《自动控制原理》第 2 章 线性控制系统的数学描述:2.1、2.2
分析研究控制系统的首要问题是:将反映系统特性的各变量之间的关系用数学方程加以描述从而建立起控制系统的运动方程(即控制系统的数学模型)。
因此讨论控制系统的数学描述方法,以及按照这些方法建立系统的数学模型,这是自动控制理论的基础性工作。
在这一章里主要介绍:线性控制系统的两种基本数学描述方法、和由此而产生的两类基本数学模型的特点、图示方法、以及它们之间的相互转换关系;
此外还介绍根据工作机理建立系统数学模型(简称机理建模)的基本方法,以及不间物理系统之间相互模拟研究的相似性原理;并对线性连续系统理论的一个主要数学基础:拉普拉斯变换,在2.2节进行简要介绍,以供读者复习或浏览。
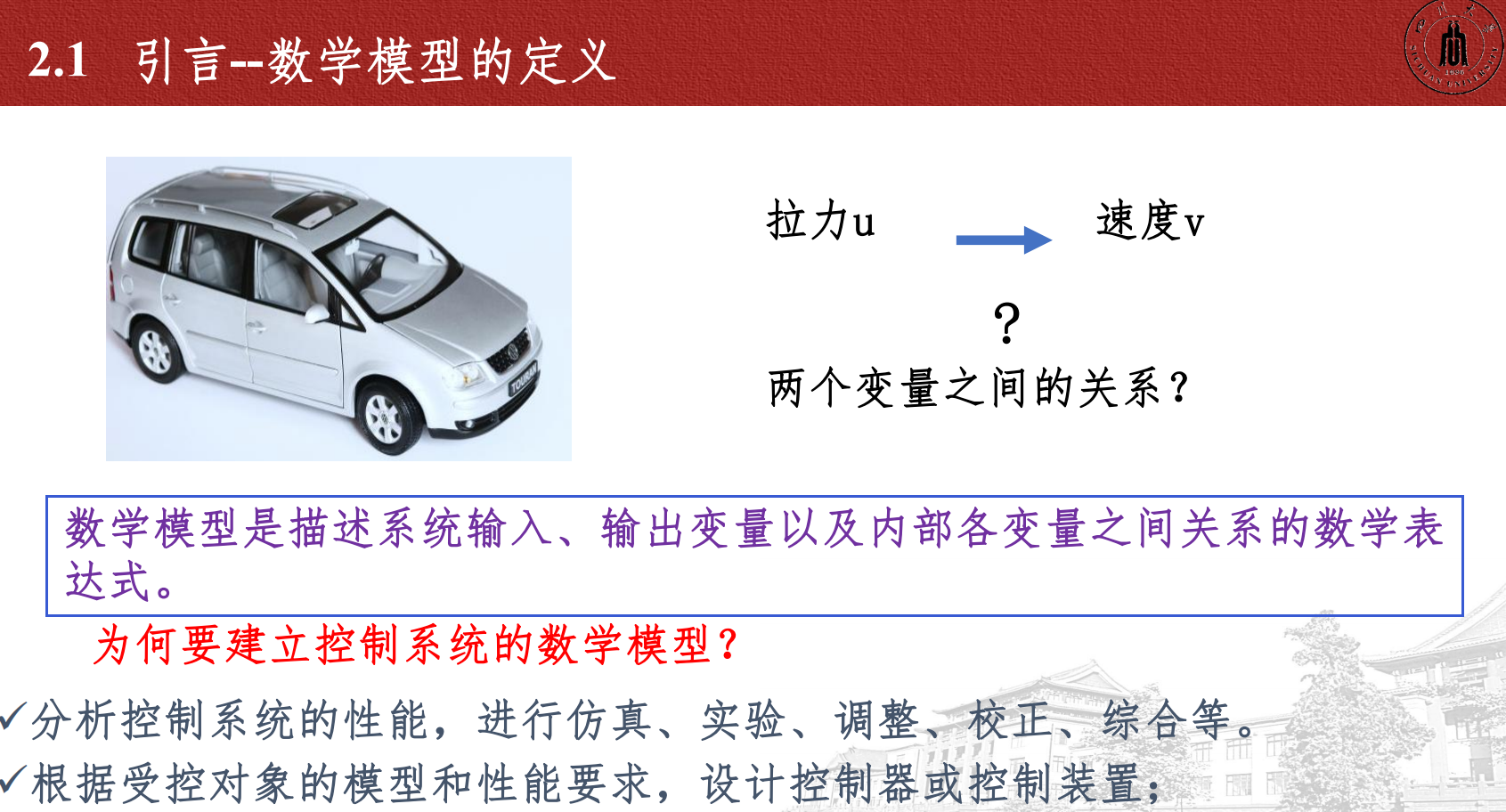
2.1 引言
自动控制的任务是:通过对系统信号的采集、传递和加工处理产生一个合适的控制作用,使受控对象的被控量能按预定的规律变化。
运动:通常泛指一切物理量随时间的变化为运动。
故控制理论讨论的问题可简单地概括为:研究控制系统运动的规律和特性。
系统分析:对于给定的控制系统,研究系统运动有哪些规律和特性,这就是所谓系统分析的问题。
系统综合:问题是设计控制系统使它的运动具有所要求的规律和特性。
控制系统的数学模型:既然我们的任务是研究系统的运动,那么就必须把反映系统运动特性的各变量之间的关系用数学方程加以描述,从而建立起控制系统的运动方程,通常称为控制系统的数学模塑。它是控制系统分析和综合以及计算机仿真研究的基础。
控制系统属于动态系统,
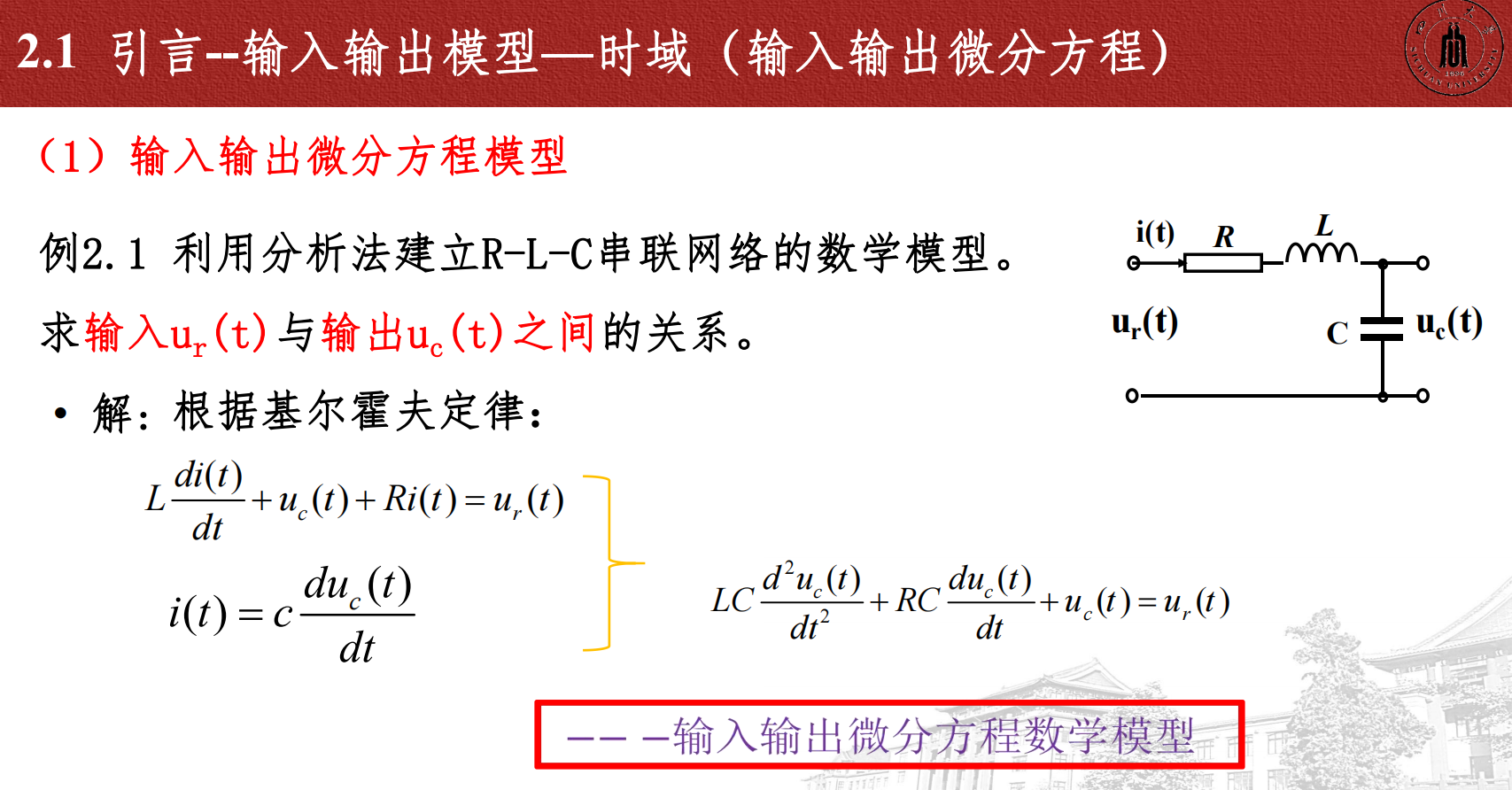
- 描述连续系统运动的基本方程为微分方程。
- 描述离散系统运动的基本方程为差分方程。
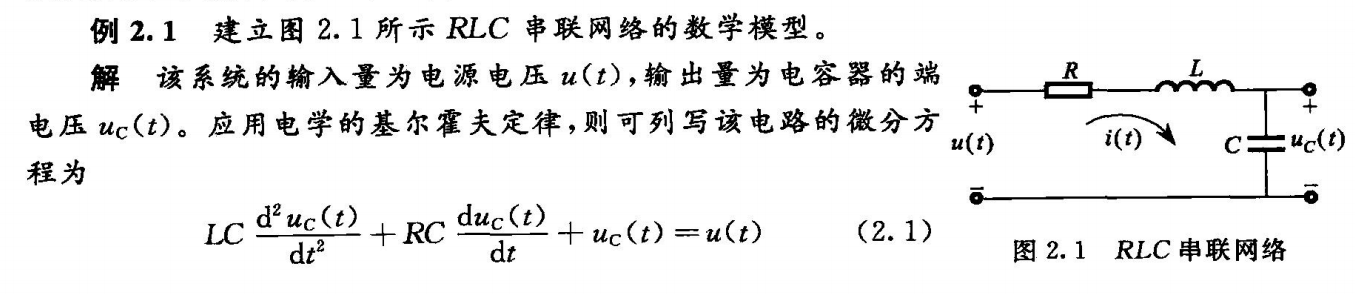
