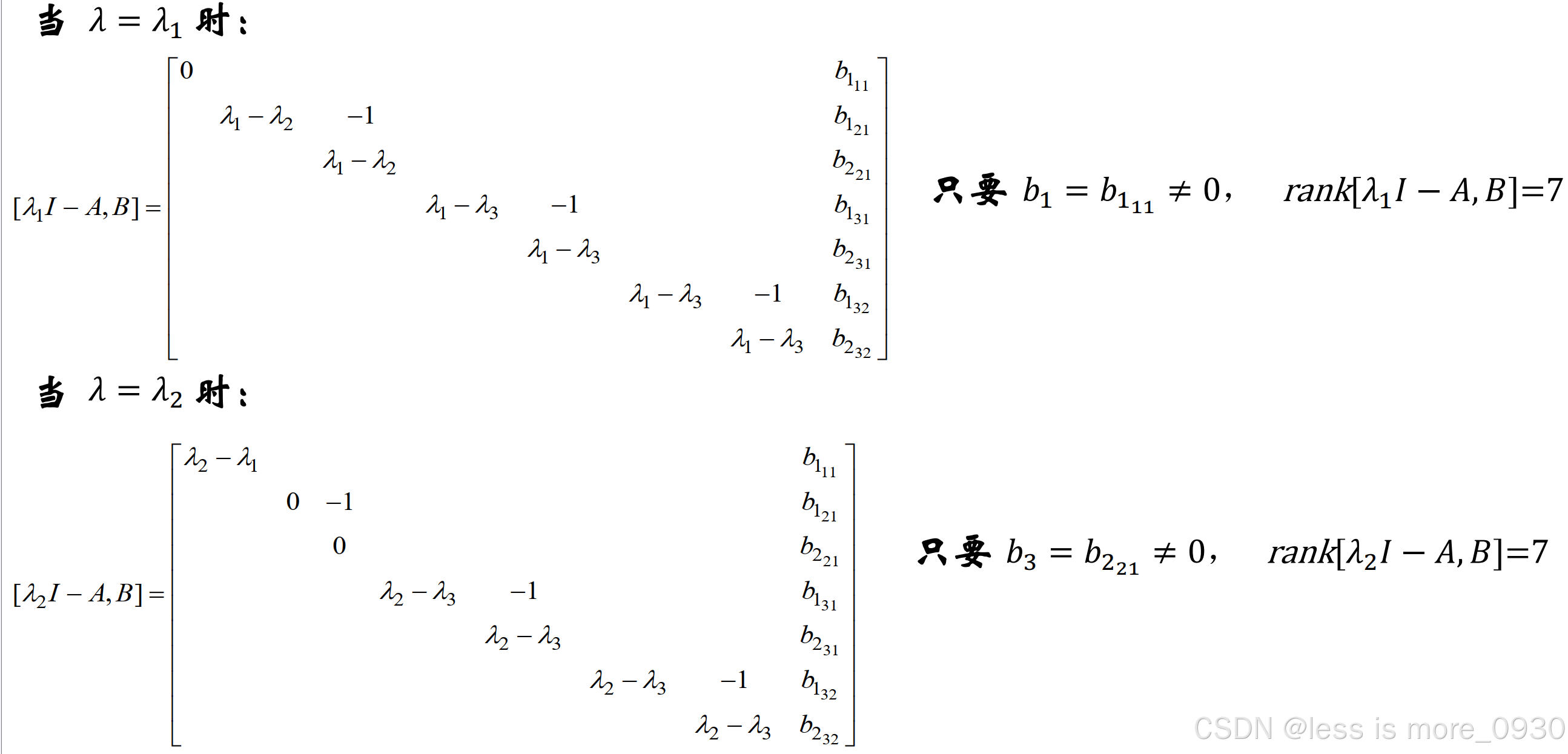
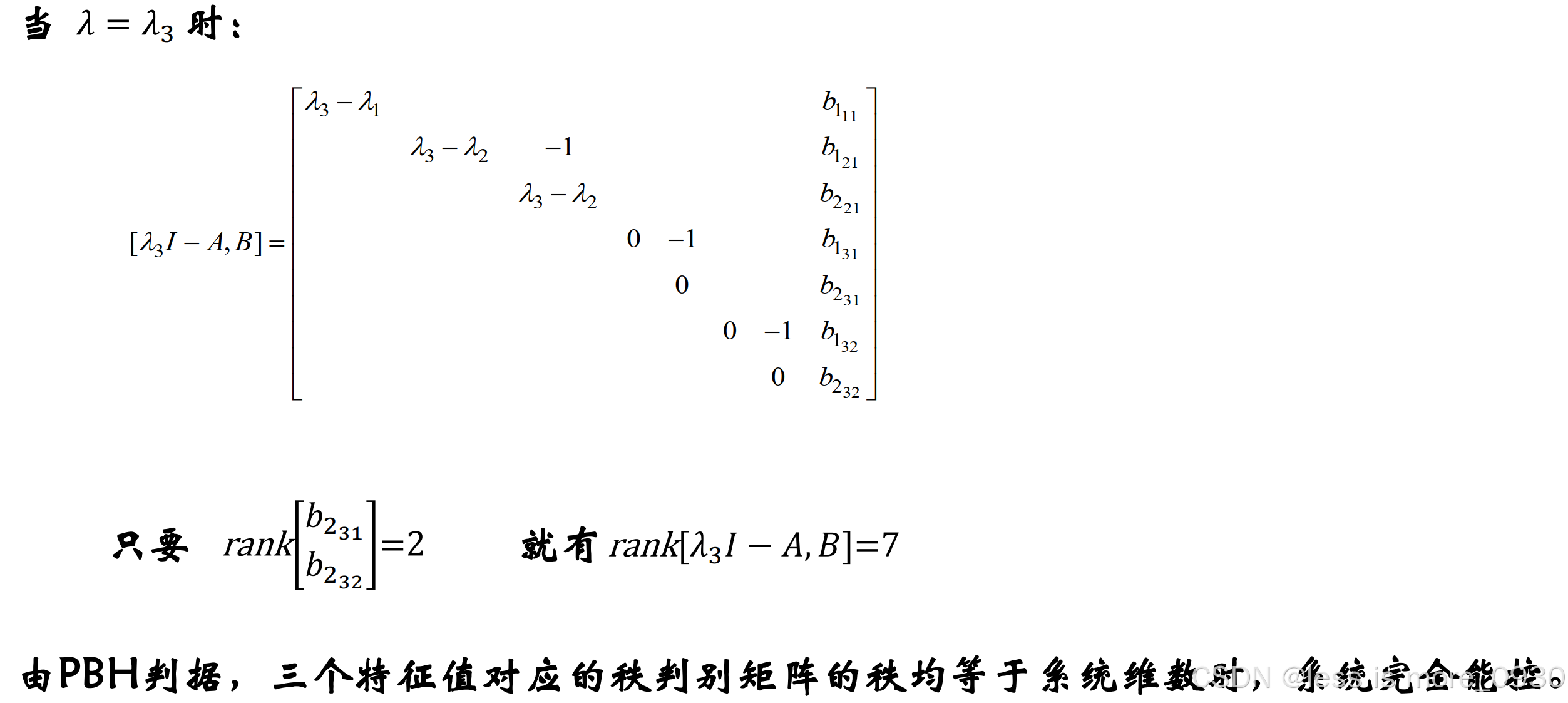
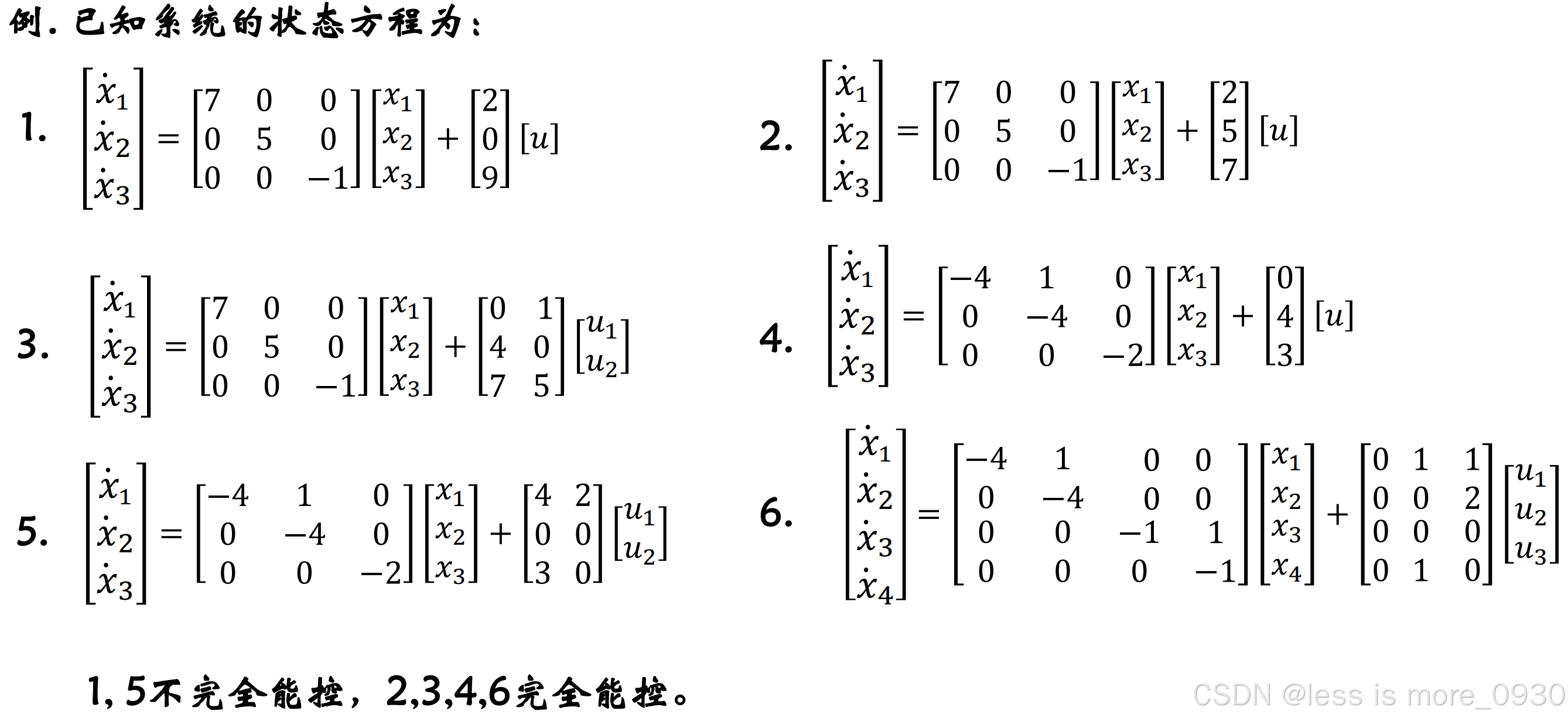
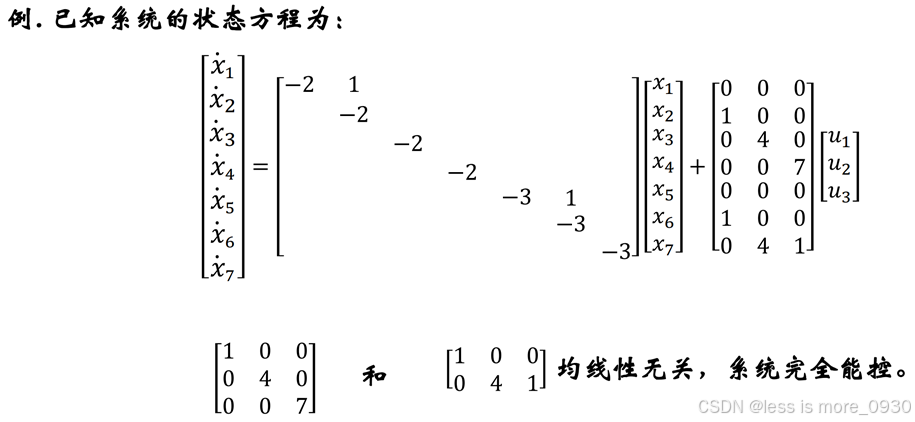
