嵌入式科普(41)通过对比深刻理解CAN总线协议特性
一、概述
1、网上众多CAN总线教程过于复杂,不利于初学者抓住关键点
2、通过对比嵌入式常见通信协议,让初学者深入理解CAN总线特性
3、横向对比可以发现各个协议的都具有不可替代性
二、嵌入式通信协议全方位对比表
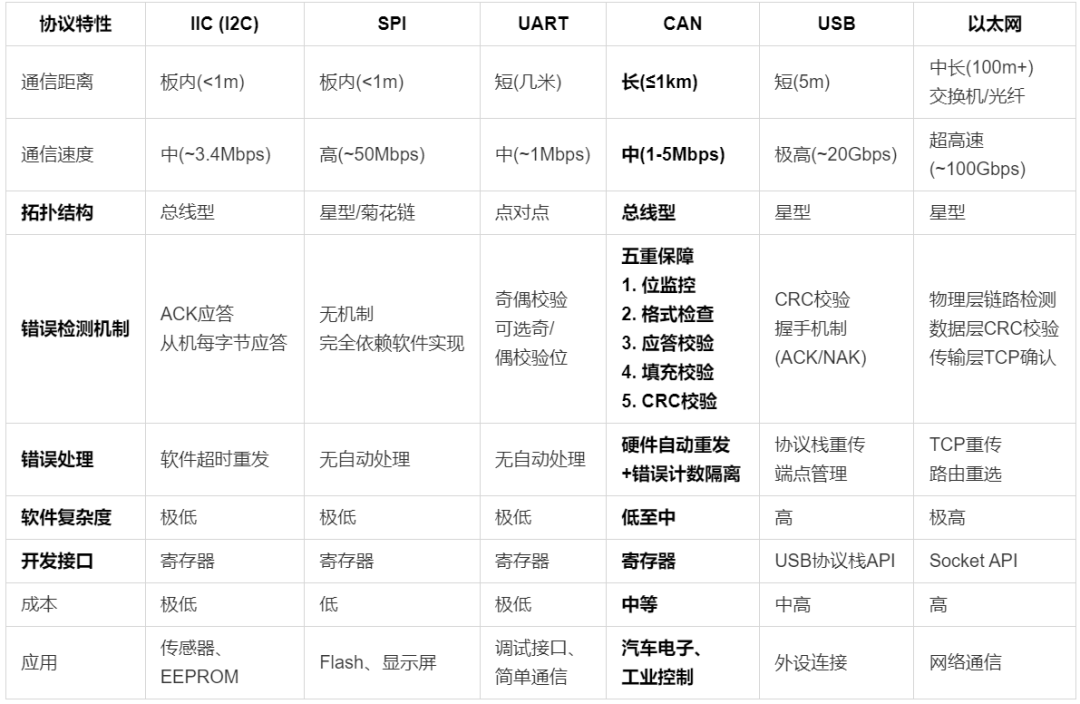
三、协议核心机制详细对比
3.1 抗干扰能力对比
协议 | 支持情况 | 具体实现方式 |
|---|---|---|
| CAN | 优秀 (硬件级) | 1. 差分信号 (CAN_H/CAN_L)
|
UART | 差 | 单端信号传输,无内置抗干扰机制 |
SPI | 差 | 单端信号,短距离板内通信 |
I2C | 差 | 单端信号,上拉电阻设计 |
RS485 | 良好 | 差分信号传输,物理层抗干扰能力良好 |
| USB | 优秀 | 差分信号 + 数据包CRC校验 |
| 以太网 | 优秀 | 差分信号 + 32位CRC校验 + 复杂的编码机制 |
3.2 自动重发机制对比
协议 | 支持情况 | 具体实现方式 |
|---|---|---|
| CAN | 硬件自动重发 | 控制器硬件自动检测错误并重发 |
UART | 软件实现 | 需在应用层实现超时重传逻辑 |
SPI | 不支持 | 无任何自动重发机制 |
I2C | 不支持 | 无任何自动重发机制 |
RS485 | 协议层实现 | 依赖上层协议(如Modbus)实现软件重传 |
USB | 协议层重发 | 通过NAK握手协议请求主机重发 |
以太网 | 传输层重发 | TCP协议通过序列号和ACK实现可靠传输 |
3.3 故障节点隔离对比
协议 | 支持情况 | 具体实现方式 |
|---|---|---|
| CAN | 硬件自动隔离 | TEC > 255时自动进入Bus-Off状态 |
UART | 不支持 | 故障节点可能阻塞整个通信 |
SPI | 有限支持 | 主机可通过禁用片选(CS)隔离从设备 |
I2C | 不支持 | 故障节点可能拉死整个总线 |
RS485 | 不支持 | 需要额外硬件实现故障隔离 |
USB | 主机控制隔离 | 主机检测到设备异常后可禁用该设备 |
以太网 | 网络层隔离 | 交换机通过MAC地址学习实现逻辑隔离 |
3.4 断线检测对比
协议 | 支持情况 | 具体实现方式 |
|---|---|---|
CAN | 间接检测 | 通过TEC增长和Bus-Off状态推断断线 |
UART | 软件超时检测 | 应用层心跳包和超时机制 |
SPI | 无法检测 | 无任何断线检测机制 |
I2C | 无法检测 | 无任何断线检测机制 |