为了说明控制系统数学描述的基本方法、以及所建立的数学模型的基本类型和特点,先考察下列两个简单的系统。
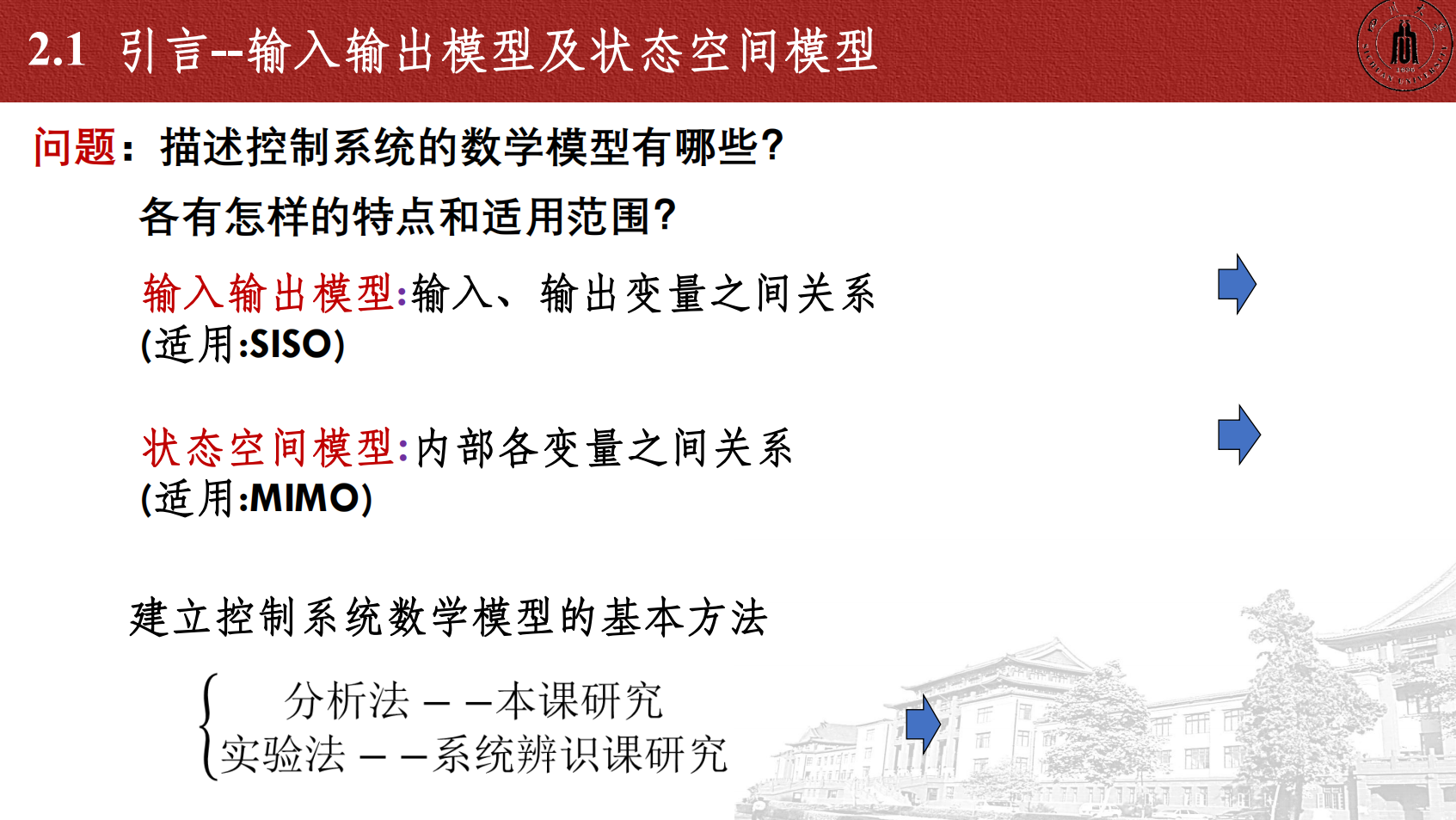
如上:系统的输入输出模型。

状态变量:……;n维状态向量:……。
式(2.3)或式(2.2)是采用状态变量描述系统运动的二元一阶微分方程组,称为该系统的状态空间表达式。其中式(2.3)的第一个方程称为状态方程,第二个方程称为输出方程。
……
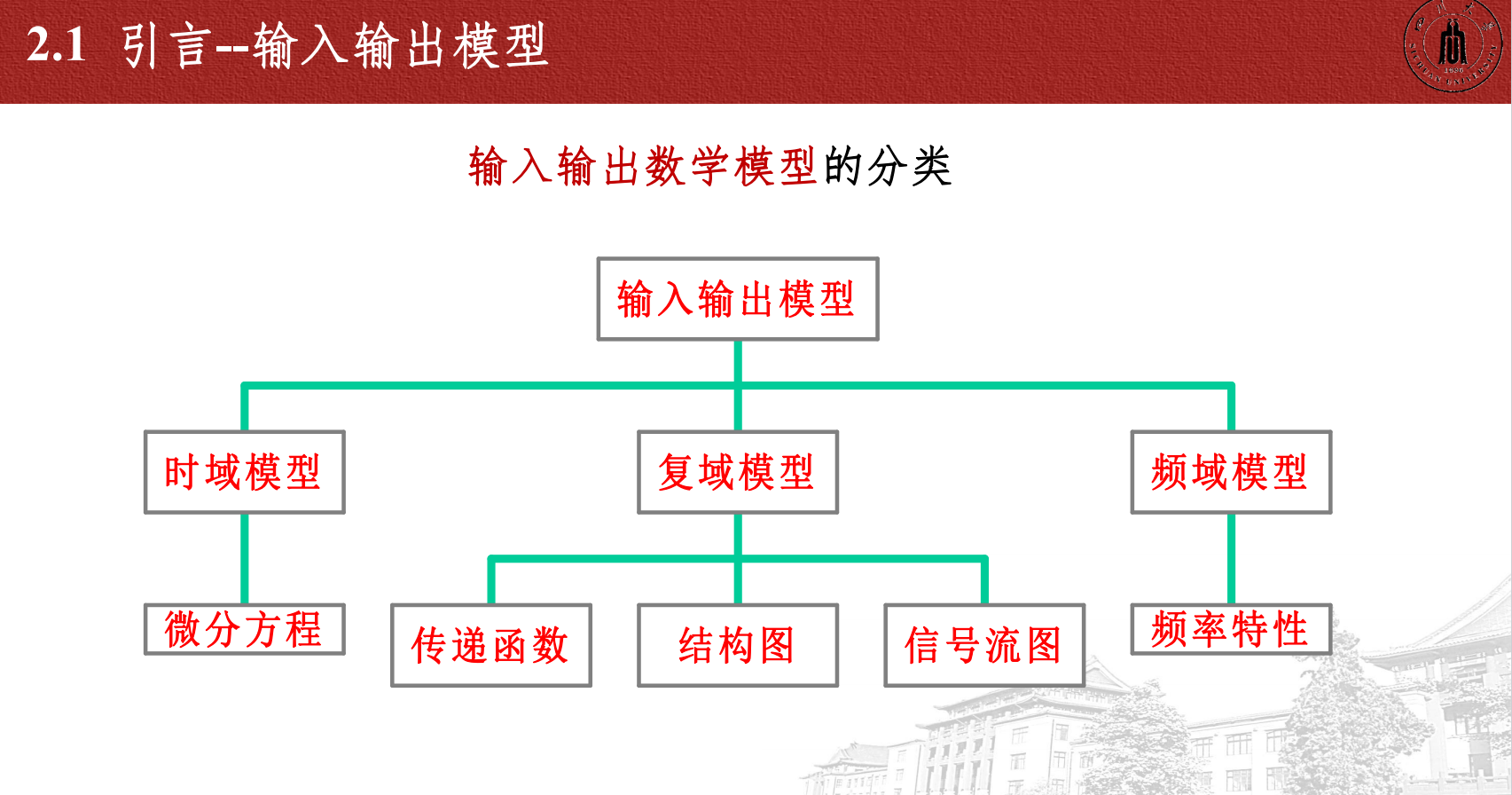
线性控制系统的两种基本数学描述方法和相应的两类基本数学模型
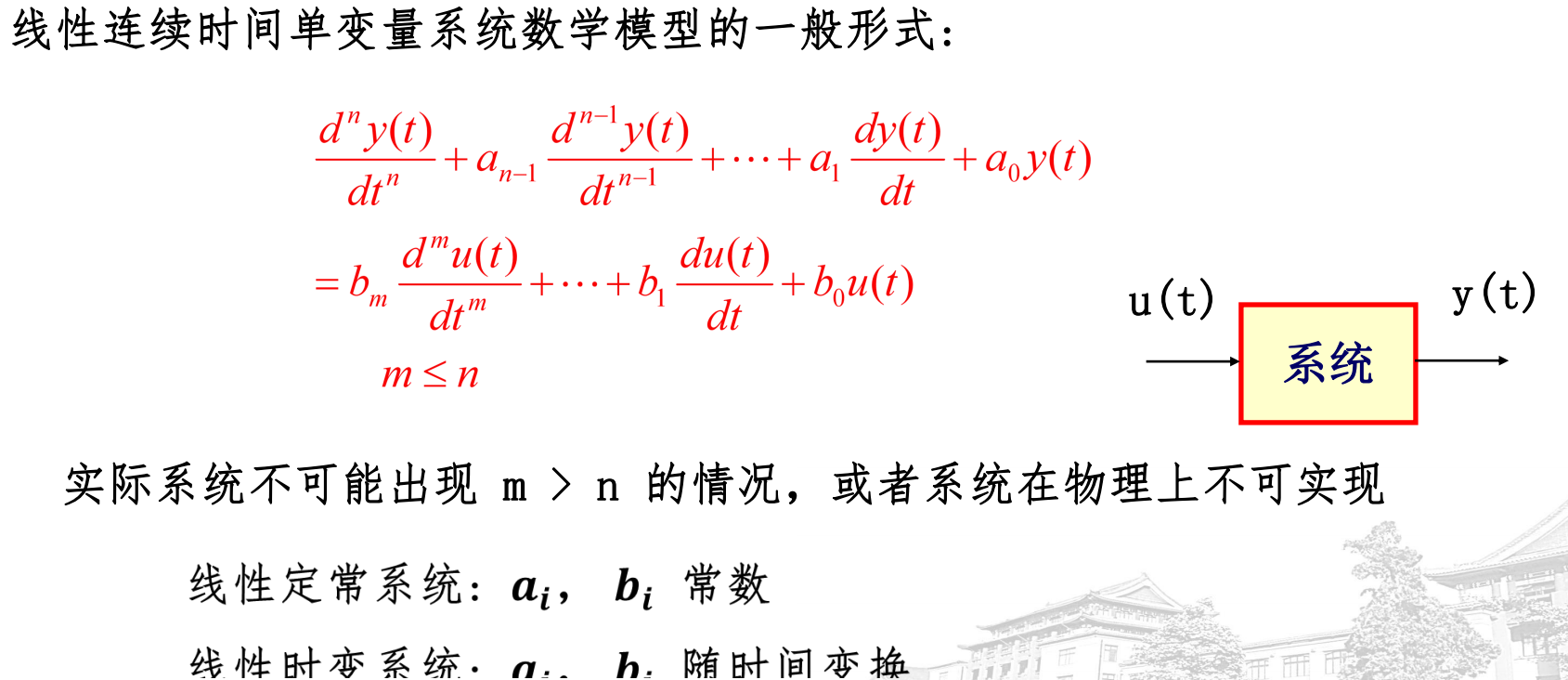
综上所述可见:线性控制系统属于动态系统,描述连续系统运动的基本方程为微分方程。
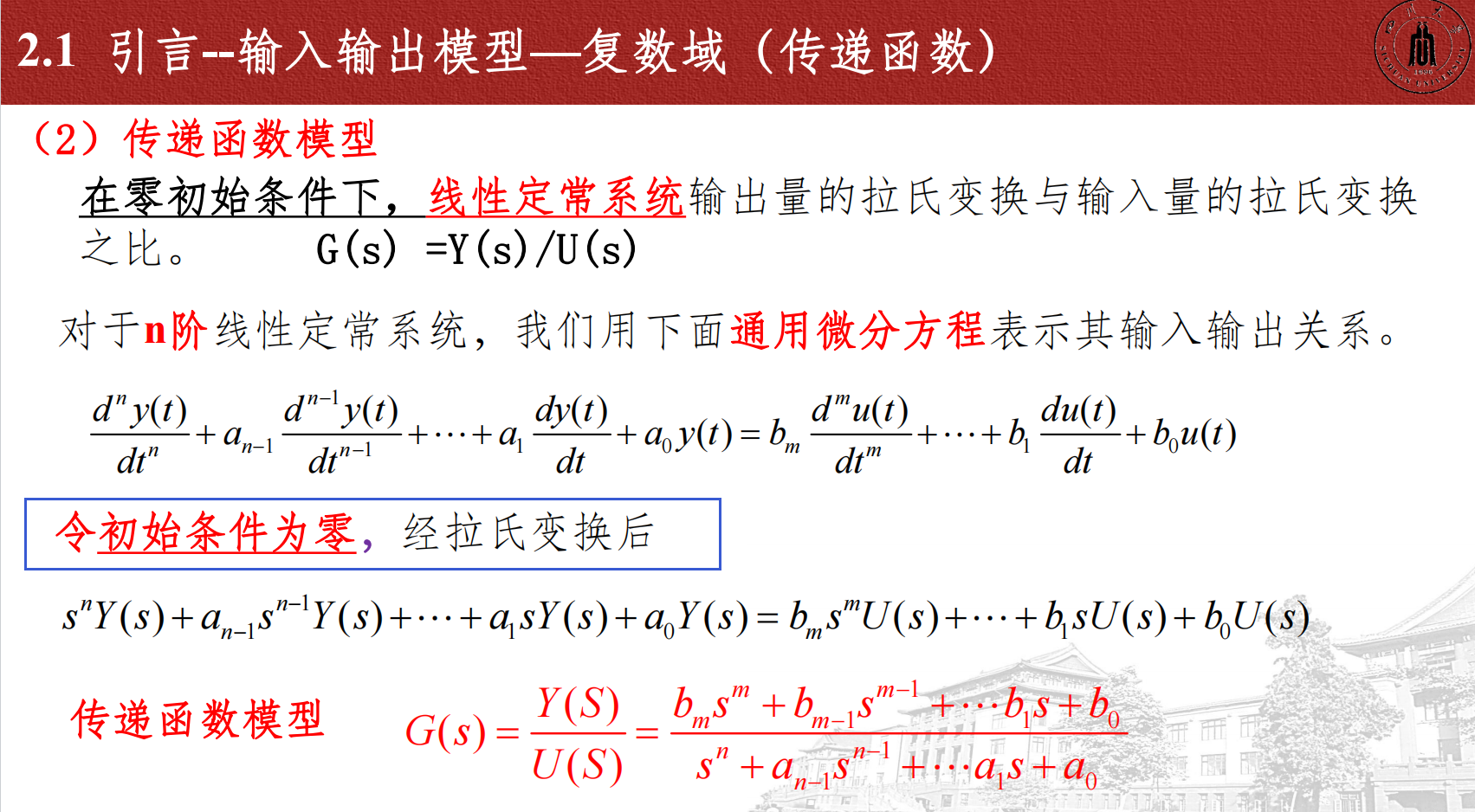
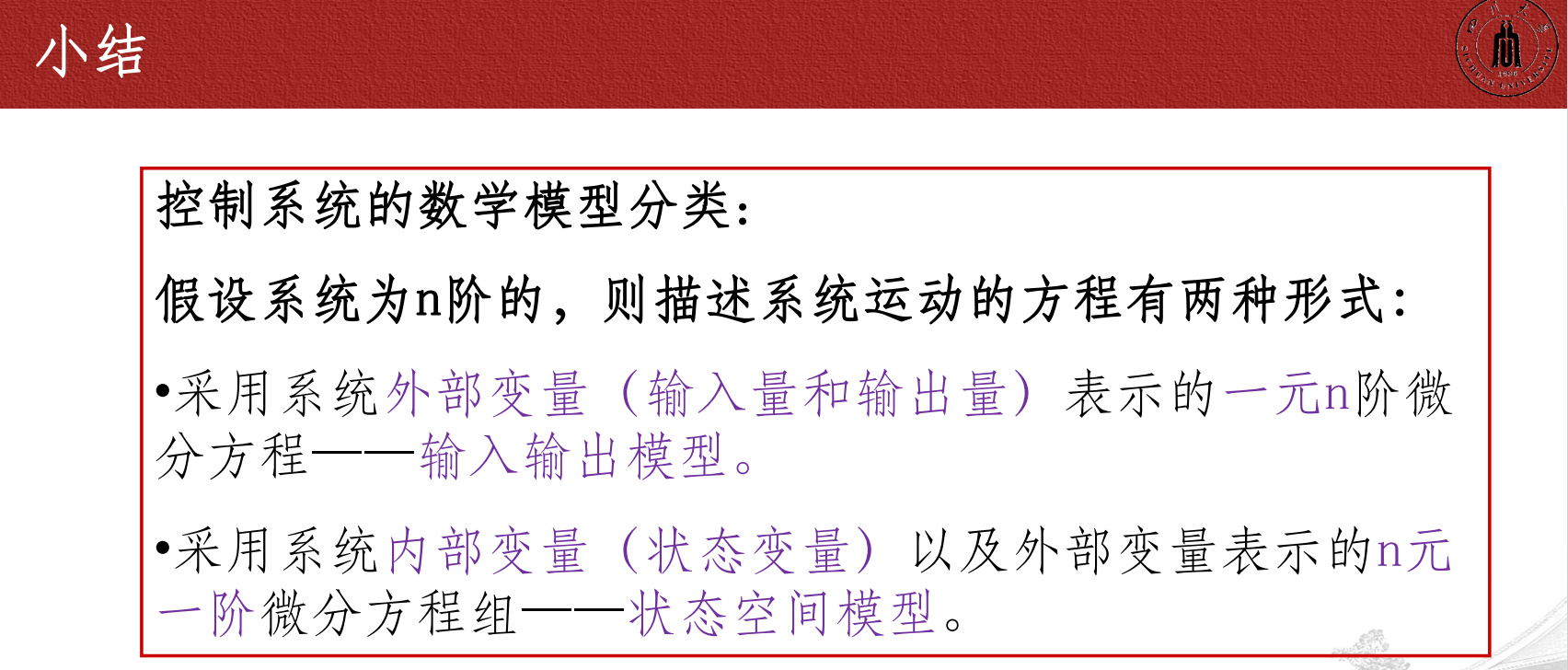
假设系统为n阶的,描述系统运动的微分方程可以写成两种基本的形式:
- 采用系统外部变量(输入量和输出量)表示的一元n阶微分方程;
- 采用系统内部变量(状态变量)表示的n元一阶微分方程组;
因此线性控制系统有两种基本描述方法:
- 采用外部变量并以输入输出方程描述的方法,称为外部描述法(输入输出描述法);
- 采用内部状态变量并以状态空间表达式描述的方法,称为内部描述法(状态空间描述法);
应用这两种基本描述方法建立的线性控制系统数学模型也有两类:
- 输入输出模型;
- 状态空间模型。
这两种基本数学描述方法,和相应的两类基本数学模型,是系统分析与综合的基础,也是后面将展开讨论的主要内容。
建立控制系统的数学模型(简称建模)的基本方法有两种:分析法和实验法。
① 分析法(机理建模法)
