三相变流器矢量控制及参数设计系列(1):引言
三相变流器是新能源发电、电机驱动等系统的核心部件。在变流器众多控制方法中,矢量控制技术因其卓越的静态和动态性能以及简单的控制和设计流程而脱颖而出,成为三相变流器领域的主流控制方案之一。
1 矢量控制技术简介
1.1 矢量控制的起源与发展
矢量控制技术源于20世纪70年代,由德国学者Felix Blaschke等人提出,旨在解决交流电机控制的难题。这种控制方法最初被称为"磁场定向控制",其核心创新在于通过坐标变换解决了交流电机中复杂耦合变量的解耦问题。在此之前,交流电机的控制性能无法与直流电机相媲美,因为直流电机的励磁电流和转矩电流可以分别独立控制,而交流电机的这些变量则高度耦合。
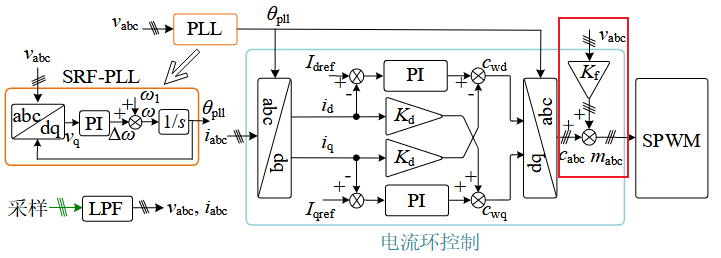
20世纪80-90年代,随着电力电子技术的发展和数字处理器的进步,矢量控制被成功应用于三相PWM变流器的控制中,使得有功分量和无功分量可以实现完全解耦,进行独立控制,大大提升了三相变流器性能。例如下图所示:
1.2 矢量控制的基本原理
矢量控制的基本原理是:将三相静止坐标系(abc)中的变量通过数学变换转换到同步旋转坐标系(dq)中。这一转换通过Clarke变换和Park变换实现:Clarke变换将三相静止坐标系转换为两相静止坐标系(αβ),而Park变换则将两相静止坐标系转换为同步旋转坐标系(dq)。在dq坐标系下,同步旋转的交流量变成了直流量,在对耦合量进行补偿解耦后,就可以分别控制d轴分量(如励磁,有功等)和q轴分量(如转矩,无功等)。
矢量控制技术的核心可总结为——
① 将三相交流分量转化为dq轴下的直流分量;
② 进行解耦,让dq轴分量相互独立;
③ 分别实现d,q轴直流分量的高性能控制。
基于上述原理,可归纳出三个关键的设计要点——
① 系统的分析模型需建立在dq坐标系下;
② dq坐标系下的解耦是实现高性能控制的前提;
③ 需要适合直流量的控制器。
2 PI控制器天然适配矢量控制技术
2.1 PI控制器简介
“95% 的问题可以用PID控制器完成,剩下的大部分问题可以通过改进PID控制器完成,只有少部分问题PID控制器无法胜任”类似于这样的表述在工程控制领域广为流传,这源于PID控制器结构简单、鲁棒性强、适用性广、参数整定和调试相对容易等特点。
现实中,由于微分环节对噪声极其敏感,因此PI控制器备受青睐。PI控制器由比例(Proportional)和积分(Integral)两个环节组成,比例环节提供快速响应能力,积分环节则确保系统稳态精度。PI控制器的s域表达式为:
![]()
从频域角度分析,PI控制器对直流量的增益理论上为无穷大,从而可以完全消除稳态误差,实现直流的无静差跟踪。这些特征使得传统PI控制器特别适合于矢量控制框架,可以很好地实现直流分量的高性能控制。
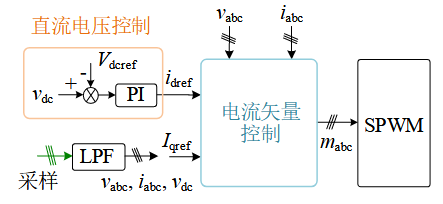
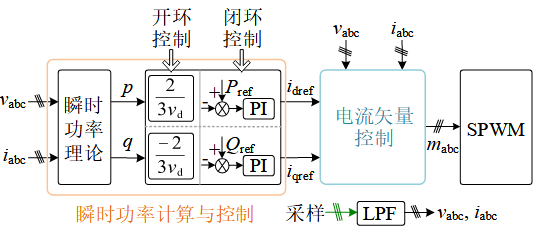
2.2 双环控制结构
在矢量控制框架中,PI控制器通常以双环结构存在:内环通常是电流环路,负责快速跟踪电流指令,抑制内部扰动;外环为功能环路负责实现相应功能,例如直流电压外环用于维持直流侧电压稳定,功率外环用于维持有功无功输出稳定,交流电压外环用于提高电压支撑等等。这种双闭环结构有效地分配了控制任务的频带宽度,内环负责高频动态响应,外环处理低频稳态调节。
在双环结构的基础上,还可进一步扩展功能环路,如下垂控制环路,VSG控制环路等。
然而,环路越多意味着——
① 累积的滞后越严重,系统稳定裕度(如相位裕度)会不断减小,更容易产生振荡或失稳(关键原因);
② 系统更复杂,维护成本和难度更大,参数设计和调试更困难;
③ 在采样周期内计算量更大,对硬块要求更高。
因此,实际系统中很少采用超过三个环路的控制结构。
2.3 PI参数设计原则
无论环路数量多少,应采用“内环响应快,外环响应慢”的设计原则,也就要求“内环控制带宽大,外环控制带宽小”。
2.3.1 为什么需要“内环响应快,外环响应慢”?
