伺服上位机展示
文章目录
- 功能详情
- 首页
- 通讯连接
- 电机参数
- 电流环
- 速度环
- 位置环
- 速度JOG
- 位置JOG(仿汇川)
- 转矩JOG
功能详情
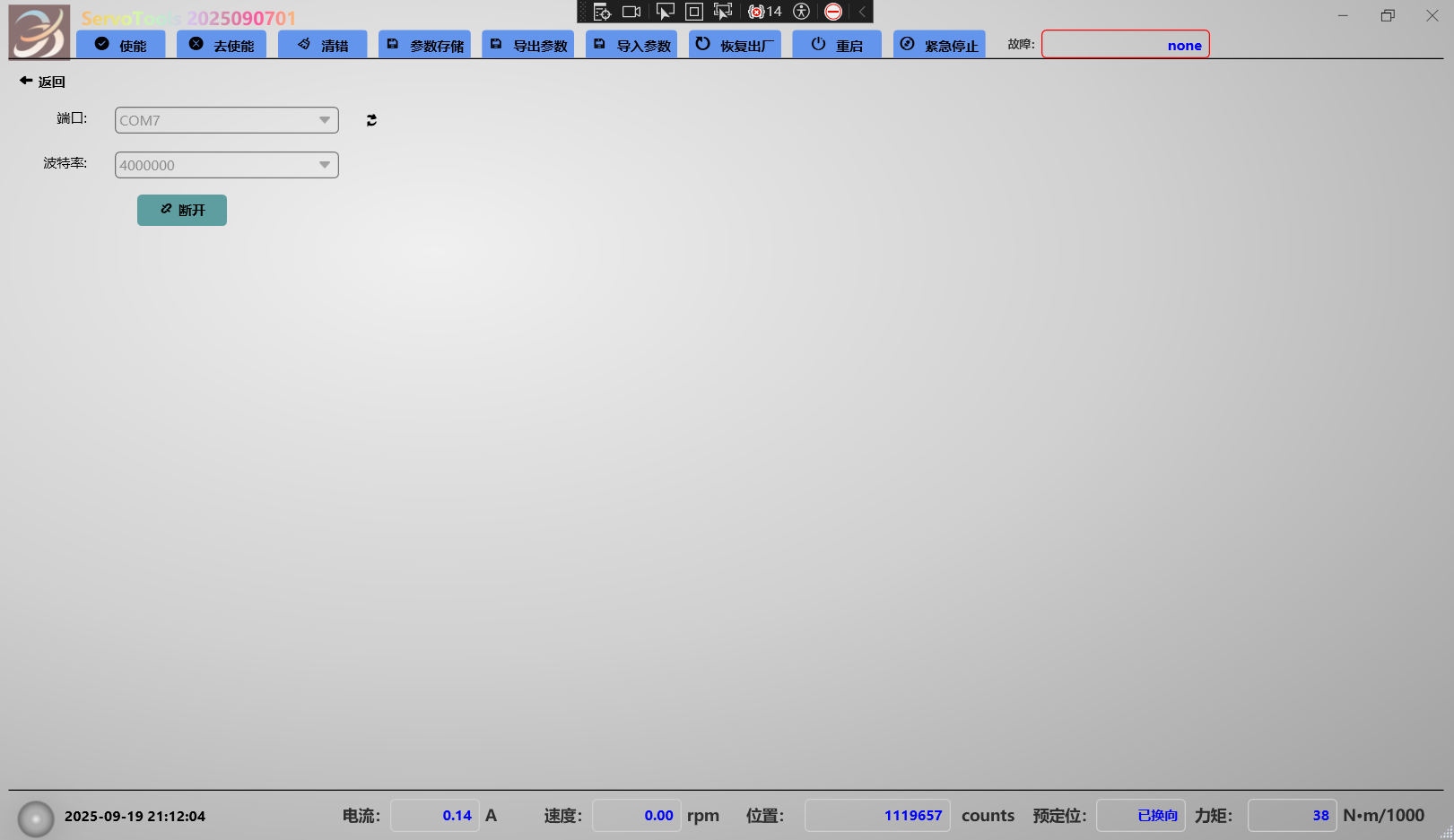