1.1.5 能控性规范型判据
![]()
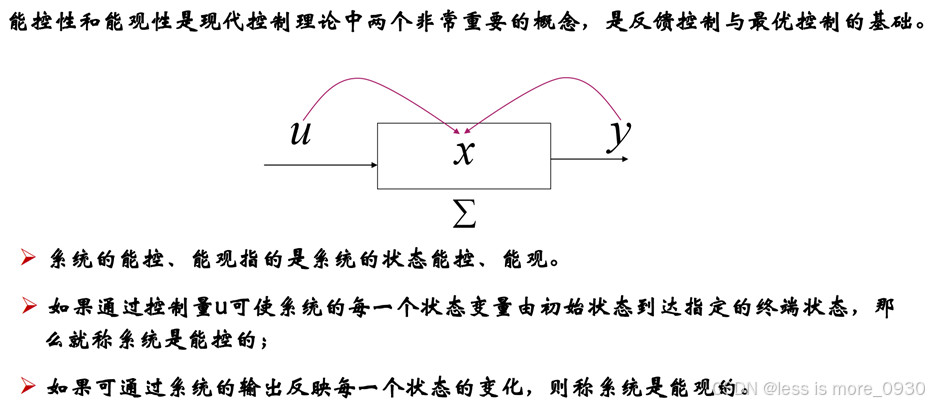
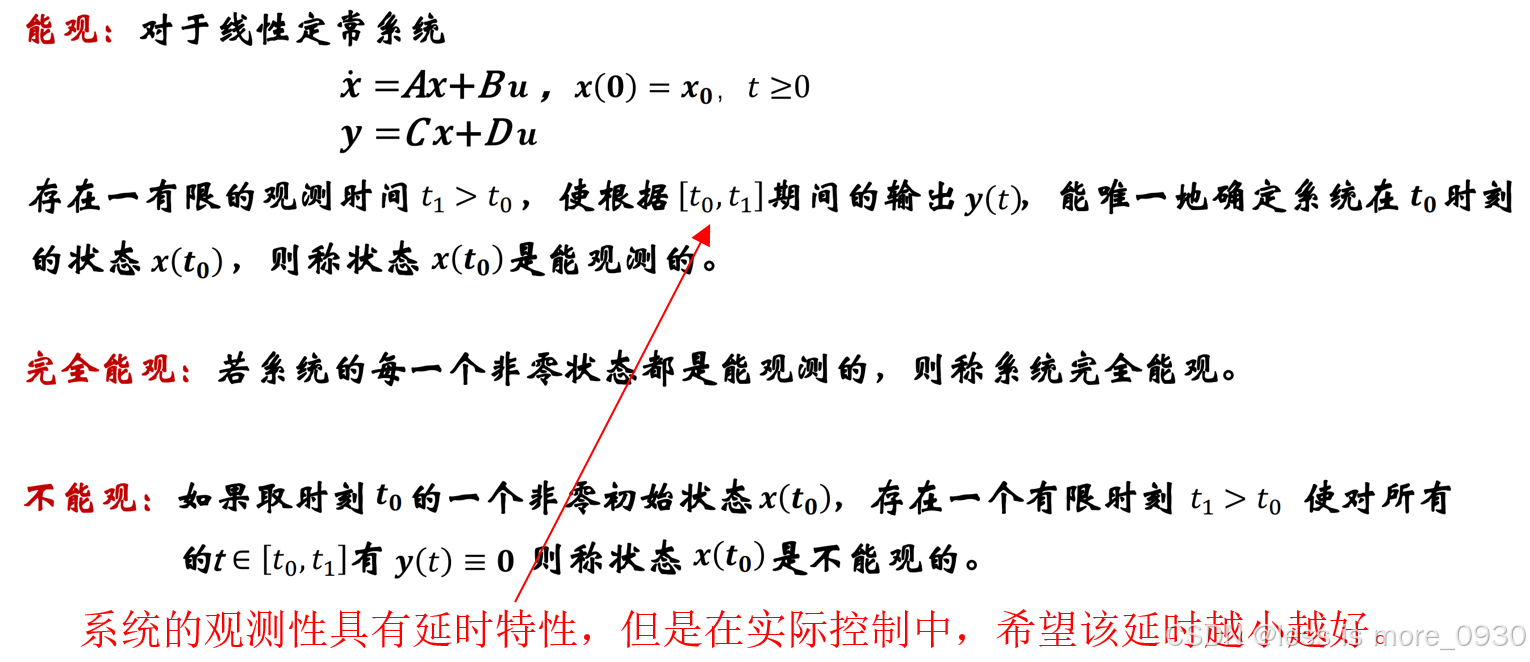
1.2 线性定常系统的能观性
1.2.1 定义