通过对系统各部分运动机理的分析,根据它们所遵循的物理规律或化学规律以及技术数据,进行推导从而建立起系统的数学模型。
这种建模法又称为机理建模法。
- 优点:所研究的系统并不要求已经建立,因而在控制系统的设计阶段具有重要的意义;而且所建立的模型对于同类系统具有一定的普遍意义,适用于该系统的不同设计方案。
- 缺点:对于较复杂系统,导出的数学模型可能较繁杂,不便使用;对于复杂系统其内部过程和机理较复杂,往往难以进行机理建模。
② 实验法(黑盒子法)
对系统施加某种测试信号,测取其输入输出数据,然后应用适当的方法确定系统的输入输出模型(将在5.9节作初步介绍)。
- 优点:不要求具有对所研究系统的专业知识和对运动机理的详细了解,通常可建立较为实用的模型。
- 缺点:所研究的系统必须已建立,因而在系统的设计阶段难以应用;而且所建立的模型往往只适用于该系统,不具有通用性。
实验法又称为系统辨识,它已发展成为一门独立的学科分支,有专门的课程介绍,本书不作详细讨论。
用实验法也可建立系统的状态空间模型,常用的方法是:首先采用系统辨识,建立系统的输入输出模型,然后再由所得外部模型,导出系统的状态空间模型。
这后一步骤称为实现问题,后面将对此展开讨论。
2.2 拉普拉斯变换
拉普拉斯变换是法国学者拉普拉斯(P.S.Laplace)首先提出的一种积分变换。
它是:求解线性常微分方程,和建立线性系统的复频域数学模型——传递函数和频率特性的有力数学工具。
因此拉普拉斯变换(简称拉氏变换)是线性连续系统控制理论的一个重要数学基础,也是学习本书上册所涉及的主要数学工具。
应用拉氏变换求解线性常微分方程的方法是:
- 首先对微分方程取拉氏变换,将时间函数的微分方程转化为对应象函数的代数方程;解代数方程求得象函数,然后对该象函数取拉氏反变换,则可求得原微分方程时间函数的解。
读者大多在“积分变换”课程中已经学习过,现针对控制工程的特点,对拉氏变换的三方面主要内容简介如下。