- 支持串口通讯(高速波特率 4Mbaps)
- 支持参数设置
- 支持初始电角度辨识
- 支持三环激励及PID参数调试(位置环、速度环、电流环)
- 支持四通道实时示波器(最高10KHz)
- 支持数据监控
- 支持不同加速计减速的速度JOG
- 支持初始及终点位置设置及往返次数的位置JOG
- 支持速度限制的力矩JOG
- 支持参数保存及导入导出
视频展示:
伺服上位机PTP展示
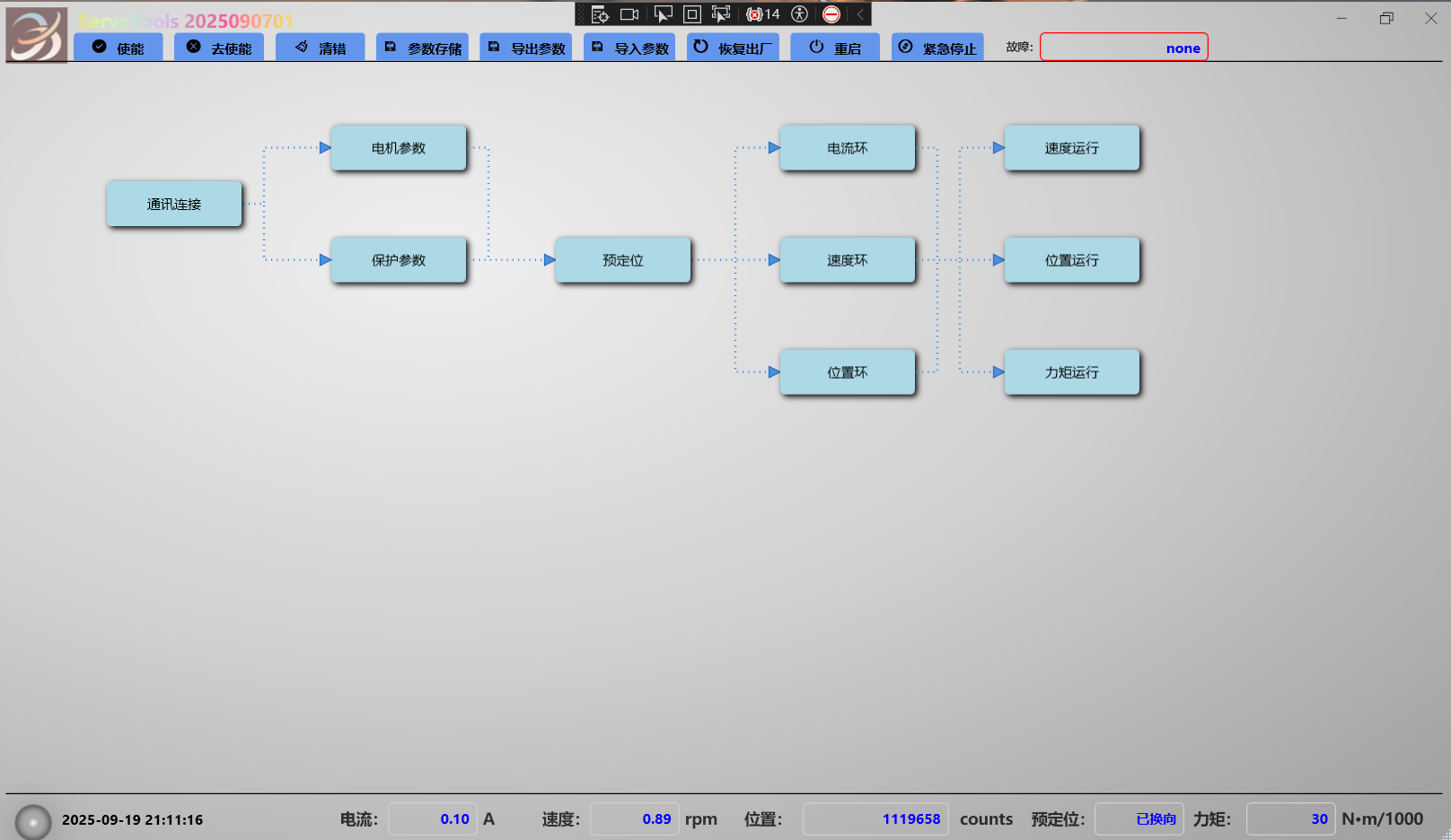
首页
通讯连接
电机参数

- 支持电机参数及编码器参数设置
- 支持BLDC及PMSM电机
电流环
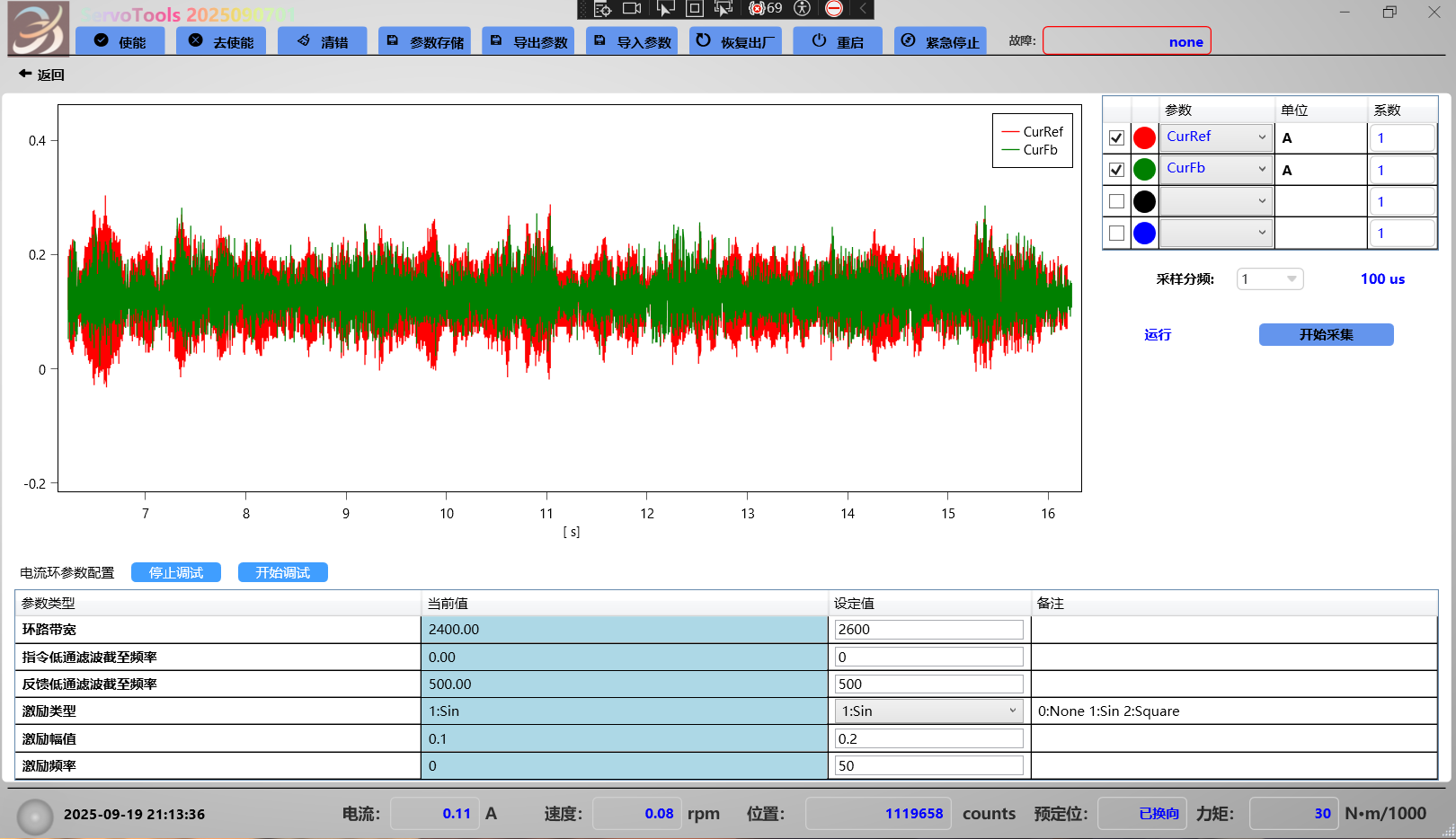