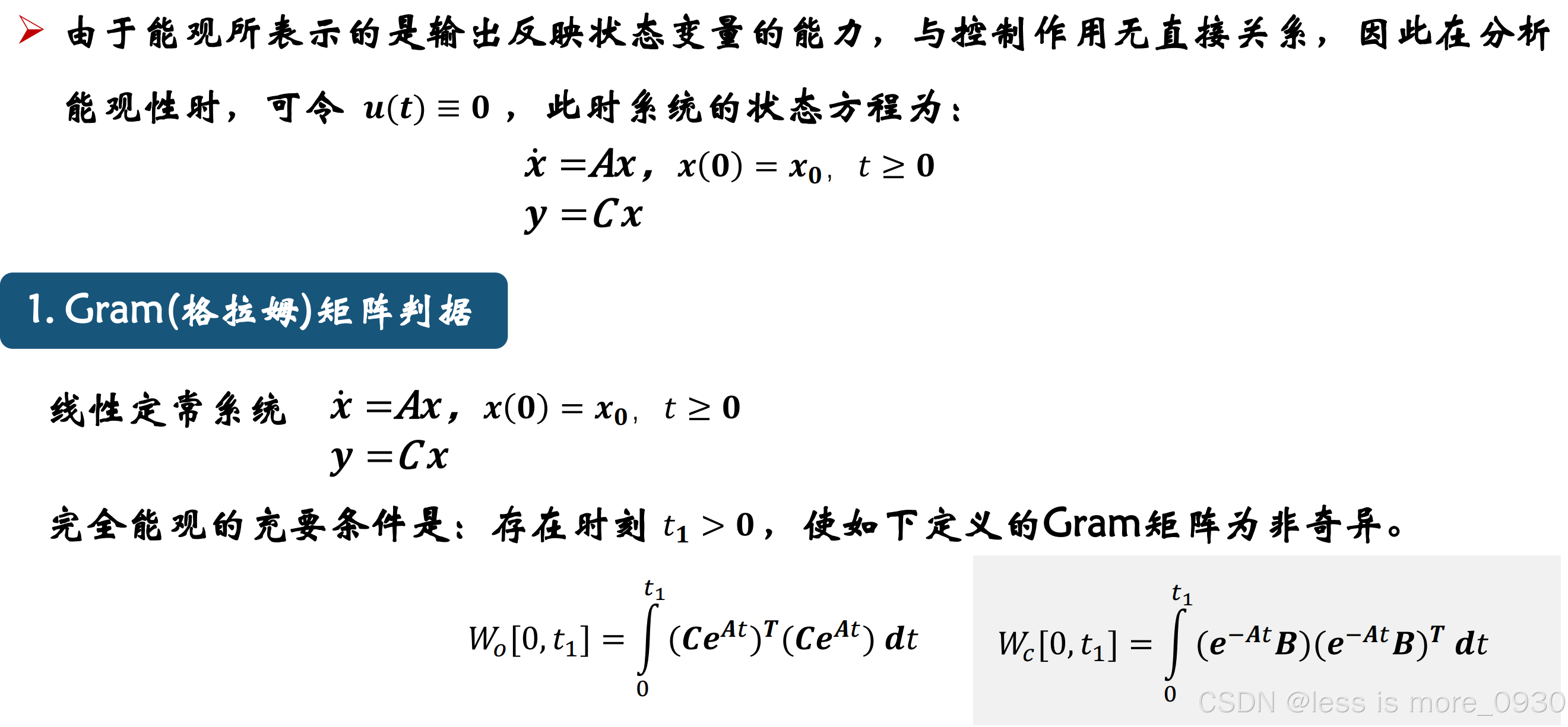
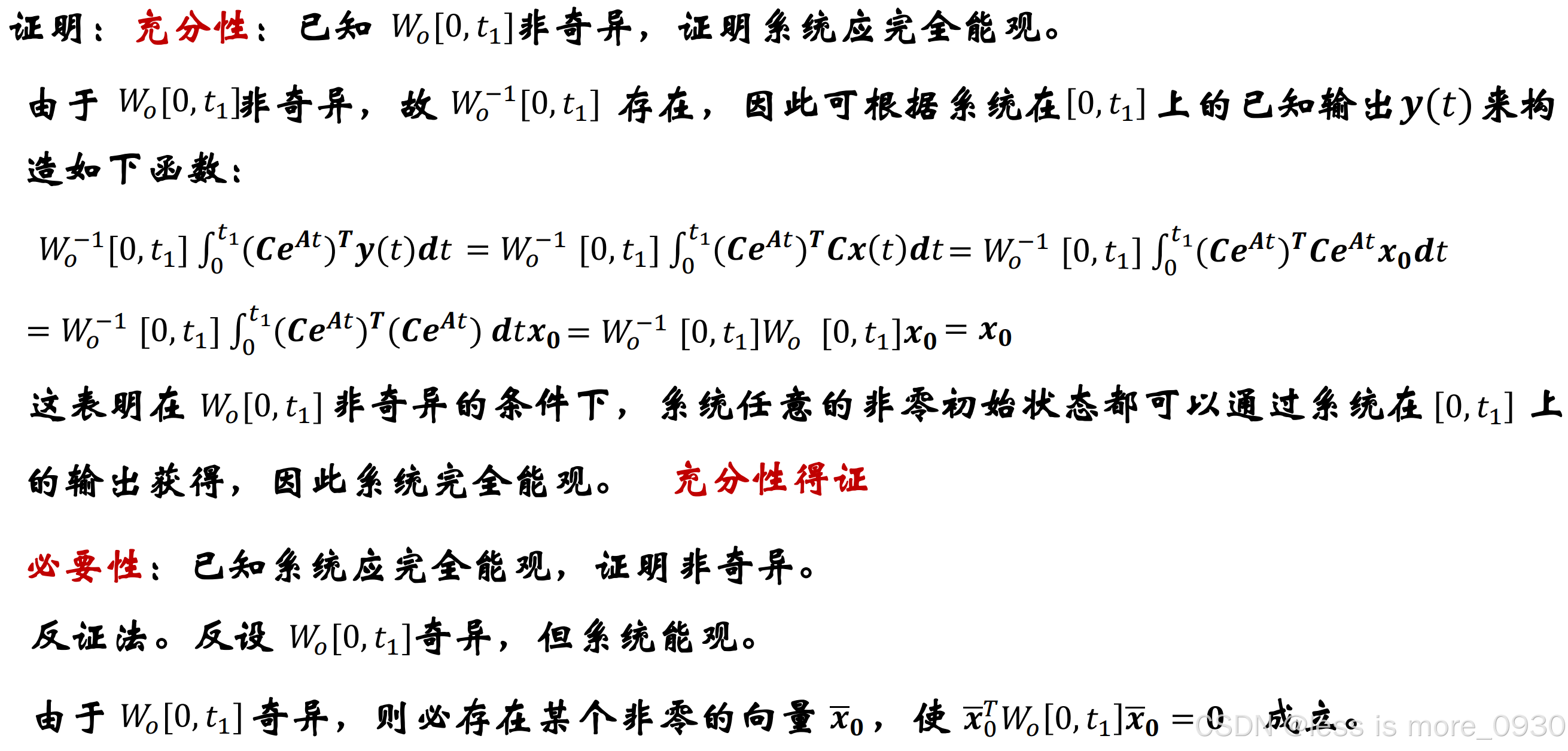
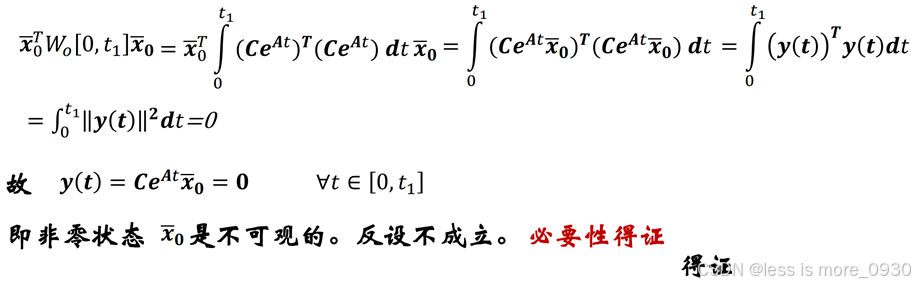
1.2.2 能观性Gram矩阵判据
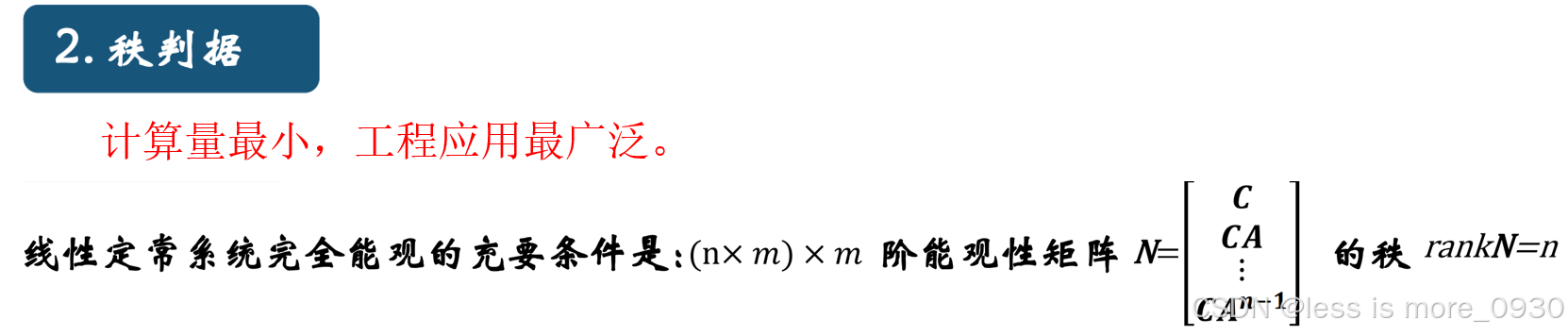
