强化学习(4)策略梯度与TD Learning
这里我们会聊一下策略梯度与TD Learning的关系
策略梯度与 TD Learning 的关系:Actor-Critic 架构
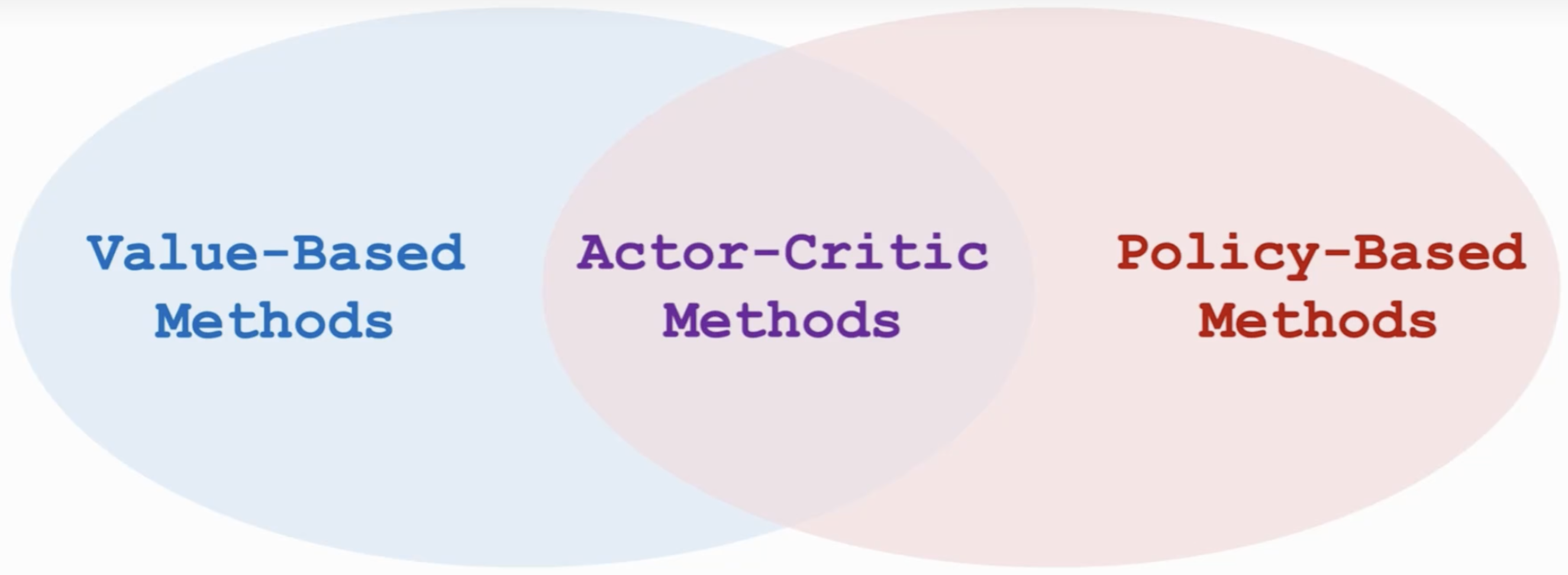
策略梯度和 TD Learning 并不是互相排斥的,它们的关系是互补的,并且它们最常在 Actor-Critic(演员-评论家) 架构中被同时使用。
简单来说:
- 策略梯度(Policy Gradient) 负责 行动(Actor):它直接学习 做什么动作 (π\piπ)。
- TD Learning 负责 评估(Critic):它学习 动作有多好 (VVV 或 QQQ)。
1. 为什么需要结合?(TD Learning 解决策略梯度的问题)
单独使用策略梯度方法(如 REINFORCE)有一个致命的弱点:方差(Variance)太大。
策略梯度的更新公式通常需要使用完整的回报 GtG_tGt(即从当前时间步到回合结束的所有奖励的折扣总和)来衡量当前动作的好坏。
梯度∝E[∇θlogπ(At∣St)⋅Gt]\text{梯度} \propto \mathbb{E} [\nabla_\theta \log \pi(A_t|S_t) \cdot G_t]梯度∝E[∇θlogπ(At∣St)⋅Gt]
由于 GtG_tGt 是一个随机变量(取决于后续所有状态和动作),它的波动性很大,这使得梯度估计很不稳定,导致训练收敛慢,甚至可能发散。
TD Learning 如何解决?