2.2.1 拉普拉斯变换的定义
在控制系统中所研究的信号f(t),大多是因果信号(t<0时,f(t)=0),或者信号虽不起始于t=0但问题的讨论只需考虑信号t≥0部分。
故下面研究的时间函数f(t)均假设定义于t≥0,而当t<0时 f(z)=0。
- 时间函数f(t)的拉氏变换将涉及在时间区间[0,∞]上的积分;
- 积分的下限可以规定为0的右极限0+(即t从右边趋于0并以0为极限)或0的左极限0-(即t从左边趋于0并以0为极限)。
- 考虑到控制系统在t=0时刻可能存在单位脉冲函数δ(t)及其各阶导数,故采用0-的定义。
拉普拉斯变换定义

s = σ + jω在二阶系统中的含义:
- σ:阻尼。
- ω:频率。

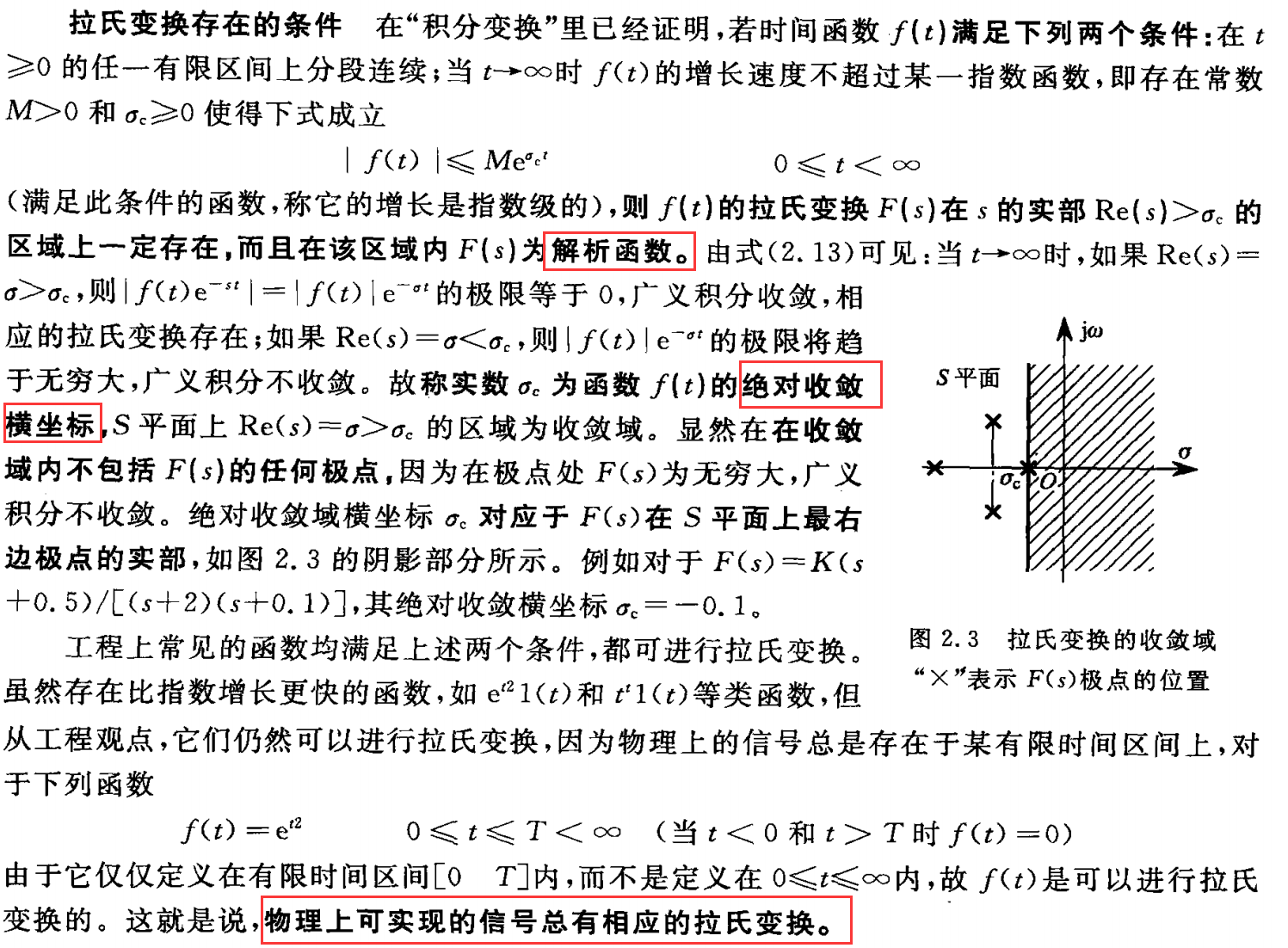
拉氏变换存在的条件
解析开拓原理与定义域
根据式(2.13)求得的时间函数的拉氏变换F(s),虽然只在Re(s) > 的收敛域内存在,但可以:
应用复变函数的解析开拓原理将F(s)的定义域扩充到整个复平面(除了F(s)极点之外)。
即在Re(s) > 区域,将,根据式(2.13)定义的象函数F(s),“解析开拓”到Re(s) ≤
区城,并将此F(s)直接定义为该区域的象函数,从而得到时间函数在整个S平面上(除了F(s)极点之外)都成立的拉氏变换。(解析延拓)
臂如上例在Re(s)>(
=-a)求得的指数函数的拉氏变换
![]() 可以解析开拓到整个S平面上(除了F(s)极点“-a”之外)都成立。
可以解析开拓到整个S平面上(除了F(s)极点“-a”之外)都成立。
这样今后便可借助拉氏变换这一有效工具,在S平面上对线性控制系统进行分析和综合。
向量和矩阵的拉氏变换
常用拉氏变换对
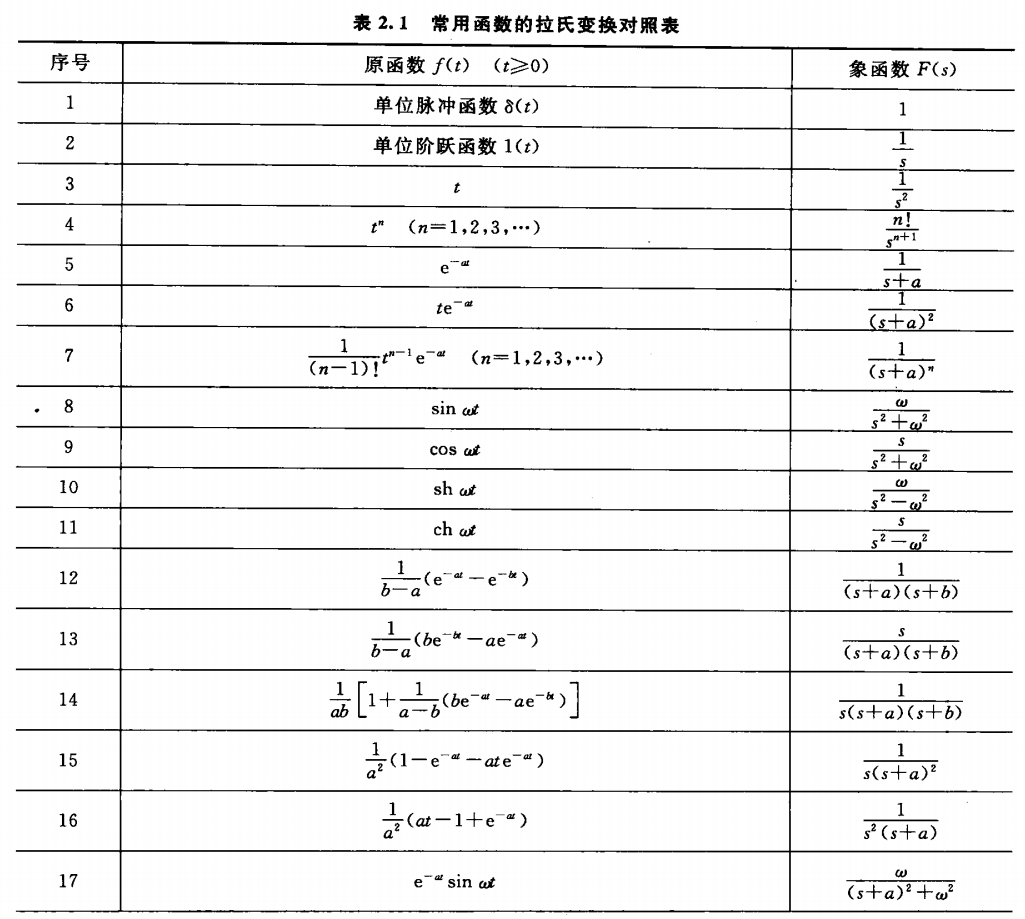