1.2.3 能观性秩判据
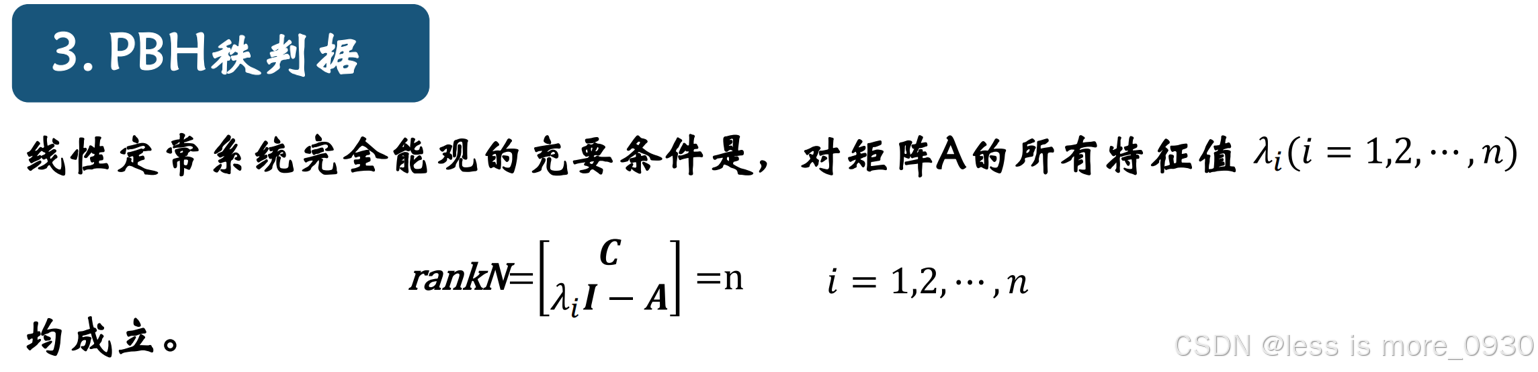
1.2.4 能观性PBH判据
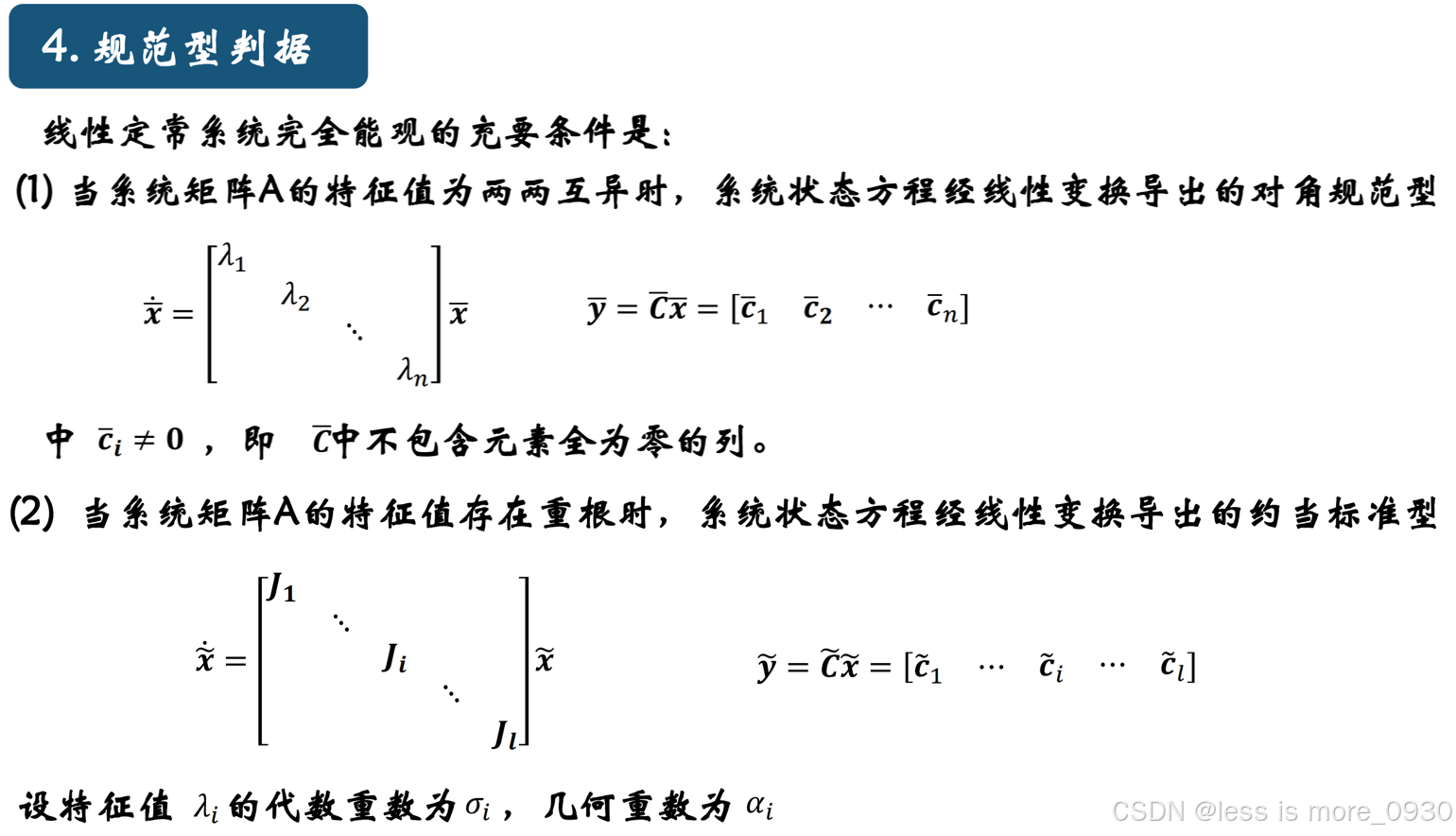
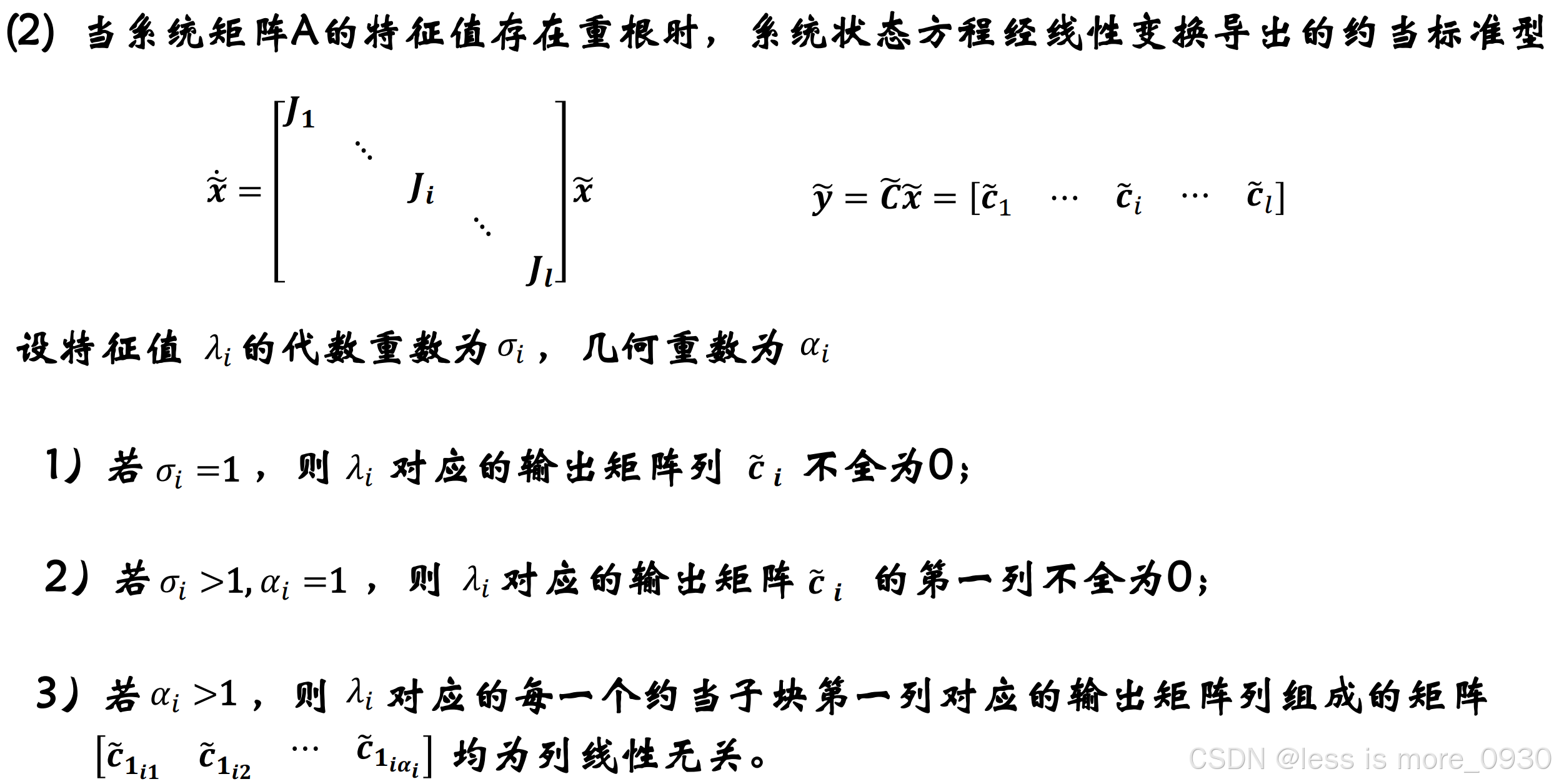