这是级联控制系统设计的核心原则,其根本目的是通过清晰的功能分工,使内外环的动态过程近似“解耦”。这样一来,可以
① 提升系统整体性能。通过这种分工,系统既能拥有内环带来的快速动态响应和强抗扰动能力,又能保证外环控制的高精度和稳态无差,让每个环路各司其职,从而实现整体性能的最优。
② 简化设计与调试。由于内环响应极快,从外环的视角来看,一个设计良好的内环可以被近似视为一个瞬时、理想的执行单元,即内环可以实时跟踪外环产生的参考值,闭环传函近似为1。这意味着外环的设计可以基于一个被简化了的被控对象模型,大大降低了系统设计的复杂性,也意味着可以先单独调试内环,将其性能优化到最佳,然后再闭合外环进行调试。
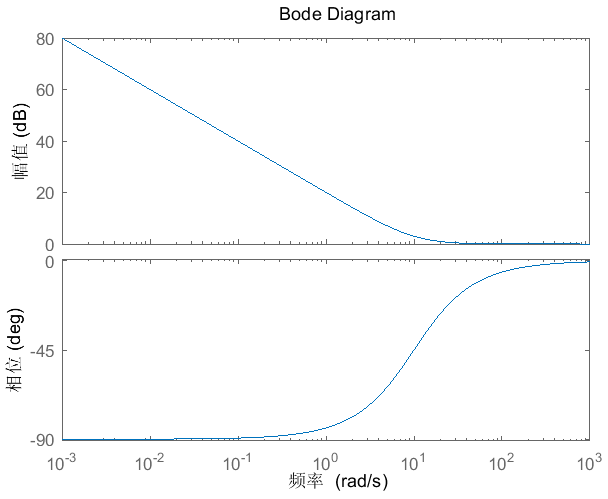
2.3.2 为什么“响应快需要控制带宽大”
快速变化的时域信号包含丰富的高频分量。控制器只有具备足够大的带宽,才能无衰减地通过这些高频分量,从而在输出端复现出快速的响应。控制系统的带宽(wb)通常定义为:闭环幅频特性曲线下降到 -3dB (即0.707) 时所对应的频率。在实际应用中,带宽常常近似为开环传函幅频特性曲线下降到0dB(即1)时所对应的频率(穿越频率wc),具体解释如下——
对于一个典型的单位负反馈系统,其闭环传递函数 T(s)与开环传递函数H(s)的关系为:
![]()
在w = wc 处,因为 ∣H(jwc)∣=1,所以
![]()
这个值的大小取决于H(s)在 wc处的相位angle(H(jwc)),或者说是相位裕度(PM=angle(H(jwc)) +180°)。可以分析一下几种典型情况:
①当相位裕度 PM = 90° 时:H(jwc)=1∠−90°=−j。
![]()
这恰好是 -3 dB 的定义。 所以,当 PM=90° 时,wc 精确等于 wb。
②当相位裕度PM = 60° 时:H(jwc)=1∠−120°= cos(−120°)+ jsin(−120°)=-0.5−jsqrt(3)/2。

所以,当 PM=60° 时,wc 稍小于 wb。