- 环路激励类型支持方波及正弦波
- 支持实时环路PID调试
速度环
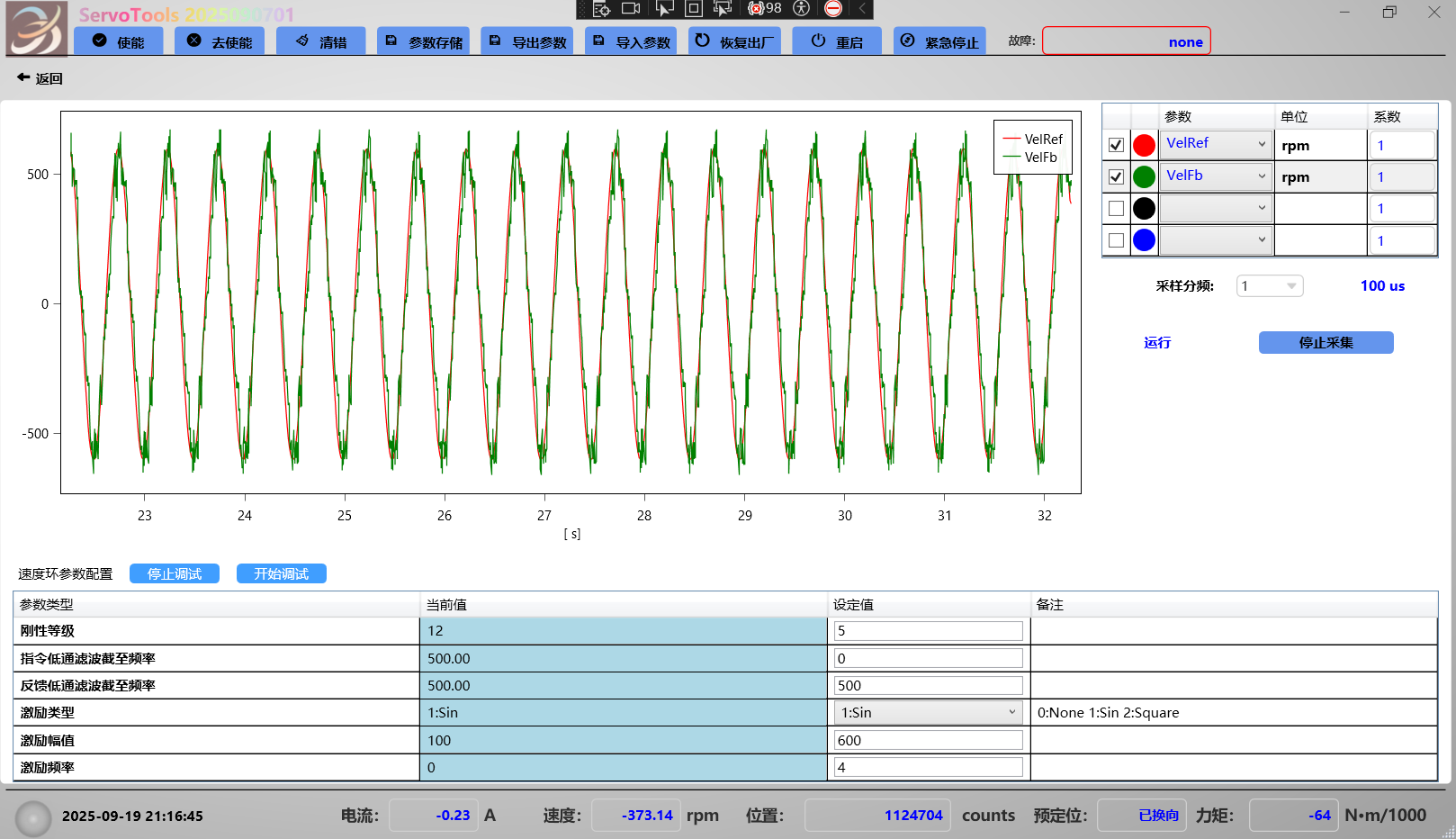
- 环路激励类型支持方波及正弦波
- 支持实时环路PID调试