TD Learning 通过估计 价值函数 V(s)V(s)V(s) 或 Q(s,a)Q(s, a)Q(s,a),为策略梯度提供一个低方差的基准(Baseline)或优势估计(Advantage Estimate)。
优势函数 A(s,a)=Q(s,a)−V(s)\text{优势函数} \ A(s, a) = Q(s, a) - V(s)优势函数 A(s,a)=Q(s,a)−V(s)
在 Actor-Critic 架构中,策略梯度的更新公式变为:
梯度∝E[∇θlogπ(At∣St)⋅At]\text{梯度} \propto \mathbb{E} [\nabla_\theta \log \pi(A_t|S_t) \cdot A_t]梯度∝E[∇θlogπ(At∣St)⋅At]
这里的 AtA_tAt (优势函数)就是通过 TD Learning 实时计算和更新的。
- 价值函数 V(s)V(s)V(s)(由 Critic 学习)充当了期望基准:它告诉 Actor 在状态 sss 下平均能获得多少回报。
- 优势函数 A(s,a)A(s, a)A(s,a):它告诉 Actor 采取动作 aaa 比平均预期好多少。
将 GtG_tGt 替换为 AtA_tAt,可以大幅减少梯度的方差,因为 TD 估计比完整的蒙特卡洛回报 GtG_tGt 稳定得多,从而使训练更稳定、更快速。
2. Actor-Critic 架构的工作流
现代高效的 RL 算法(如 A2C, A3C, PPO)都是基于这个思想:
暂时没有了解到GRPO等更先进的算法,以后补充
| 角色 | 学习对象 | 学习方法 | TD Learning 的作用 |
|---|---|---|---|
| Actor (演员) | 策略 π(a∣s)\pi(a|s)π(a∣s):决定如何行动。 | 策略梯度 | 利用 Critic 提供的 优势函数,指导策略朝更有利的动作方向更新。 |
| Critic (评论家) | 价值函数 V(s)V(s)V(s):评估当前状态有多好。 | TD Learning | 使用 TD 误差来更新 V(s)V(s)V(s) 的估计,确保对优势函数的评估是准确的。 |
所以Critic(TD Learning)通过不断学习和提供准确的价值评估,来指导 **Actor(策略梯度)**进行高效且稳定的策略改进。
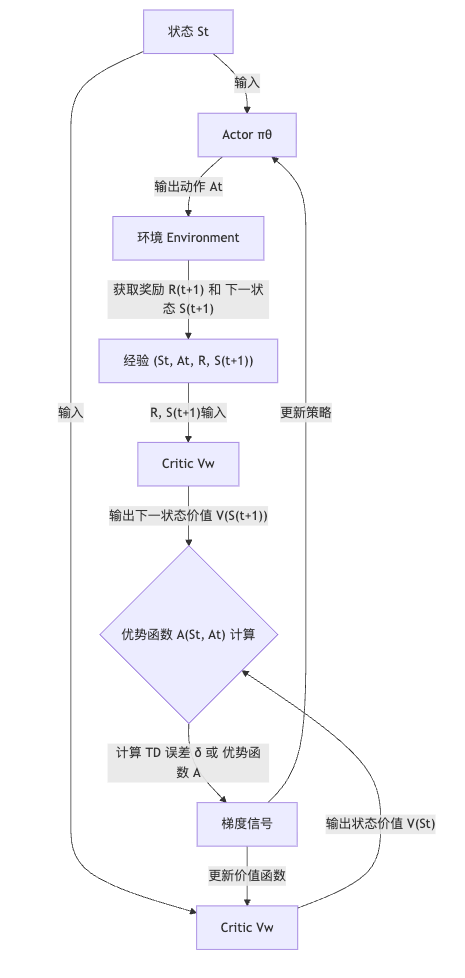
整个学习过程在一个连续的循环中进行:
| 步骤 | 角色 | 行动 | 关系与 TD Learning | |
|---|---|---|---|---|
| 1. 观测与输入 | 环境 & Actor/Critic | 智能体观测到当前状态 St,并将 St 输入给 Actor (π\piπ) 和 Critic (V) 两个网络。 | 起始 | |
| 2. 决策 (Actor) | Actor (πθ\pi _ θπθ) | 根据策略 π\piπ 输出动作 At。 | 策略梯度的实现。 | |
| 3. 评估 (Critic) | Critic (VwV_wVw) | 根据当前状态 St 输出状态价值的估计 V(St)。 | TD 学习的估计值。 | |
| 4. 交互与反馈 | 环境 | 执行动作 At,环境返回即时奖励 Rt+1 和下一状态 St+1。 | 经验数据的获取。 | |
| 5. 计算 TD 目标 | Critic (再次) | 将 St+1S_{t+1}St+1 输入 Critic,得到 V(St+1)V(S_{t+1})V(St+1) 的估计。 | 准备计算 TD 目标。 | |
| 6. 计算误差信号 | TD Learning | 计算 TD 误差 (δt),这也是 Critic 的损失函数: | δt=Rt+1+γ⋅V(St+1)−V(St)δt=R_{t+1}+\gamma · V(S_{t+1})−V(S_t)δt=Rt+1+γ⋅V(St+1)−V(St) | TD 学习的核心。 |
| 7. 策略更新 | Actor (πθ\pi _θπθ) | Actor 使用 TD 误差 δt(通常作为优势函数 At 的近似)来更新其策略参数 θ。∇θ∝δt⋅∇logπ(At∣St)\nabla \theta \propto \delta_t \cdot \nabla \log \pi(A_t | S_t)∇θ∝δt⋅∇logπ(At∣St) | ||
| 8. 价值更新 | Critic (VwV_wVw) | Critic 使用 TD 误差 δtδ_tδt 来更新其价值网络 V 的参数 w,使其对 V(St)V(S_t)V(St) 的估计更准确。 | TD 学习的更新,确保 Critic 评价更精确。 |
核心理解:双向反馈
- Critic 驱动 Actor: Critic 的输出 δt 直接告诉 Actor:“你这次的动作 At 比预期的好/坏了 δt 这么多!” Actor 根据这个准确的反馈调整策略,而不是依靠波动性大的完整回报 Gt。
- Actor 驱动 Critic: Actor 的探索会产生新的经验,Critic 利用这些新经验不断修正其 V(s) 估计,从而使自己成为一个更准确的“评论家”,为 Actor 提供更好的指导。
这就是 Actor-Critic 架构高效且稳定的原因:策略梯度负责探索,TD 学习负责稳定评估。