在工程设计时,相位裕度PM一般设计在60°到90°之间。此时,wb 通常比 wc 大一些,但两者数量级相同,且变化趋势完全一致,大致关系为:wb ≈ (1 到 2) * wc,具体系数取决于 PM,且PM越接近90°,wc就越接近wb。因此,将开环传递函数的穿越频率wc近似作为闭环系统的带宽wb是一种有效且合理的简化。
2.4 解耦控制
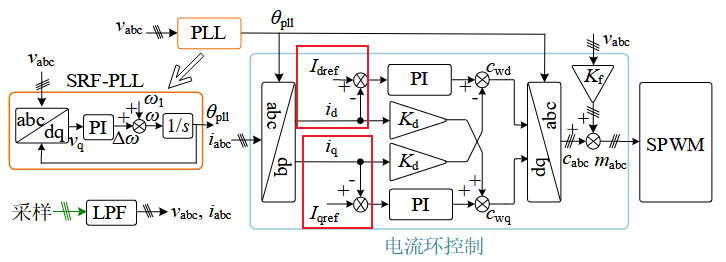
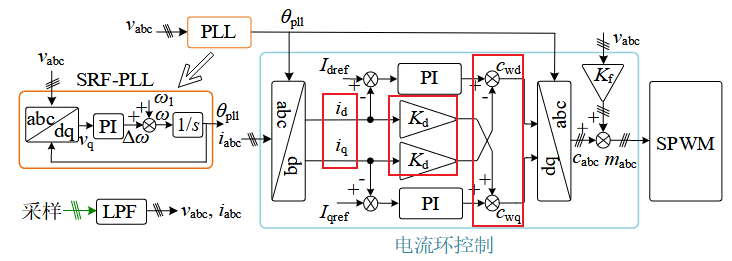
要实现解耦,就需要清楚存在什么样的耦合,将耦合量定量地描述出来。这样,才能知道“用什么量,经过什么环节,补偿到什么地方”能够抵消掉系统存在的耦合,实现解耦。例如下图红色方框内容:
2.5 前馈控制
在双环反馈解耦控制结构的基础上加入前馈,可针对已知扰动(如电网电压,电网电流等)进行直接补偿,减轻反馈环路的负担,进一步提高响应速度和控制精度。执行时也需要先定量描述出扰动情况,然后以抵消扰动为目的进行补偿。例如下图红色方框内容:
3 本系列内容简介
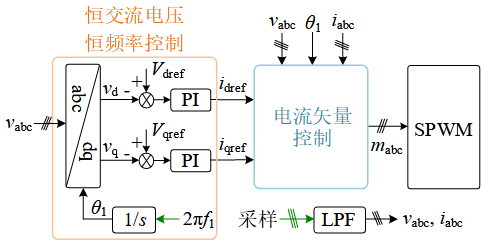
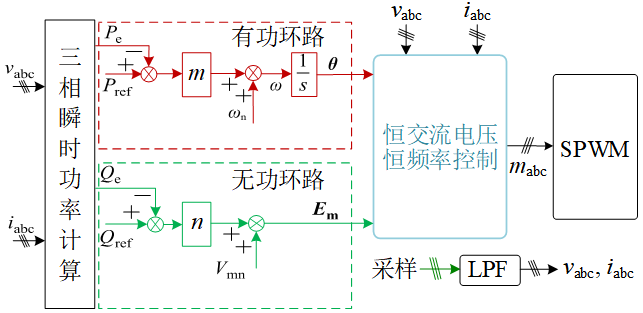
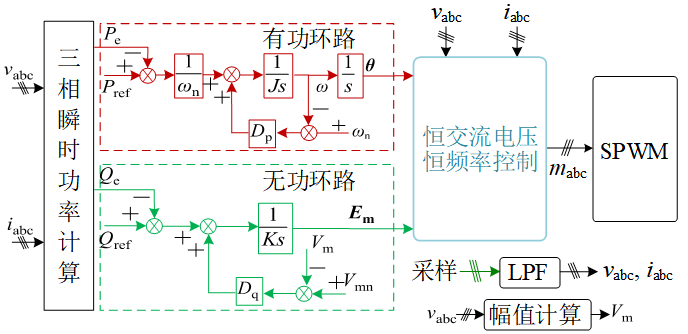
本系列内容将首先以矢量电流控制为基础进行介绍,带读者细致地分析解耦,前馈等环节的确定过程,理解控制结构中的各个部分,并介绍一种简单、可行的PI参数理论设计方法。在此基础上,由简到繁,举一反三,增加功能外环逐步介绍恒直流电压控制、恒功率控制、恒交流电压频率控制、下垂控制、虚拟同步机控制等经典控制策略的结构及PI参数设计方法。在介绍过程中,还会配合Matlab脚本和Simulink仿真等工具来验证理论分析的合理性。
本系列内容旨在让读者:
① 掌握dq坐标系下三相变流系统的分析方法,由此理解经典控制策略的结构;
② 掌握矢量控制架构下一种简单、可行的PI参数理论设计方法;
③ 学会用matlab软件辅助分析实际问题。
以上就是本文全部内容啦!觉得有用还请多多支持一下吧,您的支持是我创作最大的动力。