智能交通拥堵检测系统详解(附视频+代码资源)
项目概述
本项目是一个基于人工智能的智能交通系统,旨在对城市路网进行实时监控与交通拥堵评估。该系统能够同时处理多路视频流,运用深度学习技术实现车辆检测与跟踪,并通过直观的Web界面展示关键的交通指标,为交通管理及出行决策提供数据支持。
https://github.com/vietanhlee/Smart-Transportation-System?tab=readme-ov-file
是越南的一个算法工程师写的,所以代码中全是越南语,分享的代码已经调成中文。
资源获取方式:https://mbd.pub/o/bread/YZWXmppxZA==
技术架构
项目整体结构
项目采用清晰的多层架构设计,具体结构如下:
Smart-Transportation-System-main/
├── app/ # 后端代码目录
├── src/ # 前端代码目录
├── Dockerfile # Docker配置文件(位于根目录)
├── docker-compose.yaml # Docker Compose配置
├── README.md # 项目说明文档
├── package.json # 前端依赖配置
├── tsconfig.json # TypeScript配置
└── vite.config.ts # Vite构建配置
后端目录结构 (app/)
app/
├── api/ # API接口层
│ ├── chat_api.py # 聊天机器人API
│ ├── state.py # 应用状态管理
│ └── veheicles_frames_api.py # 车辆和视频帧API
├── services/ # 核心服务实现
│ ├── AnalyzeOnRoadBase.py # 视频分析基础类
│ ├── AnalyzeOnRoad.py # 视频分析实现类
│ ├── AnalyzeOnRoadForMultiProcessing.py # 多进程视频分析
│ ├── ChatBot.py # 聊天机器人实现
│ ├── utils.py # 工具函数
│ └── video_test/ # 极狐视频目录
├── schemas/ # 数据模型定义
│ └── ChatRequest.py # 聊天请求模型
├── config.py # 配置文件
├── main.py # 后端主入口
└── requirements_*.txt # Python依赖文件
前端目录结构 (src/)
src/
├── components/ # 前端组件