位置环
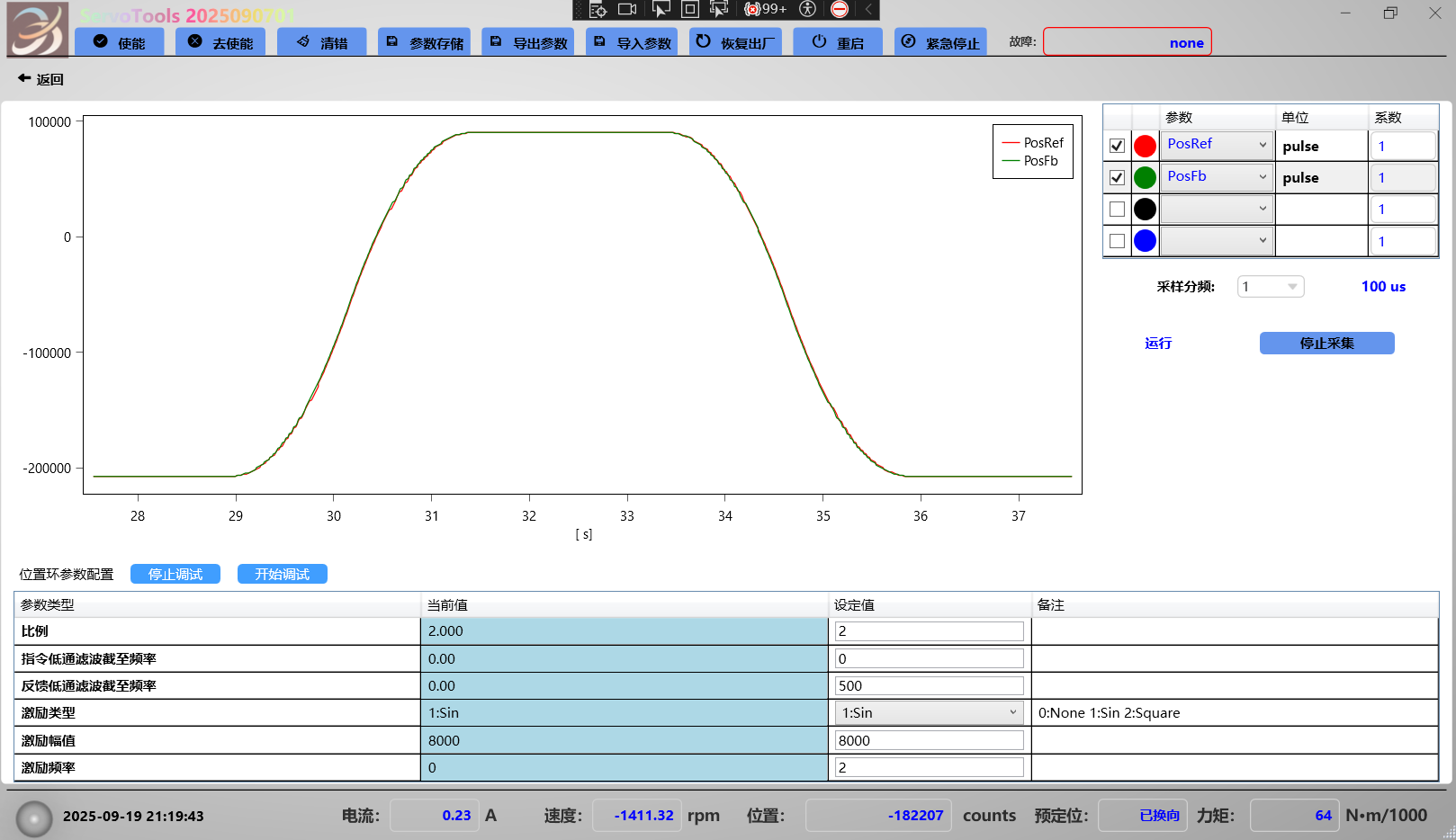
- 环路激励类型支持方波及正弦波
- 支持实时环路PID调试
速度JOG
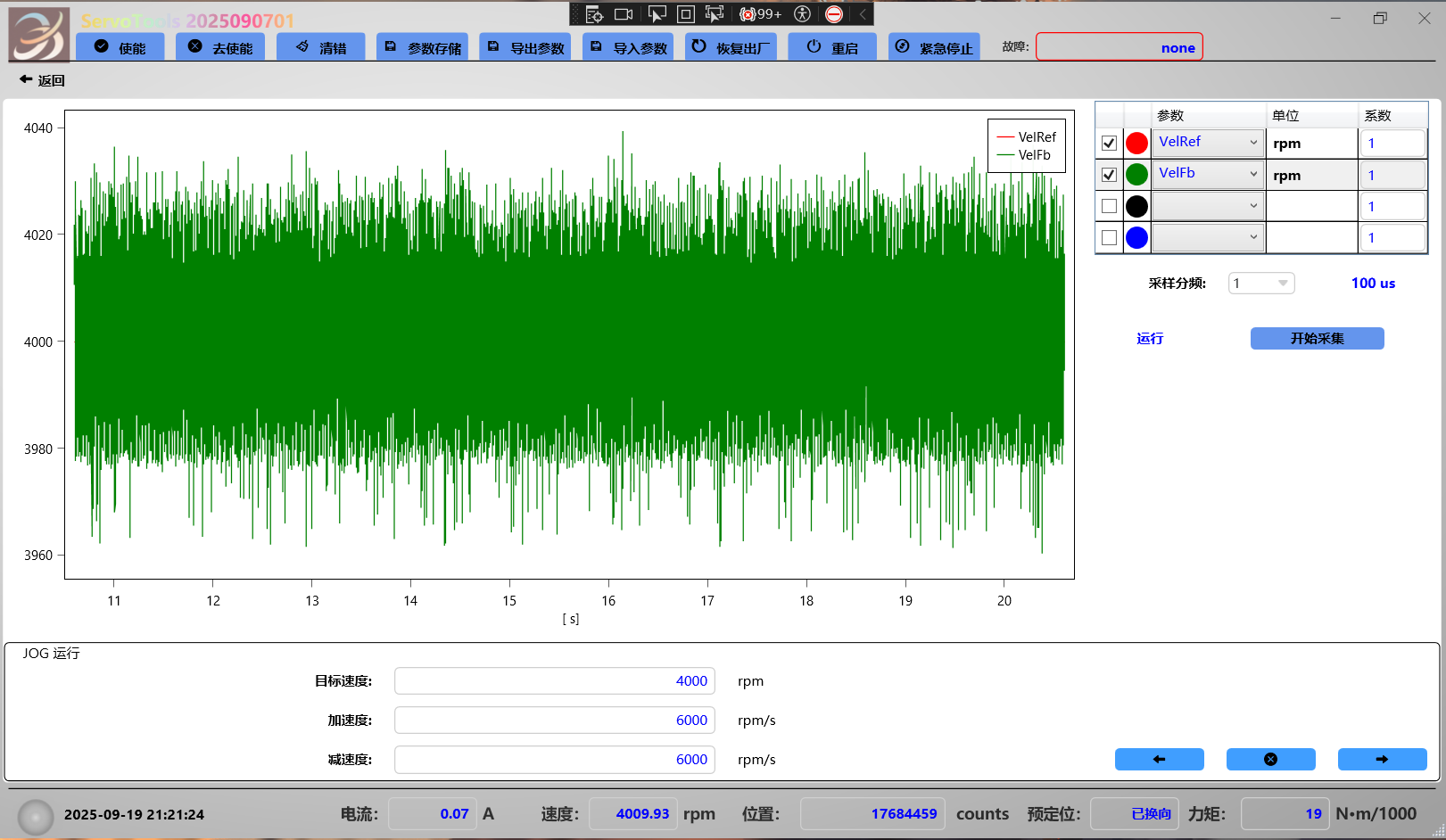