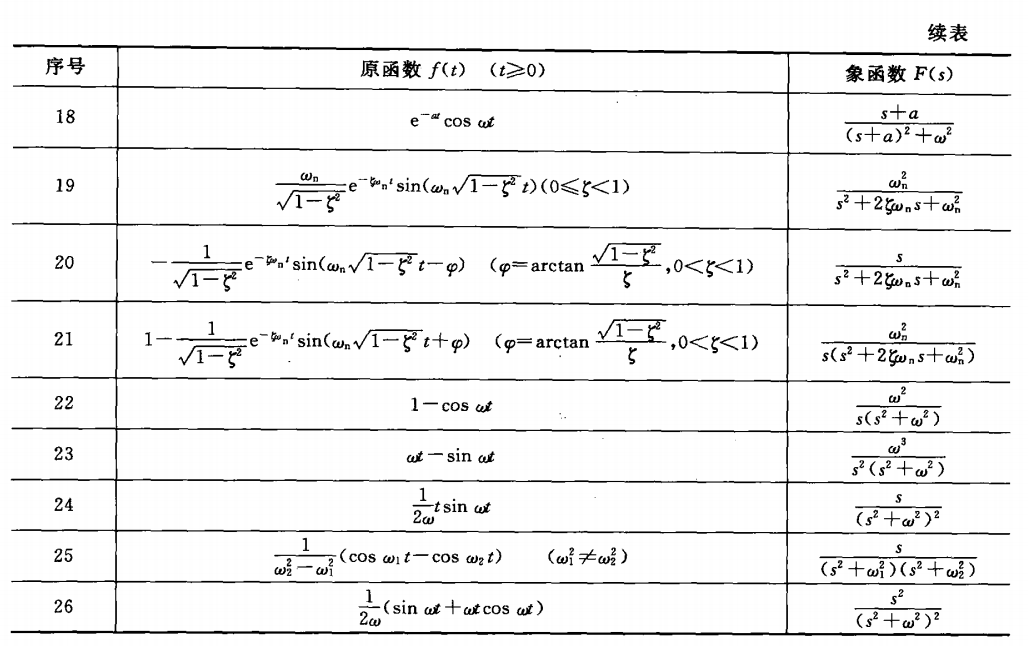
在今后实际工作中,并不要求根据式(2.13)用广义积分的方法求函数的拉氏变换,有现成的拉氏变换表可查。
特别是掌握了下面将要介绍的拉氏变换的性质,再使用查表的方法,就能更快地找到所求函数的拉氏变换。
表2.1列出了控制工程中常遇到的一些函数的拉氏变换,以供查用。
2.2.2 拉氏变换的基本性质
- 拉氏变换建立了信号的时域描述和复频率域(简称复频城)描述之间的关系。
- 当信号在一个域内有所变化时,在另一个域内依然呈现相应的变化。
- 拉氏变换的性质(或定理)反映了这些变化的规律。
利用这些性质不仅可以简化拉氏变换的运算,而且将给系统的分析研究带来方便。
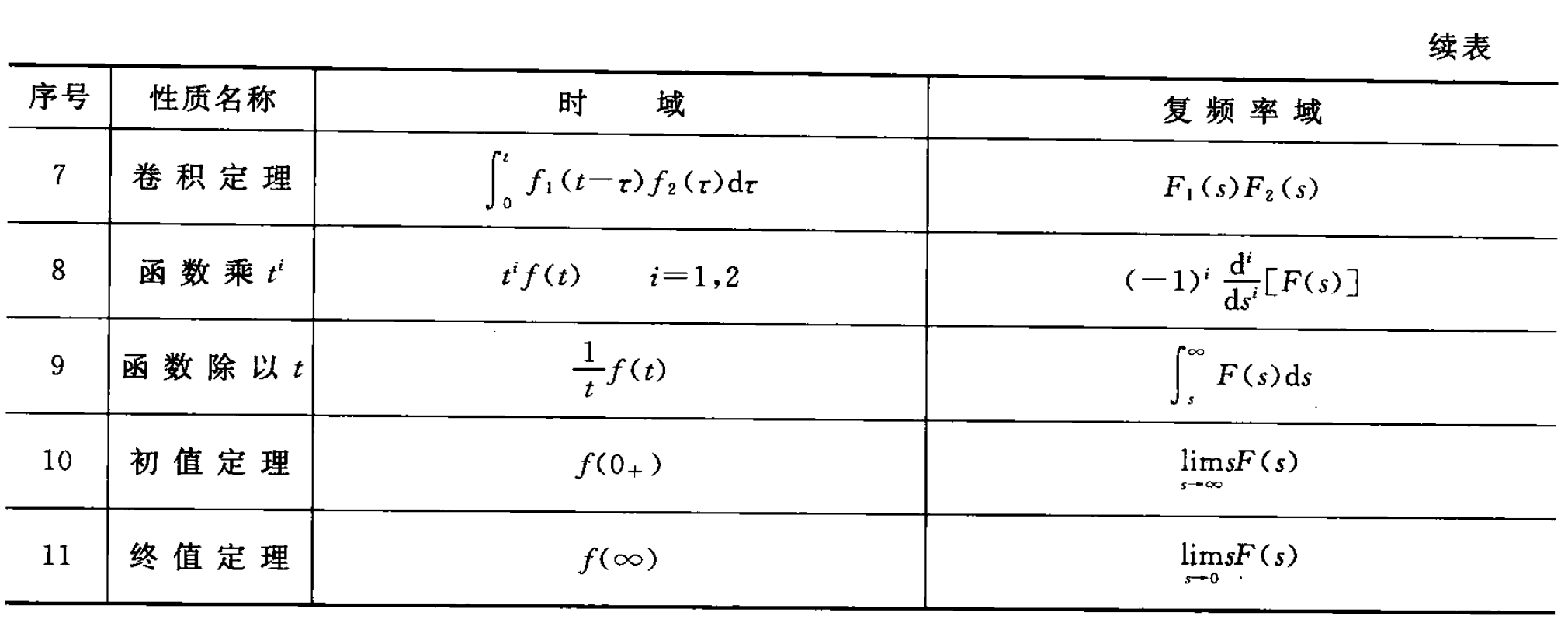
表2.2列出了常用的拉氏变换的基本性质,以备读者查用。
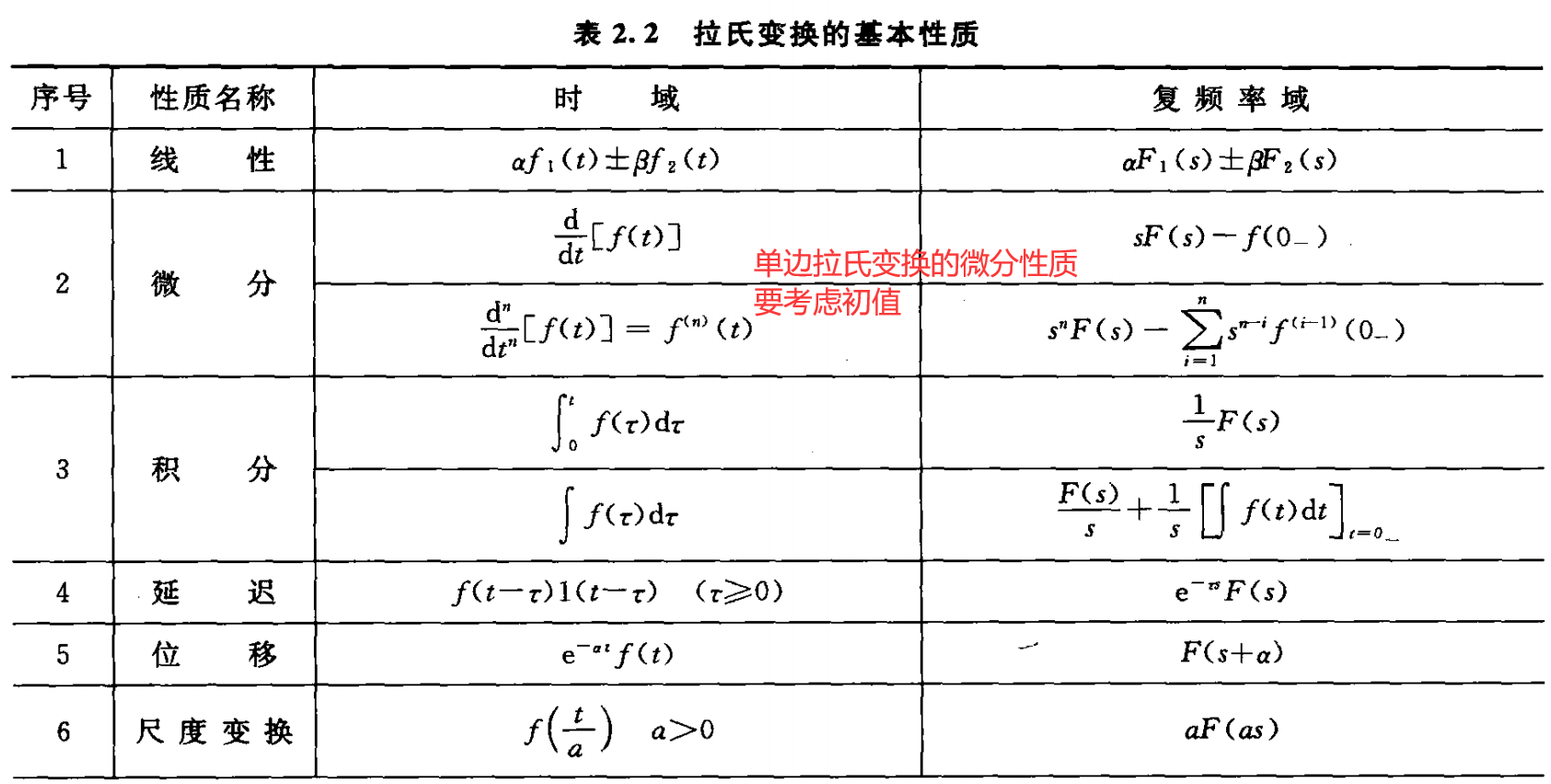
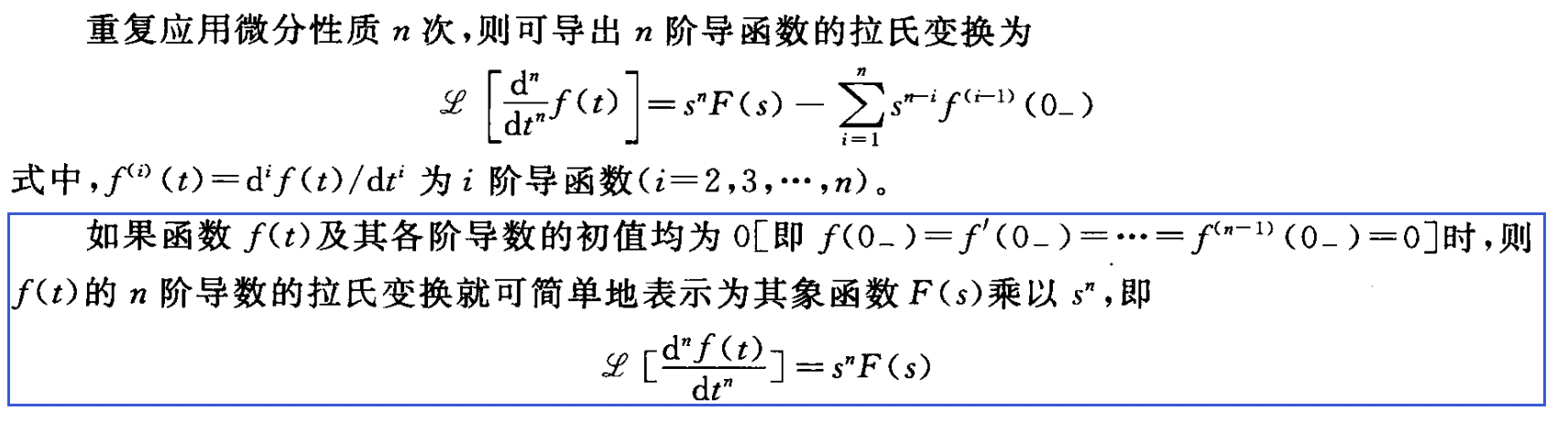
由于单边拉氏变换的微分性质要考虑初值,所以更适用于零初始状态的因果系统。
现对其中控制工程常用的一些性质(或定理)说明如下:

线性性质表明:函数线性组合的拉氏变换等于各函数拉氏变换的线性组合。
- 拉普拉斯变换具有线性性质,所以可以适用于线性系统。
- 由拉普拉斯变换可以求出线性系统的传递函数。
- 拉普拉斯变换(传递函数模型)主要适用于线性时不变系统。
- 将拉普拉斯变换应用于线性时变系统,由于时变参数的存在,计算出的传递函数模型很复杂,反而把问题复杂化了。

注:单边拉氏变换才需要减去初值。
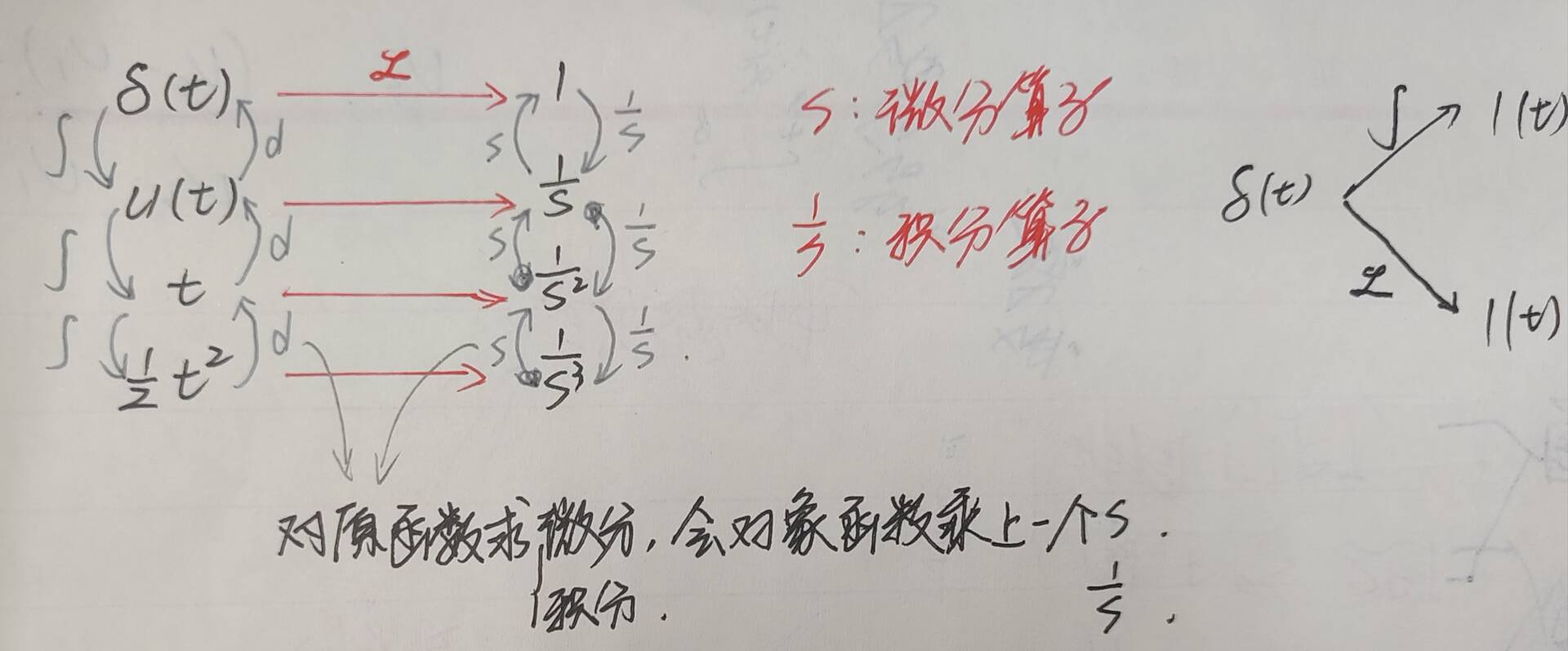
微分性质表明:一个函数求导后取拉氏变换等于该函数的拉氏变换乘以复变量,再减去函数的初值。