│ ├── TrafficDashboard.tsx # 主仪表盘组件
│ ├── VideoMonitor.tsx # 视频监控组件
│ ├── TrafficAnalytics.tsx # 交通分析组件
│ ├── ChatInterface.tsx # 聊天界面组件
│ └── VideoModal.tsx # 视频模态框组件
├── hooks/ # React hooks
├── lib/ # 工具函数库
├── App.tsx # 前端主应用组件
└── main.tsx # 前端入口文件
核心组件说明
后端核心文件
- main.py: FastAPI应用入口,负责初始化分析器和API服务
- AnalyzeOnRoadForMultiProcessing.py: 多进程视频处理管理器,协调并行任务
- AnalyzeOnRoadBase.py: 封装视频处理与车辆分析的核心逻辑
- ChatBot.py: 基于Google Gemini API实现的智能聊天机器人
- veheicles_frames_api.py: 提供车辆数据与视频帧的API端点
前端核心文件
- App.tsx: 前端应用主组件,整合所有功能模块
- TrafficDashboard.tsx: 交通仪表盘,提供监控、分析和聊天功能
- VideoMonitor.tsx: 实时视频监控界面
- TrafficAnalytics.tsx: 交通数据分析与可视化组件
- ChatInterface.tsx: 用户与聊天机器人交互界面
系统架构特点
后端架构
- 并行处理核心: 采用多进程技术并行处理多个视频流,显著提升效率
- AI模型集成: YOLO(目标检测) + Bytetrack(目标跟踪)强强联合
- Web框架: 基于FastAPI提供高效RESTful API接口
- 智能交互: 聊天机器人整合Google Gemini API与Langchain平台
前端架构
- 开发框架: ReactJS构建用户界面
- 组件设计: 使用高度定制的UI组件库
- 实时可视化: 动态展示视频画面与交通数据
- 响应式布局: 支持全屏查看与多设备适配
核心功能模块
1. 视频处理与交通分析
- 多进程处理机制: 每个视频流分配独立处理进程,最大化资源利用
- 车辆检测与跟踪: YOLO模型负责车辆检测,Bytetrack算法实现持续跟踪
- 交通指标计算: 实时统计汽车/摩托车数量,计算平均速度等关键指标
- 进程间通信: 使用Manager()实现安全高效的数据共享
2. API接口层
系统提供3个核心API端点:
/frames: 提供各道路的实时视频帧(每200毫秒更新一次)/veheicles: 返回各道路的车辆统计数据(每秒更新一次)/chat: 处理用户交通查询请求的智能聊天接口
3. 前端可视化
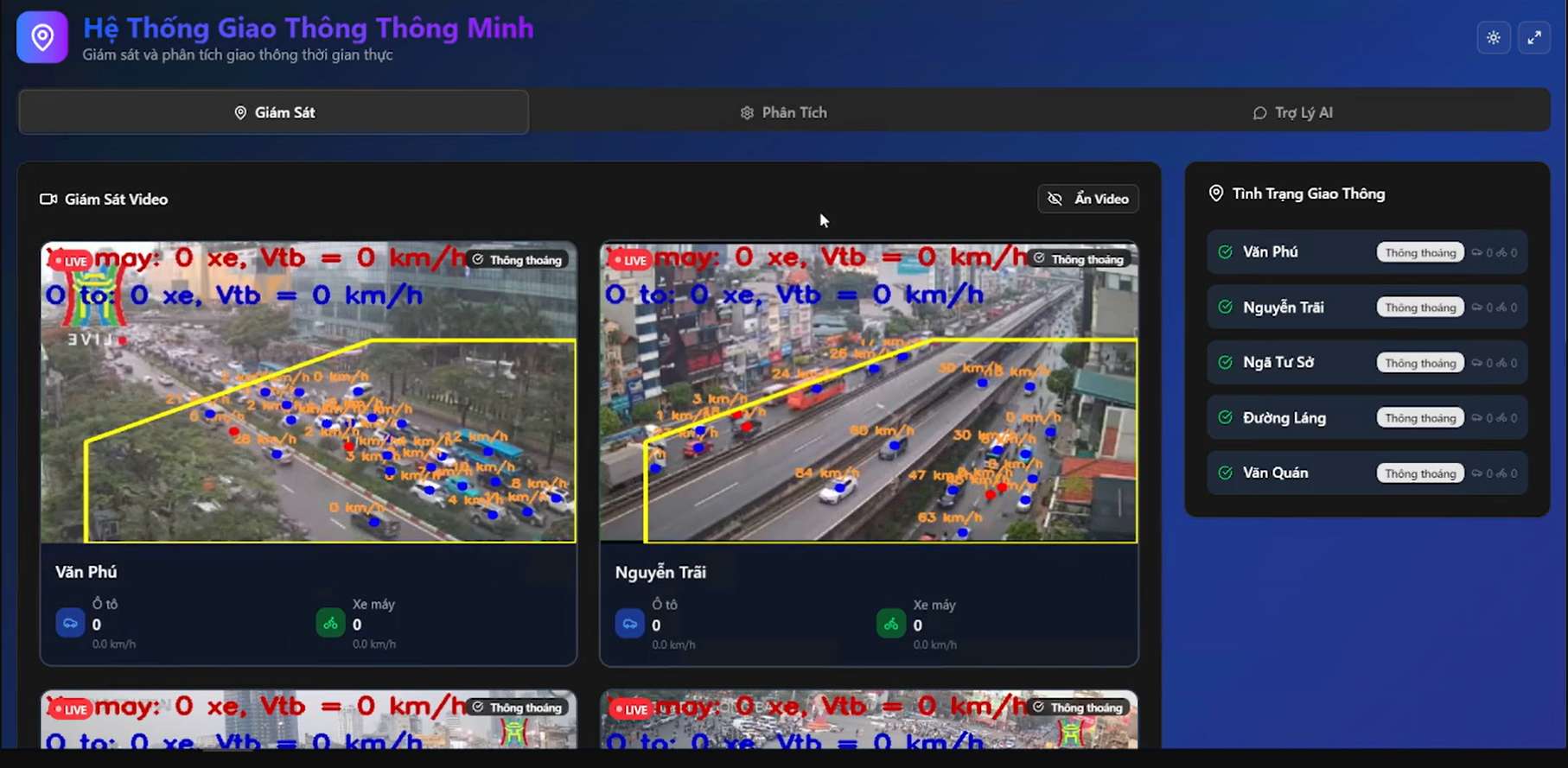
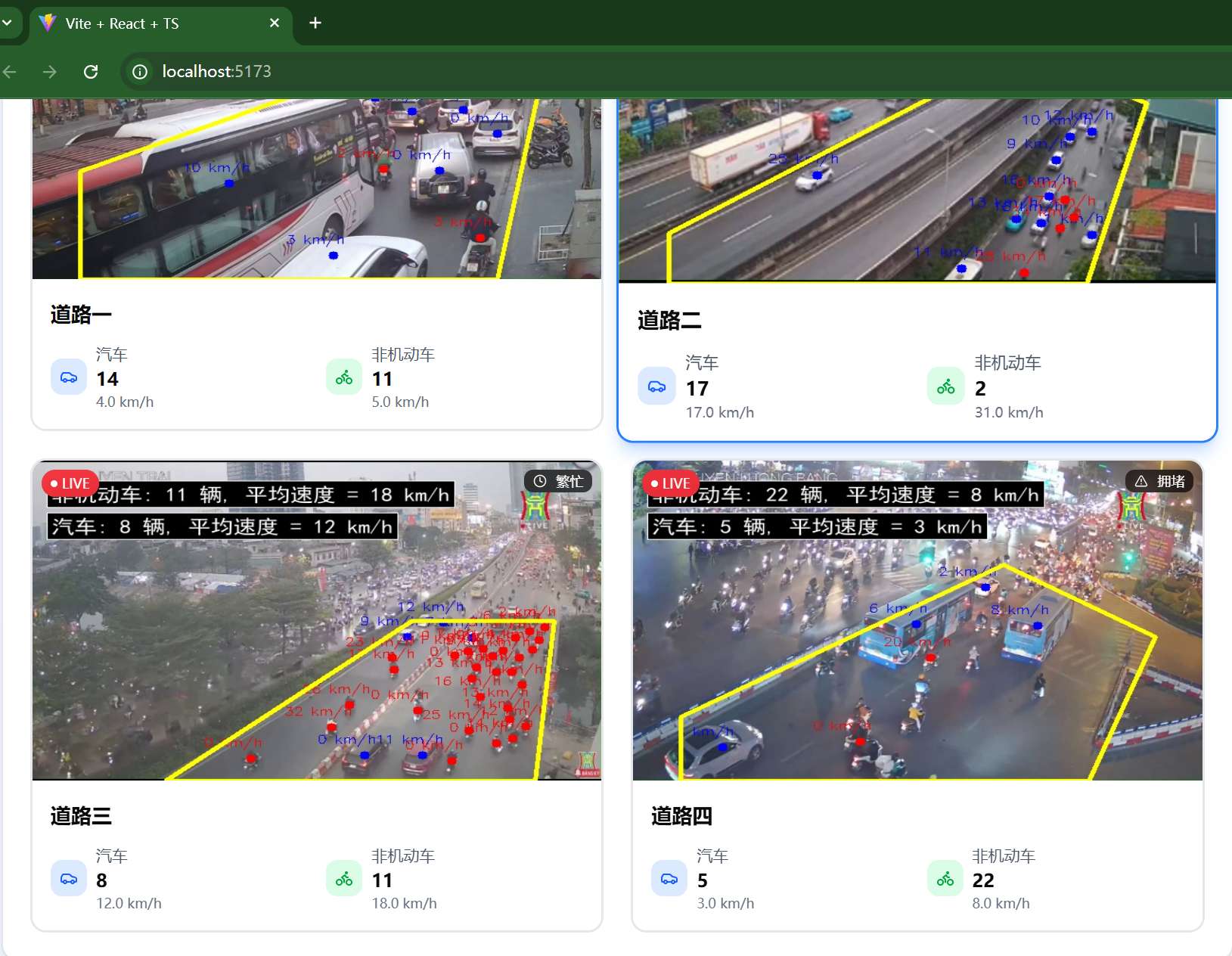
- 实时监控界面: 同步显示多路视频流与交通状态信息
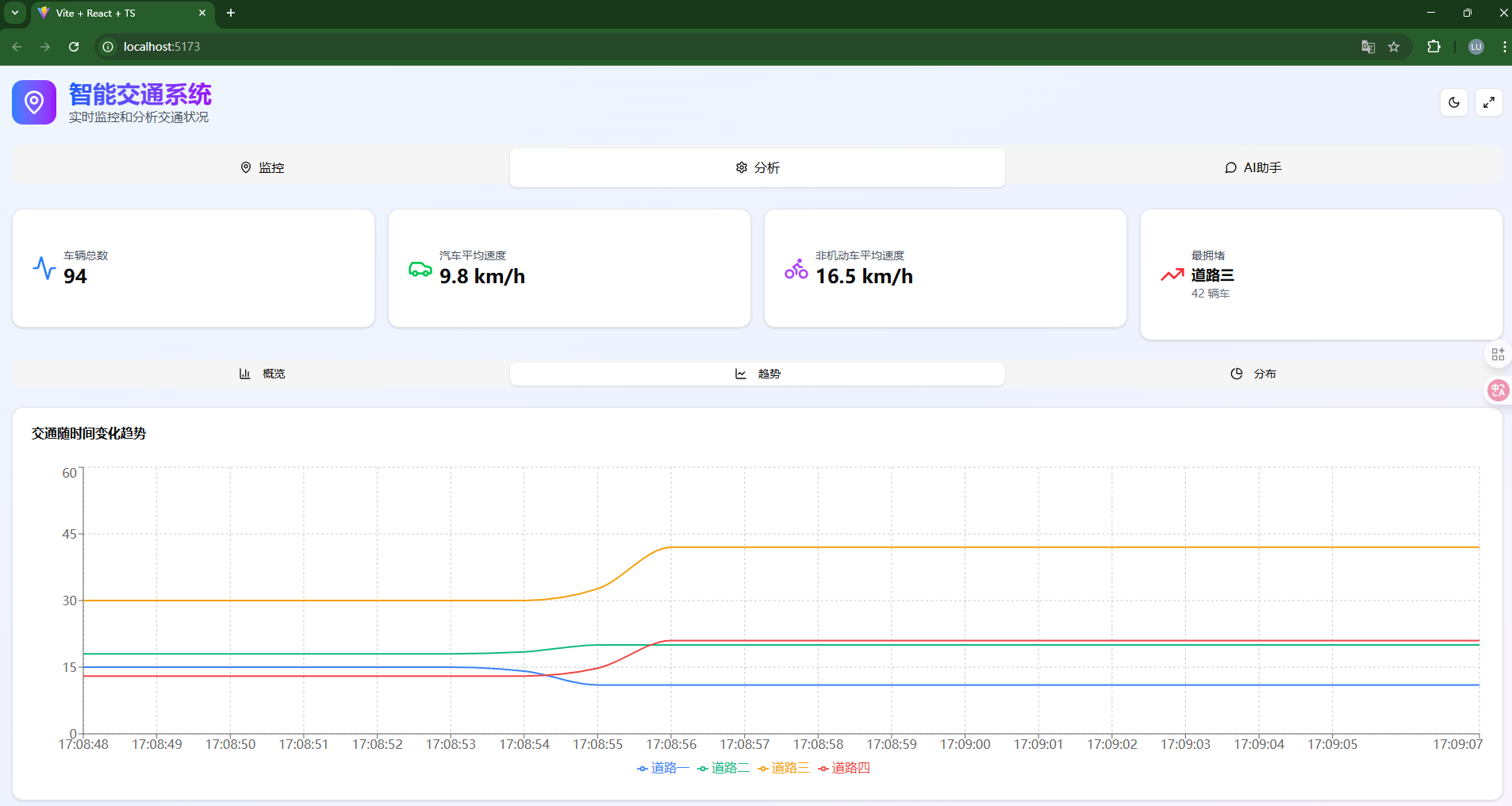
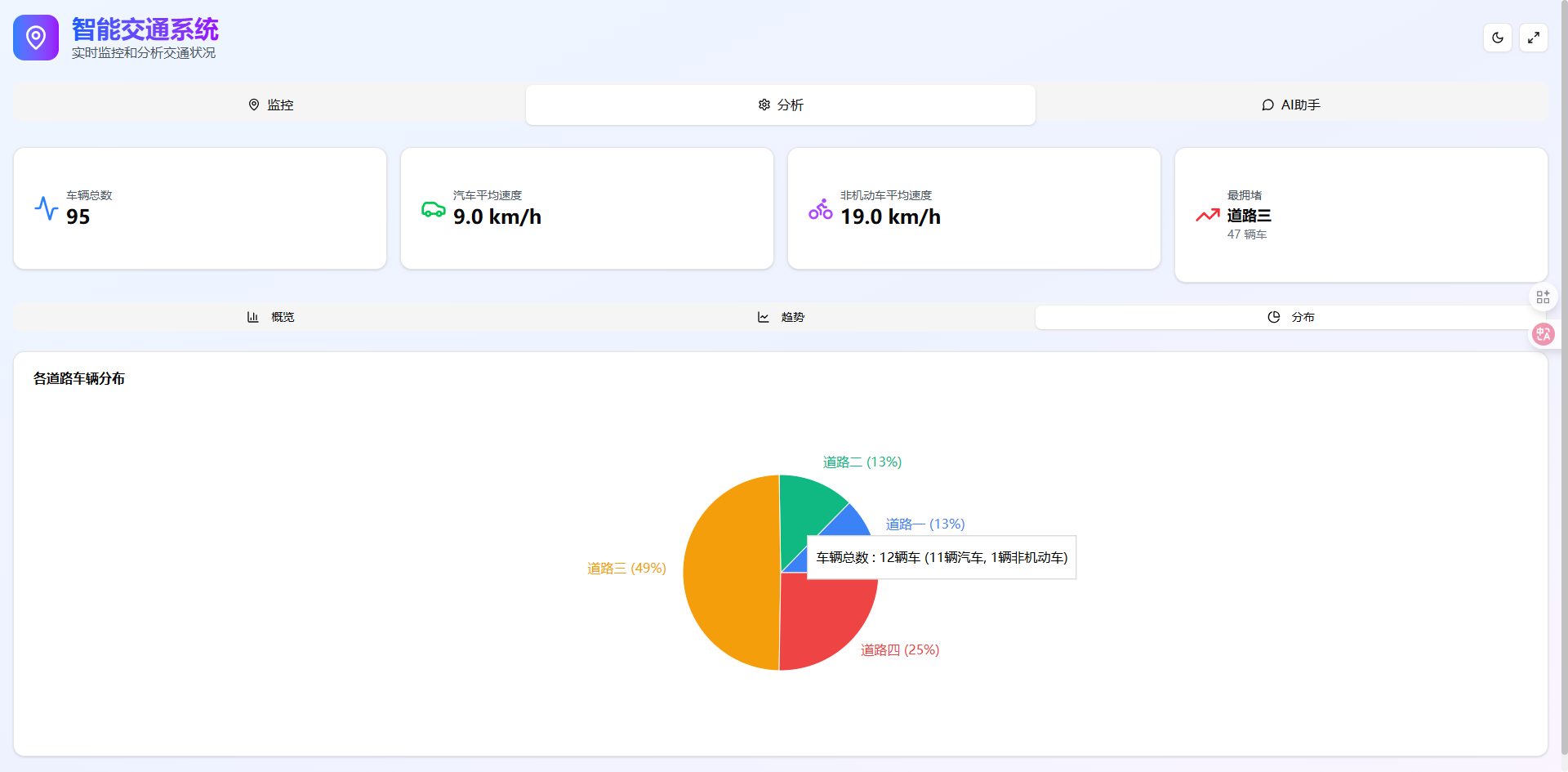
- 数据分析面板: 动态展示交通流量与速度统计图表
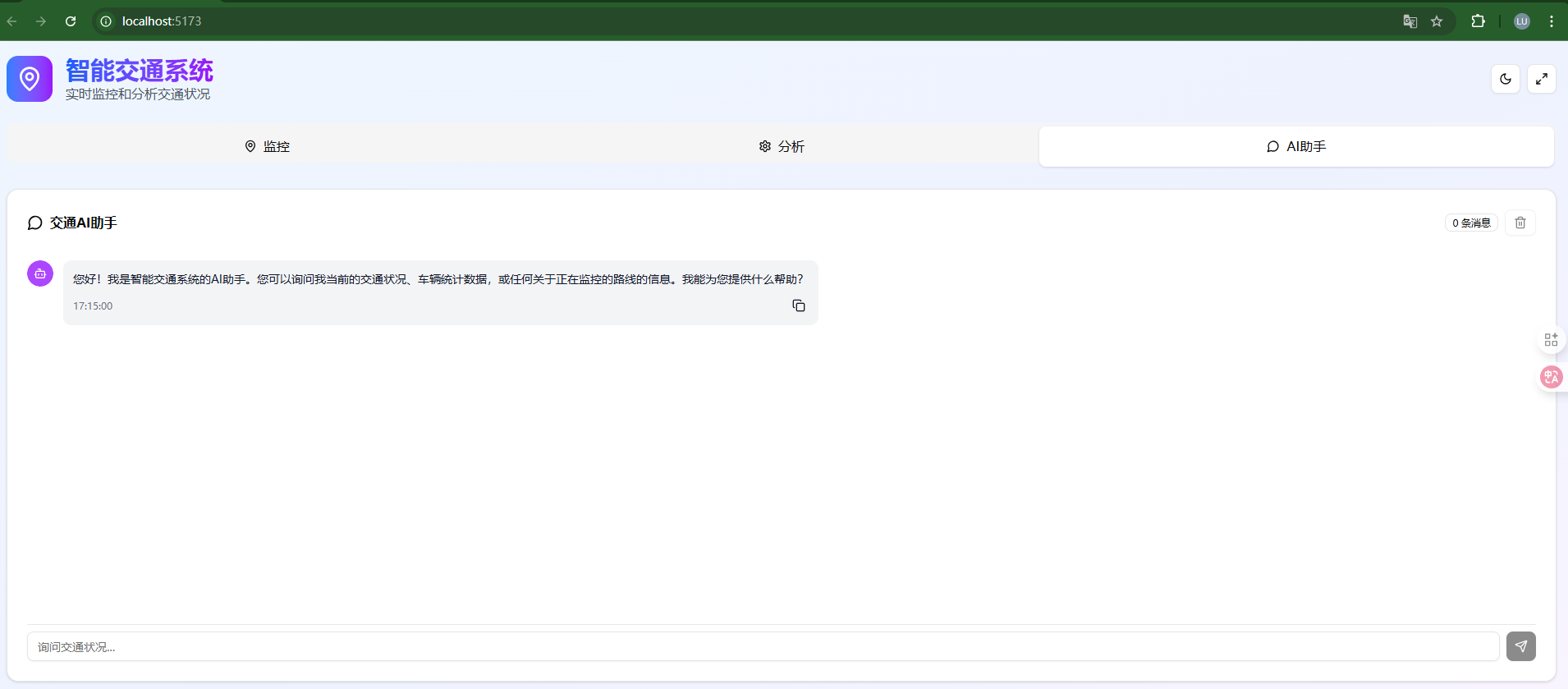
- AI助手功能: 支持自然语言交互查询实时交通状况
- 自适应设计: 提供良好的多屏幕适配体验
系统工作流程
- 系统启动时,通过多进程并行初始化多个视频分析器
- 每个分析器独立处理指定视频流,执行车辆检测与交通指标计算
- FastAPI服务提供RESTful接口,为前端提供实时数据支持
- 前端定时获取数据(视频帧200ms/次,车辆数据1s/次)
- 用户可通过聊天界面查询特定道路的实时交通状况