RS485 | 软件检测 | Modbus等协议的心跳机制 |
| USB | 硬件链路检测 | PHY芯片直接检测物理连接状态 |
| 以太网 | 硬件链路检测 | PHY芯片检测链路脉冲,自动报告Link状态 |
3.5 诊断系统对比
协议 | 支持情况 | 具体实现方式 |
|---|---|---|
| CAN | 标准化诊断 | UDS协议,完整的诊断服务 |
UART | 自定义协议 | 需要自行定义诊断命令格式 |
SPI | 无标准 | 无标准化诊断协议 |
I2C | 无标准 | 无标准化诊断协议 |
RS485 | 工业协议 | Modbus等协议提供基本诊断功能 |
USB | 设备枚举 | 通过描述符识别设备状态和能力 |
以太网 | 网络诊断 | ICMP、SNMP等网络层诊断工具 |
综合评级总结
协议 | 抗干扰 | 自动重发 | 故障隔离 | 断线检测 | 诊断系统 | 适用场景 |
|---|---|---|---|---|---|---|
| CAN | ✓✓✓ | ✓✓✓ | ✓✓✓ | ✓✓ | ✓✓✓ | 汽车、工业控制 |
UART | ✗ | ✓ | ✗ | ✓ | ✓ | 调试、简单通信 |
SPI | ✗ | ✗ | ✓ | ✗ | ✗ | 板内高速通信 |
I2C | ✗ | ✗ | ✗ | ✗ | ✗ | 板内低速设备 |
RS485 | ✓✓ | ✓ | ✗ | ✓ | ✓✓ | 工业自动化 |
USB | ✓✓✓ | ✓✓ | ✓✓ | ✓✓✓ | ✓✓✓ | 外设连接 |
以太网 | ✓✓✓ | ✓✓ | ✓✓ | ✓✓✓ | ✓✓✓ | 网络通信 |
图例说明:
✓✓✓:优秀/硬件级支持
✓✓:良好/协议级支持
✓:基本/软件实现支持
✗:不支持/效果差
关键结论:
- CAN总线
在可靠性相关机制上全面领先,特别适合高可靠性要求的控制场景
- USB
和以太网在数据传输和连接性方面表现优异,但在实时控制方面不如CAN
- RS485
物理层优秀,但缺少智能的错误管理功能
- UART/SPI/I2C
简单易用,但在可靠性和错误处理方面较弱
协议选择需要根据具体应用场景在可靠性、成本和复杂度之间权衡
四、CAN总线协议几个特征
4.1 回环模式
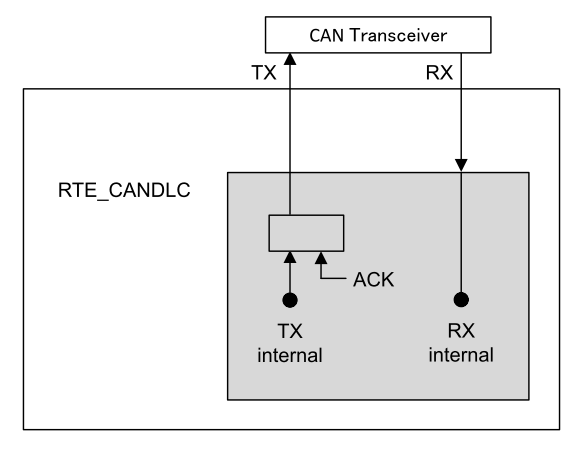
工作原理
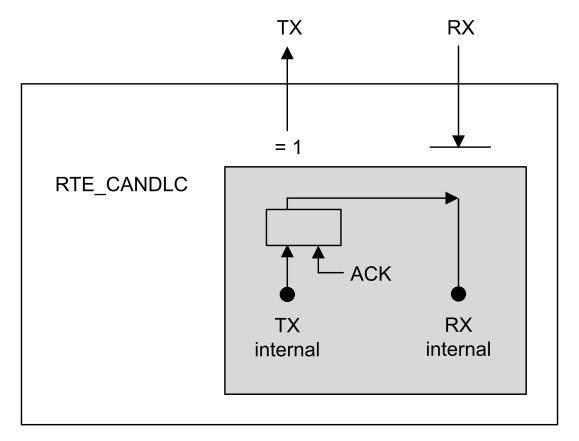
在该模式下,CAN控制器内部将TX引脚和RX引脚短接。当你发送一帧报文时,这帧报文不会(或即使发出也同时)被自己的接收器收到。它自己给自己发送ACK应答位,因此总能发送“成功”。为何需要回环模式?