【重点】微分性质

初值定理表明:原函数f(t)在t = 0+的初值(即f(t)当t从右边趋于0的极限值,而不是t = 0-的初值),可通过其象函数F(s)乘以s,取s→∞时的极限来得到。
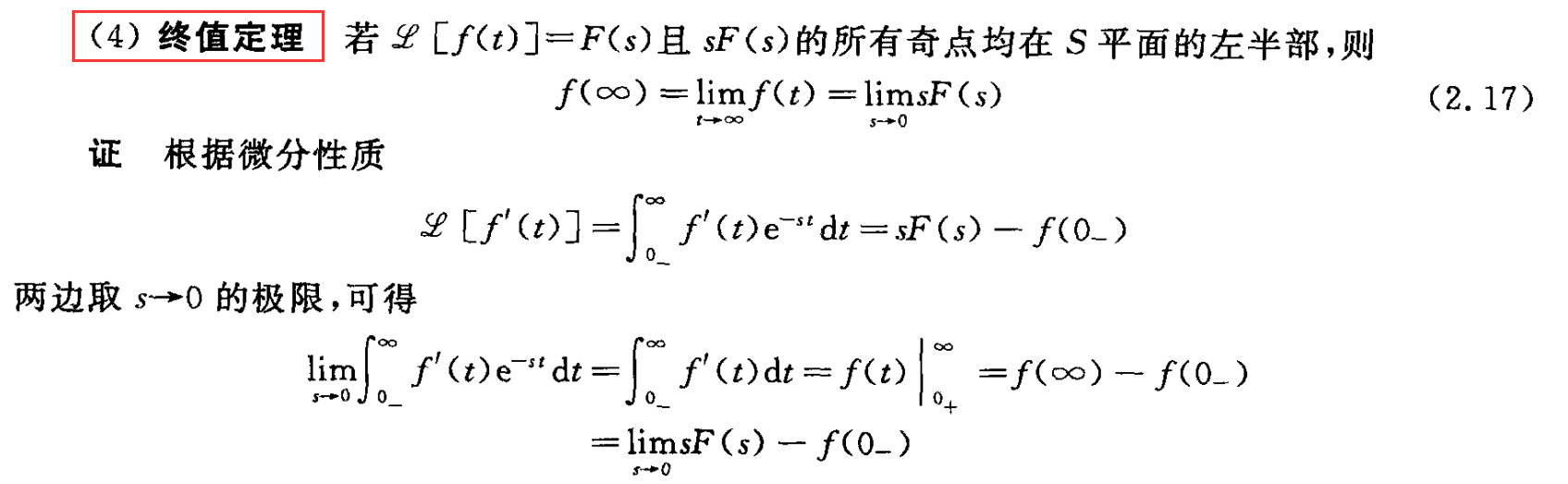
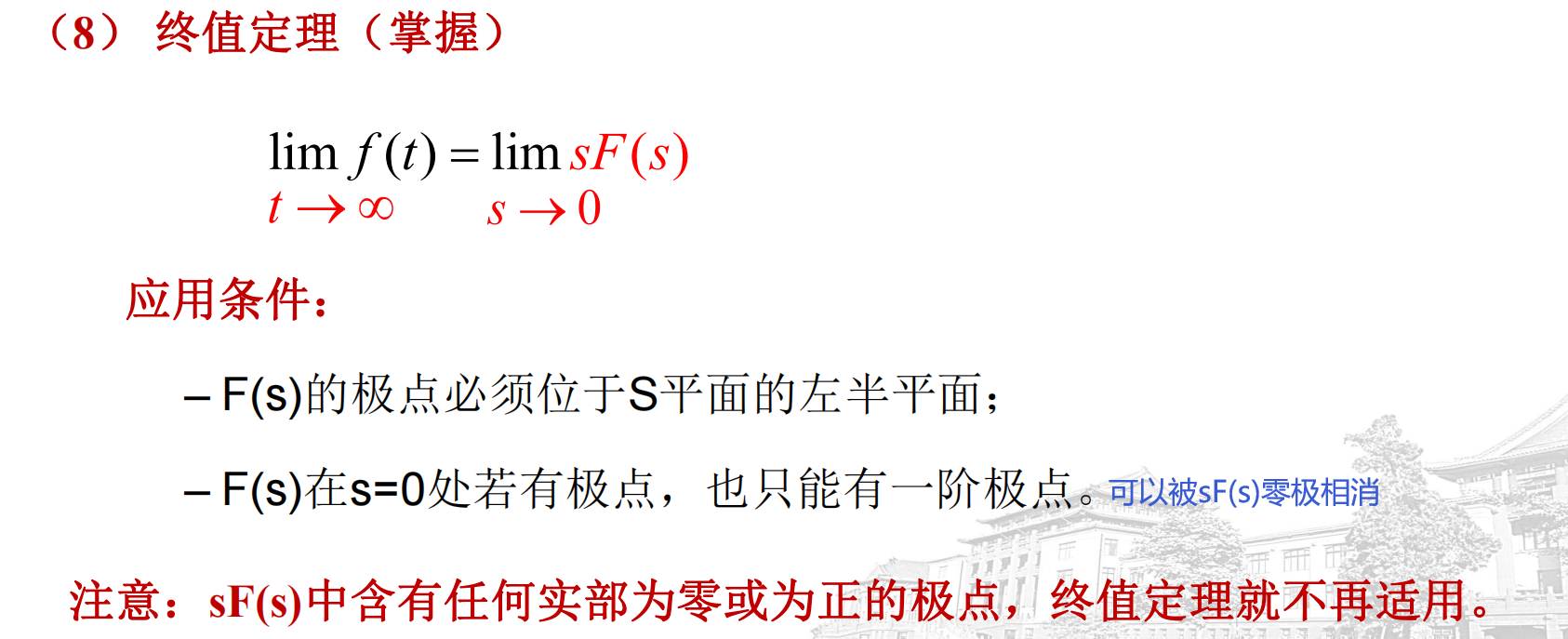
【重点】终值定理的适用条件
【终值定理的适用条件】
- 在上述的证明过程中,曾令s→0,这意味着此定理只对绝对收敛横坐标
<0的象函数sF(s)成立。
- 而
- 即终值定理只适用于除在原点处有一单极点外,所有极点均位于左半开平面的象函数F(s)。——这样sF(s)由于零极相消,sF(s)所有极点都位于左半开平面。
注:单极点——单个极点,也即一阶极点。
例如正弦函数f(t) = sinωt,其象函数 ![]()
![]() ,的极点位于s平面的虚轴上,不满足上述条件,故不能应用终值定理求其终值f(∞)。
,的极点位于s平面的虚轴上,不满足上述条件,故不能应用终值定理求其终值f(∞)。

终值定理的应用:求稳态误差。(使用前叙述满足使用条件)
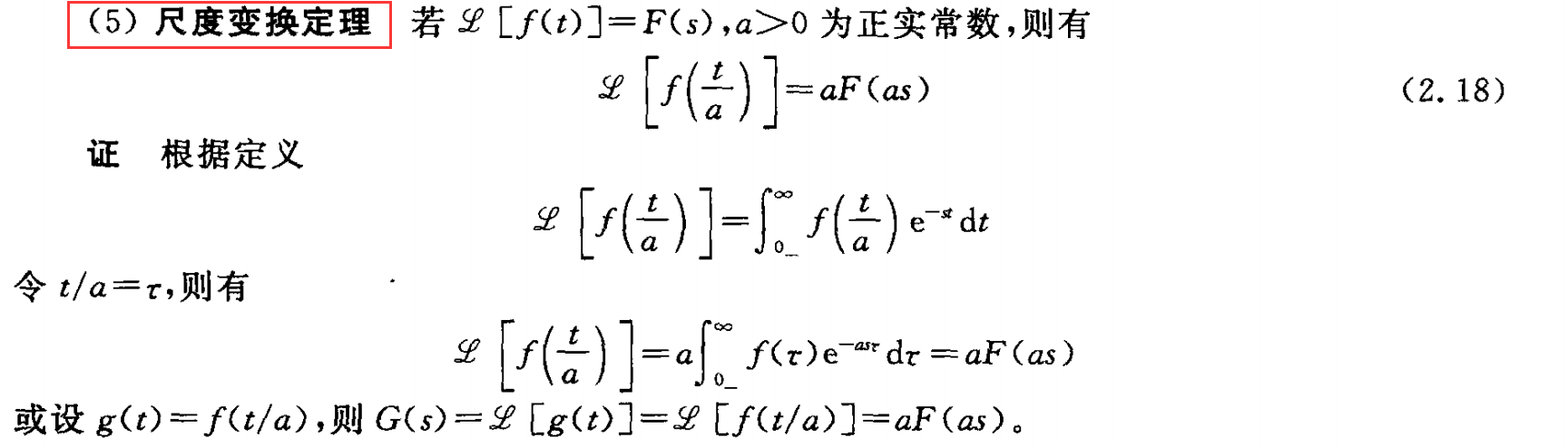
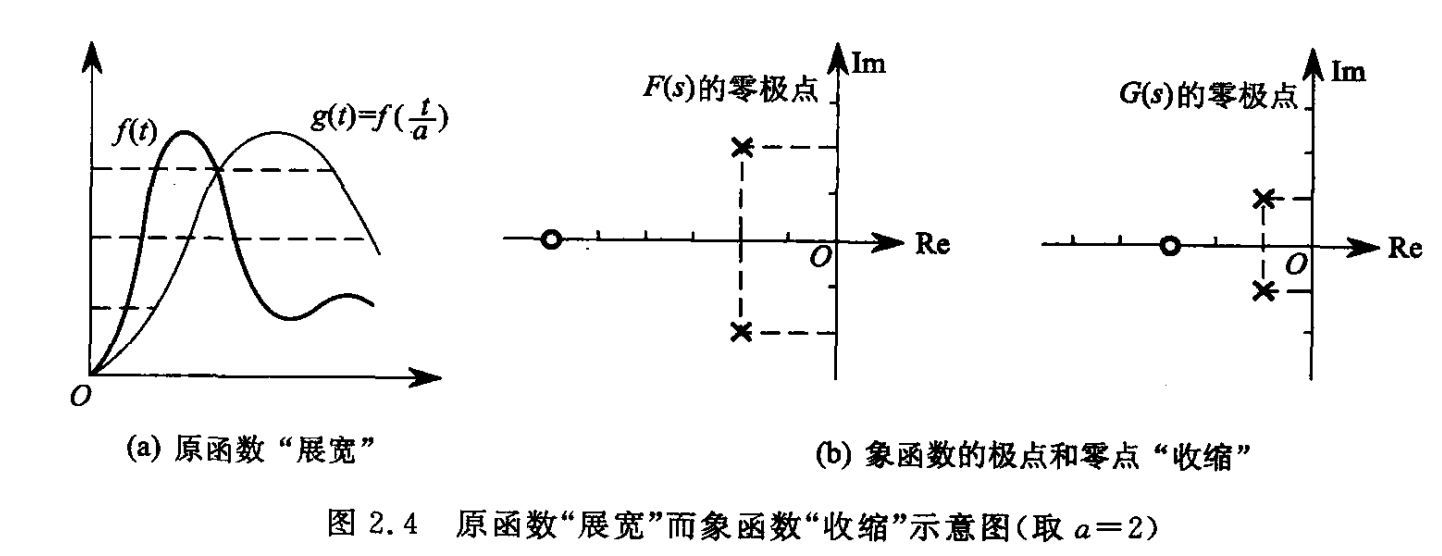
尺度变换定理的涵义:若原函数在时间轴上“展宽”若干倍,则对应的象函数在复平面上按同样比例向原点方向“收缩”;反之亦然,若原函数在时间轴上“收缩”,则对应的象函数就在复平 面上“展宽”。
如图2.4所示,图中取a=2,即原函数在时间轴上“展宽”2倍,并以象函数的零极点为例,展示象函数在复平面上的“收缩"情况。

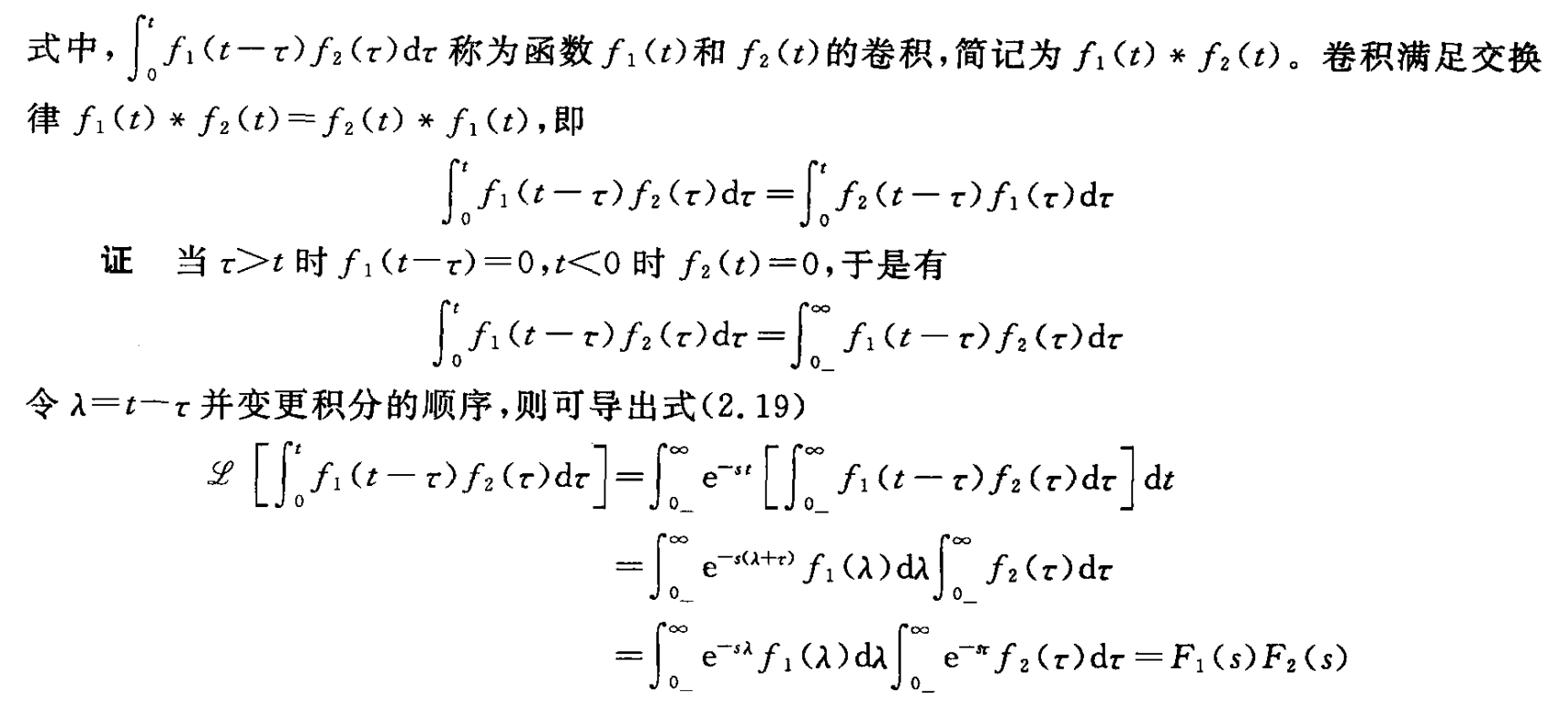
卷积定理表明:两个原函数卷积的拉氏变换等于这两个原函数各自拉氏变换的乘积。