技术特点
- 高效并行处理: 多进程技术确保多路视频流同时处理无压力
- 实时性能优化: 精细化的数据更新策略平衡性能与实时性
- AI技术驱动: 深度融合计算机视觉与自然语言处理技术
- 用户体验优先: 提供直观的可视化界面与自然的交互方式
环境配置与项目运行指南
第一歩查看readme.md文件配置环境
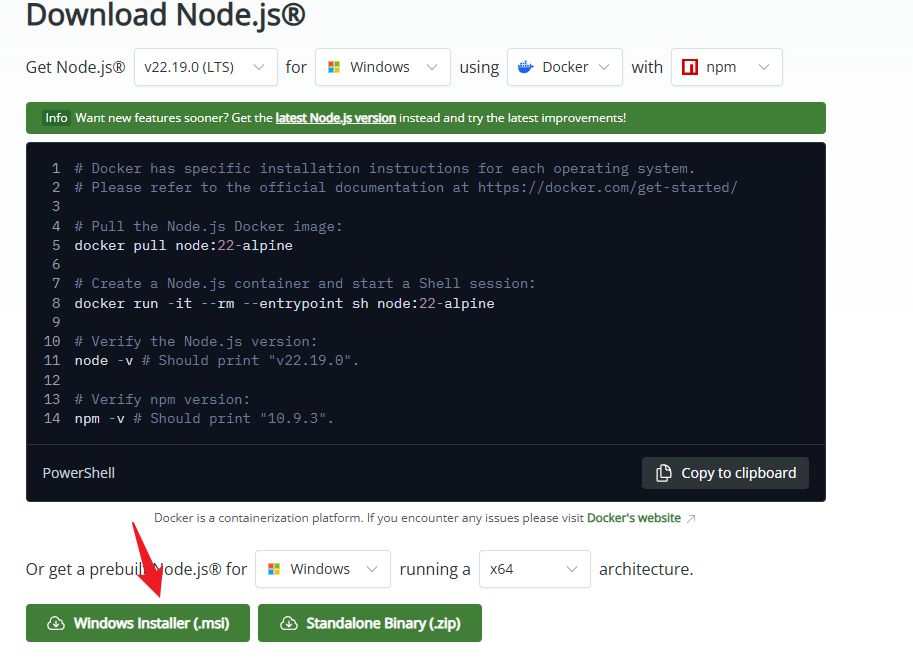
需要Nood.js环境,我没安装,于是下载安装,在Windows系统上安装Node.js的详细步骤:
下载Node.js安装程序
访问Node.js官方网站(https://nodejs.org/en/download/),根据您的Windows系统版本(32位或64位)选择下载合适的.msi安装包。
运行安装程序
- 双击下载好的.msi文件,启动安装向导
- 点击"Next",接受许可协议
- 选择安装目录(建议安装在系统盘C盘)
- 保持默认组件选项(包含npm包管理器),点击"Next"
- 点击"Install"开始安装
- 安装完成后点击"Finish"
步骤3:验证安装
- 按下Win + R快捷键,输入cmd,打开命令提示符
- 分别输入以下命令验证Node.js和npm是否安装成功:
node -v
npm -v
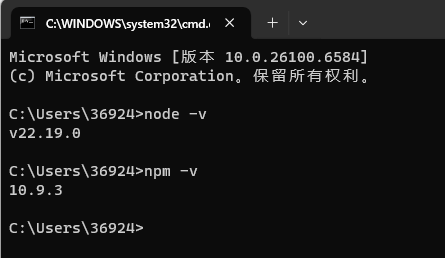
如果显示版本号,则表示安装成功
然后可以新建python虚拟环境了
conda create -n Smart-Transportation-System python=3.11
我是用cpu运行的
所以安装包采用pip install -r requirements_cpu.txt命令

然后配置前端
运行命令 npm install
运行完后会生成一个文件夹
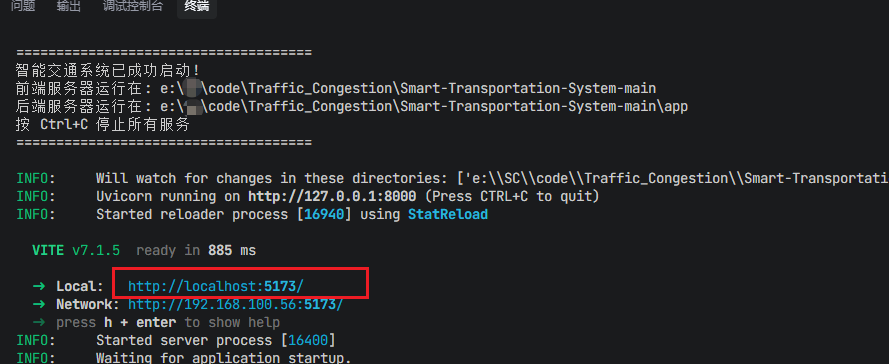
安装完成后直接运行我创建的run.py即可启动前后端服务
运行成功后,按住Ctrl点击链接即可打开运行。
视频原github是放在谷歌网盘里的,这里我直接下载下来并且将名称修改为中文放在了这个文件夹下
项目还有一些小问题我也一并修改了。改了之后的效果如下


资源获取
完整的项目资源已经打包并上传至网盘,方便用户快速获取和使用。
获取方式:https://mbd.pub/o/bread/YZWXmppxZA==

通过本系统,开发者可以快速构建一个功能完善的智能交通监控平台,实现对城市交通状况的实时感知、分析与可视化,为智慧城市建设提供有力技术支撑。