硬件验证:在生产或开发初期,验证MCU的CAN控制器硬件及驱动程序是否正常工作。软件调试:在只有单个节点或没有CAN分析仪的情况下,开发者可以调试应用程序的通信逻辑,例如验证数据打包/解包程序是否正确。
孤立测试:测试工作完全在芯片内部进行,与外部环境隔离,非常安全可靠。
注意事项
与总线关系:在回环模式下,节点通常无法接收到总线上其他节点发送的真实报文。常见模式:许多控制器还提供 “回环静默模式(Silent Loopback Mode)” ,它结合了回环和静默模式的特点,主要用于监听总线 activity 而不影响总线,同时内部可以进行自发自收测试。
4.2 接收滤波器
工作原理
CAN总线是广播式的,所有节点都能“听到”所有报文。如果每帧报文都让CPU处理,其负载将不可承受。接收滤波器就是为解决此问题而设计的硬件“门卫”。它包含两个核心概念:
标识符 (ID):你想要接收的报文ID。 掩码 (Mask):决定ID中哪些位必须严格匹配,哪些位可以忽略(不关心)。
掩码规则:
掩码位 = 1:对应的ID位必须严格匹配。 掩码位 = 0:对应的ID位不关心(可以是1也可以是0)。
滤波器配置示例
假设你只想接收ID为 0x123 的报文:设置 滤波器ID = 0x123
设置 掩码 = 0x7FF (所有11位标准ID位都需匹配)
结果:只有ID恰好为 0x123 的报文才能通过。
假设你想接收ID在 0x120 到 0x12F 范围内的所有报文:
分析:这个范围的特征是前8位(高8位)相同 (0x12),最后4位变化。
设置 滤波器ID = 0x120
设置 掩码 = 0x7F0 (高8位必须匹配,低4位不关心)
结果:所有ID符合 0x12X 的报文都能通过,实现了对一组ID的过滤。
为何需要接收滤波器?