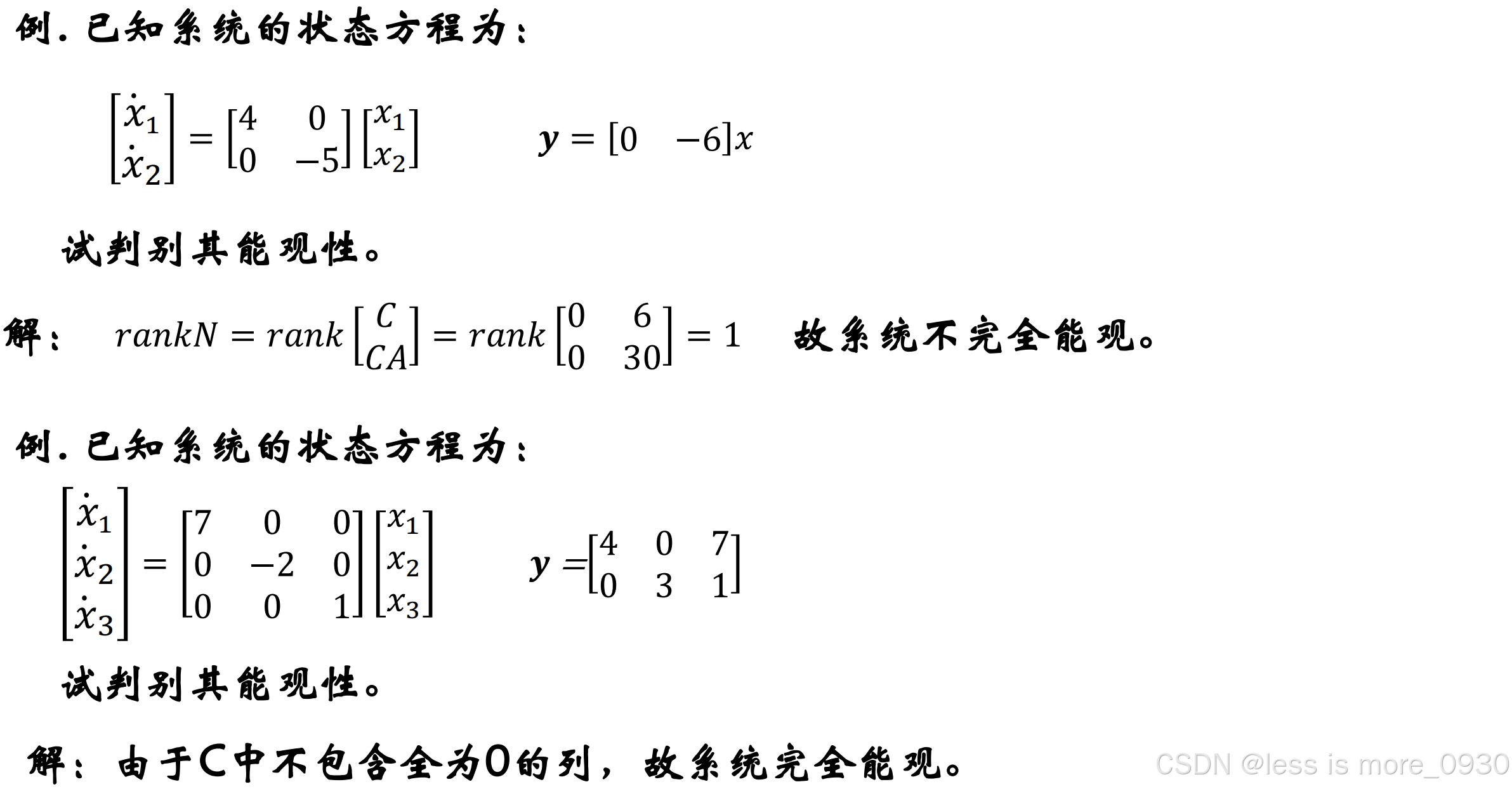
1.2.5 能观性规范型判据
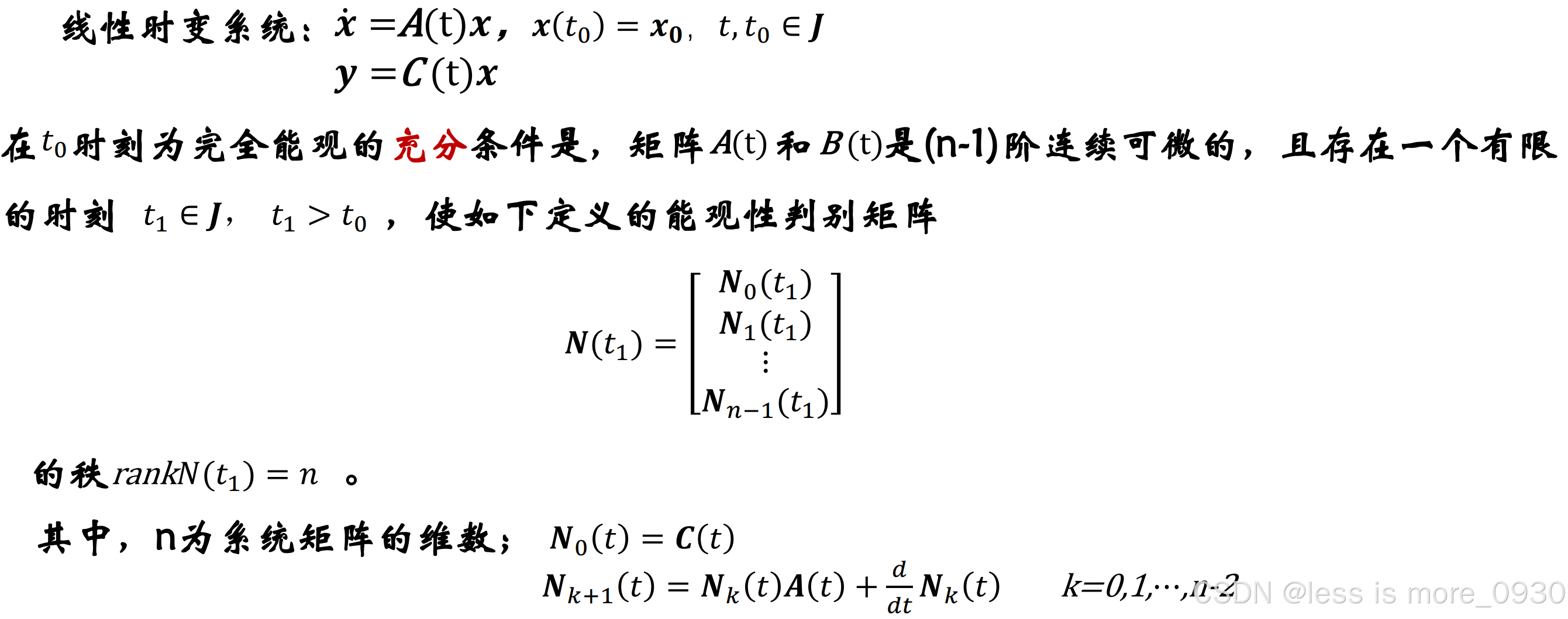
1.3 线性时变系统的能控性与能观性
1.3.1 能控性定义
