多色印刷机的高精度同步控制:EtherCAT与EtherNet/IP的集成应用
在多色印刷设备中,套准精度直接影响印刷质量。传统方案常采用单一现场总线,但在复杂多轴协同场景下存在局限性。某项目采用EtherCAT从站设备通过网关转换为EtherNet/IP主站,并集成EtherNet/IP伺服驱动器,在倍福PLC控制下实现高精度多轴同步。
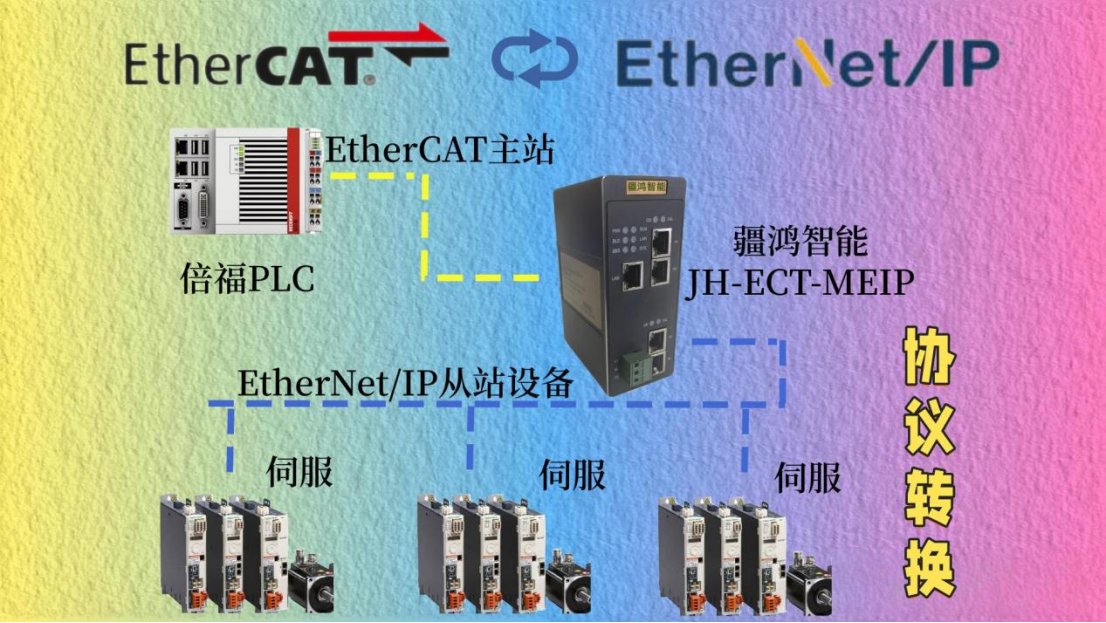
系统架构与通信设计
系统以倍福CX系列PLC为控制核心,通过EtherCAT总线连接印刷单元的各执行机构。关键改进在于:通过专用网关(疆鸿智能JH-ECT-MEIP)将部分EtherCAT从站设备(如色组编码器)转换为EtherNet/IP主站节点,并与第三方的EtherNet/IP伺服驱动器(如罗克韦尔Kinetix系列)协同工作。
网关设备需进行映射配置,将EtherCAT设备数据(如PDO)转换为EtherNet/IP的CIP对象模型。例如,编码器位置数据通过网关映射为EtherNet/IP的Assembly对象,供上位控制器访问。倍福PLC通过ADS协议与网关通信,实现对非原生EtherNet/IP设备的数据集成。

同步实现与精度保障
套准控制要求各色组轴之间的同步误差小于5微秒。系统利用EtherCAT的分布式时钟(DC)机制实现底层高精度同步,同时通过网关的时钟补偿功能,确保EtherCAT到EtherNet/IP转换过程中的时间一致性。EtherNet/IP驱动器采用CIP Sync协议,与主站时钟保持同步。
运动控制程序在倍福TwinCAT中开发,通过PLCopen功能块编程生成各轴套准补偿量。网关传输延迟通过硬件时间戳补偿,最终实现多轴协同误差控制在±1个编码器脉冲内。
配置要点与实施效果
网关配置需注意以下要点:
1. 在网关工具中映射EtherCAT从站的对象字典到EtherNet/IP接口
2. 配置CIP连接参数(如RPI时间)与PLC扫描周期匹配
3. 设置分布式时钟同步参数,减少时钟漂移

实际应用表明,该方案在保留EtherCAT高性能的同时,整合了EtherNet/IP设备的灵活性,套准精度稳定达到±0.05mm,满足了高速印刷机的工艺要求。
此方案适用于设备改造或混合协议环境,在保证性能的同时降低了系统集成成本,为多总线协同控制提供了实用参考。