- 支持速度正向和反向及停止
位置JOG(仿汇川)
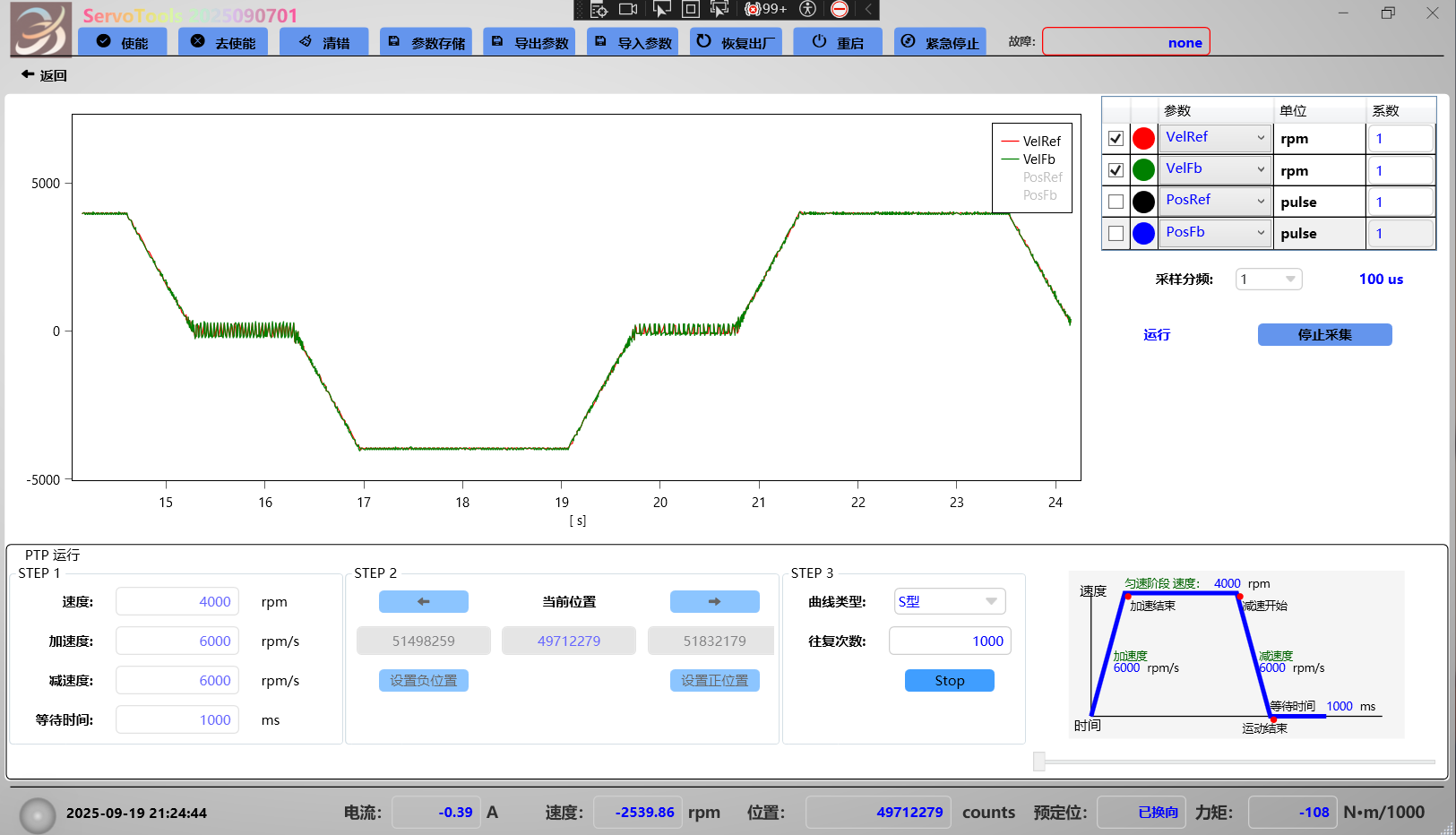
- 支持点动位置
- 支持正负位置设置