而且此定理可推广至矩阵的情形,设f1(t)和f2(t)都是函数矩阵,且维数满足可相乘的条件,它们的拉氏变换分别为矩阵F1(s)和F2(s),则式(2.19)同样成立。
⑦ 位移性质

或


2.2.3 拉氏反变换
由象函数F(s)求其原函数f(t),可用下列拉氏反变换公式

其中,积分路径是S平面上平行于虚轴的直线σ = c > (
为F(s)的收敛横坐标),式(2.20)右端的积分称为拉氏反演积分。
- 式(2.20)是求拉氏反变换的一般公式,但它是一个复变函数的积分,计算较困难,一般不太使用。
- 控制工程中常遇到的F(s)是有理分式函数:
- 对于简单的象函数,直接地使用拉氏变换对照表(表2.1)和拉氏变换的性质(如表2.2所列)便可求得其原函数;
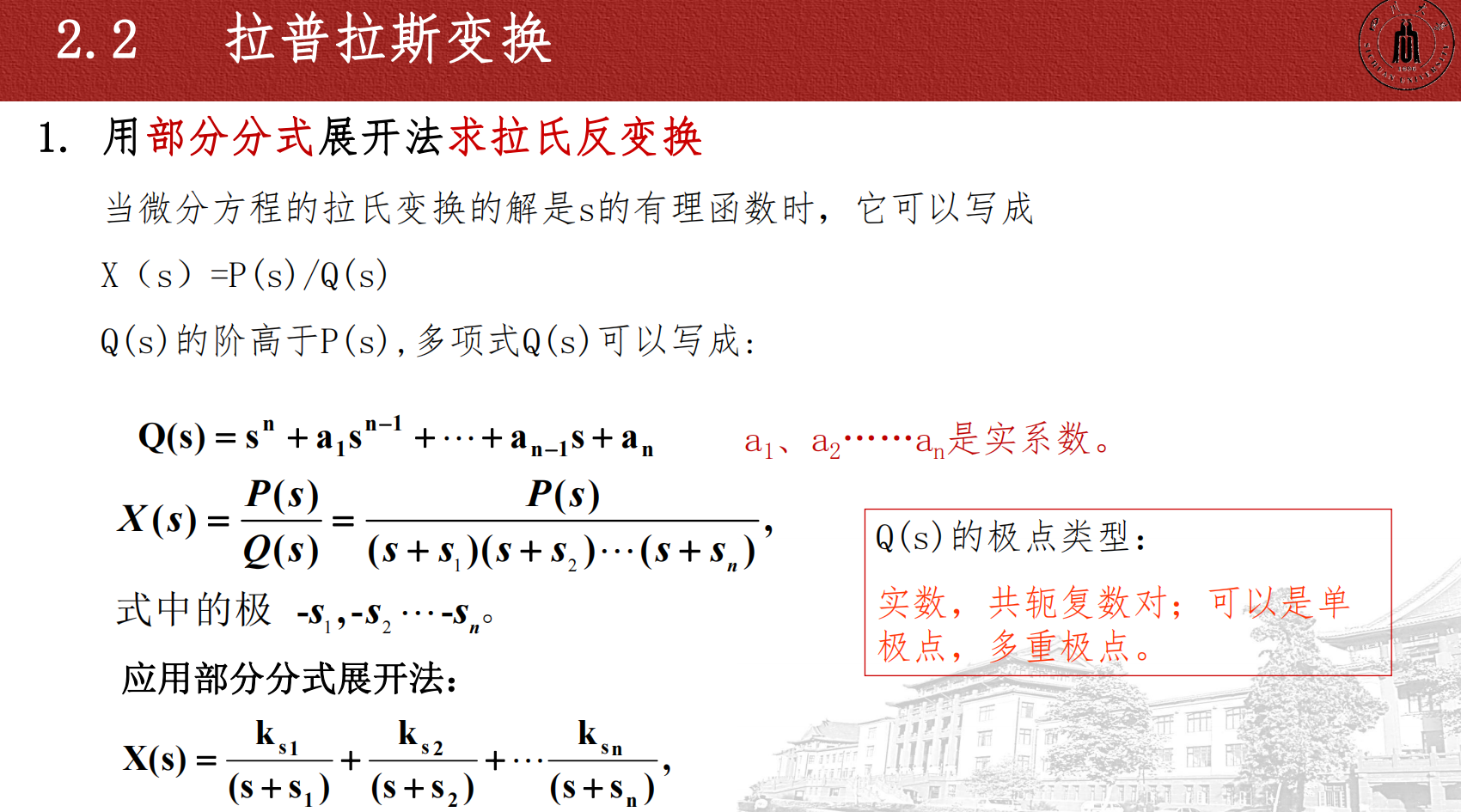
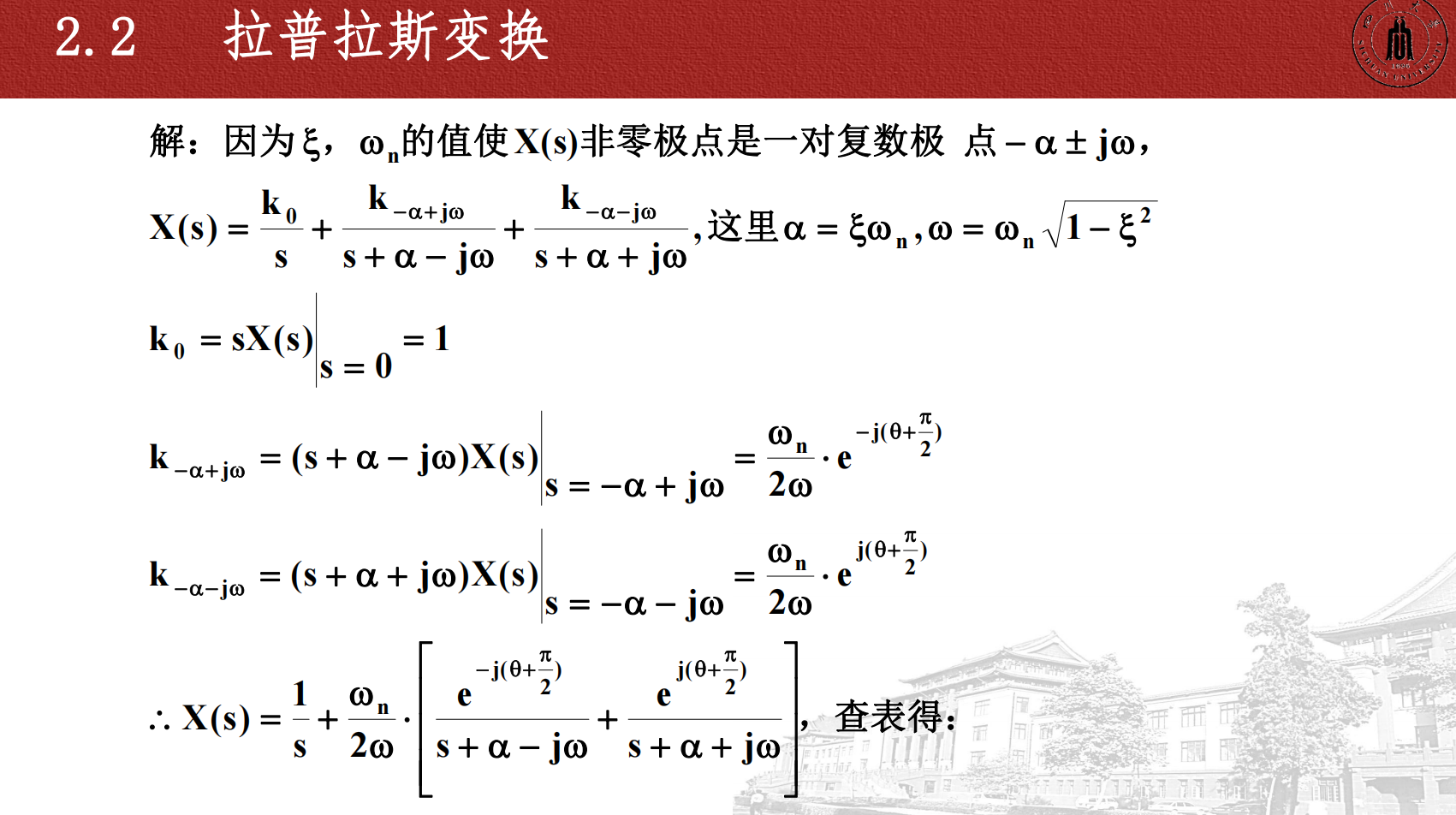
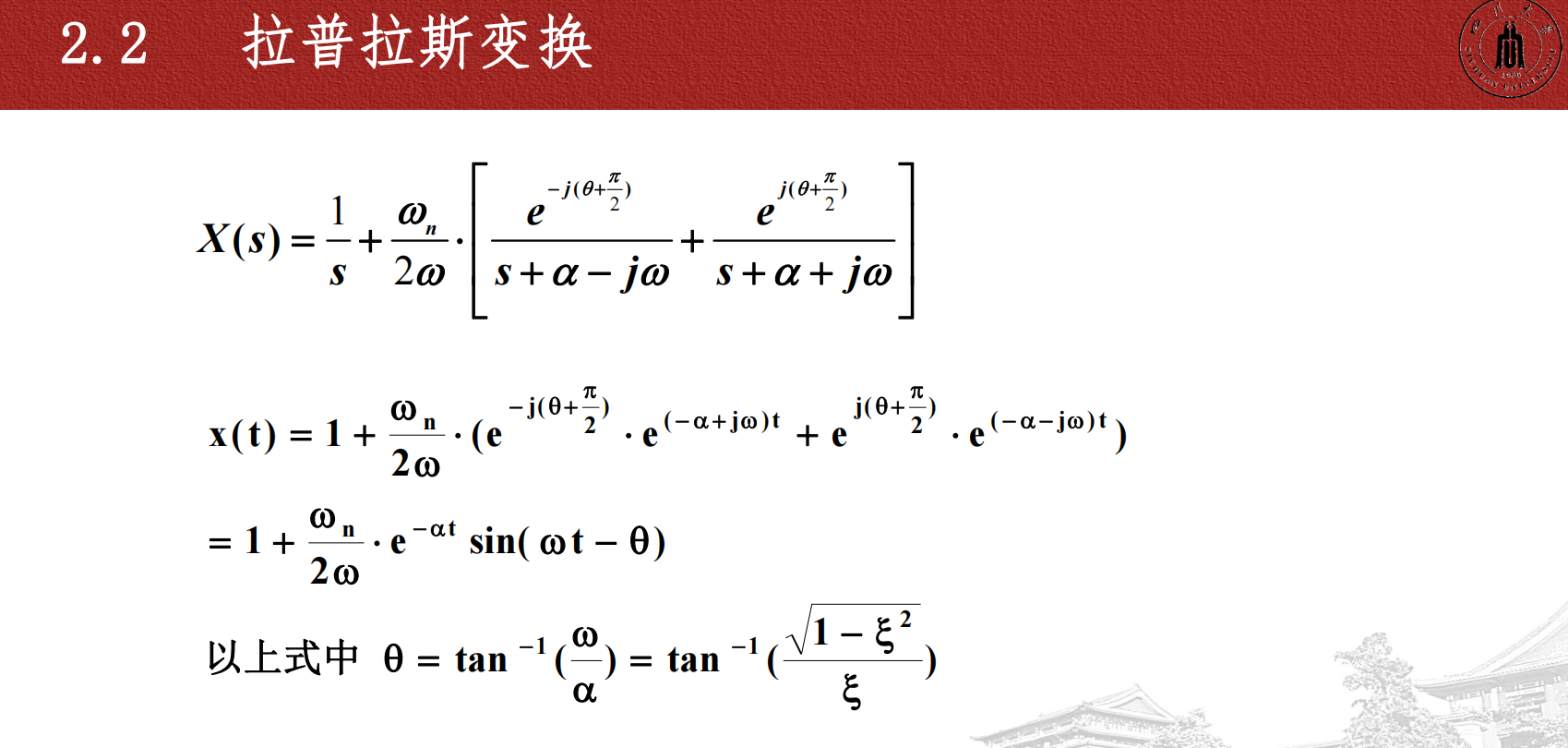
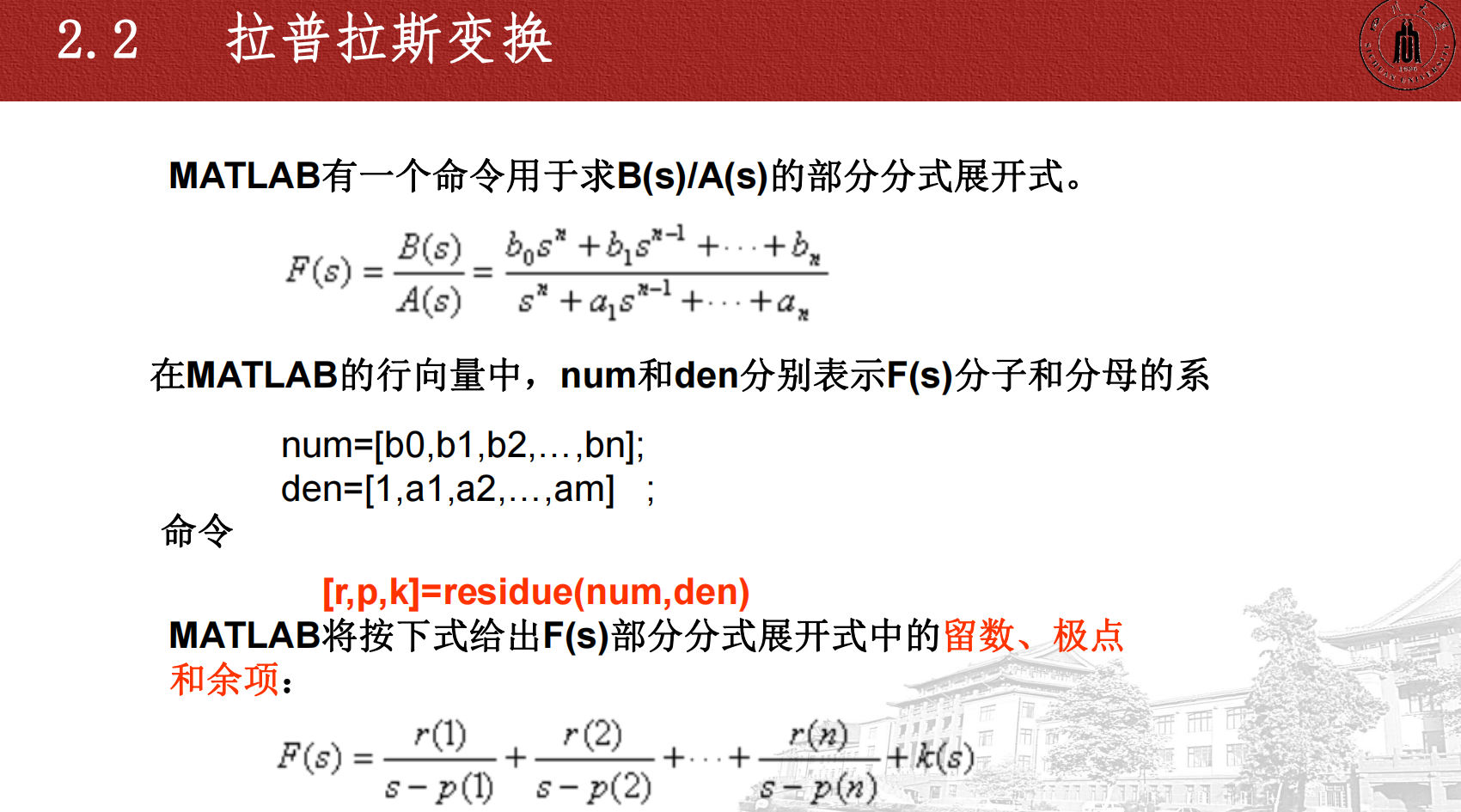
- 对于复杂的象函数,通常采用部分分式展开法求取原函数——即将复杂的象函数F(s)分解成一些简单的基本象函数之和,而这些基本象函数的拉氏反变换通过查拉氏变换表易于求得,根据拉氏变换的线性性质,这些基本象函数的拉氏反变换叠加起来则可求得F(s)的原函数。
x.x 部分分式展开
现就部分分式展开法【也称海维赛(Heaviside)展开定理】简介如下。

- 分母多项式因式分解;
- 部分分式展开;
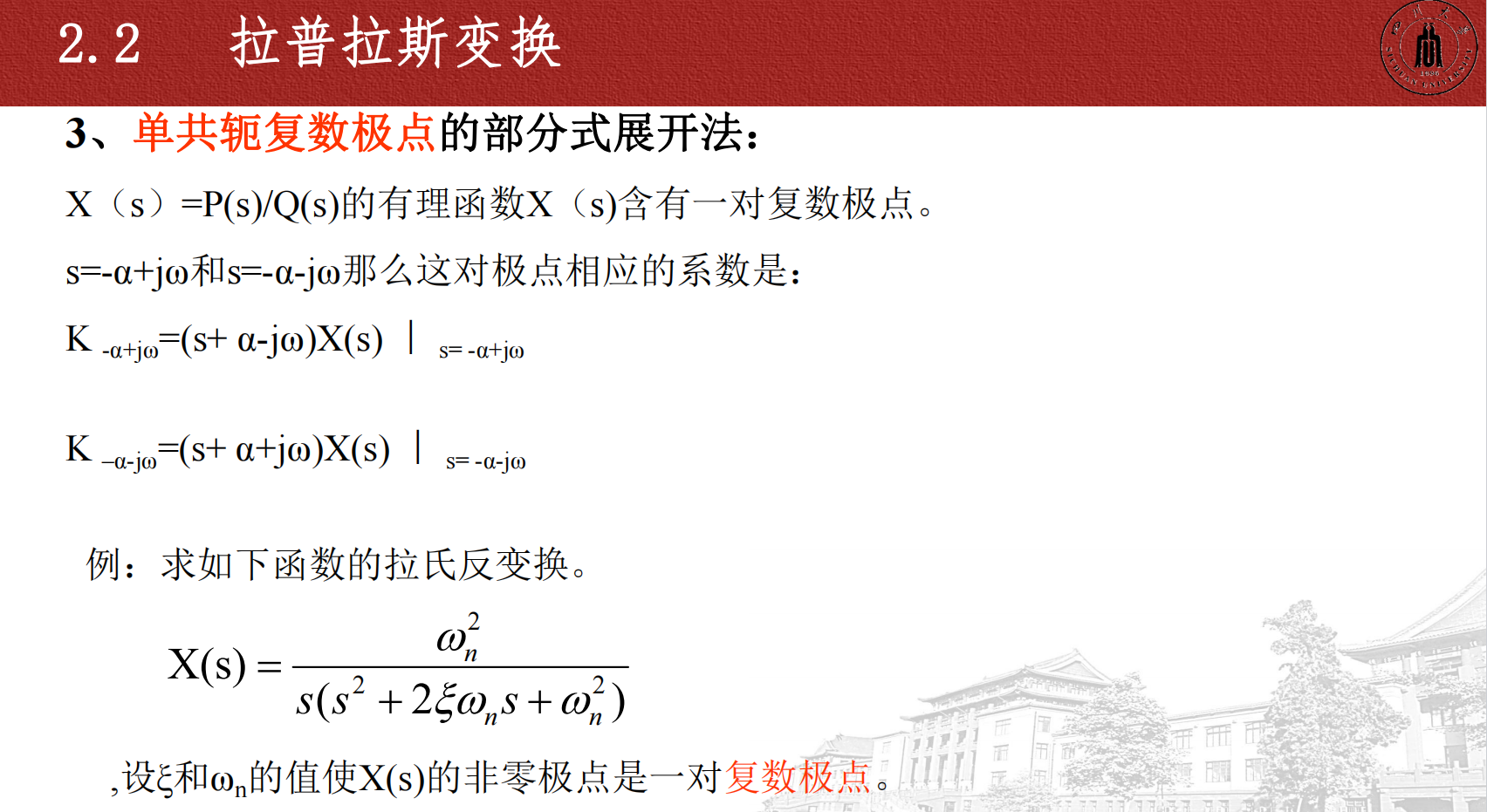
根据F(s)是否为严格真有理分式以及极点分布的情况,部分分式展开有下列几种形式。
(1)严格真有理分式