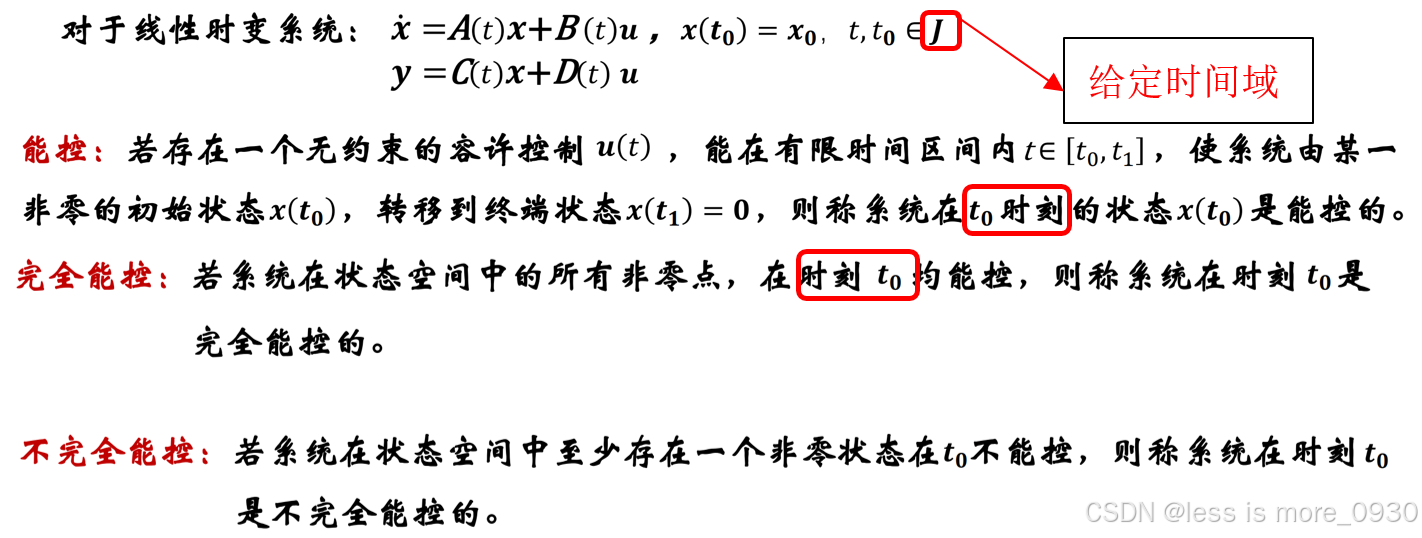
因为线性时变系统的系数矩阵随着时间在不断的变化,因此,线性时变系统的能控性和能观性是针对某一时刻进行讨论的。
1.3.2 能控性Gram矩阵判据
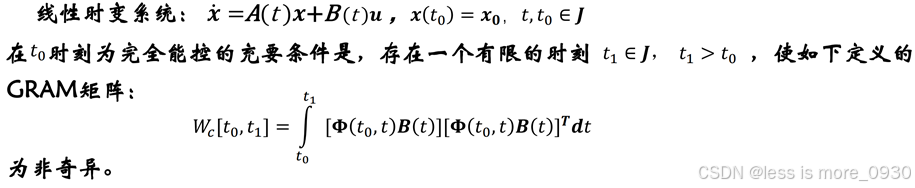
