(25.09)使用Livox-mid-360录制数据并运行Fast-lio2命令
前面关于雷达和电脑的配置基本上是参考其他大佬的博文,在此不进行赘述了,感谢:
https://lanxzheng.blog.csdn.net/article/details/132408005?fromshare=blogdetail&sharetype=blogdetail&sharerId=132408005&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.csdn.net/jjjqqq123321/article/details/135159929?fromshare=blogdetail&sharetype=blogdetail&sharerId=135159929&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.csdn.net/2401_87137707/article/details/147025370?fromshare=blogdetail&sharetype=blogdetail&sharerId=147025370&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.csdn.net/zaiiazqqq/article/details/146411901?fromshare=blogdetail&sharetype=blogdetail&sharerId=146411901&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.csdn.net/m0_62948300/article/details/139782954?fromshare=blogdetail&sharetype=blogdetail&sharerId=139782954&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.csdn.net/m0_49384824/article/details/142483862?fromshare=blogdetail&sharetype=blogdetail&sharerId=142483862&sharerefer=PC&sharesource=m0_69023437&sharefrom=from_link
https://blog.51cto.com/u_15699099/7871150
https://hitxjf.github.io/2023/02/12/Mid-360%20%E5%BF%AB%E9%80%9F%E9%85%8D%E7%BD%AE%E6%8C%87%E5%8D%97/
录制
保持一个终端运行雷达驱动
roslaunch livox_ros_driver2 msg_MID360.launchroslaunch ~/桌面/livox_ws/src/livox_ros_driver2/launch_ROS1/msg_MID360.launch新开一个终端
先加载环境(否则找不到工作空间的包):
source ~/桌面/livox_ws/devel/setup.bash确认话题存在:
rostopic list | grep livox应该能看到:
/livox/lidar (livox_ros_driver2/CustomMsg)开始录制:
rosbag record /livox/lidar会在当前目录生成一个 .bag 文件(名字带时间戳)。
如果想指定保存位置和文件名,比如保存到桌面:
rosbag record -O ~/桌面/mid360_data.bag /livox/lidarTIPS:
如果你还想录 IMU 数据,可以同时加上 /livox/imu:
rosbag record -O ~/桌面/mid360_data.bag /livox/lidar /livox/imu停止录制:
在录制终端里 Ctrl + C。
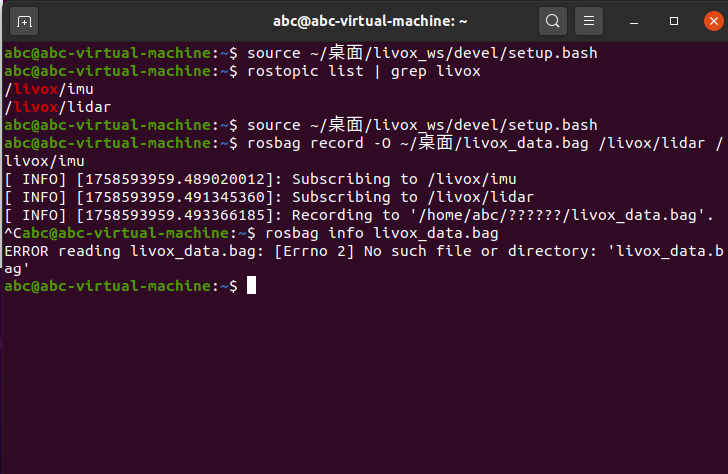
abc@abc-virtual-machine:~$ rostopic list | grep livox
/livox/imu
/livox/lidar
若出现上述信息代表驱动已经正确跑起来了,现在 /livox/lidar(点云,CustomMsg 格式)和 /livox/imu(IMU 数据)都在发布。
小总结:
如果你只是要录点云
新开一个终端,记得先加载工作空间环境:
roslaunch ~/桌面/livox_ws/src/livox_ros_driver2/launch_ROS1/msg_MID360.launch如果你要录点云 + IMU(Fast-LIO2 推荐)
source ~/桌面/livox_ws/devel/setup.bash rosbag record -O ~/桌面/livox_data.bag /livox/lidar /livox/imu这样录制的 .bag 就能直接给 Fast-LIO2 使用。
注意事项:
文件默认保存在你运行命令时所在的目录(用 -O 可以指定保存位置和文件名)。
.bag 文件可能会很大,建议存到磁盘空间充足的地方。
运行
rosbag play <路径下的包名>想知道.bag文件的具体信息:
rosbag info <包名>查看PCD文件
pcl_viewer <pcd的文件名>