- 支持速度,加速度,减速度,等待时间设置
- 支持T型位置,S型位置
- 支持往返次数设置
转矩JOG
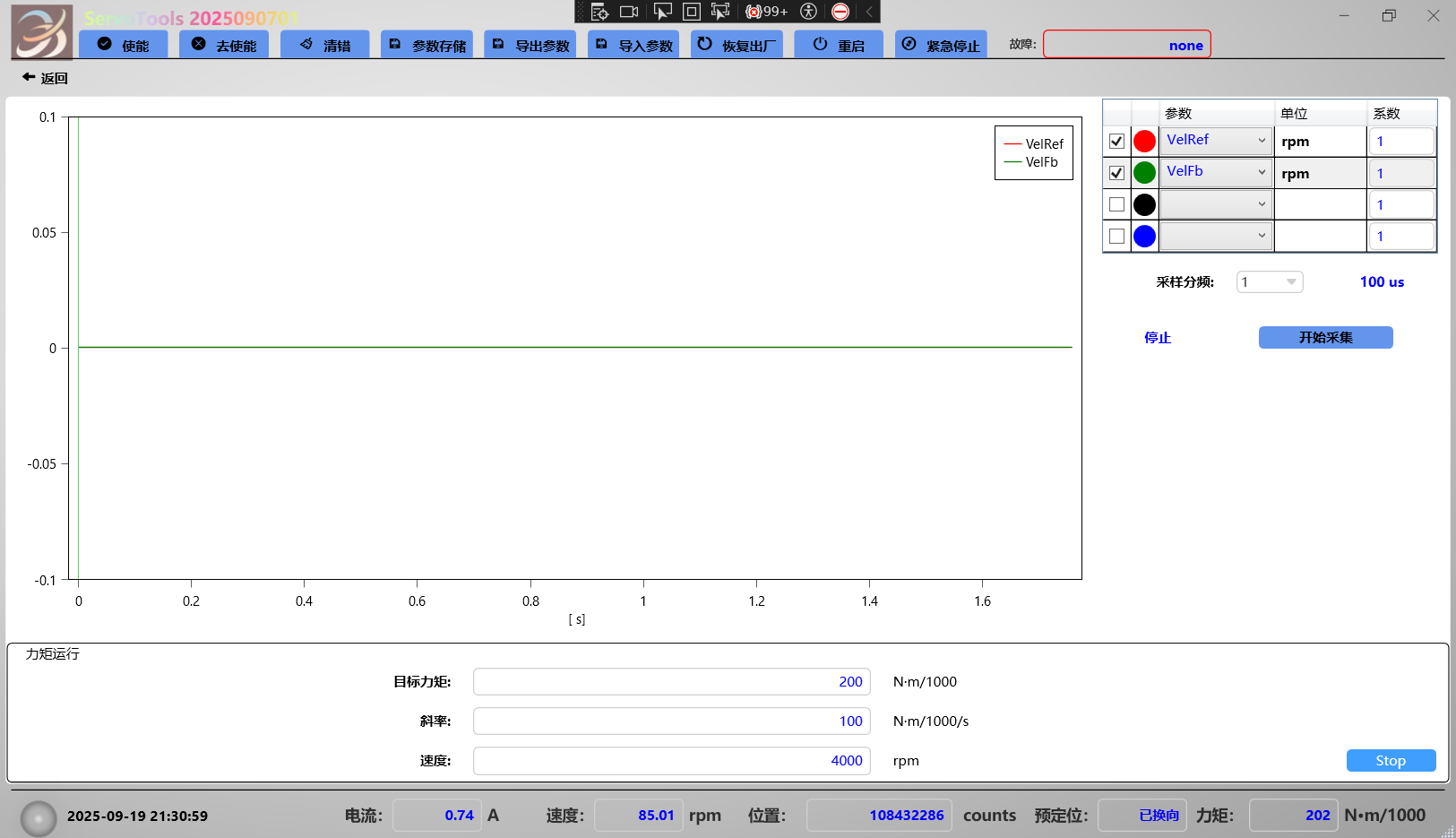
- 支持千分之力矩设置及斜率设置
- 支持速度限制设置