按极点的阶数,部分分式展开方式有些许不同。
- 幂次在s头上,无论多高阶,都是一阶极点:
- 幂次在表达式头上——括号外面,是几,就是几阶极点。
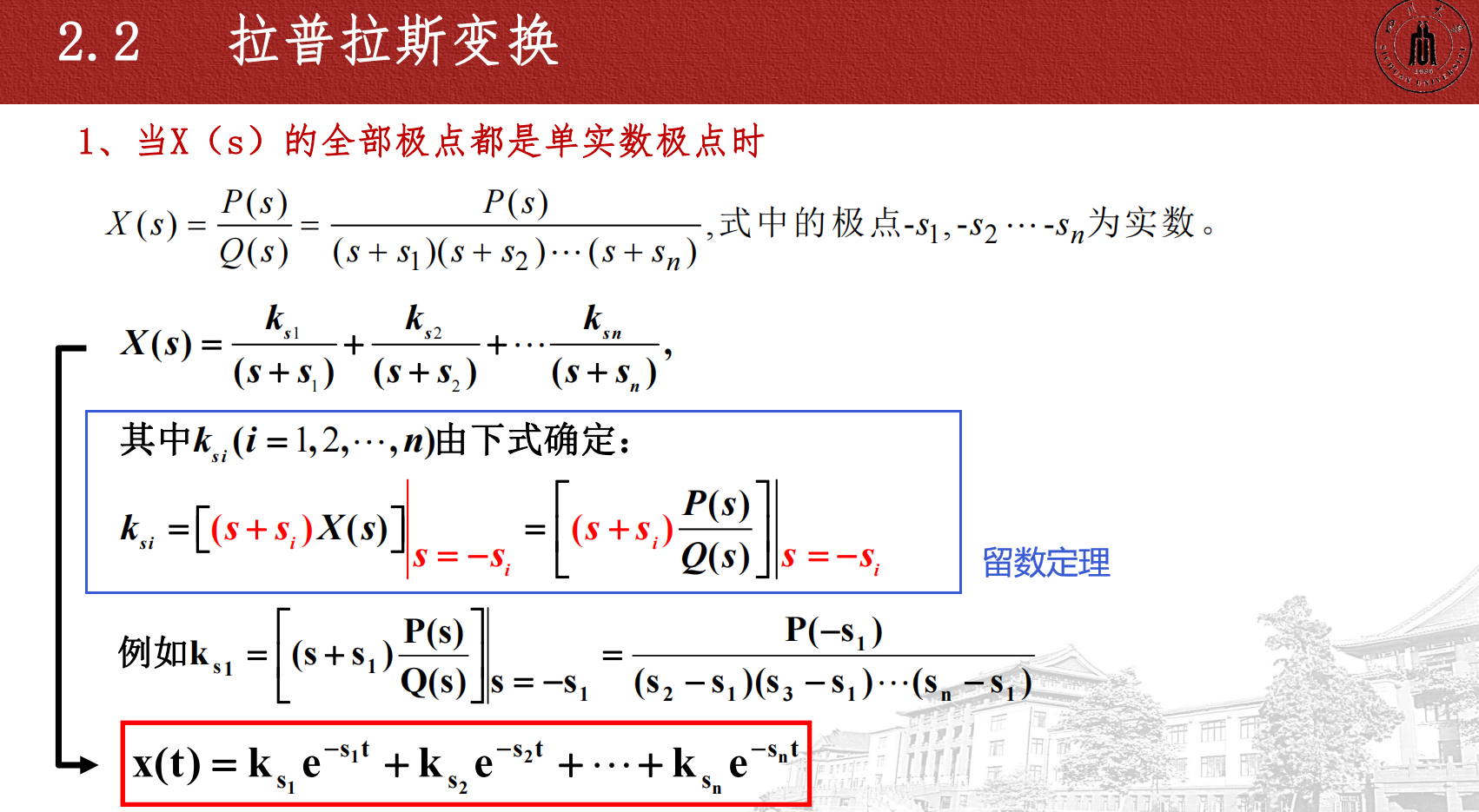
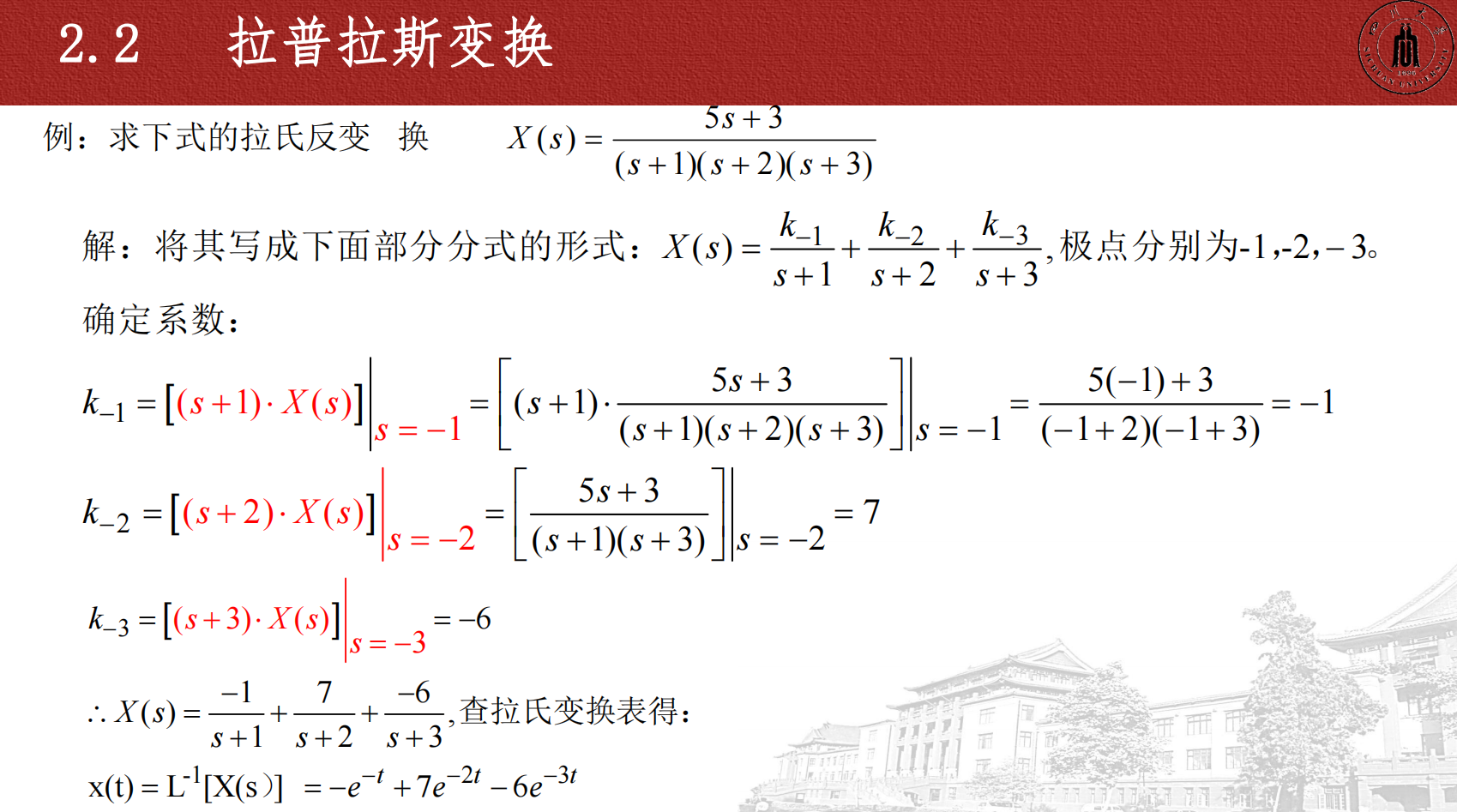
① 全是一阶极点(只有单根)
【直接留数(定理)法】
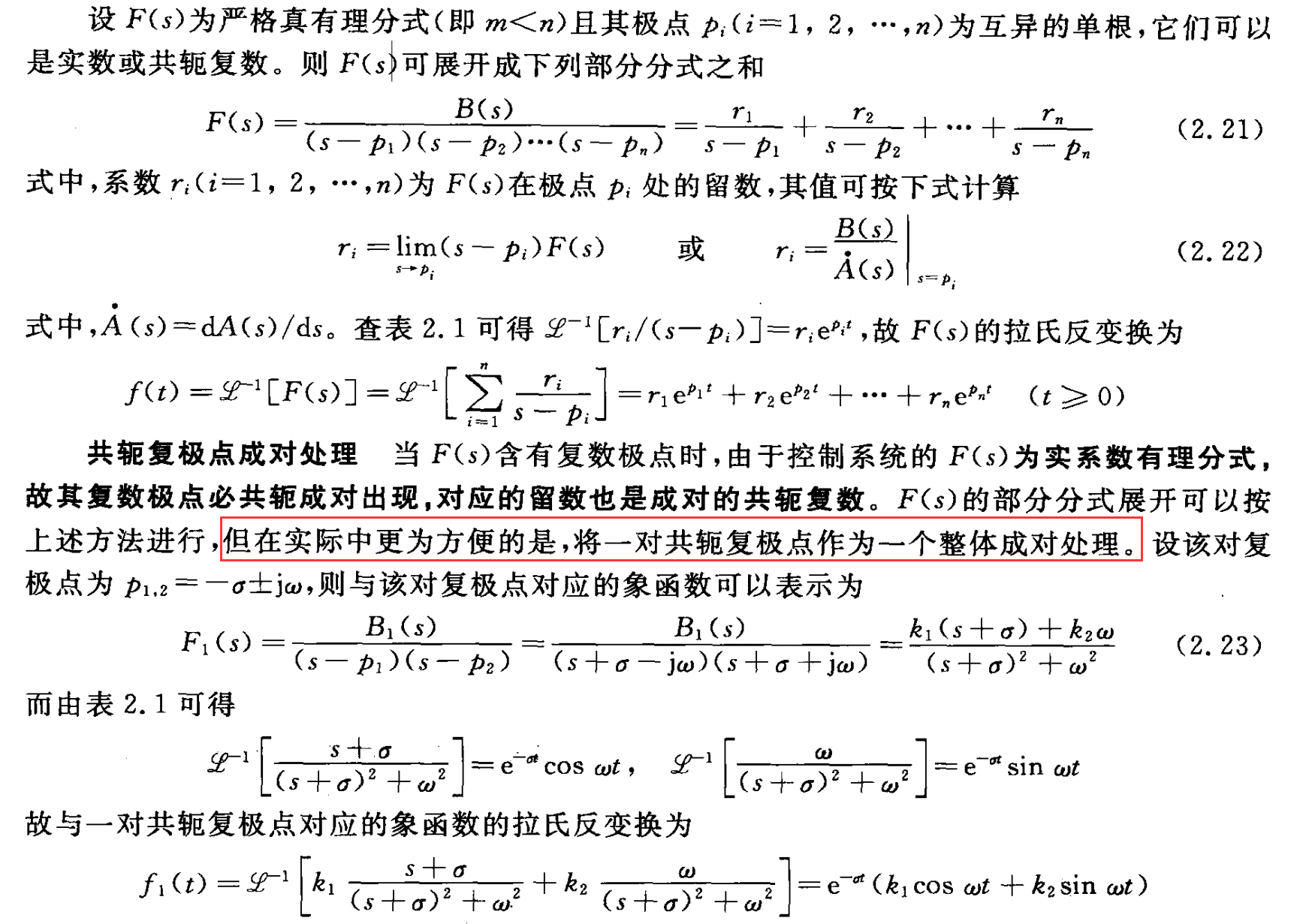
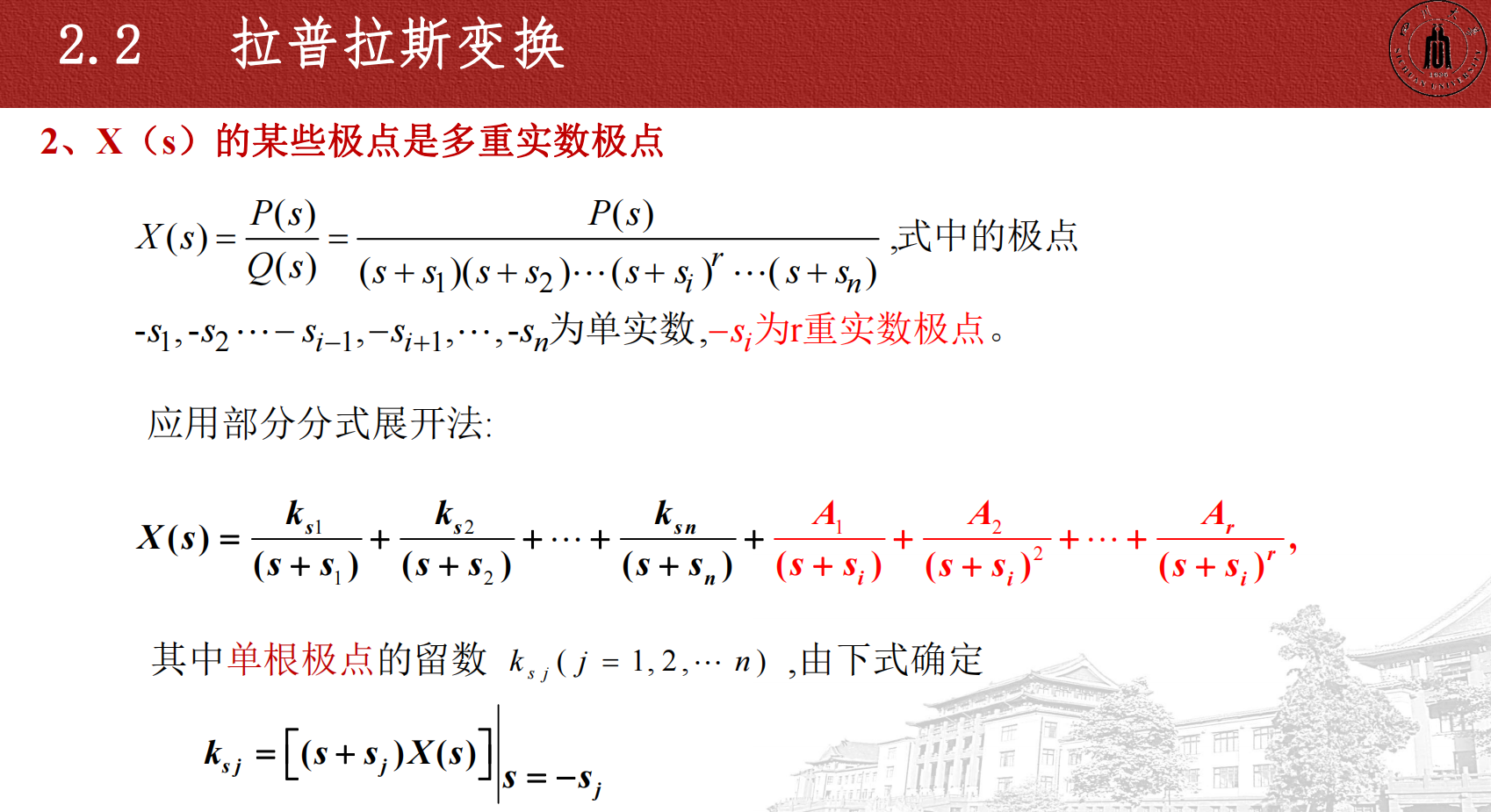
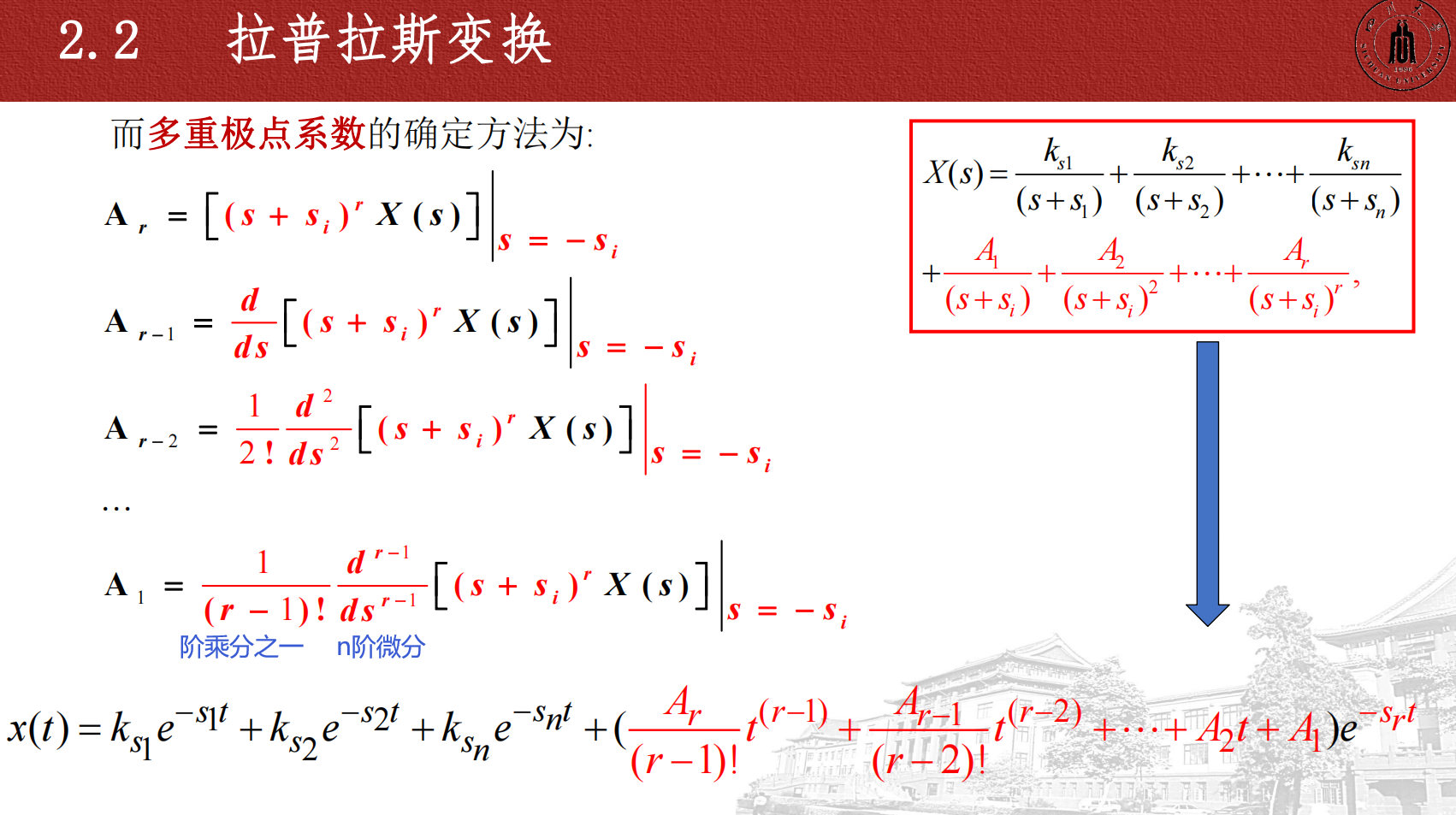
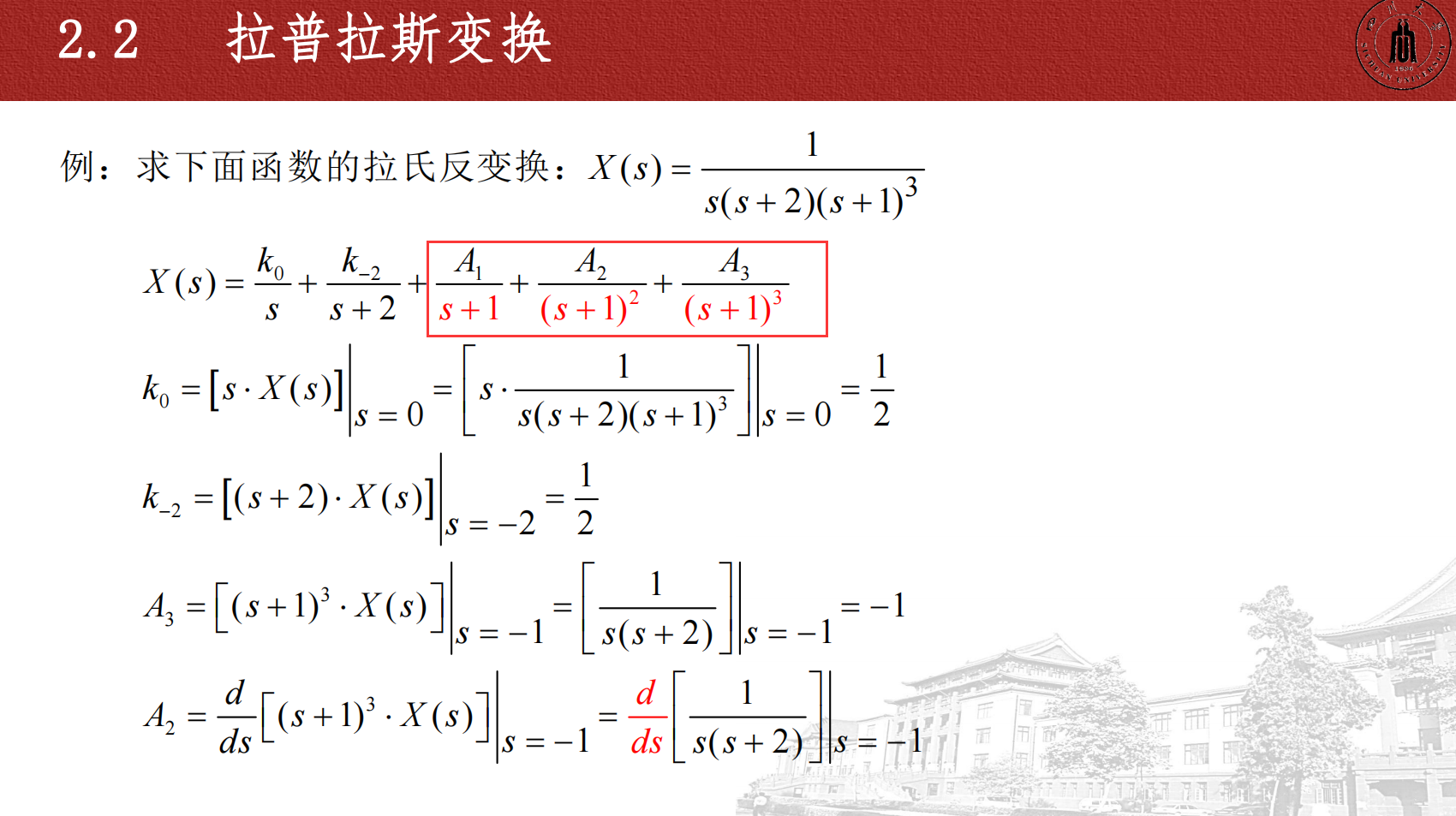
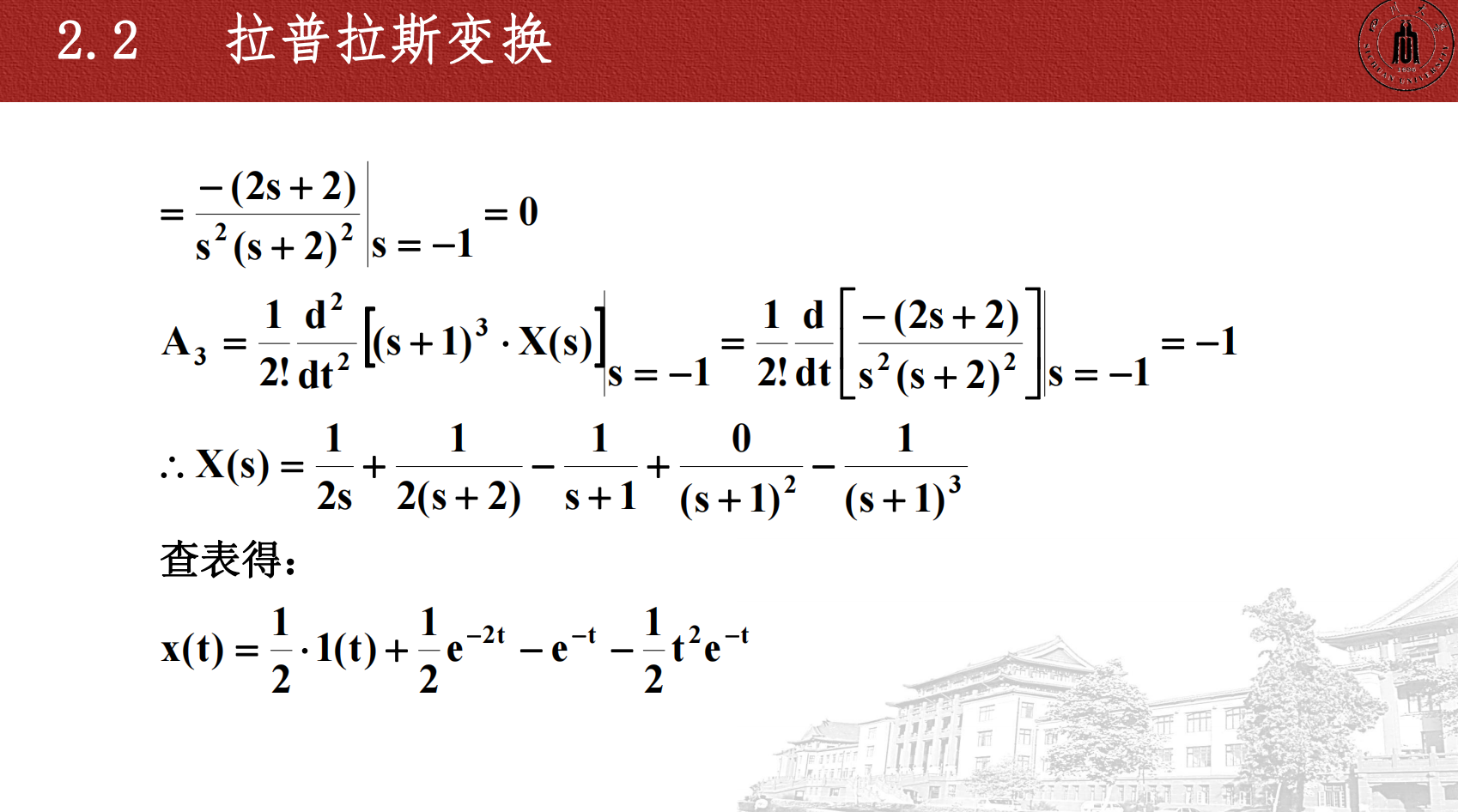
② 有多阶极点(含有重根)
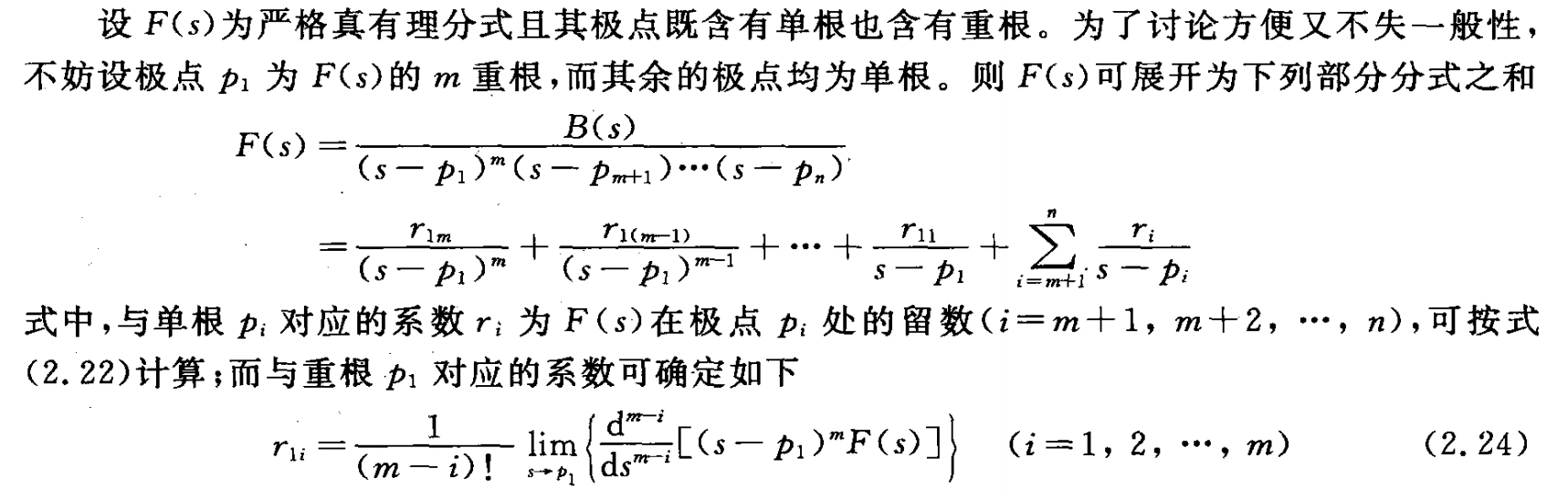
- 阶乘分之一;
- n阶微分;

(2)非严格真有理分式
上述的部分分式展开法只适用于严格真有理分式函数(即m<n),当F(s)为非严格真有理分式(即m>n)时,需作预处理后才能按上述方法进行部分分式展开。
预处理的方法是:用F(s)的分母多项式,去除其分子多项式,从而将F(s)分解成一个商式K(s)和一个严格真有理分式F'(s)之和,即
其中:
- 商式K(s)为s的多项式,由拉氏变换表2.1可知其拉氏反变换为单位脉冲函数δ(t)及其各阶导数的线性组合;
- F(s)为一严格真有理分式,可按上述方法展开并求得其原函数。

一般来说,部分分式展开法只适用于F(s)为有理分式函数的情况;
但若F(s)中含有指数项,它虽不是有理分式,但仍可采用部分分式展开法再结合拉氏变换的延迟定理
![]()
![]() 求得原函数。
求得原函数。