极大降低CPU中断负载:这是最主要的目的。总线可能充斥大量无关报文,滤波器确保CPU只处理它关心的数据。实现协议分离:例如,在一个复杂的系统中,动力系统报文、车身控制报文、诊断报文都有不同的ID段。可以通过设置多个滤波器,将它们分别路由到不同的软件模块进行处理。
提高系统实时性:CPU免于处理大量无用中断,可以更及时地响应关键任务。
4.3 邮箱Mailbox和FIFO
Mailbox和FIFO是CAN控制器的资源,不同的芯片是有不同的,让你可以将不同过滤器灵活地映射到不同的FIFO上,从而在成本和性能之间取得平衡。
4.4 CAN和CANFD兼容
CAN FD(Flexible Data-rate)作为CAN的升级版,设计上是向下兼容经典CAN的
若进行小规模升级或过渡,可优先考虑使用带CAN FD屏蔽功能的收发器。
若需在经典CAN和CAN FD网络段间建立可靠通信,CAN网桥/网关更合适。
若为全新项目或追求最佳性能和未来性,且预算允许,全部采用CAN FD节点是长远之选
4.5 其他
五、总结
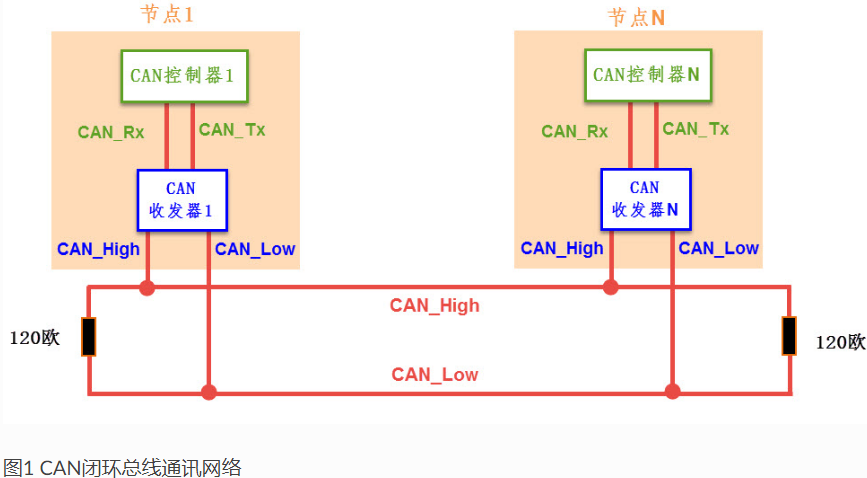
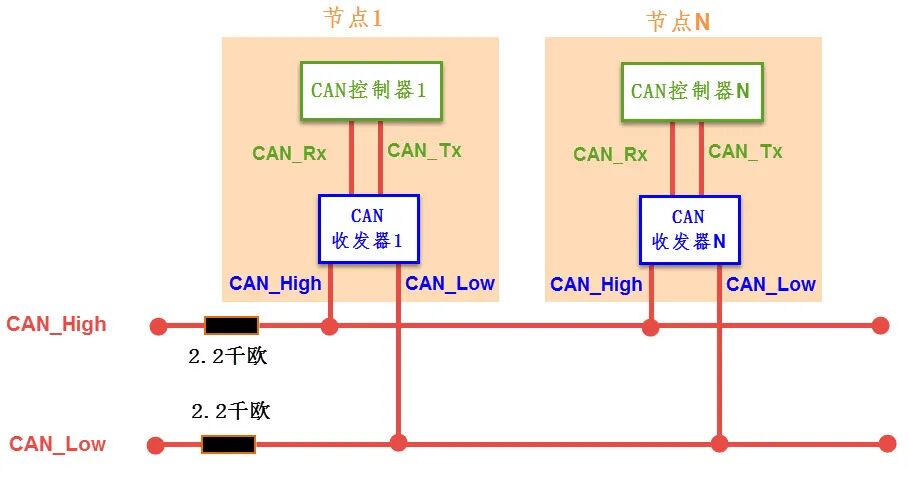
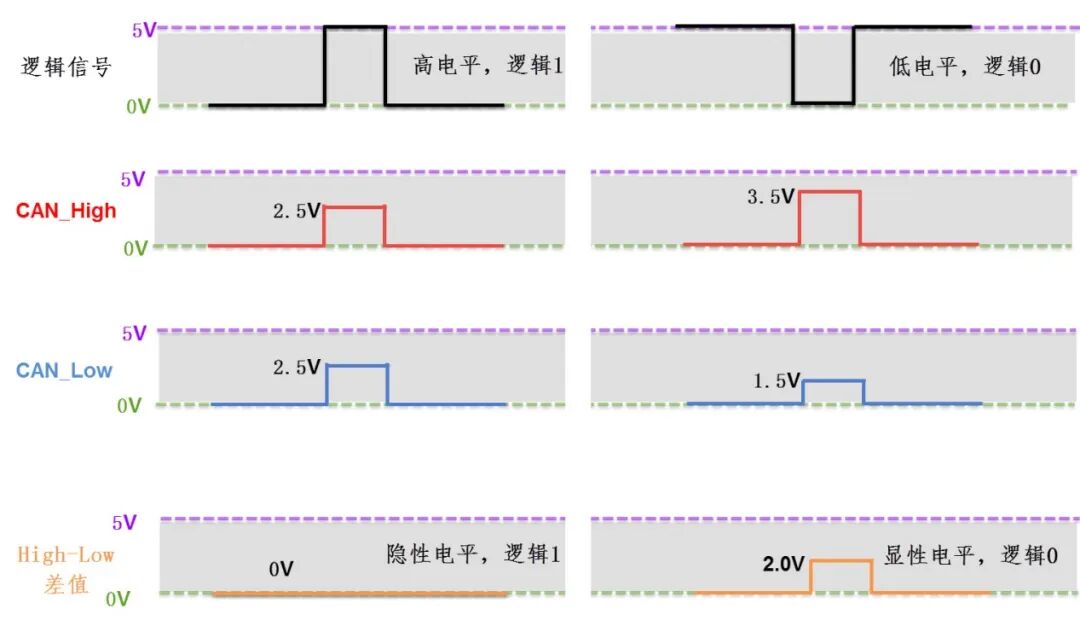
CAN是一种基于差分信号的中高速总线协议,其多种硬件错误检测机制赋予它极强的抗干扰能力。
该协议无需中间件或协议栈,可直接操作寄存器,从而实现了高实时性。
内置的邮箱和FIFO等缓冲结构有效降低了CPU负载。
可使用逻辑分析仪、CAN盒、wireshark、UDS等多种诊断方法。
CAN在汽车工业和工业控制等领域具有不可替代的地位。
随着成本降低和速度要求越来越高,是否有一种新协议,既有CAN总线的实时性,又有以太网的高吞吐量的,我想可能就是工业以太网的EtherCAT和profinet了。