线性时变系统的状态转移矩阵无法写出封闭形式,因此,线性时变系统的Gram矩阵判据只具有理论意义。
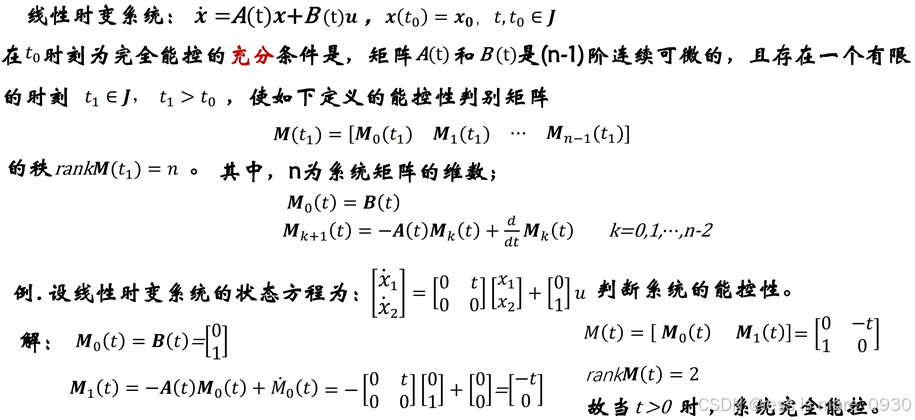
1.3.3 能控性秩判据
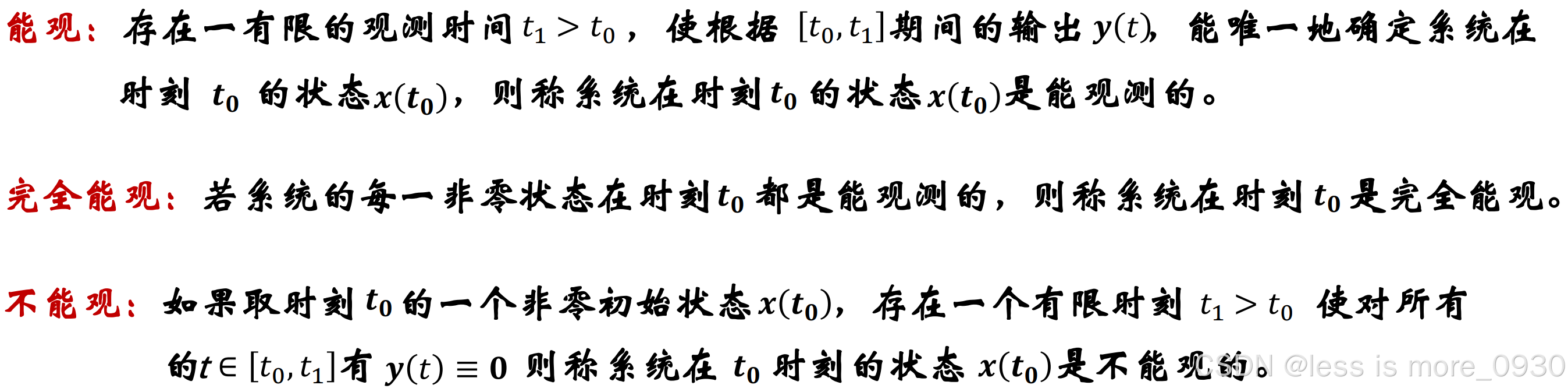
1.3.4 能观性定义

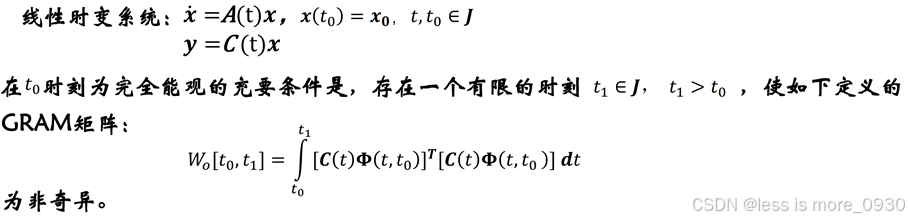
1.3.5 能观性Gram矩阵判据
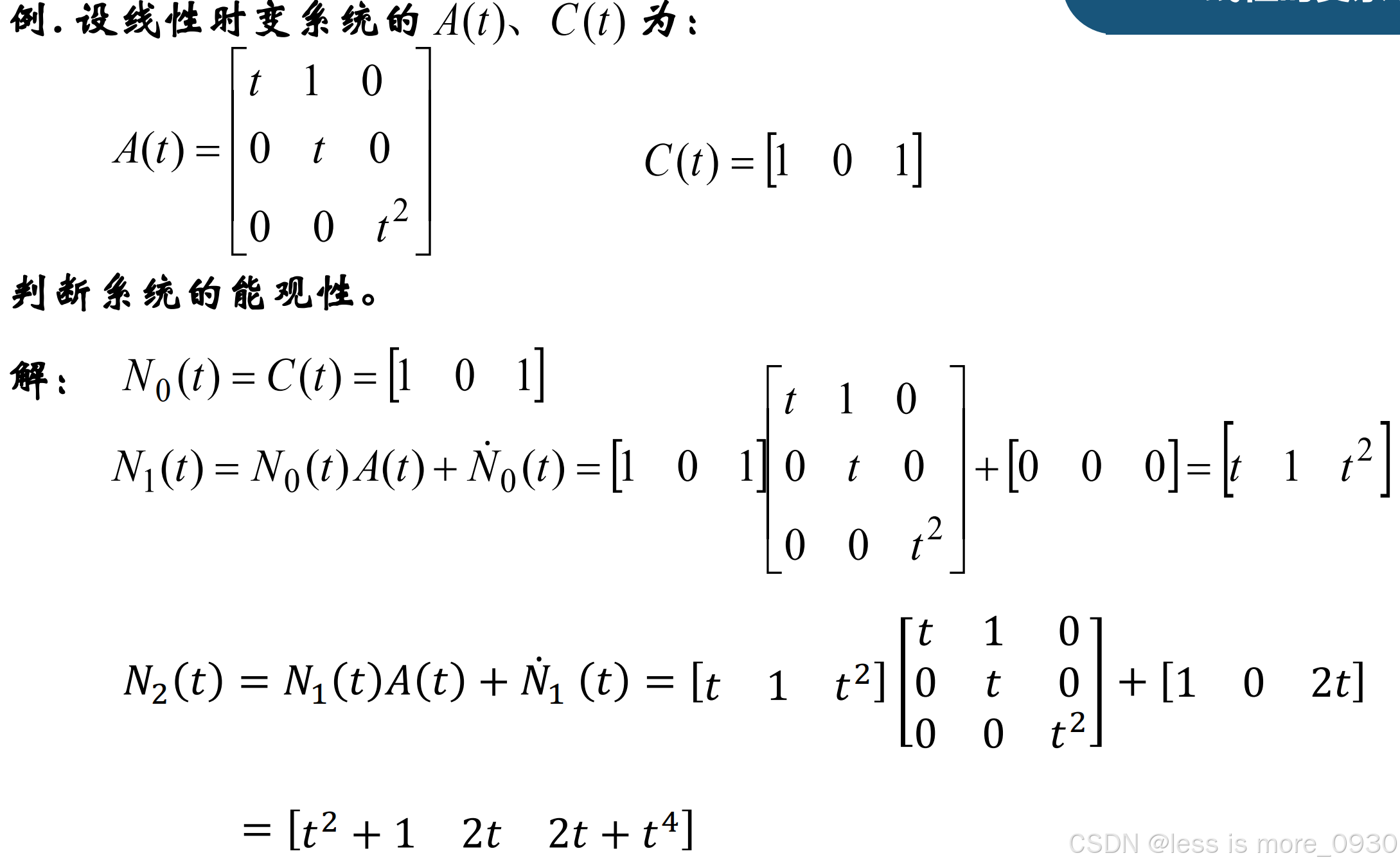
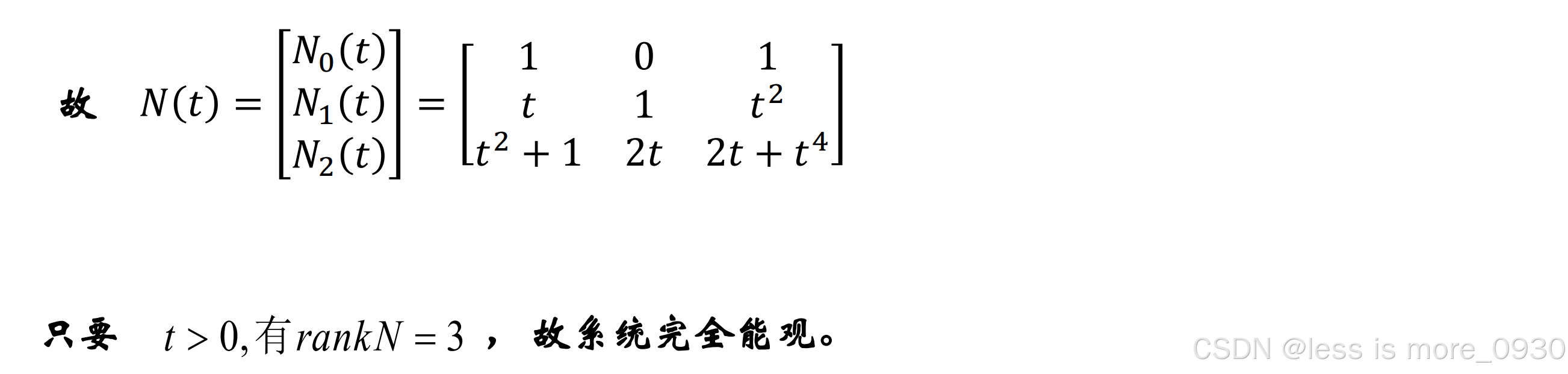
1.3.6 能观性秩判据